Пристрій для автоматичного контролю буксування валків вальцівного стана
Формула / Реферат
Пристрій для автоматичного контролю буксування валків вальцівного стана, що містить блок визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження й блок визначення моменту виникнення буксування валків по частоті коливань струму навантаження, який відрізняється тим, що він оснащений блоком визначення режиму прокатки, що включає датчик напруги, компаратор, диференціатор напруги й граничний елемент із джерелом опорної напруги, а також двома елементами "І"1 і "І"2, елементом "АБО" і одновібратором, при цьому блок визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження виконаний у вигляді датчика струму, керованого випрямляча, диференціатора струму й граничного елемента із джерелом опорної напруги, а блок визначення моменту виникнення буксування валків по частоті коливань струму навантаження виконаний у вигляді смугового фільтра, граничного елемента із джерелом опорної напруги й одновібратора, вихід якого з'єднаний з одним із входів елемента "І"2, другий вхід якого зв'язаний з виходом граничного елемента, при цьому вихід датчика струму з'єднаний з одним із входів керованого випрямляча й входом смугового фільтра, вихід якого з'єднаний з одним із входів граничного елемента, інший вхід якого з'єднаний із джерелом опорної напруги, а вихід граничного елемента з'єднаний із входом одновібратора й з одним із входів елемента "І"2, інший вхід якого з'єднаний з виходом першого одновібратора, інший вихід керованого випрямляча через диференціатор струму з'єднаний з одним із входів граничного елемента, інший вхід якого з'єднаний із джерелом опорної напруги, а вихід з'єднаний з іншим входом елемента "І"1, вихід датчика напруги з'єднаний з одним із входів керованого випрямляча й із входом компаратора, вихід якого з'єднаний з іншим входом керованого випрямляча, один з виходів якого з'єднаний із входом диференціатора напруги, вихід якого з'єднаний з одним із входів граничного елемента, інший вхід якого з'єднаний із джерелом опорної напруги, а вихід граничного елемента з'єднаний з одним із входів елемента "І"1, при цьому виходи двох елементів "І"1 і "І"2 з'єднані із входами елемента "АБО", вихід якого з'єднаний із входом другого одновібратора, вихід якого зв'язаний із задатчиком інтенсивності швидкості обертання валків штатної системи керування прокатного стана.
Текст
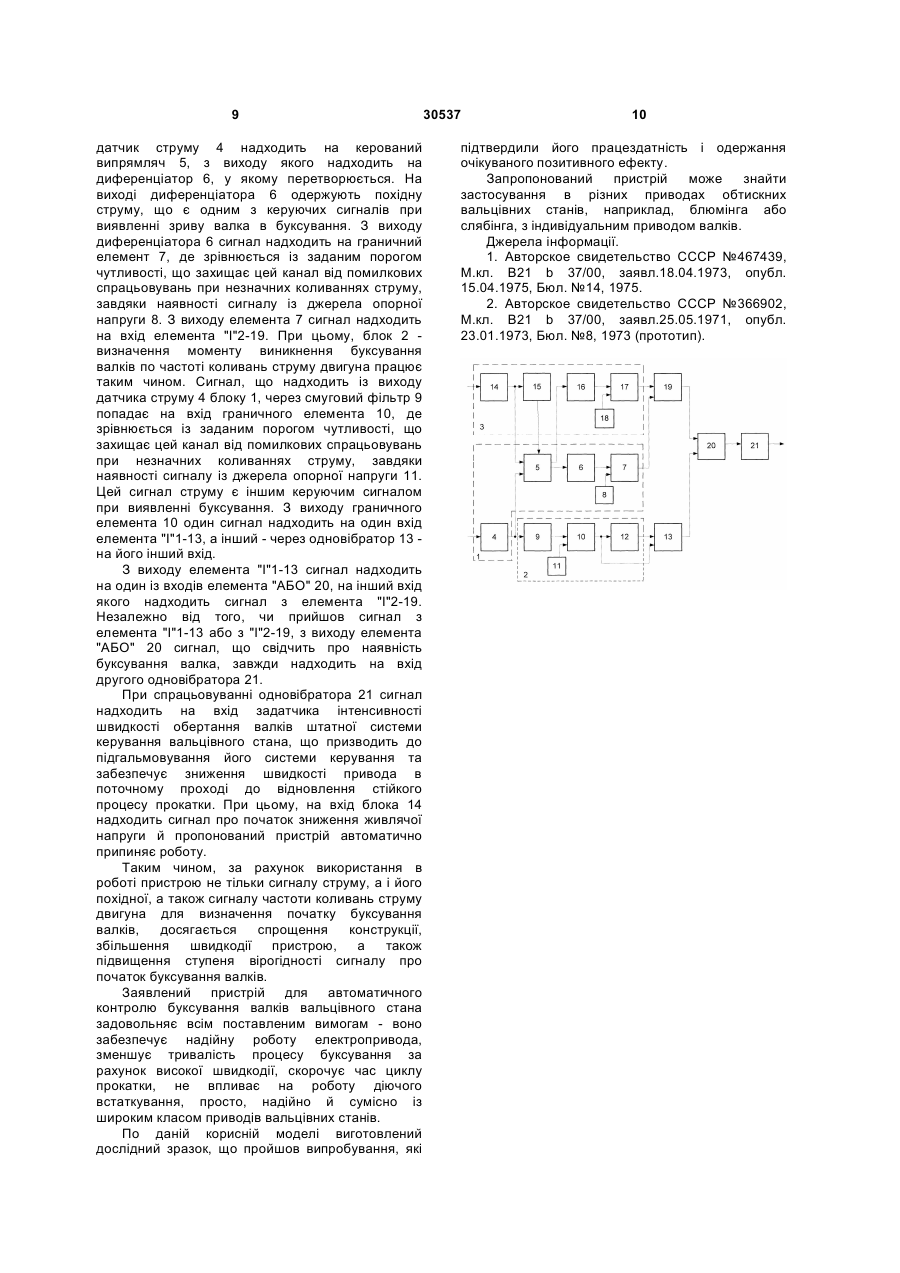
Пристрій для автоматичного контролю буксування валків вальцівного стана, що містить блок визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження й блок визначення моменту виникнення буксування валків по частоті коливань струму навантаження, який відрізняється тим, що він оснащений блоком визначення режиму прокатки, що включає датчик напруги, компаратор, диференціатор напруги й граничний елемент із джерелом опорної напруги, а також двома елементами "І"1 і "І"2, елементом "АБО" і одновібратором, при цьому блок визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження виконаний у вигляді датчика струму, керованого випрямляча, диференціатора струму й граничного елемента із джерелом опорної напруги, а блок визначення моменту виникнення буксування валків по частоті коливань струму навантаження виконаний у вигляді смугового фільтра, граничного елемента із джерелом опорної напруги й одновібратора, вихід якого U 2 (19) 1 3 поповнення енергії відбувається за рахунок власного джерела (електродвигуна); величина амплітуди коливань визначається параметрами системи; період коливань також обумовлений самою системою; відсутні збурні сили, що періодично змінюються. Це приводить до виникнення аварійних режимів на стані й значному погіршенню якості вальцьованого металу (появі хвилястості). Тому, важливим у процесі прокатки є виявлення не тільки буксування валків через зниження коефіцієнта тертя, але й "схованого" буксування внаслідок появи автоколивальних процесів. Відома система керування головним приводом обтискного реверсивного вальцівного стана з індивідуальним приводом робочих валків, яка дозволяє знизити динамічні навантаження в механічному обладнанні стана при пробуксовках смуги. Система, що включає задатчик інтенсивності з перемикаючим пристроєм і контури регулювання швидкості з датчиком швидкості, струму з датчиком струму, напруги й співвідношення навантажень вальцівних двигунів, додатково містить контур регулювання стійкості технологічного процесу прокатки, що складається з датчика контролю пробуксовок із двома виходами, регулятора розподілу навантажень і задавального пристрою, причому до входів датчика контролю пробуксовок приєднані виходи датчиків струму й швидкості вальцівних двигунів, виходи задавального пристрою, і регулятора розподілу навантажень, а виходи датчика контролю пробуксовок через перемикаючий пристрій підключені до входів задатчика інтенсивності [1]. До недоліків відомого пристрою варто віднести наступне. Дана система розрахована на роботу із системою генератор-двигун (Г-Д), що приводить до звуження діапазону її застосування. Система працює за принципом виявлення виникнення пробуксовки на одному з валків і порівняння сигналу з координатами швидкості й струму не буксуючого валка, що зменшує вірогідність отриманої інформації, тому що пробуксовка може виникати на двох валках одночасно. Це приводить до зниження ефективності даного пристрою. Найбільш близьким по технічній сутності до пропонованого пристрою й обраним за прототип, є відомий пристрій для автоматичного контролю буксування валків обтискного вальцівного стана з індивідуальним приводом валків, який встановлюють на верхній і нижній валки, що містить блок визначення буксування валків по різниці струмів навантаження двигунів верхнього й нижнього валків, блок визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження й блок визначення моменту виникнення буксування валків по частоті коливань струму навантаження, датчик напрямку прокатки, диференціювальний трансформатор, блок контролю керуючого сигналу й вихідний блок [2]. Пристрій застосовується для автоматичного виявлення буксування. 30537 4 Загальними ознаками відомого й пристроїв, що заявляється, є наявність блоку визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження й блоку визначення моменту виникнення буксування валків по частоті коливань струму навантаження. Недоліком відомого пристрою є складність конструкції у зв'язку з наявністю великої кількості елементів, у тому числі електронних, і, як наслідок, низька експлуатаційна надійність, недостатня швидкодія через використання в роботі сигналу струму для визначення початку буксування валків, а також недостатній ступінь вірогідності сигналу про початок буксування валків внаслідок того, що використовуваний фільтр може вловлювати коливання струму, які зв'язані також з іншими причинами, а не тільки з буксуванням валків, а також не дозволяє виявляти "сховане" буксування валків, яке зв'язане з появою автоколивальних процесів, що в цілому знижує надійність роботи й ефективність пристрою. Таким чином, відомі пристрої виявлення й усунення процесу буксування валків вальцівного стана не досить повно задовольняють всім вимогам, що ставлять до пристроїв даного типу, а саме: ефективність, простота, надійність, універсальність. Тому був створений пристрій для автоматичного контролю буксування валків вальцівного стана, переважно блюмінга або слябінга, який задовольняє всім перерахованим вимогам. В основу корисної моделі поставлене завдання вдосконалення пристрою для автоматичного контролю буксування валків вальцівного стана, у якому за рахунок введення нового блоку, і іншої схеми пристрою в цілому, що містить нові елементи й нові зв'язки між ними, досягається спрощення конструкції внаслідок використання меншої кількості елементів, збільшення швидкодії пристрою за рахунок використання похідної сигналу струму, а також підвищення ступеня вірогідності сигналу про початок буксування валків завдяки більшій інформативності сигналу з датчика струму, що забезпечує високу експлуатаційну надійність і ефективність роботи пристрою, його простоту й універсальність при усуванні його впливу на роботу діючого встаткування вальцівного стана, і за рахунок цього досягається скорочення можливості створення аварійних ситуацій, що забезпечує зменшення зношування й збільшення ресурсу валків вальцівного стана, шпинделів і проміжних валів, а також підвищення якості виробів, скорочення часу циклу прокатки, а отже, підвищення продуктивності й зменшення енерговитрат і підвищення надійності роботи привода валків вальцівного стана в цілому. Поставлене завдання досягається тим, що пристрій для автоматичного контролю буксування валків вальцівного стана, що містить блок визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження й блок визначення моменту 5 виникнення буксування валків по частоті коливань струму навантаження, відповідно до корисної моделі, постачений блоком визначення режиму прокатки, що включає датчик напруги, компаратор, диференціатор напруги й граничний елемент із джерелом опорної напруги, а також двома елементами "І"1 і "І"2, елементом "АБО" і одновібратором, при цьому блок визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження виконаний у вигляді датчика струму, керованого випрямляча, дифференціатора струму й граничного елемента із джерелом опорної напруги, а блок визначення моменту виникнення буксування валків по частоті коливань струму навантаження виконаний у вигляді смугового фільтра, граничного елемента із джерелом опорної напруги й одновібратора, вихід якого з'єднаний з одним із входів елемента "І"2, другий вхід якого зв'язаний з виходом граничного елемента, при цьому, вихід датчика струму з'єднаний з одним із входів керованого випрямляча й входом смугового фільтра, вихід якого з'єднаний з одним із входів граничного елемента, інший вхід якого з'єднаний із джерелом опорної напруги, а вихід граничного елемента з'єднаний із входом одновібратора й з одним із входів елемента "І"2, інший вхід якого з'єднаний з виходом першого одновібратора, інший вихід керованого випрямляча через диференціатор струму з'єднаний з одним із входів граничного елемента, інший вхід якого з'єднаний із джерелом опорної напруги, а вихід - з'єднаний з іншим входом елемента "І"1, вихід датчика напруги з'єднаний з одним із входів керованого випрямляча й із входом компаратора, вихід якого з'єднаний з іншим входом керованого випрямляча, один з виходів якого з'єднаний із входом диференціатора напруги, вихід якого з'єднаний з одним із входів граничного елемента, інший вхід якого з'єднаний із джерелом опорної напруги, а вихід граничного елемента з'єднаний з одним із входів елемента "І"1, при цьому виходи двох елементів "І"1 і "І"2 з'єднані із входами елемента "АБО", вихід якого з'єднаний із входом другого одновібратора, вихід якого зв'язаний із задатчиком інтенсивності швидкості обертання валків штатної системи керування вальцівного стана. У результаті використання корисної моделі, що заявляється, забезпечується одержання технічного результату, який полягає в спрощенні конструкції, збільшенні швидкодії пристрою, а також підвищенні ступеня вірогідності сигналу про початок буксування валків вальцівного стана. Між істотними ознаками корисної моделі, що заявляється, і технічним результатом, який досягається, існує наступний причиннонаслідковий зв'язок. У запропонованому пристрої для автоматичного контролю буксування валків вальцівного стана наявність нового блоку визначення режиму прокатки дозволяє з більшою точністю визначити момент початку процесу буксування валка вальцівного стана за принципом: якщо координата напруги на якорі двигуна незмінна або росте, а струм різко падає або 30537 6 з'являються його коливання, то це - буксування. У той же час, при зниженні значення напруги якоря двигуна блок визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження не працює. Введення нового елемента - диференціатора струму в блоці визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження дозволяє використати похідну струму в якості одного з керуючих сигналів при виявленні зриву валка в буксування, що дозволяє значно підвищити швидкодію роботи даного блоку й, як наслідок, пристрою в цілому. Введення смугового фільтра, використовуваного як датчик наявності автоколивального процесу при прокатці, дозволяє однозначно класифікувати виникнення такого роду коливань, як наявність "схованого" буксування, що підвищує ступінь вірогідності інформації про початок буксування валків, розширює функціональні можливості пристрою і його надійність. Таким чином, за рахунок введення в пропонований пристрій нового блоку визначення режиму прокатки, іншого схемного виконання блоку визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження й блоку визначення моменту виникнення буксування валків по частоті коливань струму навантаження, а також іншої схеми пристрою в цілому, що містить нові елементи й нові зв'язки між ними, досягається спрощення в порівнянні із прототипом конструкції пристрою внаслідок використання меншої кількості елементів, збільшення швидкодії пристрою за рахунок використання похідній сигналу струму, а також підвищення ступеня вірогідності сигналу про початок буксування валків завдяки більшій інформативності сигналу з датчика струму. У цілому, відмітні ознаки пристрою для автоматичного контролю буксування валків вальцівного стана, що заявляється, є істотними й необхідними для досягнення нового технічного результату. По наявним у заявника відомостям, сукупність істотних ознак, що характеризують сутність заявляємої корисної моделі, не відома з рівня техніки, що дозволяє зробити висновок про її відповідність критерію "новизна". Пристрій для автоматичного контролю буксування валків вальцівного стана, що заявляється, може бути багаторазово відтворений й використаний в приводній системі валків обтискних вальцівних станів з одержанням очікуваного технічного результату, що дозволяє зробити висновок про відповідність корисної моделі критерію "промислова застосовність". Таким чином, запропоноване технічне рішення відповідає встановленим умовам патентоспроможності корисної моделі. Сутність корисної моделі пояснюється кресленням, де зображена функціональна блоксхема пропонованого пристрою для автоматичного контролю буксування валків вальцівного стана. 7 На представленій схемі позначено: 1 - блок визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження; 2 - блок визначення моменту виникнення буксування валків по частоті коливань струму навантаження; 3 - блок визначення режиму прокатки; 4 - датчик струму; 5 - керований випрямляч; 6 - диференціатор струму; 7, 10, 17 граничні елементи; 8, 11, 18 - джерела опорної напруги; 9 - смуговий фільтр; 12, 21 - два одновібратори; 13, 19 - два елементи "І": "І"1 і "І"2 відповідно; 14 - датчик напруги; 15 - компаратор; 16 - диференціатор напруги; 20 - елемент "АБО". Заявлений пристрій для автоматичного контролю буксування валків вальцівного стана містить: блок 1 визначення моменту виникнення буксування валків по стрибкоподібному зменшенню струму навантаження, що виконаний у вигляді датчика струму 4, керованого випрямляча 5, диференціатора струму 6 і граничного елемента 7 із джерелом опорної напруги 8, і блок 2 визначення моменту виникнення буксування валків по частоті коливань струму навантаження, що виконане у вигляді смугового фільтра 9, граничного елемента 10 із джерелом опорної напруги 11 і одновібратора 12. Смуговий фільтр 9 використовується як датчик наявності автоколивального процесу при прокатці, при цьому він настроюється на власну частоту коливань кожної конкретної електромеханічної системи (у діапазоні частот від одиниць до десятків Герців). Наприклад, смуговий фільтр, може бути настроєний на частоту, близьку частоті пружних коливань системи, і перестоюється в діапазоні частот 10¸25Гц. Пропонований пристрій постачений блоком визначення режиму прокатки 3, зв'язаним зі штатною системою керування завдання швидкості й напрямки обертання обтискних валків вальцівного стана, що включає: датчик напруги 14, компаратор 15, дифференциатор напруги 16 і граничний елемент 17 із джерелом опорної напруги 18, а також двома елементами "І": "І"1-13 і "І"2-19 відповідно, елементом "АБО" 20 і другим одновібратором 21, вихід якого зв'язаний із задатчиком інтенсивності швидкості обертання валків штатної системи керування вальцівного стана (на кресленні не показана). Входи датчика струму 4 і датчики напруги 14 з'єднані із системою керування електродвигуном вальцівного стана (на кресленні не показане). При цьому, вихід датчика струму 4 з'єднаний з одним із входів керованого випрямляча 5 і входом смугового фільтра 9, вихід якого з'єднаний з одним із входів граничного елемента 10, інший вхід якого з'єднаний із джерелом опорної напруги 11, а вихід граничного елемента 10 з'єднаний із входом одновібратора 12 і з одним із входів елемента "І"1-13, інший вхід якого з'єднаний із входом одновібратора 12, інший вихід керованого випрямляча 5 через дифференциатор струму-6 з'єднаний з одним із входів граничного елемента 7, інший вихід якого з'єднаний із джерелом опорної напруги 8, а вихід з'єднаний з іншим входом елемента "І"2-19. Вихід датчика напруги 14 з'єднаний з одним із входів 30537 8 керованого випрямляча 5 і із входом компаратора 15, вихід якого з'єднаний з іншим входом керованого випрямляча 5, один з виходів якого з'єднаний із входом дифференциатора напруги 16, вихід якого з'єднаний з одним із входів граничного елемента 17, інший вхід якого з'єднаний із джерелом опорної напруги 18, а вихід граничного елемента 17 з'єднаний з одним із входів елемента "І"2 -19. Виходи елементів "І" 1-13 і "І"2-19 з'єднані із входами елемента "АБО" 20, вихід якого з'єднаний із входом другого одновібратора 12, вихід якого пов'язаний із задатчиком інтенсивності швидкості обертання валків штатної системи керування вальцівного стана. У пропонованому пристрої застосовані стандартні електронні елементи, що випускають промисловістю. Пропонований пристрій може бути використаний в приводній системі для виявлення й усунення процесу буксування валків будь-яких типів обтискних вальцівних станів з індивідуальним приводом валків і встановлюється на кожний із двигунів валків обтискного вальцівного стана, переважно на верхньому валку, тому що він найбільш схильний до буксування. Пропонований пристрій виявлення й усунення процесу буксування валків вальцівного стана працює таким чином. Визначення моменту початку буксування валка з контактною поверхнею злитка ідентифікується виходячи з характерних рис поводження струму й напруги по наступному алгоритму: ріст напруги, або його постійне значення, при стрибкоподібному зменшенні струму навантаження, або поява коливань струму навантаження з означеною частотою, означає виникнення буксування. При роботі вальцівного стана в режимі прокатки можливі два стани напруги на клемах вальцівного двигуна: воно може рости або залишатися постійним. У блоці 3 - визначення режиму прокатки інформація про живлячу напругу вальцівного двигуна із системи керування надходить на датчик напруги 14, звідки далі надходить на вхід компаратора 15, що визначає напрямок обертання двигуна, тобто полярність його живлячої напруги, а також на один із входів керованого випрямляча 5, де сигнал випрямляється. З виходу компаратора 15 сигнал іде на інший вхід керованого випрямляча 5, звідки надходить на вхід диференціатора напруги 16, у якому він перетворюєтся. З виходу диференціатора напруги 16 сигнал надходить на один із входів граничного елемента 17, де зрівнюється із заданим порогом чутливості, що захищає цей канал від помилкових спрацьовувань при незначних коливаннях напруги, завдяки наявності сигналу із джерела опорної напруги 18. Далі сигнал попадає на вхід елемента "І"2-19. Блок 1 - визначення моменту виникнення буксування валків по стрибкоподібному зменшенню сигналу струму двигуна використовується для виявлення початку процесу буксування. Для цього, струм якоря двигуна із системи керування вальцівним станом через 9 датчик струму 4 надходить на керований випрямляч 5, з виходу якого надходить на диференціатор 6, у якому перетворюється. На виході диференціатора 6 одержують похідну струму, що є одним з керуючих сигналів при виявленні зриву валка в буксування. З виходу диференціатора 6 сигнал надходить на граничний елемент 7, де зрівнюється із заданим порогом чутливості, що захищає цей канал від помилкових спрацьовувань при незначних коливаннях струму, завдяки наявності сигналу із джерела опорної напруги 8. З виходу елемента 7 сигнал надходить на вхід елемента "І"2-19. При цьому, блок 2 визначення моменту виникнення буксування валків по частоті коливань струму двигуна працює таким чином. Сигнал, що надходить із виходу датчика струму 4 блоку 1, через смуговий фільтр 9 попадає на вхід граничного елемента 10, де зрівнюється із заданим порогом чутливості, що захищає цей канал від помилкових спрацьовувань при незначних коливаннях струму, завдяки наявності сигналу із джерела опорної напруги 11. Цей сигнал струму є іншим керуючим сигналом при виявленні буксування. З виходу граничного елемента 10 один сигнал надходить на один вхід елемента "І"1-13, а інший - через одновібратор 13 на його інший вхід. З виходу елемента "І"1-13 сигнал надходить на один із входів елемента "АБО" 20, на інший вхід якого надходить сигнал з елемента "І"2-19. Незалежно від того, чи прийшов сигнал з елемента "І"1-13 або з "І"2-19, з виходу елемента "АБО" 20 сигнал, що свідчить про наявність буксування валка, завжди надходить на вхід другого одновібратора 21. При спрацьовуванні одновібратора 21 сигнал надходить на вхід задатчика інтенсивності швидкості обертання валків штатної системи керування вальцівного стана, що призводить до підгальмовування його системи керування та забезпечує зниження швидкості привода в поточному проході до відновлення стійкого процесу прокатки. При цьому, на вхід блока 14 надходить сигнал про початок зниження живлячої напруги й пропонований пристрій автоматично припиняє роботу. Таким чином, за рахунок використання в роботі пристрою не тільки сигналу струму, а і його похідної, а також сигналу частоти коливань струму двигуна для визначення початку буксування валків, досягається спрощення конструкції, збільшення швидкодії пристрою, а також підвищення ступеня вірогідності сигналу про початок буксування валків. Заявлений пристрій для автоматичного контролю буксування валків вальцівного стана задовольняє всім поставленим вимогам - воно забезпечує надійну роботу електропривода, зменшує тривалість процесу буксування за рахунок високої швидкодії, скорочує час циклу прокатки, не впливає на роботу діючого встаткування, просто, надійно й сумісно із широким класом приводів вальцівних станів. По даній корисній моделі виготовлений дослідний зразок, що пройшов випробування, які 30537 10 підтвердили його працездатність і одержання очікуваного позитивного ефекту. Запропонований пристрій може знайти застосування в різних приводах обтискних вальцівних станів, наприклад, блюмінга або слябінга, з індивідуальним приводом валків. Джерела інформації. 1. Авторское свидетельство СССР №467439, М.кл. В21 b 37/00, заявл.18.04.1973, опубл. 15.04.1975, Бюл. №14, 1975. 2. Авторское свидетельство СССР №366902, М.кл. В21 b 37/00, заявл.25.05.1971, опубл. 23.01.1973, Бюл. №8, 1973 (прототип).
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatic check of slipping of shafts of roller mill
Автори англійськоюBuriakovskyi Serhii Hennadiiovych
Назва патенту російськоюУстройство для автоматического контроля буксования валков вальцового стана
Автори російськоюБуряковский Сергей Геннадьевич
МПК / Мітки
МПК: B21B 38/00, B21B 37/00
Мітки: вальцівного, валків, буксування, контролю, автоматичного, пристрій, стана
Код посилання
<a href="https://ua.patents.su/5-30537-pristrijj-dlya-avtomatichnogo-kontrolyu-buksuvannya-valkiv-valcivnogo-stana.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматичного контролю буксування валків вальцівного стана</a>
Пристрій інформаційний для захисту опорних валків кліті прокатного стана
Номер патенту: 28494
Опубліковано: 10.12.2007
Автори: Тесля Михайло Дмитрович, Кирильченко Петро Миколайович, Бєляєв Олексій Миколайович, Сидоров Сергій Михайлович, Єрмашов Ігор Олександрович, Тростянецький Олег Брониславович, Івашина Володимир Володимирович, Скляренко Віталій Олексійович, Климанчук Владислав Владиславович, Джансиз Віктор Євгенович
МПК: B21B 33/00
Мітки: інформаційний, кліті, опорних, захисту, валків, прокатного, стана, пристрій
Формула / Реферат:
Пристрій інформаційний для захисту опорних валків кліті прокатного стана, що містить гвинт натискний, підп'ятник, стакан, кільце запобіжне, опору, який відрізняється тим, що всередині кільця запобіжного, в його нижній третині у глухому отворі, що фрезерований в опорі, встановлено датчик відстані для вимірювання поточної висоти кільця запобіжного.
Подушки робочих валків листового стана
Номер патенту: 4221
Опубліковано: 17.01.2005
Автор: Ніколаєв Віктор Олександрович
МПК: B21B 31/00
Мітки: листового, стана, робочих, валків, подушки
Формула / Реферат:
Подушки робочих валків листового стана, які включають підшипники кочення, плунжери гідравлічних пристроїв, котрі встановлено у подушках нижнього робочого валка, а бокові поверхні подушок робочих валків на частки висоти виконано з нахилом на кут φ = 3-45 град. проти напрямку обертання робочих валків, які відрізняються тим, що подушки робочих валків виконано з двох частин і при цьому складову частину з поверхнею, яка має нахил, переміщують...
Пристрій для виявлення буксування колісних пар локомотива
Номер патенту: 15171
Опубліковано: 15.06.2006
Автор: Шапран Євген Миколайович
МПК: B60L 3/10, G01P 15/16
Мітки: локомотива, колісних, пристрій, буксування, пар, виявлення
Формула / Реферат:
Пристрій для виявлення буксування колісних пар локомотива, який містить датчики струму і напруги тягових двигунів, підключених до входів відповідних диференціюючих блоків, елемент затримки, інвертор, логічний елемент кон'юнкції, виконавчий блок, а також задатчик інтервалів часу, перший та другий ключові елементи, виходи яких з'єднані з входами логічного елемента кон'юнкції, перший та другий інтегратори, перші входи яких з'єднані з виходами...
Пристрій для виявлення буксування чи юза колісних пар транспортного засобу
Номер патенту: 8782
Опубліковано: 15.08.2005
Автор: Шапран Євген Миколайович
МПК: B60L 3/10, G01P 15/16
Мітки: юза, транспортного, буксування, засобу, пристрій, виявлення, пар, колісних
Формула / Реферат:
Пристрій для виявлення буксування чи юза колісних пар транспортного засобу, що має для всіх ведучих колісних пар блоки розрахунку динамічного зусилля, кожен з яких містить датчик частоти обертання тягового двигуна, з'єднаний з одним із входів додаткового суматора, інший вхід якого підключений до виходу інтегратора, датчик струму якоря тягового двигуна, вихід якого з'єднаний з одним із входів блока множення, інший вхід якого через блок...
Система калібрування валків безперервного сортового стана
Номер патенту: 53779
Опубліковано: 17.02.2003
Автори: Димченко Євген Миколайович, Оробцев Андрій Юрійович, Шевердін Сергій Митрофанович, Букрєєв Іван Іванович, Сівак Едуард Володимирович, Парусов Олег Володимирович, Кулаков Леонід Васильович, Шишко Юрій Борисович, Жучков Сергій Михайлович, Шувякова Ірина Володимировна, Літвінов Леонід Федорович, Парусов Володимир Васильович, Лохматов Олександр Павлович
МПК: B21B 1/02
Мітки: система, сортового, безперервного, калібрування, стана, валків
Формула / Реферат:
Система калібрування валків безперервного сортового стана, переважно для здвоєної прокатки-розділяння, що містить калібри для деформування вихідної заготівки, калібр для одержання проміжного розкату, калібр із горизонтальною великою і вертикальною малою осями, діагональний квадратний калібр з округленими ребрами й опуклостями на його гранях, виконаними по радіусу, чорновий здвоєний калібр, розділювальний калібр і наступні калібри для...
Попередній патент: Спосіб визначення шорсткості поверхні деталі при обробці на металорізальному верстаті
Наступний патент: Плівковий електронагрівник
Випадковий патент: Спосіб одержання метилових естерів жирних кислот з рослинних олій та їх сумішей