Пристрій для виявлення буксування чи юза колісних пар транспортного засобу
Формула / Реферат
Пристрій для виявлення буксування чи юза колісних пар транспортного засобу, що має для всіх ведучих колісних пар блоки розрахунку динамічного зусилля, кожен з яких містить датчик частоти обертання тягового двигуна, з'єднаний з одним із входів додаткового суматора, інший вхід якого підключений до виходу інтегратора, датчик струму якоря тягового двигуна, вихід якого з'єднаний з одним із входів блока множення, інший вхід якого через блок розрахунку магнітного потоку з'єднаний з виходом датчика струму збудження тягового двигуна, суматор, перший вхід якого підключений через перший пропорційний підсилювач до виходу блока множення, а другий вхід підключений через другий пропорційний підсилювач до виходу додаткового суматора, а також блок порівняння, один вхід якого з'єднаний з виходом блока задання граничного прискорення колісної пари, а інші входи підключені до виходу суматора і входу інтегратора в кожному блоці розрахунку динамічного зусилля, який відрізняється тим, що він забезпечений блоком розрахунку сили зчеплення колісної пари, один вхід якого підключений до виходу датчика осьового навантаження, а вихід - до третього входу суматора, блоком розрахунку лінійної швидкості, входи якого підключені до виходу кожного датчика частоти обертання тягового двигуна, а вихід - до другого входу кожного блока розрахунку сили зчеплення колісної пари в усіх блоках розрахунку динамічного зусилля, блоком розрахунку сили опору руху, один вхід якого підключений до виходу блока розрахунку лінійної швидкості, а другий вхід - до виходу блока програмного задання маси потягу та профілю руху, блоком розрахунку динамічного зусилля від лінійного прискорення колісної пари, вихід якого підключений до четвертого входу кожного суматора, а входи - до кожного виходу пропорційного підсилювача в усіх блоках розрахунку динамічного зусилля та виходу блока розрахунку сили опору руху.
Текст
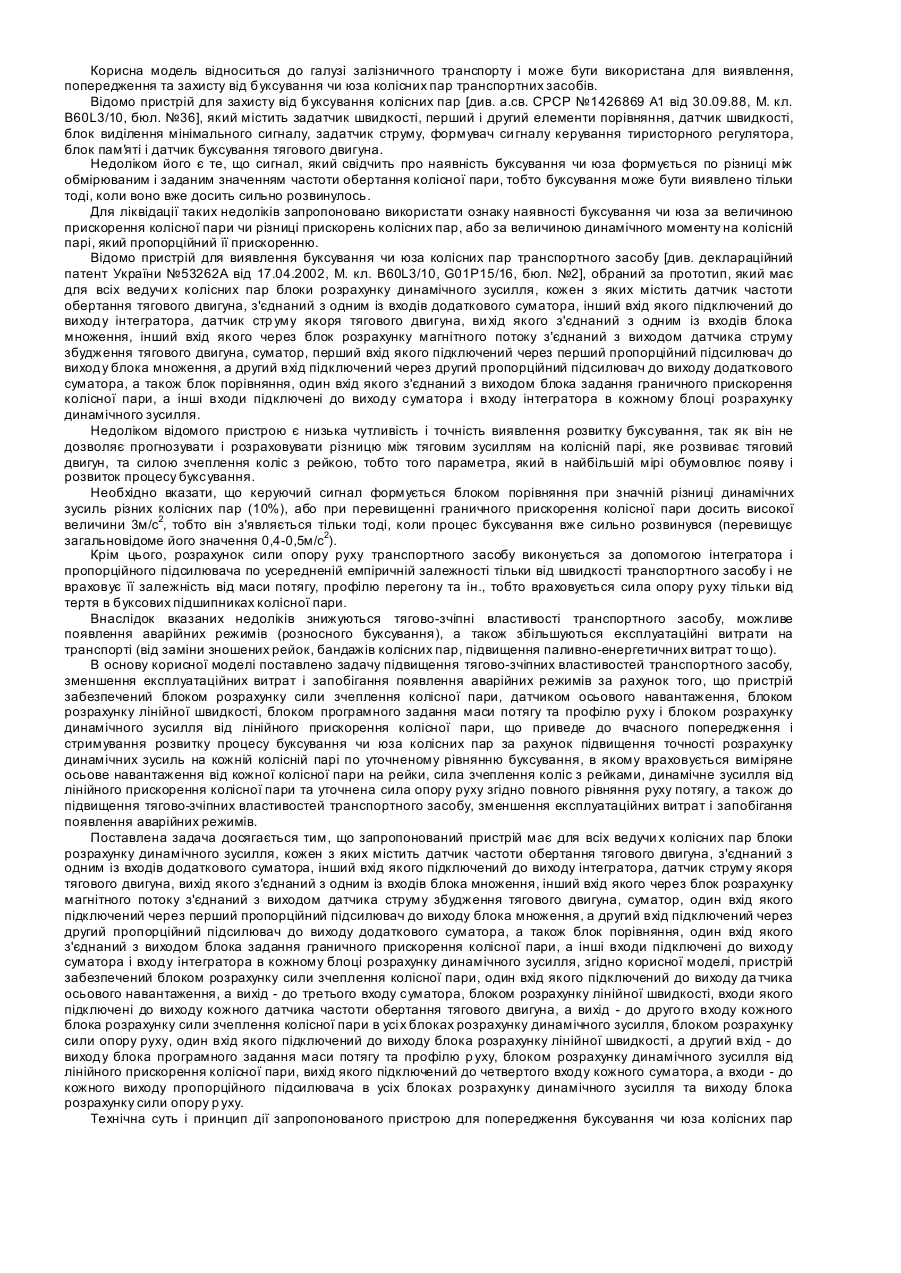
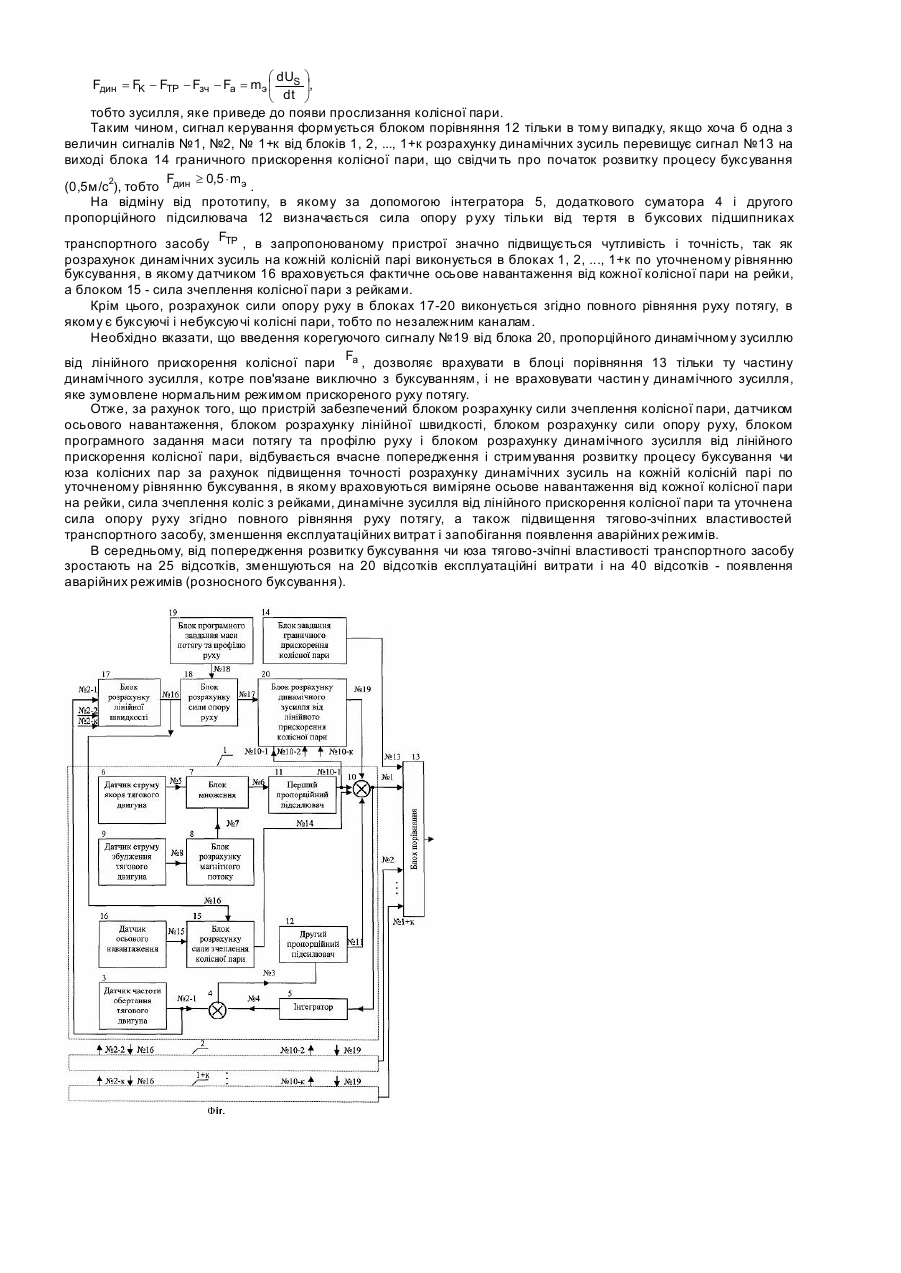
Корисна модель відноситься до галузі залізничного транспорту і може бути використана для виявлення, попередження та захисту від буксування чи юза колісних пар транспортних засобів. Відомо пристрій для захисту від буксування колісних пар [див. а.св. СРСР №1426869 А1 від 30.09.88, М. кл. В60L3/10, бюл. №36], який містить задатчик швидкості, перший і другий елементи порівняння, датчик швидкості, блок виділення мінімального сигналу, задатчик струму, формувач си гналу керування тиристорного регулятора, блок пам'яті і датчик буксування тягового двигуна. Недоліком його є те, що сигнал, який свідчить про наявність буксування чи юза формується по різниці між обмірюваним і заданим значенням частоти обертання колісної пари, тобто буксування може бути виявлено тільки тоді, коли воно вже досить сильно розвинулось. Для ліквідації таких недоліків запропоновано використати ознаку наявності буксування чи юза за величиною прискорення колісної пари чи різниці прискорень колісних пар, або за величиною динамічного моменту на колісній парі, який пропорційний її прискоренню. Відомо пристрій для виявлення буксування чи юза колісних пар транспортного засобу [див. деклараційний патент України №53262А від 17.04.2002, М. кл. В60L3/10, G01P15/16, бюл. №2], обраний за прототип, який має для всіх ведучи х колісних пар блоки розрахунку динамічного зусилля, кожен з яких містить датчик частоти обертання тягового двигуна, з'єднаний з одним із входів додаткового суматора, інший вхід якого підключений до виходу інтегратора, датчик стр уму якоря тягового двигуна, ви хід якого з'єднаний з одним із входів блока множення, інший вхід якого через блок розрахунку магнітного потоку з'єднаний з виходом датчика струму збудження тягового двигуна, суматор, перший вхід якого підключений через перший пропорційний підсилювач до виходу блока множення, а другий вхід підключений через другий пропорційний підсилювач до виходу додаткового суматора, а також блок порівняння, один вхід якого з'єднаний з виходом блока задання граничного прискорення колісної пари, а інші входи підключені до виходу суматора і входу інтегратора в кожному блоці розрахунку динамічного зусилля. Недоліком відомого пристрою є низька чутливість і точність виявлення розвитку буксування, так як він не дозволяє прогнозувати і розраховувати різницю між тяговим зусиллям на колісній парі, яке розвиває тяговий двигун, та силою зчеплення коліс з рейкою, тобто того параметра, який в найбільшій мірі обумовлює появу і розвиток процесу буксування. Необхідно вказати, що керуючий сигнал формується блоком порівняння при значній різниці динамічних зусиль різних колісних пар (10%), або при перевищенні граничного прискорення колісної пари досить високої величини 3м/с2, тобто він з'являється тільки тоді, коли процес буксування вже сильно розвинувся (перевищує загальновідоме його значення 0,4-0,5м/с2). Крім цього, розрахунок сили опору руху транспортного засобу виконується за допомогою інтегратора і пропорційного підсилювача по усередненій емпіричній залежності тільки від швидкості транспортного засобу і не враховує її залежність від маси потягу, профілю перегону та ін., тобто враховується сила опору руху тільки від тертя в буксових підшипниках колісної пари. Внаслідок вказаних недоліків знижуються тягово-зчіпні властивості транспортного засобу, можливе появлення аварійних режимів (розносного буксування), а також збільшуються експлуатаційні витрати на транспорті (від заміни зношених рейок, бандажів колісних пар, підвищення паливно-енергетичних витрат то що). В основу корисної моделі поставлено задачу підвищення тягово-зчіпних властивостей транспортного засобу, зменшення експлуатаційних витрат і запобігання появлення аварійних режимів за рахунок того, що пристрій забезпечений блоком розрахунку сили зчеплення колісної пари, датчиком осьового навантаження, блоком розрахунку лінійної швидкості, блоком програмного задання маси потягу та профілю руху і блоком розрахунку динамічного зусилля від лінійного прискорення колісної пари, що приведе до вчасного попередження і стримування розвитку процесу буксування чи юза колісних пар за рахунок підвищення точності розрахунку динамічних зусиль на кожній колісній парі по уточненому рівнянню буксування, в якому враховується виміряне осьове навантаження від кожної колісної пари на рейки, сила зчеплення коліс з рейками, динамічне зусилля від лінійного прискорення колісної пари та уточнена сила опору руху згідно повного рівняння руху потягу, а також до підвищення тягово-зчіпних властивостей транспортного засобу, зменшення експлуатаційних витрат і запобігання появлення аварійних режимів. Поставлена задача досягається тим, що запропонований пристрій має для всіх ведучи х колісних пар блоки розрахунку динамічного зусилля, кожен з яких містить датчик частоти обертання тягового двигуна, з'єднаний з одним із входів додаткового суматора, інший вхід якого підключений до виходу інтегратора, датчик струму якоря тягового двигуна, вихід якого з'єднаний з одним із входів блока множення, інший вхід якого через блок розрахунку магнітного потоку з'єднаний з виходом датчика струму збудження тягового двигуна, суматор, один вхід якого підключений через перший пропорційний підсилювач до виходу блока множення, а другий вхід підключений через другий пропорційний підсилювач до виходу додаткового суматора, а також блок порівняння, один вхід якого з'єднаний з виходом блока задання граничного прискорення колісної пари, а інші входи підключені до виходу суматора і входу інтегратора в кожному блоці розрахунку динамічного зусилля, згідно корисної моделі, пристрій забезпечений блоком розрахунку сили зчеплення колісної пари, один вхід якого підключений до виходу да тчика осьового навантаження, а вихід - до третього входу суматора, блоком розрахунку лінійної швидкості, входи якого підключені до виходу кожного датчика частоти обертання тягового двигуна, а вихід - до друго го входу кожного блока розрахунку сили зчеплення колісної пари в усі х блоках розрахунку динамічного зусилля, блоком розрахунку сили опору руху, один вхід якого підключений до виходу блока розрахунку лінійної швидкості, а другий вхід - до виходу блока програмного задання маси потягу та профілю р уху, блоком розрахунку динамічного зусилля від лінійного прискорення колісної пари, вихід якого підключений до четвертого входу кожного суматора, а входи - до кожного виходу пропорційного підсилювача в усіх блоках розрахунку динамічного зусилля та виходу блока розрахунку сили опору р уху. Технічна суть і принцип дії запропонованого пристрою для попередження буксування чи юза колісних пар транспортного засобу пояснюється його структурною схемою, приведеною на кресленні (Фіг.). Запропонований пристрій (див. Фіг.) має для всіх ведучи х колісних пар блоки 1,2,..., 1+к розрахунку динамічного зусилля, кожен з яких містить датчик 3 частоти обертання тягового двигуна, з'єднаний з одним із входів додаткового суматора 4, інший вхід якого підключений до виходу інтегратора 5, датчик 6 струм у якоря тягового двигуна, ви хід якого з'єднаний з одним із входів блока множення 7, інший вхід якого через блок 8 розрахунку магнітного потоку з'єднаний з виходом датчика 9 струму збудження тягового двигуна. Крім цього один вхід суматора 10 підключений через перший пропорційний підсилювач 11 до виходу блока множення 7, а другий вхід через другий пропорційний підсилювач 12 підключений до виходу додаткового суматора 4. Один вхід блока порівняння 13 з'єднаний з виходом блока 14 задання граничного прискорення колісної пари, а інші входи підключені до виходу суматора 10 і входу інтегратора 5 в кожному блоці розрахунку динамічного зусилля 1, 2, ..., 1+к. Блок 15 розрахунку сили зчеплення колісної пари одним входом підключений до виходу датчика 16 осьового навантаження, другим входом - до виходу блока 17 розрахунку лінійної швидкості, а виходом - до третього входу суматора 10. Входи блока 17 розрахунку лінійної швидкості підключені до виходів кожного датчика 3 частоти обертання тягового двигуна блоків 1, 2, ..., 1+к розрахунку динамічного зусилля. Блок 18 розрахунку сили опору руху одним входом підключений до виходу блока 17 розрахунку лінійної швидкості, другим входом - до ви ходу блока 19 програмного задання маси потягу та профілю руху. Блок 20 розрахунку динамічного зусилля від лінійного прискорення колісної пари одним входом підключений до виходу блока 18 розрахунку сили опору руху, а іншими входами - до кожного виходу першого пропорційного підсилювача 11 в усіх блоках розрахунку динамічного зусилля 1, 2, ..., 1+к. Описаний пристрій може бути реалізований як на аналогових операційних підсилювачах (мікросхемах), так і у вигляді частини керуючої програми, занесеної до мікропроцесора, котрий через електронні блоки з'єднаний з системами транспортного засобу. При цьому прикладне програмне забезпечення (алгоритми керування та розрахунки) можуть бути розроблені за допомогою відомих систем програмування (MATLAB, UltraLogic та інш.). Запропонований пристрій працює таким чином. Віддатчика 9 струму збуджування тягового двигуна на вхід блока 8 розрахунку магнітного потоку надходить сигнал №8, пропорційний обмірюваному значенню струму збудження. Блок 8 має передатну характеристику, що збігається з характеристикою намагнічування відповідного тягового двигуна, тому на його виході формується сигнал №7, пропорційний магнітному потоку F двигуна. Цей сигнал надходить на вхід блока множення 7, на інший вхід якого подається сигнал №5 від датчика 6 струму якоря цього ж тягового двигуна. Таким чином, вихідний сигнал №6 блока множення 7 пропорційний величині добутку магнітного потоку на стр ум якоря ( F ×I я ). Так як тягове зусилля на колісній парі, що розвивається тяговим двигуном, FK обчислюється за формулою: FK = æ 2× m ö 2× m × h3 × MДВ = ç ç D × h3 ÷ × CM × F × Iя, ÷ Dk è k ø де m - передатне відношення зубчастої передачі; D - діаметр колеса, м; h3 - коефіцієнт корисної дії зубчастої передачі; MДВ - момент, що розвивається тяговим двигуном, Н×м; C - постійна тягового двигуна; F - магнітний потік, Вб; Iя - струм якоря тягового двигуна, А, то, вважаючи h3 постійним і підібравши коефіцієнт підсилення першого пропорційного підсилювача 11 рівним: 2 ×m K1 = × h3 × CM, Dk можна стверджувати, що ви хідна величина сигналу першого пропорційного підсилювача 11 пропорційна тяговому зусиллю на колісній парі FK . Оскільки буксування колісної пари перш за все обумовлене появою різниці між тяговим зусиллям FK та силою зчеплення колісної пари з рейками Fзч , то суматором 10 розв'язується загальновідоме рівняння буксування колісної пари: dUS FK - Fзч - FTP - Fa = mэ , dt де mэ - еквівалентна маса тягового двигуна і колісної пари, кг; dUS dt - прискорення прослизання колісної пари відносно рейок при буксуванні; dUS Fдин = mэ × dt - динамічне зусилля на колісній парі, Н; Fзч = PS × YS - сила зчеплення колісної пари з рейками, Н; Fa = mэ × a - динамічне зусилля від лінійного прискорення колісної пари, Н. PS - вертикальне осьове навантаження від колісної пари на рейки, Н; YS - коефіцієнт зчеплення колісної пари з рейками; a - лінійне прискорення колісної пари (транспортного засобу), м/с2; FTP = PO × KTP × Wk - сила опору руху від тертя в буксових підшипниках, Н; KTP - емпіричний коефіцієнт тертя в буксових підшипниках; PO - номінальне осьове навантаження колісної пари, Н; Wk - частота обертання колісної пари, рад/с. F Тобто, в кожному блоці 1, 2, ..., 1+к суматором 10 розраховуються динамічні зусилля на колісних парах дин (сигнали №1, №2, ..., №1+к) шляхом вирахування з вихідного сигналу першого пропорційного підсилювача 11, який пропорційний тяговому зусиллю на колісній парі FK , сигналів з виходів блока 15, другого пропорційного підсилювача 12 і блока 20, котрі відповідно пропорційні силі зчеплення колісної пари з рейками Fзч (сигнал №14), силі опору руху від тертя в буксових підшипниках FTP (сигнал №11) і динамічному зусиллю від лінійного прискорення колісної пари Fa (сигнал №19) згідно рівняння: Fдин = FK - Fзч - Fa - FTP . Необхідно вказати, що від датчика 16 осьового навантаження на один вхід блока 15 розрахунку сили зчеплення надходить сигнал №15, пропорційний фактичному значенню вертикального осьового навантаження від колісної пари на рейки PS , а на другий вхід - розраховане усереднене значення лінійної швидкості руху транспортного засобу від блока 17 (сигнал №16) згідно формули: k å (w + ... + w ) 1 V= k 1 K × Dk , 2m де w1 ¸ wk - обмірювані величини сигналів №2-1, №2-2, ..., №2-к від датчиків 3 частоти обертання тягових двигунів (по кількості K ведучи х колісних пар), рад/с; V - лінійна швидкість колісної пари (всього транспортного засобу), м/с. Вихідний сигнал №14 блока 15 розрахунку сили зчеплення колісної пари обчислюється за такою формулою: Fзч = PS × YSн де YSн - нормований коефіцієнт зчеплення колісних пар. При цьому, в залежності від типу транспортного засобу, YSн обчислюється за різними формулами. Так, наприклад, для тепловозів він приймається рівним: 3 YSн = 0,25 + , 100 + 20 V а для електровозів: 3 YSн = 0,28 + - 0,0007V, 50 + 20 V де V - лінійна швидкість транспортного засобу, км/год. Крім цього, він може корегуватися в залежності від профілю руху (прямолінійний чи криволінійний відрізок путі). Визначення динамічного зусилля Fa від лінійного прискорення колісної пари (сигнал №19) проводиться в блоці 20 шляхом розв'язання рівняння руху потягу. Для цього на виході блока 19 програмного задання маси потягу та профілю руху задаються конкретні маси локомотива mл та вагонів з вантажем mв , а також профіль руху по перегону (лінійні ділянки, величини підйомів чи спусків, радіуси криволінійних ділянок) в залежності від пройденого шляху Sn . Ця інформація подається на вхід блока 18, в якому розраховується сила опору руху (сигнал №17) згідно рівняння: Fc = Wo + i + Wкр × (m л + mв ) × g ( ) де Wo - питомий основний опір руху потягу (локомотива і вагонів); i - додатковий питомий опір руху потягу на Wкр підйомах; - додатковий питомий опір руху на криволінійних ділянках шляху; mл - маса локомотива; mв маса вагонів; g =9,8м/с2 - прискорення вільного падіння. Необхідно вказати, що питомий основний опір руху потягу розраховується за відомими формулами в залежності від типу локомотива і вагонів, а також швидкості V руху потягу по формулі: Wo = в + cV + dV2 де в , c і d - постійні коефіцієнти. Сигнал №17, пропорційний силі опору руху Fc , подається на вхід блока 20 розрахунку динамічного зусилля від лінійного прискорення колісної пари. В блоці 20 розв'язується рівняння руху потягу в такому вигляді: k m ×a = åF i K - Fc i=1 1+ g , i K де m = mл + mв - маса потягу; g - коефіцієнт, який враховує масу елементів потягу, котрі обертаються; F тягові зусилля кожного тягового двигуна, пропорційні величині сигналів №10-1, №10-2, ..., №10-к, отриманих на k виході пропорційних підсилювачів 10; åF i K = FK i=1 - сумарне тягове зусилля локомотива. Отже, на виході блока 20 обчислюється сигнал №19, пропорційний зусиллю Fa , за такою залежністю: k Fa = mэ × a = åF i=1 i K - Fc (1 + g ) × m × mэ , Потім сигнали розрахованих динамічних зусиль для кожної ведучої колісної пари, які формуються на виході суматора 10 кожного блока 1, 2, ..., 1+к згідно рівняння: Fдин = FK - Fзч - FTP - Fa , подаються на входи інтегратора 5 і блока порівняння 13. При цьому на виході інтегратора 5 обчислюється сигнал №4, пропорційний зміні частоти обертання тягового двигуна при буксуванні чи юзі колісної пари за такою залежністю: DK DW = F dt, 2mh3 J дин де J - сума моментів інерції тягового двигуна і колісної пари, приведених до осі колісної пари, кгм 2. Тобто при розрахунках D W маса потягу не враховується в моменті інерції J , так як колісна пара прослизає на рейках. Отже додатковий суматор 4 підсумовує сигнал з виходу датчика 3, пропорційний обмірюваній частоті обертання тягового двигуна Wi , та сигнал з ви ходу інтегратора 5, який пропорційний зміні частоти обертання ò тягового двигуна D W при буксуванні чи юзі згідно рівняння: W = Wi ± DW , причому сигнал D W буде додатним при буксуванні колісної пари, а мінусовим - при юзі. Потім вихідний сигнал №3 додаткового суматора 4, який дорівнює розрахованій частоті обертання тягового двигуна W , надходить на вхід другого пропорційного підсилювача 12, коефіцієнт підсилення якого приймається рівним: 2m K 2 = PO ×K . DK TP Тобто, можна стверджувати, що ви хідна величина сигналу №11 другого пропорційного підсилювача 12 пропорційна силі опору руху від тертя в буксових підшипниках колісної пари: 2m FTP = PO × K (W ± D W ). DK TP i Отже, при русі локомотива безупинно вимірюється дійсне вертикальне навантаження від кожної колісної пари на рейки датчиком 16, яке випадково залежить від багатьох факторів (коливань кузова, перерозподілу вертикальних зусиль від сили тяги та інш.), розраховується в блоці 15 найбільш імовірна сила зчеплення колісної пари з рейками Fзч , в блоці 20 - динамічне зусилля від лінійного прискорення колісної пари Fa , а на виході другого пропорційного підсилювача 12 - сила опору руху від тертя в буксових підшипниках FTP , котрі порівнюються в суматорі 10 з фактичним тяговим зусиллям на колісній парі FK , яке розраховується на виході першого пропорційного підсилювача 11. При цьому, для ефективного отримання ще не розвиненого процесу буксування наперед прогнозується поява сигналу динамічного зусилля на виході суматора 10 кожного блока 1,2, ..., 1+к розрахунку динамічних зусиль, згідно рівняння: æ dU ö Fдин = FK - FTP - Fзч - Fa = mэ ç S ÷, è dt ø тобто зусилля, яке приведе до появи прослизання колісної пари. Таким чином, сигнал керування формується блоком порівняння 12 тільки в тому випадку, якщо хоча б одна з величин сигналів №1, №2, № 1+к від блоків 1, 2, ..., 1+к розрахунку динамічних зусиль перевищує сигнал №13 на виході блока 14 граничного прискорення колісної пари, що свідчи ть про початок розвитку процесу буксування F ³ 0,5 × mэ (0,5м/с2), тобто дин . На відміну від прототипу, в якому за допомогою інтегратора 5, додаткового суматора 4 і другого пропорційного підсилювача 12 визначається сила опору р уху тільки від тертя в буксових підшипниках транспортного засобу FTP , в запропонованому пристрої значно підвищується чутливість і точність, так як розрахунок динамічних зусиль на кожній колісній парі виконується в блоках 1, 2, ..., 1+к по уточненому рівнянню буксування, в якому датчиком 16 враховується фактичне осьове навантаження від кожної колісної пари на рейки, а блоком 15 - сила зчеплення колісної пари з рейками. Крім цього, розрахунок сили опору руху в блоках 17-20 виконується згідно повного рівняння руху потягу, в якому є буксуючі і небуксуючі колісні пари, тобто по незалежним каналам. Необхідно вказати, що введення корегуючого сигналу №19 від блока 20, пропорційного динамічному зусиллю від лінійного прискорення колісної пари Fa , дозволяє врахувати в блоці порівняння 13 тільки ту частину динамічного зусилля, котре пов'язане виключно з буксуванням, і не враховувати частин у динамічного зусилля, яке зумовлене нормальним режимом прискореного руху потягу. Отже, за рахунок того, що пристрій забезпечений блоком розрахунку сили зчеплення колісної пари, датчиком осьового навантаження, блоком розрахунку лінійної швидкості, блоком розрахунку сили опору руху, блоком програмного задання маси потягу та профілю руху і блоком розрахунку динамічного зусилля від лінійного прискорення колісної пари, відбувається вчасне попередження і стримування розвитку процесу буксування чи юза колісних пар за рахунок підвищення точності розрахунку динамічних зусиль на кожній колісній парі по уточненому рівнянню буксування, в якому враховуються виміряне осьове навантаження від кожної колісної пари на рейки, сила зчеплення коліс з рейками, динамічне зусилля від лінійного прискорення колісної пари та уточнена сила опору руху згідно повного рівняння руху потягу, а також підвищення тягово-зчіпних властивостей транспортного засобу, зменшення експлуатаційних витрат і запобігання появлення аварійних режимів. В середньому, від попередження розвитку буксування чи юза тягово-зчіпні властивості транспортного засобу зростають на 25 відсотків, зменшуються на 20 відсотків експлуатаційні витрати і на 40 відсотків - появлення аварійних режимів (розносного буксування).
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for identification of slippage (skid) of wheel pairs of a vehicle
Назва патенту російськоюУстройство для выявления буксования или юза колесных пар транспортного средства
МПК / Мітки
МПК: B60L 3/10, G01P 15/16
Мітки: юза, колісних, пристрій, пар, виявлення, буксування, засобу, транспортного
Код посилання
<a href="https://ua.patents.su/5-8782-pristrijj-dlya-viyavlennya-buksuvannya-chi-yuza-kolisnikh-par-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для виявлення буксування чи юза колісних пар транспортного засобу</a>
Пристрій виявлення буксування та юзу коліс рейкового транспортного засобу
Номер патенту: 19743
Опубліковано: 25.12.1997
Автори: Павленко Антон Альбертович, Кутовий Юрій Миколайович, Клепіков Володимир Борисович, Павленко Альберт Прокопович
МПК: B60L 3/10
Мітки: засобу, виявлення, юзу, пристрій, буксування, рейкового, транспортного, коліс
Формула / Реферат:
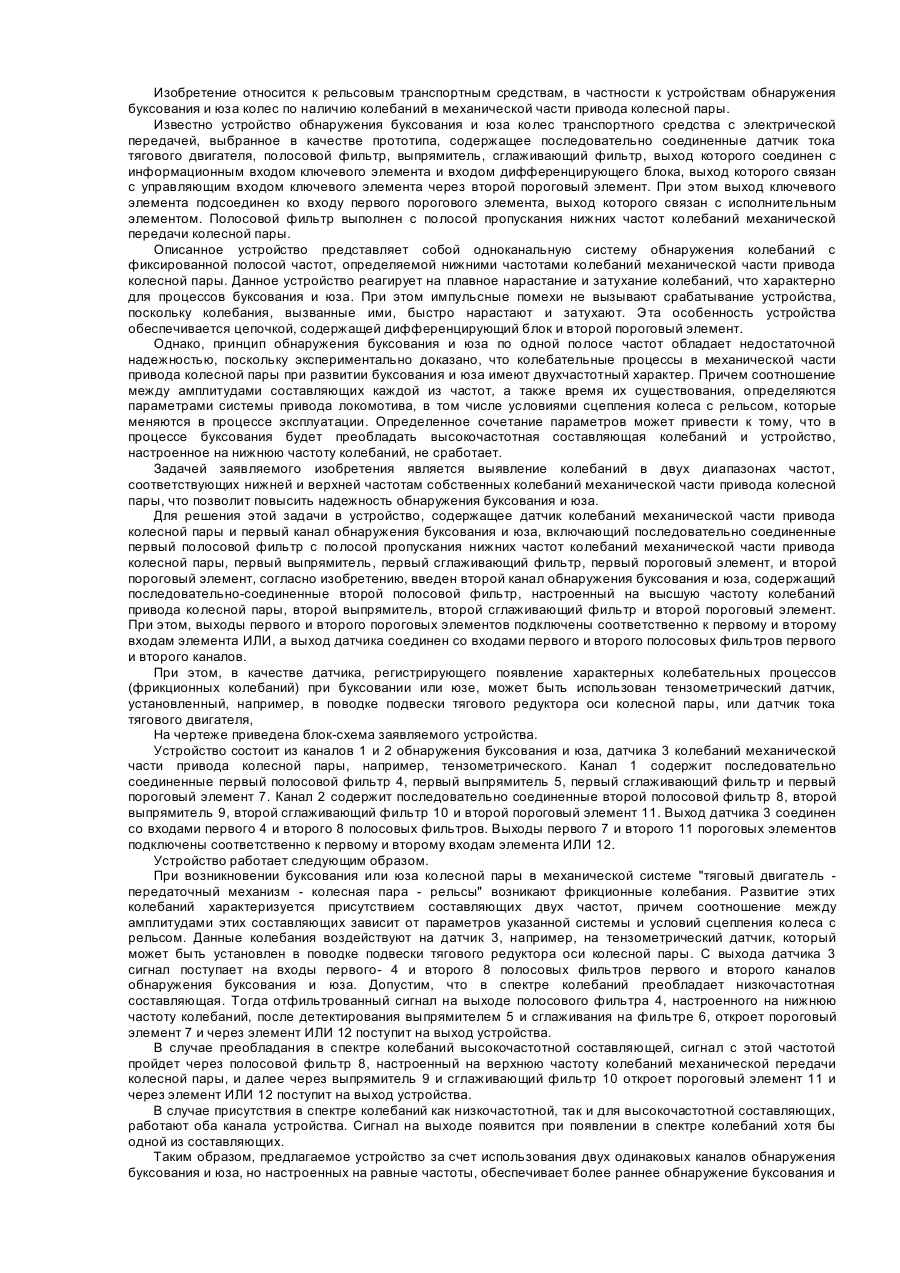
1. Устройство обнаружения буксования и юза колес рельсового транспортного средства, содержащее датчик колебаний механической части привода колесной пары и первый канал обнаружения буксования и юза, включающий последовательно соединенные первый полосовой фильтр с полоской пропускания нижних частот колебаний механической части привода колесной пары, первый выпрямитель, первый сглаживающий фильтр, первый пороговый элемент, и второй пороговый...
Пристрій для змащування гребенів колісних пар рейкового транспортного засобу

Номер патенту: 67211
Опубліковано: 15.06.2004
Автори: Вівденко Юрій Григорійович, Бєлозьоров Євген Володимирович, Голубенко Олександр Леонідович, Спірягін Максим Ігоревич, Бєлозьорова Вікторія Володимирівна
МПК: B61K 3/00
Мітки: пристрій, рейкового, змащування, колісних, пар, гребенів, транспортного, засобу
Формула / Реферат:
Пристрій для змащування гребенів колісних пар рейкового транспортного засобу, який містить резервуар з мастилом, масляний трубопровід, змащувальний елемент та запірно-регулюючий механізм, який відрізняється тим, що як резервуар з мастилом застосовано резервуар, розташований на осі колісної пари з можливістю створення відцентрової сили під час руху транспортного засобу для витиску рідкого мастила, як запірно-регулюючий механізм для мастила...
Пристрій для нанесення мастила на гребені колісних пар залізничного транспортного засобу
Номер патенту: 67225
Опубліковано: 15.06.2004
Автори: Могила Валентин Іванович, Кашура Олександр Леонідович, Попов Сергій Валерійович, Мельников Микола Петрович, Гундарь Володимир Петрович, Горбунов Микола Іванович, Басов Генадій Григорійович, Найш Наум Михайлович
МПК: B61K 3/00
Мітки: мастила, засобу, пар, колісних, нанесення, пристрій, залізничного, транспортного, гребені
Формула / Реферат:
Пристрій для нанесення мастила на гребені колісних пар залізничного транспортного засобу, що містить резервуар для мастила, мастилопроводи, форсунки, повітропровід, очисник повітря, електропневматичний вентиль, додатковий повітряний резервуар, постійний магніт, встановлений на ободі колеса локомотива, котушку індуктивності, встановлену на рамі локомотива, стабілізатор, мультивібратор та підсилювач, який відрізняється тим, що пристрій...
Пристрій для контролю витрати палива транспортного засобу з електричною передачею потужності
Номер патенту: 43110
Опубліковано: 15.11.2001
Автори: Шелковий Олександр Володимирович, Заскалько Олексій Петрович, Азаров Руслан Володимирович, Манзюк Сергій Викторович
МПК: B61C 15/00
Мітки: контролю, засобу, витрати, пристрій, транспортного, передачею, палива, потужності, електричною
Формула / Реферат:
Пристрій для контролю витрат палива транспортного засобу з електричною передачею потужності, який містить блок визначення потужності, який відрізняється тим, що включає у себе датчик напруги та датчик струму генератора, які поєднані своїми виходами зі входами блока визначення потужності, а також визначник режиму роботи двигуна, вихід якого з'єднаний через блок вибору апроксимуючої функції з другим входом арифметичного пристрою, перший вхід...
Пристрій безперервного діагностування технічного стану колісних пар залізничного екіпажу
Номер патенту: 34828
Опубліковано: 15.03.2001
Автори: Осенін Юрій Іванович, Богданов Олександр Вікторович
МПК: G08B 23/00
Мітки: залізничного, стану, пар, колісних, екіпажу, пристрій, технічного, діагностування, безперервного
Формула / Реферат:
Пристрій безперервного діагностування технічного стану колісних пар залізничного екіпажа, який складається з блоків сигналізації, блока управління й контролю, який відрізняється тим, що сигнал про порушення технічного стану колісної пари передасться безконтактне, для цього, в пристрої передбачені блоки сигналізації, встановлені на колісні диски, кожен з яких складається із датчика для реєстрації взаємних переміщень елементів нероз'ємних...
Попередній патент: Спосіб виготовлення бетону
Наступний патент: Твердий гідратований подвійний аміачний пірофосфат міді-цинку
Випадковий патент: Генератор псевдовипадкових двійкових наборів з рівною вагою