Плавцевий рушій з електромагнітним приводом
Номер патенту: 39458
Опубліковано: 25.02.2009
Автори: Афонін Анатолій Олексійович, Каян Володимир Павлович, Гребеніков Віктор Володимирович
Формула / Реферат
Плавцевий рушій з електромагнітним приводом, що містить прикріплений до корпусу плавзасобу поворотний електромагнітний двигун, який є приводом поворотноколивального руху важеля, до вільного кінця якого шарнірно прикріплена підпружинена лопать, а також блок керування приводом, який відрізняється тим, що електромагнітний двигун виконано повноповоротним і він містить трифазний беззалізний статор з обмотками керування, які розміщені на немагнітному кільці в центральній площині симетрії двигуна, і ротор з двома дисками, на кожному з яких рівномірно по колу розміщено парне число постійних магнітів з перемінним чергуванням полюсів, а блок керування приводом містить мікропроцесор, напівпровідниковий комутатор фаз обмоток статора і систему контролю положення ротора, причому датчик положення ротора цієї системи через вхідний пристрій зв'язаний з мікропроцесором.
Текст
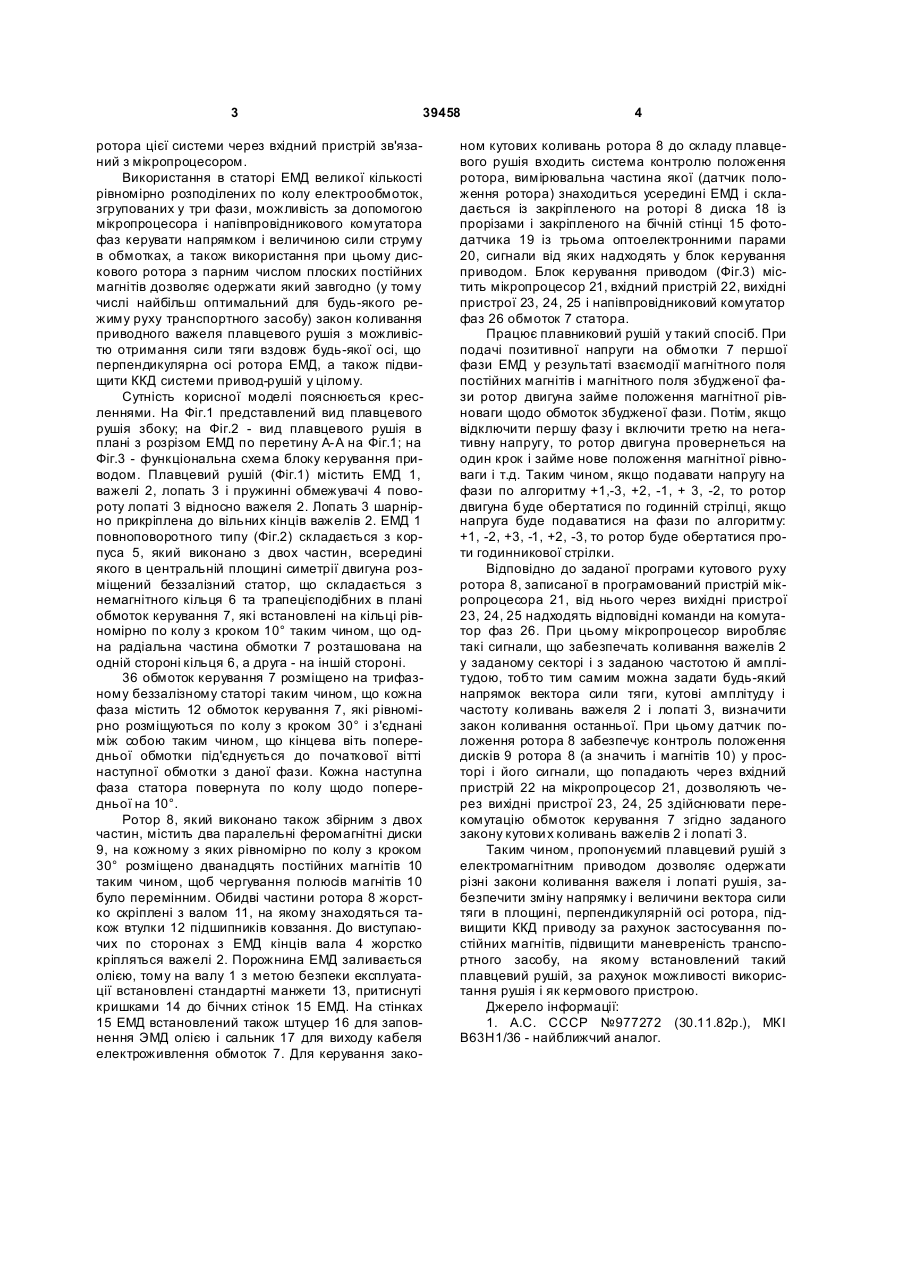
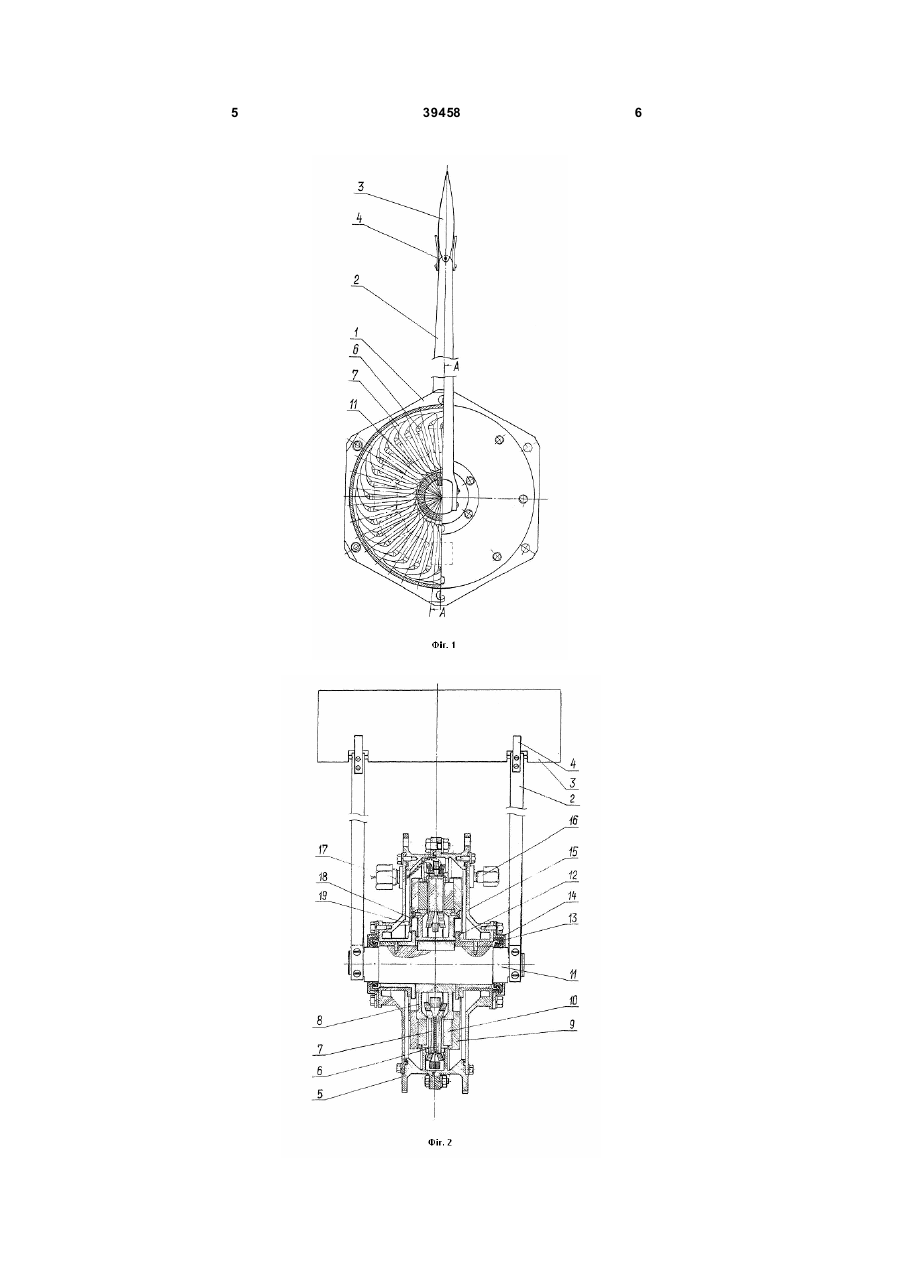
Плавцевий рушій з електромагнітним приводом, що містить прикріплений до корпусу плавзасобу поворотний електромагнітний двигун, який є приводом поворотноколивального руху важеля, до вільного кінця якого шарнірно прикріплена підпружинена лопать, а також блок керування приводом, 3 39458 ротора цієї системи через вхідний пристрій зв'язаний з мікропроцесором. Використання в статорі ЕМД великої кількості рівномірно розподілених по колу електрообмоток, згрупованих у три фази, можливість за допомогою мікропроцесора і напівпровідникового комутатора фаз керувати напрямком і величиною сили струму в обмотках, а також використання при цьому дискового ротора з парним числом плоских постійних магнітів дозволяє одержати який завгодно (у тому числі найбільш оптимальний для будь-якого режиму руху транспортного засобу) закон коливання приводного важеля плавцевого рушія з можливістю отримання сили тяги вздовж будь-якої осі, що перпендикулярна осі ротора ЕМД, а також підвищити ККД системи привод-рушій у цілому. Сутність корисної моделі пояснюється кресленнями. На Фіг.1 представлений вид плавцевого рушія збоку; на Фіг.2 - вид плавцевого рушія в плані з розрізом ЕМД по перетину А-А на Фіг.1; на Фіг.3 - функціональна схема блоку керування приводом. Плавцевий рушій (Фіг.1) містить ЕМД 1, важелі 2, лопать 3 і пружинні обмежувачі 4 повороту лопаті 3 відносно важеля 2. Лопать 3 шарнірно прикріплена до вільних кінців важелів 2. ЕМД 1 повноповоротного типу (Фіг.2) складається з корпуса 5, який виконано з двох частин, всередині якого в центральній площині симетрії двигуна розміщений беззалізний статор, що складається з немагнітного кільця 6 та трапецієподібних в плані обмоток керування 7, які встановлені на кільці рівномірно по колу з кроком 10° таким чином, що одна радіальна частина обмотки 7 розташована на одній стороні кільця 6, а друга - на іншій стороні. 36 обмоток керування 7 розміщено на трифазному беззалізному статорі таким чином, що кожна фаза містить 12 обмоток керування 7, які рівномірно розміщуються по колу з кроком 30° і з'єднані між собою таким чином, що кінцева віть попередньої обмотки під'єднується до початкової вітті наступної обмотки з даної фази. Кожна наступна фаза статора повернута по колу щодо попередньої на 10°. Ротор 8, який виконано також збірним з двох частин, містить два паралельні феромагнітні диски 9, на кожному з яких рівномірно по колу з кроком 30° розміщено дванадцять постійних магнітів 10 таким чином, щоб чергування полюсів магнітів 10 було перемінним. Обидві частини ротора 8 жорстко скріплені з валом 11, на якому знаходяться також втулки 12 підшипників ковзання. До виступаючих по сторонах з ЕМД кінців вала 4 жорстко кріпляться важелі 2. Порожнина ЕМД заливається олією, тому на валу 1 з метою безпеки експлуатації встановлені стандартні манжети 13, притиснуті кришками 14 до бічних стінок 15 ЕМД. На стінках 15 ЕМД встановлений також штуцер 16 для заповнення ЭМД олією і сальник 17 для виходу кабеля електроживлення обмоток 7. Для керування зако 4 ном кутових коливань ротора 8 до складу плавцевого рушія входить система контролю положення ротора, вимірювальна частина якої (датчик положення ротора) знаходиться усередині ЕМД і складається із закріпленого на роторі 8 диска 18 із прорізами і закріпленого на бічній стінці 15 фотодатчика 19 із трьома оптоелектронними парами 20, сигнали від яких надходять у блок керування приводом. Блок керування приводом (Фіг.3) містить мікропроцесор 21, вхідний пристрій 22, вихідні пристрої 23, 24, 25 і напівпровідниковий комутатор фаз 26 обмоток 7 статора. Працює плавниковий рушій у такий спосіб. При подачі позитивної напруги на обмотки 7 першої фази ЕМД у результаті взаємодії магнітного поля постійних магнітів і магнітного поля збудженої фази ротор двигуна займе положення магнітної рівноваги щодо обмоток збудженої фази. Потім, якщо відключити першу фазу і включити третю на негативну напругу, то ротор двигуна провернеться на один крок і займе нове положення магнітної рівноваги і т.д. Таким чином, якщо подавати напругу на фази по алгоритму +1,-3, +2, -1, + 3, -2, то ротор двигуна буде обертатися по годинній стрілці, якщо напруга буде подаватися на фази по алгоритму: +1, -2, +3, -1, +2, -3, то ротор буде обертатися проти годинникової стрілки. Відповідно до заданої програми кутового руху ротора 8, записаної в програмований пристрій мікропроцесора 21, від нього через вихідні пристрої 23, 24, 25 надходять відповідні команди на комутатор фаз 26. При цьому мікропроцесор виробляє такі сигнали, що забезпечать коливання важелів 2 у заданому секторі і з заданою частотою й амплітудою, тобто тим самим можна задати будь-який напрямок вектора сили тяги, кутові амплітуду і частоту коливань важеля 2 і лопаті 3, визначити закон коливання останньої. При цьому датчик положення ротора 8 забезпечує контроль положення дисків 9 ротора 8 (а значить і магнітів 10) у просторі і його сигнали, що попадають через вхідний пристрій 22 на мікропроцесор 21, дозволяють через вихідні пристрої 23, 24, 25 здійснювати перекомутацію обмоток керування 7 згідно заданого закону кутови х коливань важелів 2 і лопаті 3. Таким чином, пропонуємий плавцевий рушій з електромагнітним приводом дозволяє одержати різні закони коливання важеля і лопаті рушія, забезпечити зміну напрямку і величини вектора сили тяги в площині, перпендикулярній осі ротора, підвищити ККД приводу за рахунок застосування постійних магнітів, підвищити маневреність транспортного засобу, на якому встановлений такий плавцевий рушій, за рахунок можливості використання рушія і як кермового пристрою. Джерело інформації: 1. А.С. СССР №977272 (30.11.82р.), МКІ В63Н1/36 - найближчий аналог. 5 39458 6 7 Комп’ютерна в ерстка О. Рябко 39458 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFin propeller with electromagnetic actuator
Автори англійськоюAfonin Anatolii Oleksiiovych, Hrebenikov Viktor Volodymyrovych, Kaian Volodymyr Pavlovych
Назва патенту російськоюПлавниковый движитель с электромагнитным приводом
Автори російськоюАфонин Анатолий Алексеевич, Гребеников Виктор Владимирович, Каян Владимир Павлович
МПК / Мітки
МПК: B63H 1/00
Мітки: приводом, плавцевий, електромагнітним, рушій
Код посилання
<a href="https://ua.patents.su/4-39458-plavcevijj-rushijj-z-elektromagnitnim-privodom.html" target="_blank" rel="follow" title="База патентів України">Плавцевий рушій з електромагнітним приводом</a>
Плавцевий рушій
Номер патенту: 39457
Опубліковано: 25.02.2009
Автори: Каян Володимир Павлович, Глушко Валентин Миколайович
МПК: B63H 1/00
Формула / Реферат:
1. Плавцевий рушій, що містить привідний важіль, встановлений з можливістю кутового коливального руху, на кінці якого пружно закріплена з можливістю повороту П-подібна рама з пружною пластиною, який відрізняється тим, що пластина має прямокутну форму в плані і виконана з тонкого пружного металу, а на передній і задній кромках пластини жорстко закріплені осі, кінці яких шарнірно встановлені в опорах П-подібної рами, причому опори задньої осі...
Плавцевий рушій апарата
Номер патенту: 25355
Опубліковано: 30.10.1998
Автори: Бабенко Віктор Вітальович, Коробов Віталій Ілліч, Поліщук Сергій Володимирович
МПК: B63H 1/36
Мітки: рушій, плавцевий, апарата
Формула / Реферат:
Плавниковый движитель аппарата, содержащий стебель со встроенным в нем электродвигателем, отличающийся тем, что последний имеет выходные оси, размещенные перпендикулярно продольной оси подводного аппарата, переходящие в двуплечий рычаг, соединенный с плавниковым движителем, а последний имеет в своем теле электродвигатель с шестерней, расположенной между рейками, соединенными посредством фигурных рычагов с пластинами.
Вібраційна притиральна машина з електромагнітним приводом

Номер патенту: 25383
Опубліковано: 10.08.2007
Автори: Ланець Олексій Степанович, Шпак Ярослав Володимирович, Гаврильченко Олександр Віталійович
МПК: B06B 1/02
Мітки: притиральна, машина, приводом, вібраційна, електромагнітним
Формула / Реферат:
Вібраційна притиральна машина з електромагнітним приводом, що містить круглі верхній та нижній притири, встановлені концентрично один відносно одного, коловий електромагнітний віброзбудник, концентрично розташований відносно притирів, осердя з котушками якого симетрично по колу закріплені під нижнім притиром, в якому жорстко по центру защемлена вертикальна пружна система, яка відрізняється тим, що вертикальна пружна система виконана у вигляді...
Вібраційна притиральна машина з електромагнітним приводом
Номер патенту: 29988
Опубліковано: 11.02.2008
Автори: Ланець Олексій Степанович, Шпак Ярослав Володимирович, Гаврильченко Олександр Віталійович
МПК: B06B 1/00
Мітки: електромагнітним, вібраційна, машина, притиральна, приводом
Формула / Реферат:
Вібраційна притиральна машина з електромагнітним приводом, що містить круглі верхній та нижній притири, встановлені концентрично один відносно одного, коловий електромагнітний віброзбудник, концентрично розташований відносно притирів, осердя з котушками якого симетрично по колу закріплені під нижнім притиром, вертикальну пружну систему у вигляді одного вертикально розташованого пружного стрижня, що жорстко защемлена по центру в нижньому...
Плавцевий рушій
Номер патенту: 25621
Опубліковано: 30.10.1998
Автори: Бабенко Віктор Вітальович, Коробов Віталій Ілліч, Поліщук Сергій Володимирович
МПК: B63H 1/36
Формула / Реферат:
Плавниковый движитель, содержащий крыло со встроенным в нем электроприводом, отличающийся тем, что в прорези торцевой поверхности крыла установлен диск, связанный системой шкивов и тросиков с валом электродвигателя вращательного движения, а на торцевой поверхности крыла имеется выступ с отверстием, в котором расположена заслонка, связанная с рычагом сердечника электромагнита, причем отверстие через внутрикрыловую полость соединено с выемкой...
Попередній патент: Плавцевий рушій
Наступний патент: Спосіб оцінки пошкоджуваності поверхневого шару конструкції
Випадковий патент: Спосіб збільшення швидкості руху судна