Пристрій для контролю буксування рушіїв енергетичного засобу
Номер патенту: 38949
Опубліковано: 26.01.2009
Автори: Митрофанов Олександр Петрович, Кучеренко Володимир Григорович, Легкодух Наталя Федорівна, Бондарев Євген Ілліч

Формула / Реферат
1. Пристрій для контролю буксування рушіїв енергетичного засобу, що містить шляховимірювальне колесо, датчики обертів шляховимірювального колеса та вала відбору потужності (ВВП) енергетичного засобу, додатковий регулятор чутливості, з'єднаний з датчиком обертів ВВП, перший блок формувача імпульсів, вхід якого з'єднано з виходом датчика обертів шляховимірювального колеса, другий блок формувача імпульсів, вхід якого з'єднано з виходом додаткового регулятора чутливості, який відрізняється тим, що формувачі імпульсів, які містять підсилювачі та компаратори, з'єднано з входами зовнішнього переривання INT0 та INT1 мікропроцесора, який шиною даних В та виходом ALE з'єднано з адресним регістром, шиною даних В та шиною адреси А з'єднано з програмно-запам'ятовуючим пристроєм, двома виходами WR та А15 з'єднано з елементом АБО-НІ, вихід елемента АБО-НІ з'єднано з регістром коду символу, який, в свою чергу, через шину даних В з'єднано з мікропроцесором, мікропроцесор трьома виходами з'єднано з дешифратором-мультиплексором та через інвертор з дев'ятим розрядом індикатора, виходи дешифратора-мультиплексора з'єднано з катодами індикатора, виходи регістра коду символу через струмообмежувальні резистори з'єднано з анодами індикатора.
2. Пристрій для контролю буксування рушіїв енергетичного засобу за п. 1, який відрізняється тим, що схема нуля через конденсатор з'єднана з нульовим виходом інвертора, а вихід схеми з'єднано з входом RST мікропроцесора.
Текст
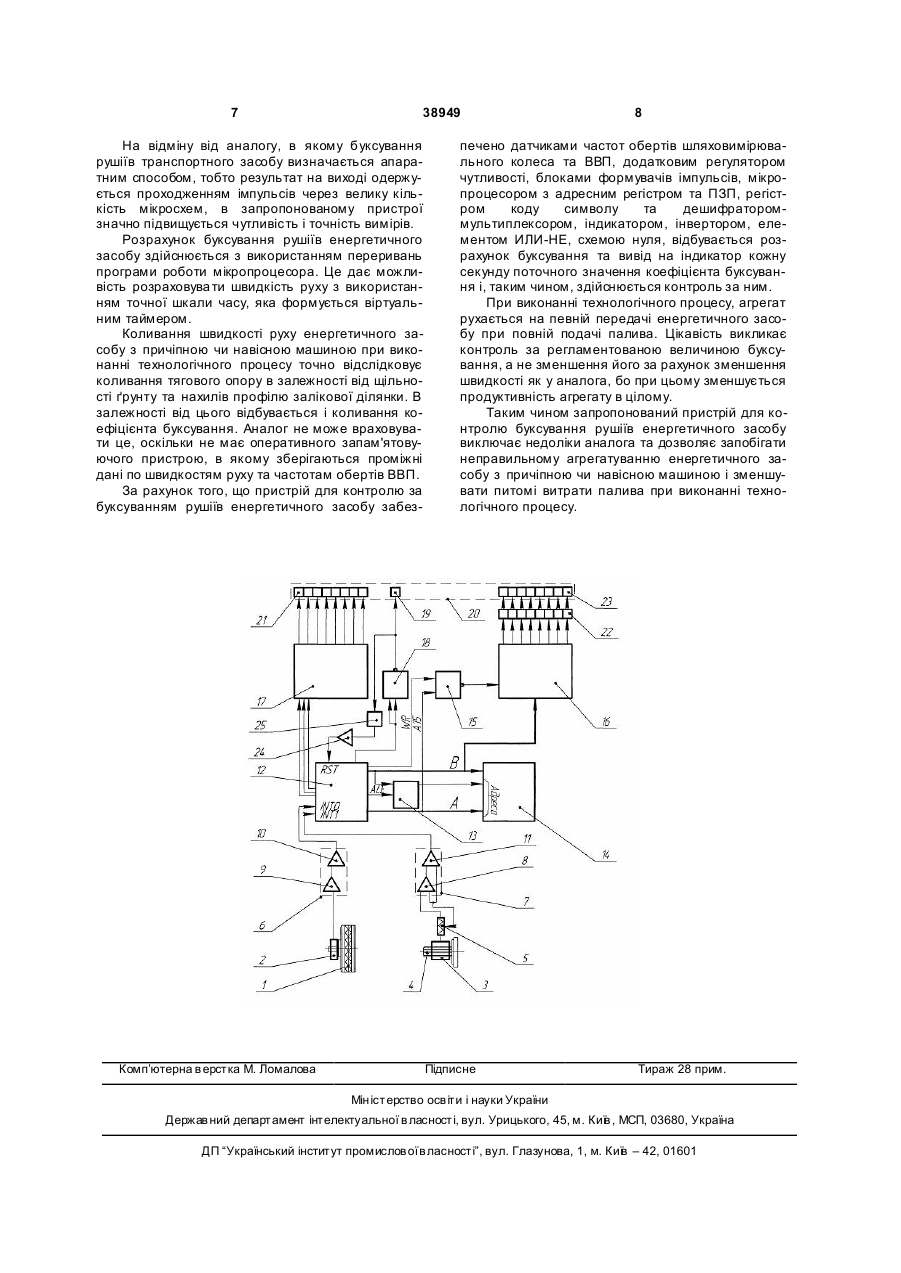
1. Пристрій для контролю буксування рушіїв енергетичного засобу, що містить шляховимірювальне колесо, датчики обертів шляховимірювального колеса та вала відбору потужності (ВВП) енергетичного засобу, додатковий регулятор чутливості, з'єднаний з датчиком обертів ВВП, перший блок формувача імпульсів, вхід якого з'єднано з виходом датчика обертів шляховимірювального колеса, другий блок формувача імпульсів, вхід якого з'єднано з виходом додаткового регулятора U 2 (19) 1 3 38949 Недоліки аналога: - низька чутливість пристрою, обумовлена тим, що датчик частоти обертів встановлено на ведучи х колесах енергетичного засобу. Як наслідок - до формувача імпульсів надходить всього один імпульс за один оберт ведучого колеса; - недостатня точність визначення буксування рушіїв та неможливість контролю за ним. Недоліки аналогу викривляють реальну величину буксування, що призводить до збільшення паливно-енергетичних витрат при експлуатації енергетичного засобу та неправильне агрегатування трактора з причіпною чи навісною машиною в залежності від тягового опору цієї машини. В основу корисної моделі поставлено задачу підвищення чутливості пристрою і точності визначення та контролю за буксуванням рушіїв енергетичного засобу, запобігання неправильному агрегатуванню енергетичного засобу з навісною чи причіпною машиною, що дасть змогу: - підвищити чутливість пристрою за рахунок установки датчика частоти обертів на валу відбору потужності (ВВП) та введенням в схему пристрою регулятора чутливості; - підвищити точність вимірів за рахунок того, що буксування рушіїв енергетичного засобу визначається з урахуванням переривань основної програми роботи мікропроцесора пристрою. Поставлена мета досягається тим, що пристрій для контролю буксування рушіїв енергетичного засобу містить шляховимірювальне колесо, датчики частоти обертів шляховимірювального колеса та валу відбору потужності (далі - ВВП), додатковий регулятор чутливості, який з'єднано з датчиком частоти обертів ВВП, перший блок формувача імпульсів, вхід якого з'єднано з виходом датчика частоти обертів шляховимірювального колеса, другий блок формувача імпульсів, вхід якого з'єднано з виходом додаткового регулятора чутливості, згідно корисної моделі, формувачі імпульсів, які містять підсилювачі та компаратори, приєднано до входів зовнішнього переривання мікропроцесора, який шиною даних та виходом ALE з'єднано з адресним регістром, шиною даних та шиною адреси з'єднано з програмнозапамятовуючим пристроєм (далі - ПЗП), двома виходами з'єднано з елементом ИЛИ-НЕ, вихід елемента ИЛИ-НЕ з'єднано з регістром коду символу, який в свою чергу, через шину даних з'єднано з мікропроцесором, мікропроцесор трьома виходами з'єднано з дешифратороммультиплексором та через інвертор з дев'ятим розрядом індикатора, виходи дешифраторамультиплексора з'єднано з катодами індикатора, виходи регістра коду символу через струмообмежувальні резистори з'єднано з анодами індикатора. Поставлена мета досягається також тим, що схема нуля через конденсатор з'єднана з нульовим виходом інвертора, а вихід схеми з'єднано з входом RST мікропроцесора. Технічна суть і принцип дії запропонованого пристрою для контролю буксування рушіїв енергетичного засобу пояснюється його структурною схемою, приведеною на кресленні. 4 Запропонований пристрій для контролю буксування рушіїв енергетичного засобу має шляховимірювальне колесо 1, датчики частоти обертів 2 та 3 шляховимірювального колеса 1 та валу відбору потужності 4, додатковий регулятор чутливості 5, з'єднаний з датчиком 3 частоти обертів ВВП, перший блок формувача імпульсів 6, вхід якого з'єднано з виходом датчика 2 шляховимірювального колеса 1, другий блок формувача імпульсів 7, входи якого з'єднано з виходами додаткового регулятора чутливості 5, блоки формувачів імпульсів, які містять підсилювачі 8 і 9 та компаратори 10 і 11, з'єднано з входами зовнішнього переривання INTO та INT1 мікропроцесора 12, який шиною даних В та виходом ALE з'єднано з адресним регістром 13, шиною даних В та шиною адреси А з'єднано з ПЗП 14, двома виходами WR та А15 з'єднано з елементом ИЛИ - НЕ 15, вихід елемента ИЛИ - НЕ з'єднано з регістром коду символу 16, який, в свою чергу, через шину даних В з'єднано з мікропроцесором, мікропроцесор трьома виходами з'єднано з дешифратором - мультиплексором 17 та через інвертор 18 з дев'ятим розрядом 19 індикатора 20, виходи дешифратора - мультиплексора з'єднано з катодами 21 індикатора, виходи регістру коду символу через струмообмежувальні резистори 22 з'єднано з анодами 23 індикатора. Схема нуля 24 через конденсатор 25 з'єднана з нульовим виходом інвертора 18, а вихід схеми з'єднано з входом RST мікропроцесора 12. Пристрій для контролю буксування рушіїв енергетичного засобу працює таким чином. Спочатку агрегат виконує холостий хід (з піднятими робочими органами), потім робочий хід. При виконанні робочого та холостого ходу, енергетичний засіб рухається як в прямому так і в зворотному напрямі. Це підвищує точність визначення буксування, оскільки враховує підйоми та нерівності залікової ділянки. Визначення буксування в запропонованому пристрої визначається по відомій формулі, в якій кутова швидкість ВВП відповідно при холостому і робочому ході та лінійна швидкість енергетичного засобу під час холостого і робочого ходу розраховуються за допомогою мікропроцесора 12. При русі агрегату імпульси від датчика 2 частоти обертів шляховимірювального колеса 1, яке проходить за один оберт шлях 1,8 м, надходять до блоку формувача імпульсів 6. Імпульси від датчика 3 частоти обертів ВВП 4 надходять до регулятора чутливості 5. Це необхідно для того, щоб не було враховано два імпульси по фронту та зрізу одного сигналу. Датчик 3 індукційного типу з металевим диском, який має 60 отворів. За один оберт він посилає 60 імпульсів. Якщо один оберт такого диску відбувається за одну секунду, то це означає 60 обертів за хвилину. Така конструкція датчика 3 спрощує розрахунок кутової швидкості ВВП 4 і за рахунок значної кількості імпульсів підвищується точність вимірів. Після регулятора чутливості 5 імпульси надходять до формувача імпульсів 7. Підсилювачі 8 та 9 формувачів імпульсів 6 та 7 підсилюють імпульси, а на виході компараторів 10 та 11 імпульси набувають прямокутної форми для 5 38949 того, щоб мікропроцесор 12 зміг ідентифікувати логічний нуль та логічну одиницю і, таким чином, вести підрахунок числа імпульсів. Імпульси надходять на входи зовнішнього переривання INTO, INT1 мікропроцесора 12. Для обробки цих імпульсів, організації переривань програми та організації динамічної індикації індикатора задіяні таймер-лічильники ТС1 та ТСО, які вбудовані на кристалі мікропроцесора 12. Таймер-лічильник ТСО використовується для організації переривань програми роботи мікропроцесора 12 та динамічного управління індикатором 20, а таймер-лічильник ТС1 налаштовується на підрахунок імпульсів від шляховимірювального колеса 1 та ВВП 4 по лініям INTO та INT1. Для організації переривань програми таймерлічильник ТСО підраховує вн утрішні машинні цикли мікропроцесора 12. При відповідному числі машинних циклів (FFFFH) наступає переповнення таймерлічильника ТСО, після чого він скидається в нуль, а мікропроцесор 12 по цьому вектору входить в процедуру переривання програми. Переривання програми відбувається через однакові проміжки часу. Ці переривання враховуються віртуальним таймером VTIMER, який встановлений в адресному просторі ПЗП мікропроцесора 12. Таким чином, віртуальним таймером VTIMER формується шкала часу з ціною поділки, яка дорівнює проміжку часу між двома перериваннями програми. В процедурі переривання основної програми відбувається активізація одного з розрядів індикатора 20, куди записується семисегментний код з регістра коду символу 16. Динамічне управління індикатором 20 забезпечується тим, що за одну секунду відбувається 500 переривань програми роботи мікропроцесора 12 та в випадку десятирозрядного індикатора п'ятдесят раз в секунду активізується кожен його розряд. Для підвищення точності вимірів таймерлічильником ТС1 підраховується тривалість кожного імпульсу, а віртуальним таймером - число переривань основної програми мікропроцесора 12, яке вкладається в тривалість кожного імпульсу. Для налаштування таймер-лічильника ТС1 на вимірювання тривалості проходження імпульсу вміст регістра управління таймером порівнюється з числом 10Н (00010000). Всі біти цього регістру встановлюються в нуль, а п'ятий біт встановлюється в 1 і відбувається налаштування таймерлічильника ТС1 на вимірювання тривалості проходження імпульсів від формувачів імпульсів 6 та 7. Імпульси, які виробляються формувачами імпульсів 6 та 7 надходять до лічильників імпульсів. Ці лічильники встановлюються програмне в оперативному просторі пам'яті даних. Дані по проміжкам часу з віртуального таймера VTIMER та по імпульсам з лічильників шляховимірювального колеса 1 та ВВП 4 надходять до мікропроцесора 12. Кожну секунду в арифметико-логічному пристрої мікропроцесора 12 визначається шлях, який 6 проходить енергетичний засіб, швидкість руху,буксування агрегату, та вивід цих даних на індикацію. Для програмної обробки імпульсів, мікропроцесор 12 по шині адреси В та адресний регістр 13 виставляють 16-ти розрядний адрес команди, яка знаходиться в ПЗП 14. Після передачі адреси адресним регістром 13, який виставляє молодші вісім розрядів по шині даних А, шина даних А переходить в високоімпедансний стан і по ній байт коду команди операції передається з ПЗП 14 до мікропроцесора 12. З мікропроцесора семисегментний код даних записується через елемент ИЛИ-НЕ 15 в регістр коду символу 16. Запис коду здійснюється по фронту сигналу при позитивній логіці елемента ИЛИНЕ. Для цього на елемент ИЛИ-НЕ з мікропроцесора 12 по виходу А 15 шини адреси подається нульовий потенціал, який стробується нульовим потенціалом сигналу WR. На виході елемента ИЛИ-НЕ формується логічна одиниця. Вона подається на регістр коду символу 16 і в цей момент з шини даних В мікропроцесора семи сегментний код записується в регістрі 16. З виходів регістра коду символу семи сегментний код даних через струмообмежувальні резистори 22 подається на аноди 23 однойменних сегментів індикатора. Коли мікропроцесор 12 входить в процедуру переривання по вектору від таймер-лічильника ТСО, то в цій процедурі активізується один з розрядів індикатора 20 для відображення даних. Порядковий номер розряду від 1 до 8 вибирається двійковим дешифратором-мультиплексором 17 трьома лініями від мікропроцесора 12. Якщо код сигналів з трьох виходів мікропроцесора становить 000, то вибирається перший розряд індикатора, якщо код становить 001, то вибирається другий і так далі. Дев'ятий розряд індикатора 20 вибирається мікропроцесором 12 напряму через інвертор 18. На виході інвертора формується логічний нуль, який подається на дев'ятий розряд 19 і, таким чином, активізує його. Десятий розряд індикатора 20 задається програмне. До нульового виходу інвертора 18 приєднана схема нуля 24 через конденсатор 25, вихід якої з'єднано з входом RST мікропроцесора. Нульовий потенціал з виходу інвертора 18 розряджає конденсатор 25 і на виході схеми нуля з'являється логічна одиниця. Якщо ж пропадає динамічна індикація, тобто на виході інвертора 18 з'являється логічна одиниця, то конденсатор 25 не розряджається і на виході схеми нуля 24 з'являється логічний нуль, який і скидає мікропроцесор 12. Після обнуління мікропроцесор 12 починає виконувати програму, записану в ПЗП 14. На початку цієї програми очищується вбудована на кристалі пам'ять даних, вказівник стека встановлюється в відведену для нього область пам'яті даних, порти входів-ви ходів встановлюються в 1 і виконується команда дозволу переривань від таймерлічильника ТСО. Подальші дії аналогічні тим, які були описані вище. 7 38949 На відміну від аналогу, в якому буксування рушіїв транспортного засобу визначається апаратним способом, тобто результат на виході одержується проходженням імпульсів через велику кількість мікросхем, в запропонованому пристрої значно підвищується чутливість і точність вимірів. Розрахунок буксування рушіїв енергетичного засобу здійснюється з використанням переривань програми роботи мікропроцесора. Це дає можливість розраховува ти швидкість руху з використанням точної шкали часу, яка формується віртуальним таймером. Коливання швидкості руху енергетичного засобу з причіпною чи навісною машиною при виконанні технологічного процесу точно відслідковує коливання тягового опору в залежності від щільності ґрунту та нахилів профілю залікової ділянки. В залежності від цього відбувається і коливання коефіцієнта буксування. Аналог не може враховувати це, оскільки не має оперативного запам'ятовуючого пристрою, в якому зберігаються проміжні дані по швидкостям руху та частотам обертів ВВП. За рахунок того, що пристрій для контролю за буксуванням рушіїв енергетичного засобу забез Комп’ютерна в ерстка М. Ломалова 8 печено датчиками частот обертів шляховимірювального колеса та ВВП, додатковим регулятором чутливості, блоками формувачів імпульсів, мікропроцесором з адресним регістром та ПЗП, регістром коду символу та дешифратороммультиплексором, індикатором, інвертором, елементом ИЛИ-НЕ, схемою нуля, відбувається розрахунок буксування та вивід на індикатор кожну секунду поточного значення коефіцієнта буксування і, таким чином, здійснюється контроль за ним. При виконанні технологічного процесу, агрегат рухається на певній передачі енергетичного засобу при повній подачі палива. Цікавість викликає контроль за регламентованою величиною буксування, а не зменшення його за рахунок зменшення швидкості як у аналога, бо при цьому зменшується продуктивність агрегату в цілому. Таким чином запропонований пристрій для контролю буксування рушіїв енергетичного засобу виключає недоліки аналога та дозволяє запобігати неправильному агрегатуванню енергетичного засобу з причіпною чи навісною машиною і зменшувати питомі витрати палива при виконанні технологічного процесу. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSlip controller for movers of power unit
Автори англійськоюKucherenko Volodymyr Hryhorovych, Mytrofanov Oleksandr Petrovych, Bondarev Yevhen Illich, Lehkodukh Natalia Fedorivna
Назва патенту російськоюУстройство для контроля буксовки движителей энергетического средства
Автори російськоюКучеренко Владимир Григорьевич, Митрофанов Александр Петрович, Бондарев Евгений Ильич, Легкодух Наталья Федоровна
МПК / Мітки
МПК: F02D 28/00, F01C 21/00
Мітки: контролю, рушіїв, енергетичного, пристрій, буксування, засобу
Код посилання
<a href="https://ua.patents.su/4-38949-pristrijj-dlya-kontrolyu-buksuvannya-rushiv-energetichnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для контролю буксування рушіїв енергетичного засобу</a>
Пристрій для виявлення буксування чи юза колісних пар транспортного засобу
Номер патенту: 8782
Опубліковано: 15.08.2005
Автор: Шапран Євген Миколайович
МПК: G01P 15/16, B60L 3/10
Мітки: юза, засобу, виявлення, пар, транспортного, колісних, пристрій, буксування
Формула / Реферат:
Пристрій для виявлення буксування чи юза колісних пар транспортного засобу, що має для всіх ведучих колісних пар блоки розрахунку динамічного зусилля, кожен з яких містить датчик частоти обертання тягового двигуна, з'єднаний з одним із входів додаткового суматора, інший вхід якого підключений до виходу інтегратора, датчик струму якоря тягового двигуна, вихід якого з'єднаний з одним із входів блока множення, інший вхід якого через блок...
Зчіпний пристрій енергетичного засобу
Номер патенту: 11955
Опубліковано: 16.01.2006
Автори: Кюрчев Володимир Миколайович, Чорна Тетяна Сергіївна, Надикто Володимир Трохимович
МПК: A01B 59/00
Мітки: зчіпний, пристрій, засобу, енергетичного
Формула / Реферат:
Зчіпний пристрій енергетичного засобу, який містить автоматичну зчіпку з рамкою, що шарнірно з'єднана з провушинами, який відрізняється тим, що провушини виконані у вигляді гайок, які контактують з додатково встановленим гвинтом, привідний механізм якого через аналізуючий блок електрично зв'язаний з датчиком кута повороту керованих коліс енергетичного засобу.
Пристрій для автоматичного контролю буксування валків вальцівного стана
Номер патенту: 30537
Опубліковано: 25.02.2008
Автор: Буряковський Сергій Геннадійович
МПК: B21B 38/00, B21B 37/00
Мітки: контролю, пристрій, автоматичного, стана, вальцівного, буксування, валків
Формула / Реферат:
Пристрій для автоматичного контролю буксування валків вальцівного стана, що містить блок визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження й блок визначення моменту виникнення буксування валків по частоті коливань струму навантаження, який відрізняється тим, що він оснащений блоком визначення режиму прокатки, що включає датчик напруги, компаратор, диференціатор напруги й граничний елемент із...
Зчіпний пристрій енергетичного засобу
Номер патенту: 30201
Опубліковано: 15.11.2000
Автори: Абдула Сергій Леонідович, Санін Генадій Анатольович, Рославцев Анатолій Васільєвіч, Надикто Володимир Трохимович
МПК: A01B 59/00
Мітки: пристрій, засобу, енергетичного, зчіпний
Формула / Реферат:
Зчіпний пристрій енергетичного засобу, який включає нижні тяги заднього начіпного механізму трактора та рамку автозчіпки, відрізняється тим, що пристрій обладнаний додатковим брусом з чотирма провушинами, дві з яких шарнірно з'єднані з нижніми тягами заднього начіпного механізму трактора, а дві - з рамкою автозчіпки таким чином, що остання є зміщеною в поперечному напрямку відносно поздовжньої вісі симетрії трактора на задану величину.
Спосіб переміщення енергетичного засобу “vertep”
Номер патенту: 7046
Опубліковано: 15.06.2005
Автори: Яковенко Анатолій Миколайович, Сєнік Володимир Борисович, Петров Леонід Миколайович
МПК: B62D 61/00
Мітки: спосіб, енергетичного, переміщення, vertep, засобу
Формула / Реферат:
Спосіб переміщення енергетичного засобу шляхом підведення до колісного рушія крутного моменту, який відрізняється тим, що крутний момент зрівнюють по фазах обертання ведучого колеса та вільного колеса і в момент нерівностей частот обертання цих коліс збільшують навантаження на вільне колесо.
Попередній патент: Препарат комплексний пробіотично-сорбційний для лікування гнійних ран у котів “ділаксил”
Наступний патент: Фільтрувальний пристрій для доочищення питної води
Випадковий патент: Спосіб визначення життєздатності сегментів міокарда лівого щлуночка у пацієнтів із ішемічною кардіоміопатією