Електромеханічний вертебральний тренажер
Номер патенту: 41708
Опубліковано: 10.06.2009
Автори: Авдєєв Анатолій Миколайович, Прокопчук Юрій Олександрович, Кравченко Олександр Васильович, Бражнікова Галина Єгорівна, Кулик Анатолій Дмитрович

Формула / Реферат
1. Електромеханічний вертебральний тренажер, що складається з корпуса та розміщених в ньому напрямної з повзуном (кареткою) і ложементом для ніг, електродвигуна з передаточним пристроєм, зв'язаним з кареткою, джерела живлення і пульта керування, який відрізняється тим, що передаточний пристрій виконаний у вигляді з'єднаних між собою за допомогою обертоперетворювача (редуктора або мультиплікатора) електродвигуна та кривошипного колеса, зв'язаного тягою (шатуном) з повзуном (кареткою).
2. Тренажер за п. 1, який відрізняється тим, що кривошипне колесо включає механізм переналагодження ексцентриситету, виконаний у вигляді роз'ємно з'єднаних між собою двох ексцентричних півмуфт, одна з яких постійно з'єднана з вихідним валом обертоперетворювача, а друга - з тягою (шатуном).
3. Тренажер за п. 1 або п. 2, який відрізняється тим, що кривошипне колесо зв'язане тягою (шатуном) з проміжним повзуном на проміжній напрямній, яка встановлена на рухомій частині гвинтового регулятора, причому цей повзун ковзкою парою з'єднаний з коромислом, у якому виконано паз, а саме коромисло шарнірно з'єднане одним кінцем з допоміжною тягою, з'єднаною з кареткою, а другим - з корпусом тренажера.
Текст
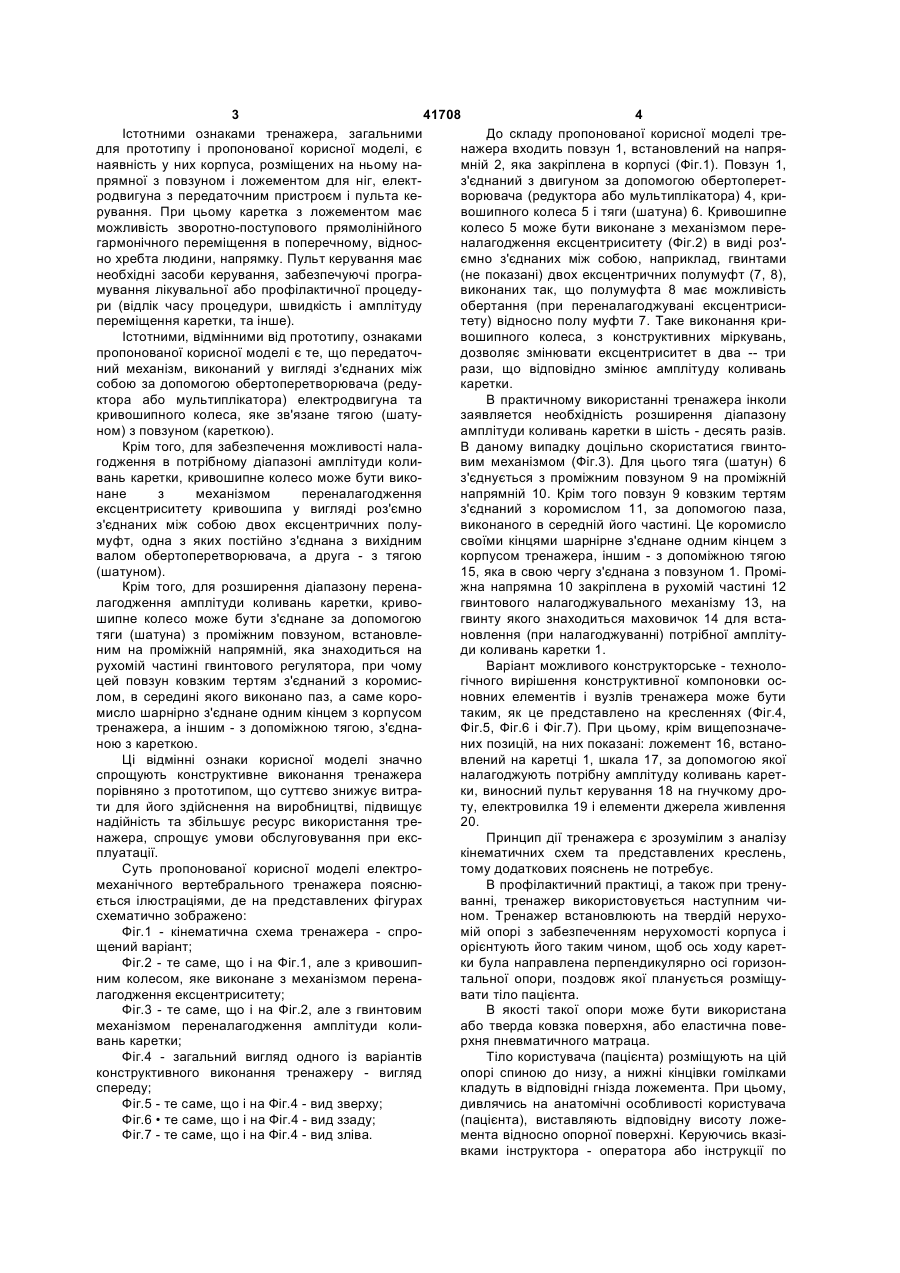
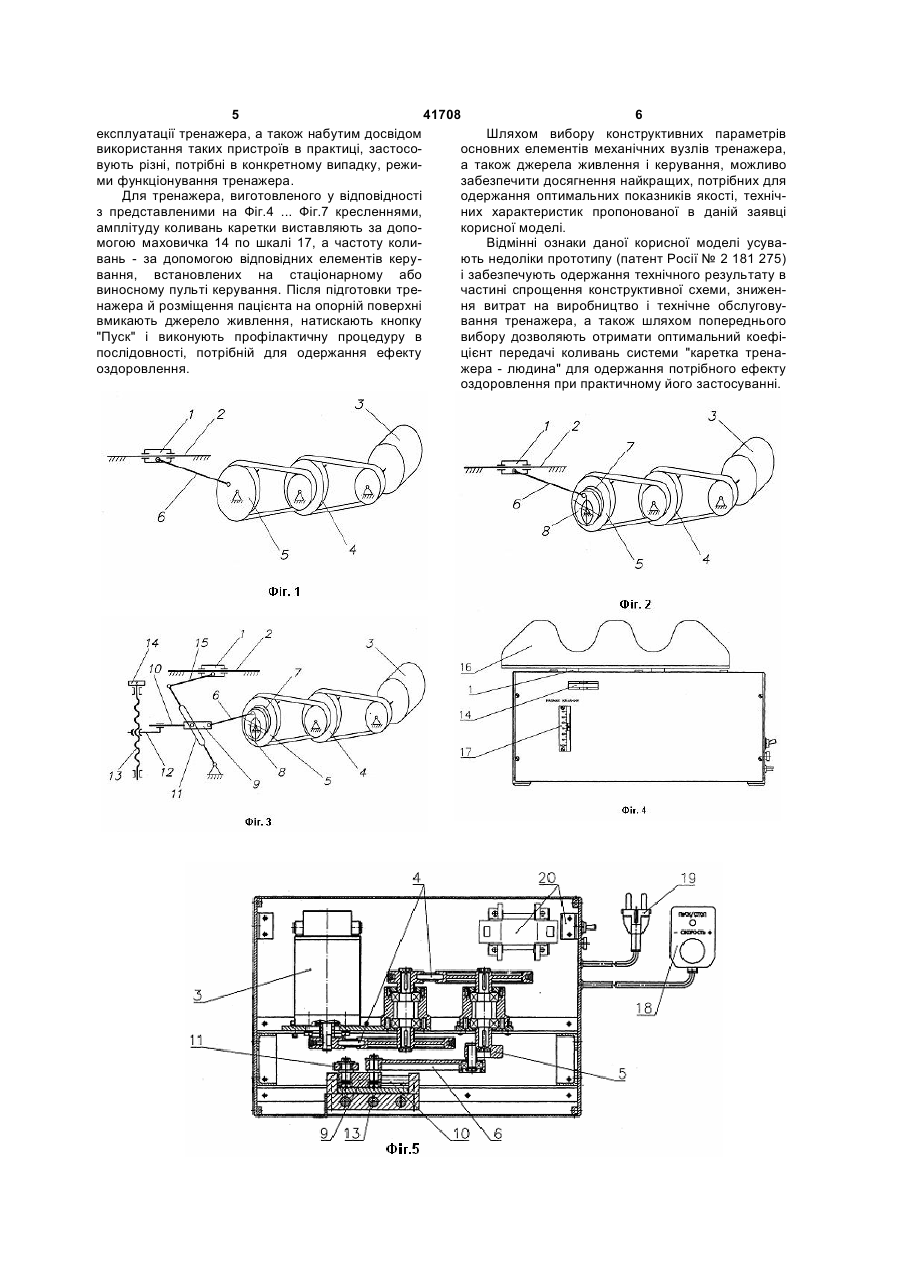
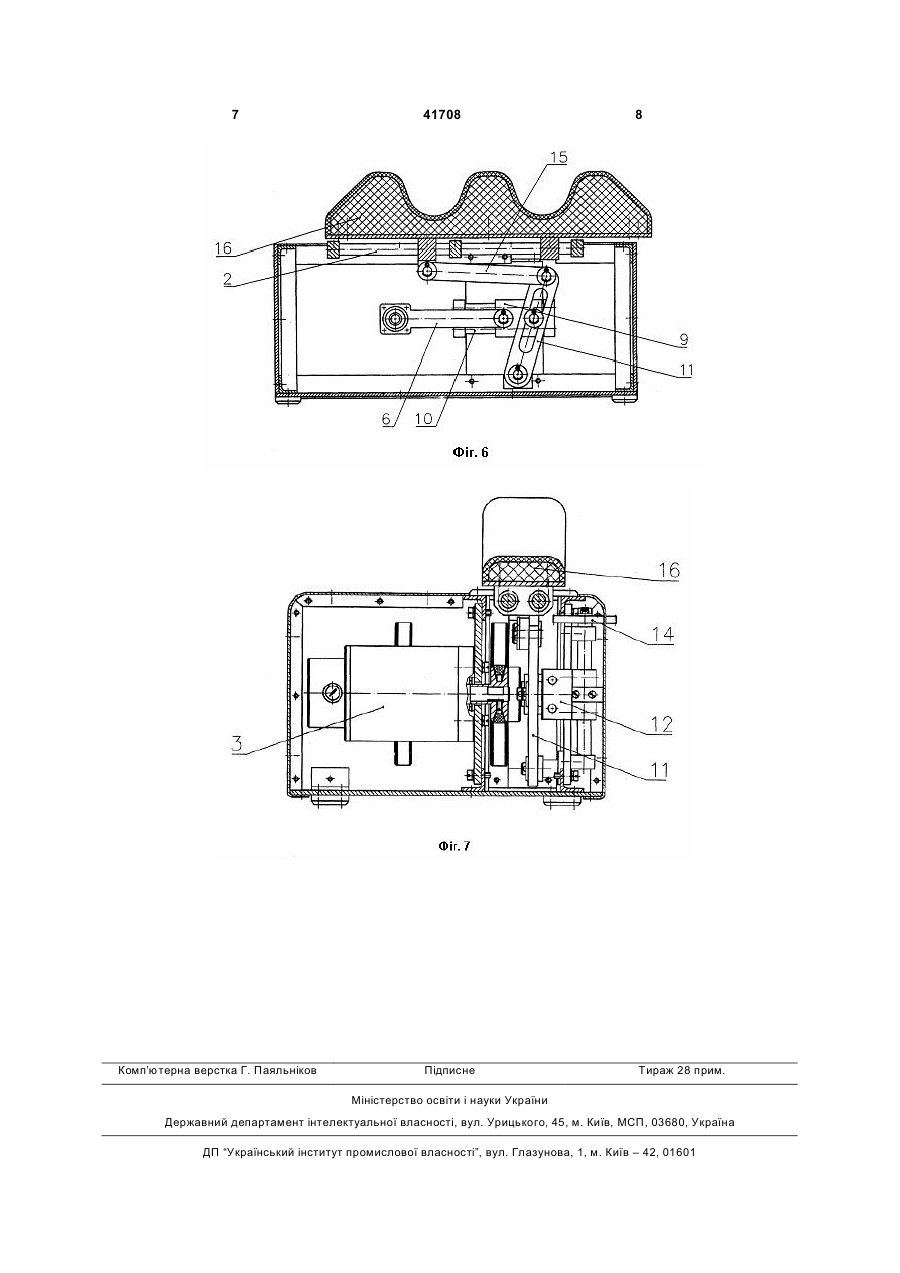
1. Електромеханічний вертебральний тренажер, що складається з корпуса та розміщених в ньому напрямної з повзуном (кареткою) і ложементом для ніг, електродвигуна з передаточним пристроєм, зв'язаним з кареткою, джерела живлення і пульта керування, який відрізняється тим, що передаточний пристрій виконаний у вигляді з'єднаних між собою за допомогою обертоперетворювача (редуктора або мультиплікатора) електродви 3 41708 4 Істотними ознаками тренажера, загальними До складу пропонованої корисної моделі тредля прототипу і пропонованої корисної моделі, є нажера входить повзун 1, встановлений на напрянаявність у них корпуса, розміщених на ньому намній 2, яка закріплена в корпусі (Фіг.1). Повзун 1, прямної з повзуном і ложементом для ніг, електз'єднаний з двигуном за допомогою обертоперетродвигуна з передаточним пристроєм і пульта кеворювача (редуктора або мультиплікатора) 4, крирування. При цьому каретка з ложементом має вошипного колеса 5 і тяги (шатуна) 6. Кривошипне можливість зворотно-поступового прямолінійного колесо 5 може бути виконане з механізмом перегармонічного переміщення в поперечному, відносналагодження ексцентриситету (Фіг.2) в виді роз'но хребта людини, напрямку. Пульт керування має ємно з'єднаних між собою, наприклад, гвинтами необхідні засоби керування, забезпечуючі програ(не показані) двох ексцентричних полумуфт (7, 8), мування лікувальної або профілактичної процедувиконаних так, що полумуфта 8 має можливість ри (відлік часу процедури, швидкість і амплітуду обертання (при переналагоджувані ексцентрисипереміщення каретки, та інше). тету) відносно полу муфти 7. Таке виконання криІстотними, відмінними від прототипу, ознаками вошипного колеса, з конструктивних міркувань, пропонованої корисної моделі є те, що передаточдозволяє змінювати ексцентриситет в два -- три ний механізм, виконаний у вигляді з'єднаних між рази, що відповідно змінює амплітуду коливань собою за допомогою обертоперетворювача (редукаретки. ктора або мультиплікатора) електродвигуна та В практичному використанні тренажера інколи кривошипного колеса, яке зв'язане тягою (шатузаявляется необхідність розширення діапазону ном) з повзуном (кареткою). амплітуди коливань каретки в шість - десять разів. Крім того, для забезпечення можливості налаВ даному випадку доцільно скористатися гвинтогодження в потрібному діапазоні амплітуди коливим механізмом (Фіг.3). Для цього тяга (шатун) 6 вань каретки, кривошипне колесо може бути викоз'єднується з проміжним повзуном 9 на проміжній нане з механізмом переналагодження напрямній 10. Крім того повзун 9 ковзким тертям ексцентриситету кривошипа у вигляді роз'ємно з'єднаний з коромислом 11, за допомогою паза, з'єднаних між собою двох ексцентричних полувиконаного в середній його частині. Це коромисло муфт, одна з яких постійно з'єднана з вихідним своїми кінцями шарнірне з'єднане одним кінцем з валом обертоперетворювача, а друга - з тягою корпусом тренажера, іншим - з допоміжною тягою (шатуном). 15, яка в свою чергу з'єднана з повзуном 1. ПроміКрім того, для розширення діапазону перенажна напрямна 10 закріплена в рухомій частині 12 лагодження амплітуди коливань каретки, кривогвинтового налагоджувального механізму 13, на шипне колесо може бути з'єднане за допомогою гвинту якого знаходиться маховичок 14 для встатяги (шатуна) з проміжним повзуном, встановленовлення (при налагоджуванні) потрібної амплітуним на проміжній напрямній, яка знаходиться на ди коливань каретки 1. рухомій частині гвинтового регулятора, при чому Варіант можливого конструкторське - технолоцей повзун ковзким тертям з'єднаний з коромисгічного вирішення конструктивної компоновки ослом, в середині якого виконано паз, а саме короновних елементів і вузлів тренажера може бути мисло шарнірно з'єднане одним кінцем з корпусом таким, як це представлено на кресленнях (Фіг.4, тренажера, а іншим - з допоміжною тягою, з'єднаФіг.5, Фіг.6 і Фіг.7). При цьому, крім вищепозначеною з кареткою. них позицій, на них показані: ложемент 16, встаноЦі відмінні ознаки корисної моделі значно влений на каретці 1, шкала 17, за допомогою якої спрощують конструктивне виконання тренажера налагоджують потрібну амплітуду коливань каретпорівняно з прототипом, що суттєво знижує витраки, виносний пульт керування 18 на гнучкому дроти для його здійснення на виробництві, підвищує ту, електровилка 19 і елементи джерела живлення надійність та збільшує ресурс використання тре20. нажера, спрощує умови обслуговування при ексПринцип дії тренажера є зрозумілим з аналізу плуатації. кінематичних схем та представлених креслень, Суть пропонованої корисної моделі електротому додаткових пояснень не потребує. механічного вертебрального тренажера пояснюВ профілактичний практиці, а також при тренується ілюстраціями, де на представлених фігурах ванні, тренажер використовується наступним чисхематично зображено: ном. Тренажер встановлюють на твердій нерухоФіг.1 - кінематична схема тренажера - спромій опорі з забезпеченням нерухомості корпуса і щений варіант; орієнтують його таким чином, щоб ось ходу каретФіг.2 - те саме, що і на Фіг.1, але з кривошипки була направлена перпендикулярно осі горизонним колесом, яке виконане з механізмом перенатальної опори, поздовж якої планується розміщулагодження ексцентриситету; вати тіло пацієнта. Фіг.3 - те саме, що і на Фіг.2, але з гвинтовим В якості такої опори може бути використана механізмом переналагодження амплітуди колиабо тверда ковзка поверхня, або еластична повевань каретки; рхня пневматичного матраца. Фіг.4 - загальний вигляд одного із варіантів Тіло користувача (пацієнта) розміщують на цій конструктивного виконання тренажеру - вигляд опорі спиною до низу, а нижні кінцівки гомілками спереду; кладуть в відповідні гнізда ложемента. При цьому, Фіг.5 - те саме, що і на Фіг.4 - вид зверху; дивлячись на анатомічні особливості користувача Фіг.6 • те саме, що і на Фіг.4 - вид ззаду; (пацієнта), виставляють відповідну висоту ложеФіг.7 - те саме, що і на Фіг.4 - вид зліва. мента відносно опорної поверхні. Керуючись вказівками інструктора - оператора або інструкції по 5 41708 6 експлуатації тренажера, а також набутим досвідом Шляхом вибору конструктивних параметрів використання таких пристроїв в практиці, застосоосновних елементів механічних вузлів тренажера, вують різні, потрібні в конкретному випадку, режиа також джерела живлення і керування, можливо ми функціонування тренажера. забезпечити досягнення найкращих, потрібних для Для тренажера, виготовленого у відповідності одержання оптимальних показників якості, технічз представленими на Фіг.4 ... Фіг.7 кресленнями, них характеристик пропонованої в даній заявці амплітуду коливань каретки виставляють за допокорисної моделі. могою маховичка 14 по шкалі 17, а частоту колиВідмінні ознаки даної корисної моделі усувавань - за допомогою відповідних елементів керують недоліки прототипу (патент Росії № 2 181 275) вання, встановлених на стаціонарному або і забезпечують одержання технічного результату в виносному пульті керування. Після підготовки тречастині спрощення конструктивної схеми, зниженнажера й розміщення пацієнта на опорній поверхні ня витрат на виробництво і технічне обслуговувмикають джерело живлення, натискають кнопку вання тренажера, а також шляхом попереднього "Пуск" і виконують профілактичну процедуру в вибору дозволяють отримати оптимальний коефіпослідовності, потрібній для одержання ефекту цієнт передачі коливань системи "каретка тренаоздоровлення. жера - людина" для одержання потрібного ефекту оздоровлення при практичному його застосуванні. 7 Комп’ютерна верстка Г. Паяльніков 41708 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromechanic vertebral trainer
Автори англійськоюAvdieev Anatolii Mykolaiovych, Brazhnikova Halyna Yehorivna, Kravchenko Oleksandr Vasyliovych, Kulyk Anatolii Dmytrovych, Prokopchuk Yurii Oleksandrovych
Назва патенту російськоюЭлектромеханический вертебральный тренажер
Автори російськоюАвдеев Анатолий Николаевич, Бражникова Галина Егоровна, Кравченко Александр Васильевич, Кулик Анатолий Дмитриевич, Прокопчук Юрий Александрович
МПК / Мітки
МПК: A61H 1/02
Мітки: електромеханічний, вертебральний, тренажер
Код посилання
<a href="https://ua.patents.su/4-41708-elektromekhanichnijj-vertebralnijj-trenazher.html" target="_blank" rel="follow" title="База патентів України">Електромеханічний вертебральний тренажер</a>
Електромеханічний тренажер для спорту та фітнесу

Номер патенту: 86557
Опубліковано: 27.04.2009
Автори: Толстой Олексій Володимирович, Васильєв Валерій Валентинович, Беліков Віктор Тріфонович, Поповіченко Олександр Вікторович
МПК: A63B 23/04, A63B 24/00, A63B 22/00
Мітки: тренажер, електромеханічний, спорту, фітнесу
Формула / Реферат:
1. Електромеханічний тренажер для спорту і фітнесу, що складається з генератора електромагнітного зусилля навантаження у вигляді електромеханічного перетворювача електричної енергії, рухомий елемент якого забезпечений рукоятками, що забезпечують механічний зв'язок тренажера і пацієнта, який відрізняється тим, що електромеханічний перетворювач електричної енергії, що підводиться до тренажера, виконаний у вигляді широкорегульованого лінійного...
Тренажер гусеничної машини
Номер патенту: 32625
Опубліковано: 15.02.2001
Автори: Магерамов Лютфалій Курбан-Алійович, Смоляков Василь Андрійович, Гулевський Юрій Володимирович, Борисюк Михайло Дем'янович
МПК: G09B 9/04
Мітки: гусеничної, машини, тренажер
Текст:
...упор виконаний у вигляді гідроци ліндра, зв'язаного з пдроприводом CM О ю Винахід стосується технічни х засобів навчання водінню наземних гусеничних транспортних засобів, зокрема, танка Відомий тренажер танка, який містить місток керування для навчаючого з кіноустановкою, сполучений з кабіною з розміщеними у ній органами керування р ухом Перед кабіною розміщений екран Кабіна через опору і кронштейни з'єднана з основою, спорядженою...
Тренажер для самозарядного пристрою метальної дії
Номер патенту: 82990
Опубліковано: 10.06.2008
Автори: Черкашин Сергій Віталійович, Жихарь Костянтин Іванович
МПК: F41G 3/26
Мітки: тренажер, самозарядного, метальної, дії, пристрою
Формула / Реферат:
1. Тренажер для самозарядного пристрою метальної дії, що обладнаний джерелом випромінювання, встановленим у пристрої метальної дії, що має корпус, ствол, затвор із затворною затримкою і набійник, який відрізняється тим, що тренажер виконаний геометрично подібним до корпуса штатного магазина для метальних снарядів і встановлений із можливістю пересування у корпусі пристрою метальної дії на місце, призначене для штатного магазина для метальних...
Тренажер для навчання керуванню повітронагрівачами доменної печі
Номер патенту: 19327
Опубліковано: 15.12.2006
Автори: Олейник Констянтин Максимович, Томашков Олексій Романович
МПК: G09B 9/00
Мітки: керуванню, печі, повітронагрівачами, навчання, тренажер, доменної
Формула / Реферат:
Тренажер для навчання керуванню повітронагрівачами доменної печі, що містить шафу керування повітронагрівачами доменної печі, який відрізняється тим, що він оснащений зменшеним у масштабі макетом доменної печі з повітронагрівачами і системою очищення, з'єднаними електричною схемою із шафою керування повітронагрівачами доменної печі, причому макети доменної печі принаймні одного з повітронагрівачів і системи очищення виконані в розрізі по...
Спортивно-ігровий тренажер

Номер патенту: 40325
Опубліковано: 10.04.2009
Автор: Корженівський Андрій Анатолійович
МПК: A61H 1/02, A63B 21/00
Мітки: спортивно-ігровий, тренажер
Формула / Реферат:
1. Спортивно-ігровий тренажер, що включає спортивний тренажер та комп'ютерний пристрій, клавіатурний контролер, клавіатуру, порт USB з можливістю підключення до комп'ютера або іншого ігрового приладу, перетворювач руху у комп'ютерний сигнал, який відрізняється тим, що тренажер виконаний у вигляді тренажера з обертовим рухом, при цьому перетворювач руху у комп'ютерний сигнал з'єднаний з рухомою частиною тренажера та підключений до...
Попередній патент: Конструктивне рішення консервації покрівлі із хвилястих азбестоцементних листів
Наступний патент: Техпроцес мікробіологічної переробки відходів, що містять жири
Випадковий патент: Різьбовий кінець трубчастого компонента для буріння або експлуатації вуглеводневих свердловин і з'єднання, що отримується