Колійний датчик для визначення положення осі колеса та рахунку осей
Номер патенту: 59424
Опубліковано: 15.09.2003
Автори: Омельяненко Віктор Іванович, Лисенко Олег Олександрович, Волченко Володимир Геннадійович, Волченко Борис Геннадійович
Формула / Реферат
1. Колійний датчик для визначення положення осі колеса та рахунку осей, що містить корпус, розміщені в корпусі генератор, канал рахунку осей з коливальним контуром з котушкою індуктивності та першим детектором, другий коливальний контур з котушкою індуктивності, другий детектор та розгалужувач сигналу, який відрізняється тим, що в канал рахунку осей введені розгалужувач сигналу, другий коливальний контур з котушкою індуктивності та другий детектор, котушки індуктивності обох коливальних контурів виконані намоткою на феритові осердя, з’єднані по диференціальній схемі вмикання та розміщені в корпусі датчика послідовно з можливістю розміщення їх в робочому стані уздовж рейки по напрямку переміщення рухомого складу, в каналі для рахунку осей також додатково розміщені перший та другий резистори, перший та другий фільтри верхніх частот, підсумувальний підсилювач з фільтром нижніх частот, генератор датчика виконано високочастотним з підсумувальним керуючим входом, розгалужувач сигналу виконано регульованим, перший детектор виконано у вигляді детектора позитивного сигналу з фільтром нижніх частот, другий детектор виконано у вигляді детектора від’ємного сигналу з фільтром нижніх частот, вихід генератора з’єднано крізь розгалужувач сигналу з початком котушки індуктивності першого коливального контура та з кінцем котушки індуктивності другого коливального контура, одночасно другі кінці котушок індуктивності першого та другого коливальних контурів з’єднані з нульовим проводом диференціальної схеми вмикання, початок котушки індуктивності першого коливального контура та кінець котушки індуктивності другого коливального контура з'єднані відповідно через перший та другий резистори з підсумувальним керуючим входом генератора позитивним зворотним зв’язком та через фільтри верхніх частот зі входами першого та другого детекторів з фільтрами нижніх частот, виходи першого та другого детекторів з фільтрами нижніх частот з’єднані зі входами підсумувального підсилювача з фільтром нижніх частот, вихід якого є виходом колійного датчика.
2. Колійний датчик за п. 1, який відрізняється тим, що керований розгалужувач сигналу виконано у вигляді змінного резистора, середній контакт якого з’єднано з виходом генератора, а крайні контакти підключені до початку котушки індуктивності першого коливального контуру і до кінця котушки індуктивності другого коливального контуру.
3. Колійний датчик за п. 1, який відрізняється тим, що його корпус виконано з можливістю повороту датчика навколо вертикальної осі при розміщенні його на рейці.
Текст
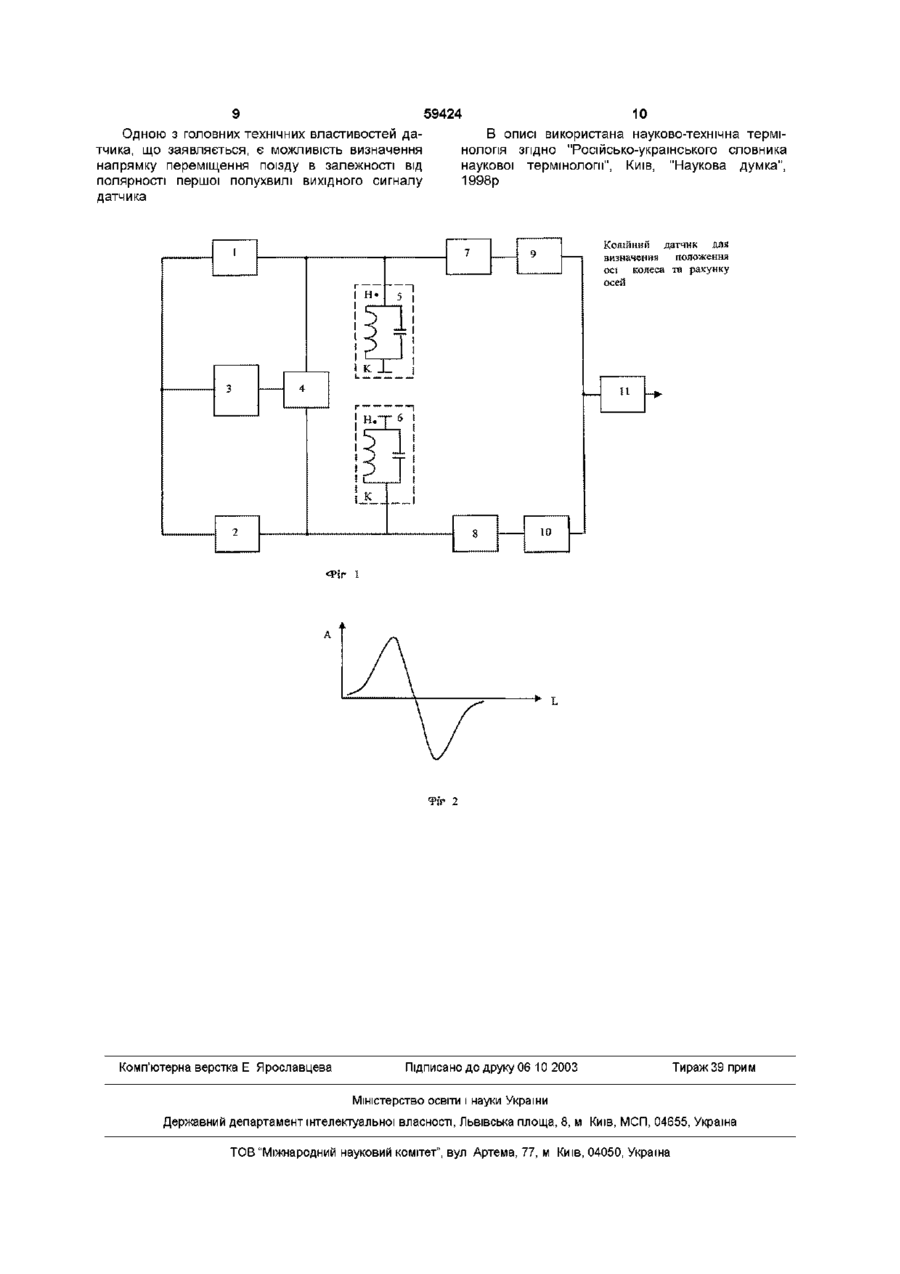
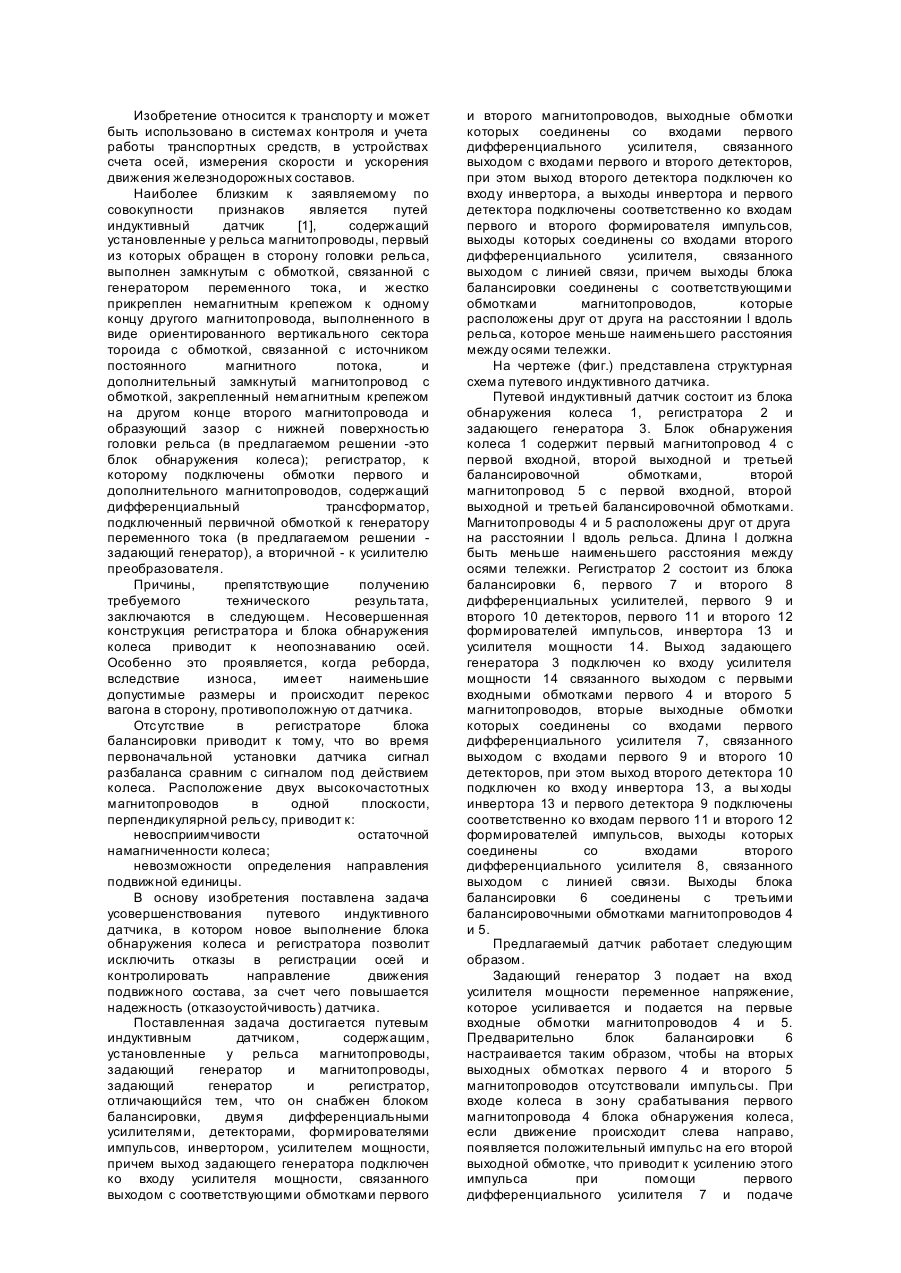
1 Колійний датчик для визначення положення осі колеса та рахунку осей, що містить корпус, розміщені в корпусі генератор, канал рахунку осей з коливальним контуром з котушкою індуктивності та першим детектором, другий коливальний контур з котушкою індуктивності, другий детектор та розгалужувач сигналу, який відрізняється тим, що в канал рахунку осей введені розгалужувач сигналу, другий коливальний контур з котушкою індуктивності та другий детектор, котушки індуктивності обох коливальних контурів виконані намоткою на феритові осердя, з'єднані по диференціальній схемі вмикання та розміщені в корпусі датчика послідовно з можливістю розміщення їх в робочому стані уздовж рейки по напрямку переміщення рухомого складу, в каналі для рахунку осей також додатково розміщені перший та другий резистори, перший та другий фільтри верхніх частот, підсумувальний підсилювач з фільтром нижніх частот, генератор датчика виконано високочастотним з підсумувальним керуючим входом, розгалужувач сигналу виконано регульованим, перший Колійний датчик може використовуватись на залізничному транспорті для його автоматизації, зокрема для визначення положення осі колеса по відношенню до центру датчика та рахунку осей при проходженні поїзду над колійним датчиком Відома магнітно індукційна неконтактна педаль типу "ПБМ=56", яка використовується для визначення положення колеса та рахунку осей, наприклад, поїзду/В П Бухгольц, Г А Красовский, детектор виконано у вигляді детектора позитивного сигналу з фільтром нижніх частот, другий детектор виконано у вигляді детектора від'ємного сигналу з фільтром нижніх частот, вихід генератора з'єднано крізь розгалужувач сигналу з початком котушки індуктивності першого коливального контура та з кінцем котушки індуктивності другого коливального контура, одночасно другі КІНЦІ котушок індуктивності першого та другого коливальних контурів з'єднані з нульовим проводом диференціальної схеми вмикання, початок котушки індуктивності першого коливального контура та кінець котушки індуктивності другого коливального контура з'єднані ВІДПОВІДНО через перший та другий резистори з підсумувальним керуючим входом генератора позитивним зворотним зв'язком та через фільтри верхніх частот зі входами першого та другого детекторів з фільтрами нижніх частот, виходи першого та другого детекторів з фільтрами нижніх частот з'єднані зі входами підсумувального підсилювача з фільтром нижніх частот, вихід якого є виходом колійного датчика 2 Колійний датчик за п 1, який відрізняється тим, що керований розгалужувач сигналу виконано у вигляді змінного резистора, середній контакт якого з'єднано з виходом генератора, а крайні контакти підключені до початку котушки індуктивності першого коливального контуру і до кінця котушки індуктивності другого коливального контуру 3 Колійний датчик за п 1, який відрізняється тим, що його корпус виконано з можливістю повороту датчика навколо вертикальної осі при розміщенні його на рейці А Э Штанке "Путевые датчики контроля подвижного состава на рельсовом транспорті", М , "Транспорт", СССР, 1976г/ Педаль має основу, що забезпечує кріплення педалі до рейки, на основі розміщено магніт розміром 60х68х80мм з насадженою на його катушкою /500 витків, провід ПЭЛШО 0,27мм/ Педаль установлюється на підґрунті рейки О ю 59424 внутрі коли так, що верхня площина магніту відстоїть на 10мм від нижньої грані головки рейки Педаль "ПБМ-56" використана як аналог в заявці Наближення феромагнітної маси колеса до центру магніту педалі збільшує проводимість шляхів потоку магніту В котушці індукується е р с , амплітуда якої пропорційна швидкості руху колеса і змінює свою полярність при його віддаленні від центру магніту Педаль має такі недоліки залежність сигналу від швидкості поїзду, непрацездатність при невеликих швидкостях переміщення рухомого транспорту, незахищеність від ЗОВНІШНІХ електромагнітних полів, неможливість по формі сигналу визначити направлення руху поїзду Відомий також пристрій для підрахунку проходу осей коліс виробництва Франції з електронною педаллю "Д50" /Министерство путей сообщения СССР, Главное управление сигнализации, связи и вычислительной техники "Система автоматического контроля технического состояния подвижного состава по ходу поезда", ДИСК-БКВ-Ц, Технология обслуживания, стр 25/, що використано як другий аналог Пристрій містить - датчик, електронна педаль "Д50" /зчитуюча голівка/, - основа датчика /кронштейн, що забезпечує кріплення датчика до рейки/, - з'єднувальну коробку /електронну систему обробки інформації/ Зчитуюча голівка встановлюється на рейці всередині коли та складається з пасивних елементів /розімкнений магнітопровід з обмоткою/, реагуючих на прохід реборди колеса без використання механічного контакту Датчик після вмикання випромінює електромагнітне поле частотою 50кГц, показники якого змінюються при проходженні колеса /виникнення втрат у вигляді токів Фуко/ з'єднувальна коробка включає в себе електронний вузол, необхідний при обробці сигналу у разі детектування проходу колеса Якщо подається живлення /8,5 в ± 0,5 в/ на вхід з'єднувальної коробки на виході електронної схеми з "являється змінна напруга близька до синусоїди з частотою 50кГц±3%, вона накладається на напругу живлення Якщо колесо відсутнє в зоні чутливості датчика ефективне значення синусоїдального сигналу при навантаженні ЮООм складає 330мв±40мв При знаходженні колеса в зоні чутливості датчика ефективне значення сигналу на виході схеми менше за ЗЗмв До недоліків датчика типу "Д50" відносяться - низька точність визначення положення осі колеса відносно до датчика, що зв'язано з низькою стабільністю моментів виникнення та зриву генерації датчика, що залежить від ЗОВНІШНІХ факторів, наприклад, температури, вологості, покриття льодом чи снігом, брудом, ржавчиною та іншими факторами зовнішнього середовища, - неможливість визначення направлення переміщення поїзду Відомий індуктивний датчик зчитування та фіксації факту проходу колеса /патент РФ №2059493 від 08 12 1992р / прийнято в якості третього аналогу Пристрій, складається з чутливого елементу прикріпленого до основи, яка, в свою чергу прикрі плена до рейки Чутливий елемент має вигляд пластини з термопластичного матеріалу з закладеними в нього котушками індуктивності зробленими кожна з розміщеного у вигляді одношарової спіралі провідника Котушки розміщені одна за одною в одній площині на одній основі, ввімкнуті згідно для сигнального струму та назустріч для ЗОВНІШНІХ електромагнітних полів та формують робочу зону чутливості, що обмежена їх геометричними розмірами Конструкція датчика дозволяв легко замінити чутливий елемент До недоліків пристрою відносяться - непрацездатність при невеликих швидкостях рухомого складу, ще зв'язано з залежністю амплітуди вихідного сигналу від швидкості руху, наприклад, поїзду, - зниження точності виявлення положення осі колеса відносно датчика за рахунок перешкод від тягових струмів, оскільки принцип компенсації при подавлені перешкод від тягових струмів потребує використання ідентичних котушок, виготовлення яких звязано з великими труднощами, - крім того змінення ЗОВНІШНІХ факторів також неоднаково впливає на котушки В якості прототипу використано колійний датчик для рахунку осей /патент й №2096222 від 08 04 1996р/ в якому розміщено кварцевий генератор, канал рахунку осей, вміщуючий перший коливальний контур, що складається з конденсатора та котушки індуктивності, розміщеної біля рейки, перший детектор, підключений до інверсних входів першого та другого комораторів, перший подільник напруги та формувач рахункових імпульсів Другий канал контролю положення колійного датчика відносно шийки рейки вміщує другий підсилювач, другий коливальний контур, вміщуючий конденсатор та котушки індуктивності, встановлений біля рейки, другий детектор підключений до третього компоратора і третій подільник напруги Головна задача, що вирішується - підвищення надійності та зпрощення пристрою Прототип має два коливальних контуру паралельного типу, входы яких підключені крізь підсилювачі до виходу єдиного генератора Однак, для формування імпульсу при проходженні колеса використовується канал тільки одного коливального контуру, а канал другого коливального контуру є допоміжним та використовується для контролю положення датчика відносно шийки рейки Коливальний контур каналу обліку осей у прототипі складається з конденсатора та котушки індуктивності, розміщеної біля рейки Сигнал з виходу коливального контуру детектується та з виходу детектора поступає на інверсний вхід компоратора, а на прямий вхід з - подільника напруги На паралельно з'єднані подільник напруги та ємність сигнал поступає з виходу детектора крізь розв'язуючий діод, підключений анодом до виходу детектора Канал обліку осей в прототипі працює таким чином При відсутності колеса у зоні контролю на виході коливального контуру має місце максимальна напруга та на виході компоратор має від'ємний потенціал Конденсатор заряджений до напруги резонансу в коливальному контурі При проході колеса понад котушкою індуктивності виникає роз 59424 лад коливального контуру, напруга на інверсному вході компоратора зменшується та на виході його з'являється позитивний сигнал, з якого формується імпульс визначеної тривалості, сигналізуючий про проходження колеса понад центром датчика При цьому виникає повільний розряд конденсатора та, ВІДПОВІДНО, зменшення порогу напруги з подільника напруги на прямому вході компоратора Після проходу колеса понад датчиком напруга на інверсному вході знову збільшується та на виході компоратора заявляється від'ємний потенціал, таким чином, робота прототипу заснована на формуванні сигналу на виході датчика при проходженні колеса над датчиком при порівнюванні сигналу з виходу детектора з сигналом запам'ятованим на ємності з подільника напруги до появи колеса До недоліків прототипу треба віднести - значні похібки при підрахунку осей коліс за рахунок зниження швидкості переміщення рухомого складу В цьому разі зменшення розряду ємності приводить к зміцненню порогу компоратора, та, як наслідок, к зниженню точності виявлення положення осі колеса відносно датчика, - значні похібки зв'язані з зупинкою колеса понад датчиком Ємність розраджується до напруги з виходу детектора на прямому вході компоратора, що приводить при начальному переміщенні рухомого складу к пропуску колеса при рахунку осей, - залежність точності та працездатності датчика від перешкод зв'язаних з появою тягових струмів, - неможливість визначення спрямування переміщення рухомого складу При розробці винаходу, що заявляється, вирішувалась задача створення колійного датчика визначення положення осі колеса та обліку осей рухомого складу, датчика позиційного типу, дозволяючого проводити вимірювання з високою точністю незалежно від спрямування переміщення рухомого складу, його швидкості, похібки від виникнення тягових струмів, що проходять по рейці, та змінення факторів зовнішнього середовища Для вирішення поставленої задачі у відомий колійний датчик визначення положення осі колеса та рахунку о сей, вміщуючий корпус з розміщеними в ньому генератором, каналом рахунку осей з коливальним контуром з котушкою індуктивності та першим детектором, а також розміщеними в корпусі другим коливальним контуром з котушкою індуктивності, другим детектором та розгалужувач сигналу, в канал для рахунку осей введені другий коливальний контур з котушкою індуктивності та другий детектор Котушки індуктивності виконані намоткою на феритові осердя, з'єднані по диференціальній схемі вмикання та при розміщенні корпусу на рейці розположені послідовно по напрямку переміщення рухомого складу Вкканалі для рахунку осей також додатково розміщені перший та другий резистори, перший та другий фільтри верхніх частот, підсумувальний підсилювач з фільтром нижніх частот, генератор датчика виконано високочастотним з підсумувальним керуючим входом, розгалужувач сигналу виконано регульованим, перший детектор виконано у вигляді детектору позитивного сигналу з фільтром нижніх частот, другий детектор виконано у вигляді детектору від'ємного сигналу з фільтром нижніх частот Вихід генератора з'єднано крізь роз галужувач сигналу з початком котушки індуктивності першого коливального контуру та з кінцем котушки індуктивності другого коливального контуру, одночасно другі КІНЦІ котушок індуктивності першого та другого коливальних контурів з'єднані з нульовим проводом диференціальної схеми вмикання, початок котушки індуктивності першого коливального контуру та кінець котушки індуктивності другого коливального контуру з'єднані ВІДПОВІДНО крізь перший та другий резистори з підсумувальним керуючим входом генератора позитивним зворотнім звязком та крізь фільтри верхніх частот зі входами першого та другого детекторів з фільтрами нижніх частот, виходу першого та другого детекторів з фільтрами нижніх частот з'єднані зі входами підсумувального підсилювача з фільтром нижніх частот, вихід якого є виходом колійного датчику Додатково, в колійному датчику керований розгалуживач сигналу виконано у вигляді змінного резистора, середній контакт якого з'єднано звиходом генератора, а крайні контакти підключені до початку котушки індуктивності першого коливального контуру та до кінця котушки індуктивності другого коливального контуру Корпус колійного датчику виконано з можливістю повороту датчика навколо вертикальної осі при розміщенні на рейці Поставлена задача вирішена за рахунок того, що пристрій, який заявляється, колійний датчик визначення положення осі колеса та рахунку осей рухомого складу, дозволяє, у ВІДМІННОСТІ ВІД прототипу - визначати положення осі колеса, по амплітуді та полярності вихідного сигналу, тобто визначати факт фіксації осі колеса відносно датчика незалежно від швидкості рухомого складу, що забезпечується створенням датчика позиційного типу, - забезпечити досягнення високої точності визначення положення осі колеса відносно середини датчика незалежно від змін ЗОВНІШНІХ факторів оточуючого середовища за рахунок використання диференціальної схеми включення котушок індуктивності та, ВІДПОВІДНО, одержання високої крутизни зміни вихідного сигналу при переході крізь нуль /суміщення осі колеса з серединою датчика ±1-ь2мм/, - заглушення перешкоди, зв'язаної з проходженням тягових струмів, забезпечується диференціальною схемою включення котушок коливальних контурів, при яких перешкоди, наведені в обох котушках, при підсумуванні знешкоджують одна одну, - додаткове заглушення перешкоди від тягових струмів по рейці забезпечується фільтрами верхніх частот, оскільки висока робоча частота датчика /ЗО 40/ кГц дозволяє відфільтрувати низькочастотну перешкоду /100Гц/, пов'язану з проходженням тягових струмів, - використання в датчику фільтрів нижніх частот дозволяє виділити корисний сигнал та заглушити високочастотні електромагнітні перешкоди, - датчик дозволяє визначати напрямок пере 59424 міщення ходового складу но полярності першої полухвилі вихідного сигналу На Фіг 1 зображена блок-схема колійного датчика для визначення положення осі колеса та рахунку осей На Фіг 2 зображена зміна вихідного сигналу датчика при проходженні колеса у напрямку від котушки індуктивності першого коливального контуру до котушки індуктивності другого коливального контуру Датчик вміщує 1 - опір ланцюга позитивного зворотнього зв'язку, 2 - опір ланцюга позитивного зворотнього зв'язку, 3 - високочастотний генератор з під суму вальним керуючим входом, 4 - регульований розгалужувач сигналу, 5 - коливальний контур паралельного типу, вміщуючий котушку з феритовим осердям та конденсатор, 6 - коливальний контур паралельного типу, вміщуючий котушку з феритовим осердям та конденсатор, 7 - фільтр верхніх частот /ВЧ/, 8 - фільтр верхніх частот /ВЧ/, 9 - амплітудний детектор позитивного сигналу з фільтром нижніх частот /НЧ/, 10 - амплітудний детектор від'ємного сигналу з фільтром нижніх частот/НЧ/, 11 - підсумувальний підсилювач з фільтром нижніх частот /НЧ/ Стандартні елементи блок-схеми датчика описані в слідуючих виданнях довідник "Радиокомпоненты и материалы" О,Н Партала, Москва, "Радіоаматор" Київ", "КУБК-а", Москва, КБ, 1996г та виконані а/ під снувальний підсилювач - мікросхема типу К544УД2А б/ генератор - мікросхема типу КІ4ОУДІ7А в/ регульований розгалужувач сигналу - перемінний резистор типу СП5-3 г/ елементна база датчика - прецизійні резистори та ємності з малим температурним коефіцієнтом ЯКС, ТКЕ/, д/ амплітудні детектори - діоди типу КД522Б є/ фільтри верхніх та нижніх частот - резистори та ємності Колійний датчик для визначення положення осі колеса та рахунку осей, що заявляється, конструктивно виконано в одному корпусі При кріпленні його до рейки котушки коливальних контурів 5,6 каналу обліку осей розміщені біля рейки одна за одною Високочастотний генератор 3 з підсумувальним керуючим входом, на вхід якого заведені резистори 1, 2 позитивного зворотнього зв'язку з обох коливальних контурів 5, 6, забезпечує автоматичну настройку на сумісний резонанс f r и JT1 xf 2, де fi - резонансна частота коливального контуру 5, f2 - резонансна частота коливального контуру 6, що підвищує стабільність та ослаблює вплив розбіжності параметрів елементів коливальних контурів 5, 6 Амплітудні детектори позитивного та від'ємного сигналів з фільтрами нижніх частот за 8 безпечують виділення позитивного сигналу датчика Настройка датчика при його установці на рейці полягає утому, що на його виході встановлюється нульовий сигнал, що забезпечується в схемі датчика до його установки на рейці через вирівнювання напруг на коливальних контурах 5, 6 за допомогою регульованого розгалужувача сигналів 4 Додаткову регуліровку можна виконати за рахунок повороту датчика навколо вертикальної осі при установці його на рейці за рахунок віддалення чи приближения котушок до рейки Колійний датчик визначення положення осі колеса та рахунку осей рухомого складу працює таким чином На Фіг 2 відображена ситуація зміни амплітуди вихідного сигналу датчика при переміщенні рухомого складу у напрямку від котушки індуктивності коливального контуру 5 до котушки індуктивності коливального контуру 6 При наближенні колеса до котушки індуктивності коливального контуру 5 в нього вводяться додаткові втрати, котрі приводять до зменшення добротності коливального контуру 5 та зменшенню напруги на виході детектора 9 позитивної напівхвилі сигналу та напруга на вході сумуючого підсилювача II стає від'ємною, а на виході датчика, ВІДПОВІДНО, ПОЗИТИВНОЮ Друга фаза починається, коли ось колеса займає середнє положення понад двома котушками коливальних контурів 5,6 та колеси вносить практично рівні втрати в коливальні контури 5, 6, що вирівнює їх напругу, а як слідує з цього, на вході сумуючого підсилювача II сигнал стає рівним нулю та, ВІДПОВІДНО, рівень нулю також і на виході датчика При подальшому переміщенні колеса в напрямку котушки коливального контуру б більша частина втрат вноситься в коливальний контур 6 в зрівнянні з коливальним контуром І, що приводить до зменшення вихідної напруги на виході амплітудного детектора від'ємного сигналу 10 від'ємної напівхвилі сигналу та напруга на вході сумуючого підсилювача II стає позитивною, а на виході датчика від'ємною При віддаленні колеса від котушки індуктивності коливального контуру 6 нульовий рівень сигналу на виході датчика відновлюється Як показано на фіг 2 зміна вихідного сигналу на виході підсумлюючого підсилювача, з фільтром нижніх частот, тобто виході датчика, при переміщенні колеса у напрямку від котушки коливального контуру 5 до котушки коливального контуру 6 зв'язана з напрямом переміщення ходового складу При ЗМІНІ напрямку переміщення ходового складу у цьому випадку першою буде від'ємна полухвиля, а другою - позитивна Низькочастотну перешкоду від тягових струмів ліквідують диференціальною схемою включення котушок коливальних контурів 5, 6 Додаткове заглушення перешкоди від тягових струмів забезпечується за рахунок використання фільтрів верхніх частот 7, 8 Використання підсумлюючого підсилювача з фільтром нижніх частот II забезпечує заглушення високочастотних електромагнітних перешкод Можливість повороту корпусу датчика навколо вертикальної осі при його розміщенні на рейці також позитивно впливає на результати вимірювань 9 59424 Одною з головних технічних властивостей датчика, що заявляється, є можливість визначення напрямку переміщення поїзду в залежності від полярності першої полухвилі вихідного сигналу датчика 10 В описі використана науково-технічна термінологія згідно "Російсько-українського словника наукової термінології", Київ, "Наукова думка", 1998р Колійний датчик аля визначення положення осі колеса та рахунку осей
ДивитисяДодаткова інформація
Назва патенту англійськоюGauge sensor for definition of position of wheel axis and counting axes
Автори англійськоюOmelianenko Viktor Ivanovych
Назва патенту російськоюКолейный датчик для определения положения оси колеса и подсчета осей
Автори російськоюОмельяненко Виктор Иванович
МПК / Мітки
МПК: B61L 1/00
Мітки: рахунку, датчик, визначення, положення, осі, колеса, колійний, осей
Код посилання
<a href="https://ua.patents.su/5-59424-kolijjnijj-datchik-dlya-viznachennya-polozhennya-osi-kolesa-ta-rakhunku-osejj.html" target="_blank" rel="follow" title="База патентів України">Колійний датчик для визначення положення осі колеса та рахунку осей</a>
Колійний індуктивний датчик
Номер патенту: 21955
Опубліковано: 30.04.1998
Автори: Соболєв Юрій Володимирович, Бабаєв Михайло Михайлович, Ісаєв Леонід Олексійович, Прилипко Андрій Андрійович, Демченко Олег Федорович
МПК: B61L 1/00
Мітки: індуктивний, датчик, колійний
Формула / Реферат:
Путевой индуктивный датчик, содержащий установленные у рельса магнитопроводы, задающий генератор и регистратор, отличающийся тем, что регистратор снабжен блоком балансировки, двумя дифференциальными усилителями, двумя детекторами, двумя формирователями импульсов, инвертором, усилителем мощности, причем выход задающего генератора подключен ко входу усилителя мощности, выход которого соединен с первыми входными обмотками первого и второго...
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Іванов Робєрт Константіновіч, Ковалєвскій Міхаіл Марковіч, Карпов Анатолій Стєпановіч, Борісов Андрєй Владіміровіч, Монахов Юрій Владіміровіч, Рачук Владімір Сєргєєвіч
МПК: G01S 5/02, G01S 5/00, G01S 5/04
Мітки: положення, об'єкта, координат, базової, варіанти, системі, відносної, спосіб, навігаційної, інерціальної, визначення, осей
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Датчик кутових переміщень з електронною схемою визначення кута нахилу
Номер патенту: 50687
Опубліковано: 15.10.2002
Автори: Галицький Анатолій Петрович, Павленко Юрій Федорович
МПК: G01P 15/13
Мітки: нахилу, схемою, датчик, визначення, переміщень, кутових, електронною, кута
Формула / Реферат:
Датчик кутових переміщень, що містить механічну частину, що складається з маятника, підвішеного на, щонайменше, одній балці, двох котушок індуктивності, що входять до складу датчиків відхилення маятника від середнього положення, і двигуна лінійного типу, що має котушку індуктивності, розташовану на маятнику, і два магніти з зустрічно орієнтованими полями, які розташовані з боків котушки і закріплені нерухомо, і електронну частину, що включає...
Пристрій рахування осей рухомого складу

Номер патенту: 50423
Опубліковано: 15.10.2002
Автори: Дуб Віктор Юрійович, Разгонов Адам Пантелійович
МПК: B61L 1/00
Мітки: осей, складу, рухомого, рахування, пристрій
Формула / Реферат:
Пристрій рахування осей рухомого складу, що містить датчик, регістр, сигналізатор відходу датчика від рейки і котушки, який відрізняється тим, що вихрострумовий датчик з обмоткою збудження, підключеної до вторинної обмотки трансформатора, первинна обмотка якого через резистор приєднана до виходу генератора струму, із п'ятьма приймальними котушками, розташованими ортогонально відносно осі збудження, виходи сигнальних котушок через підсилювачі,...
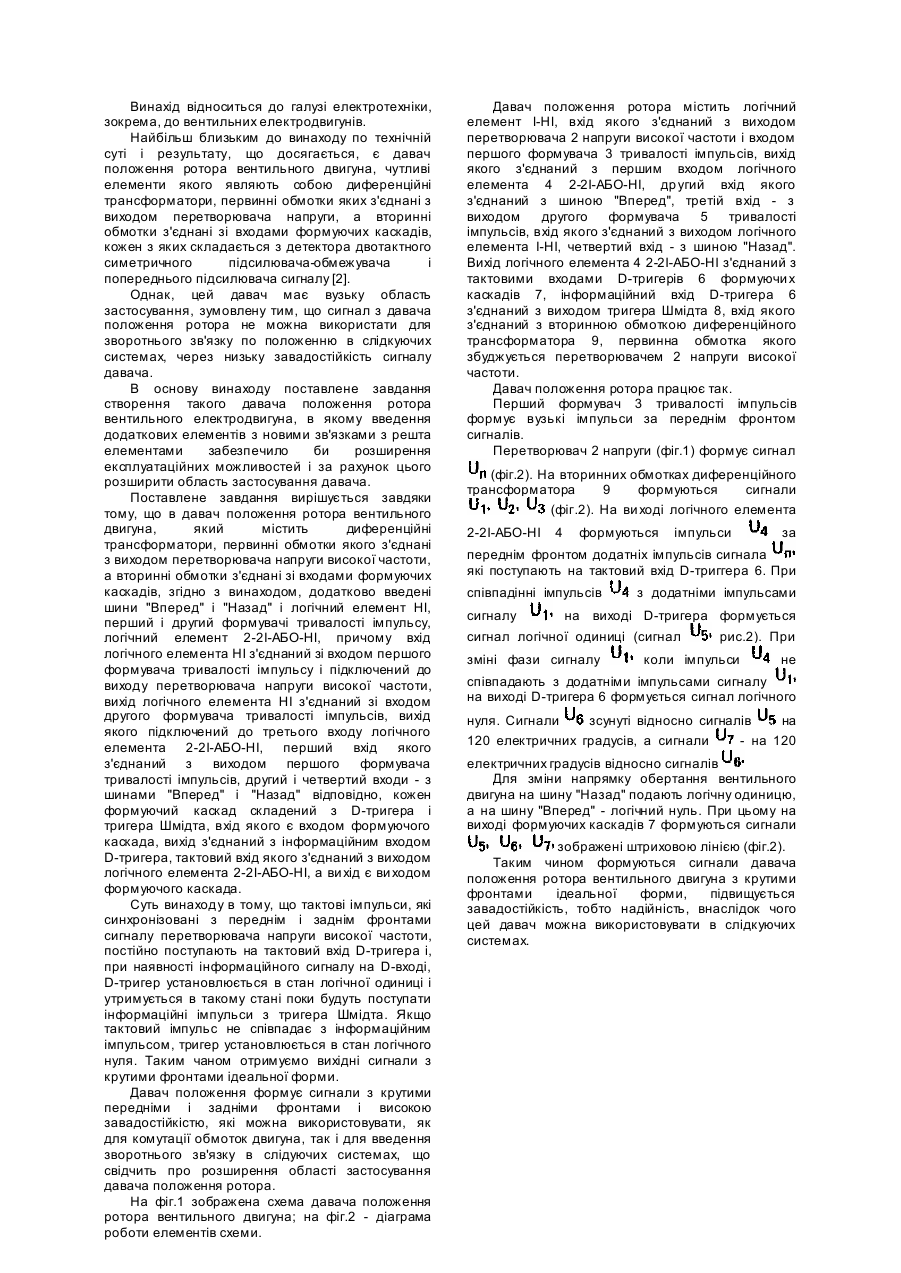
Датчик положення ротора вентильного двигуна
Номер патенту: 18440
Опубліковано: 25.12.1997
Автори: Чайковський Роман Іванович, Ткачук Василь Іванович, Літинський Зенон Михайлович, Осідач Юрій Володимирович
МПК: H02K 29/06
Мітки: положення, вентільного, датчик, ротора, двигуна
Формула / Реферат:
Датчик положения ротора вентильного двигателя, содержащий дифференциальные трансформаторы, первичные обмотки которых соединены с выходом преобразователя напряжения высокой частоты, а вторичные обмотки соединены с входами формирующих каскадов, отличающийся тем, что он снабжен шинами "Вперед" и "Назад", и в него введены логический элемент НЕ, первый и второй формирователи длительности импульса, логический элемент...
Попередній патент: Часткове або повне пересування зображень на рекламних щитах, панелях та тентах (варіанти)
Наступний патент: Автокомпенсатор завад цифровий
Випадковий патент: Повний знімний протез верхньої щелепи