Вібростенд
Номер патенту: 42545
Опубліковано: 15.10.2001
Автори: Кундеревич Євген Костянтинович, Бублик Григорій Федорович, Цисарж Вячеслав Вікторович
Формула / Реферат
Вібростенд, що містить нерухому і рухому платформи, причому хоча б одна з них, принаймні частково, виготовлена з феромагнітного матеріалу, пружний підвіс, виконаний у вигляді вертикально встановлених пружних елементів, консольне закріплених на нерухомій і рухомій платформах, і збудник коливань рухомої платформи в горизонтальній площині, який відрізняється тим, що між нерухомою і рухомою платформами встановлена магнітна система, напрямок осі якої є перпендикулярним до напрямку коливань рухомої платформи в горизонтальній площині, з зазором між магнітною системою і платформою, яка, принаймні частково, виготовлена з феромагнітного матеріалу, причому зазор визначають із співвідношення
![]()
де ![]() d - зазор між магнітною системою і платформою, яка, принаймні частково, виготовлена з феромагнітного матеріалу;
d - зазор між магнітною системою і платформою, яка, принаймні частково, виготовлена з феромагнітного матеріалу;
k - коефіцієнт, який враховує геометрію магнітної системи і силу, що її магнетує;
n - кількість пружних елементів;
l - довжина пружних елементів між місцями консольного защемлення на нерухомій і рухомій платформах;
Е - модуль пружності матеріалу пружних елементів;
І - момент інерції поперечного nepeрізy пружних елементів.
Текст
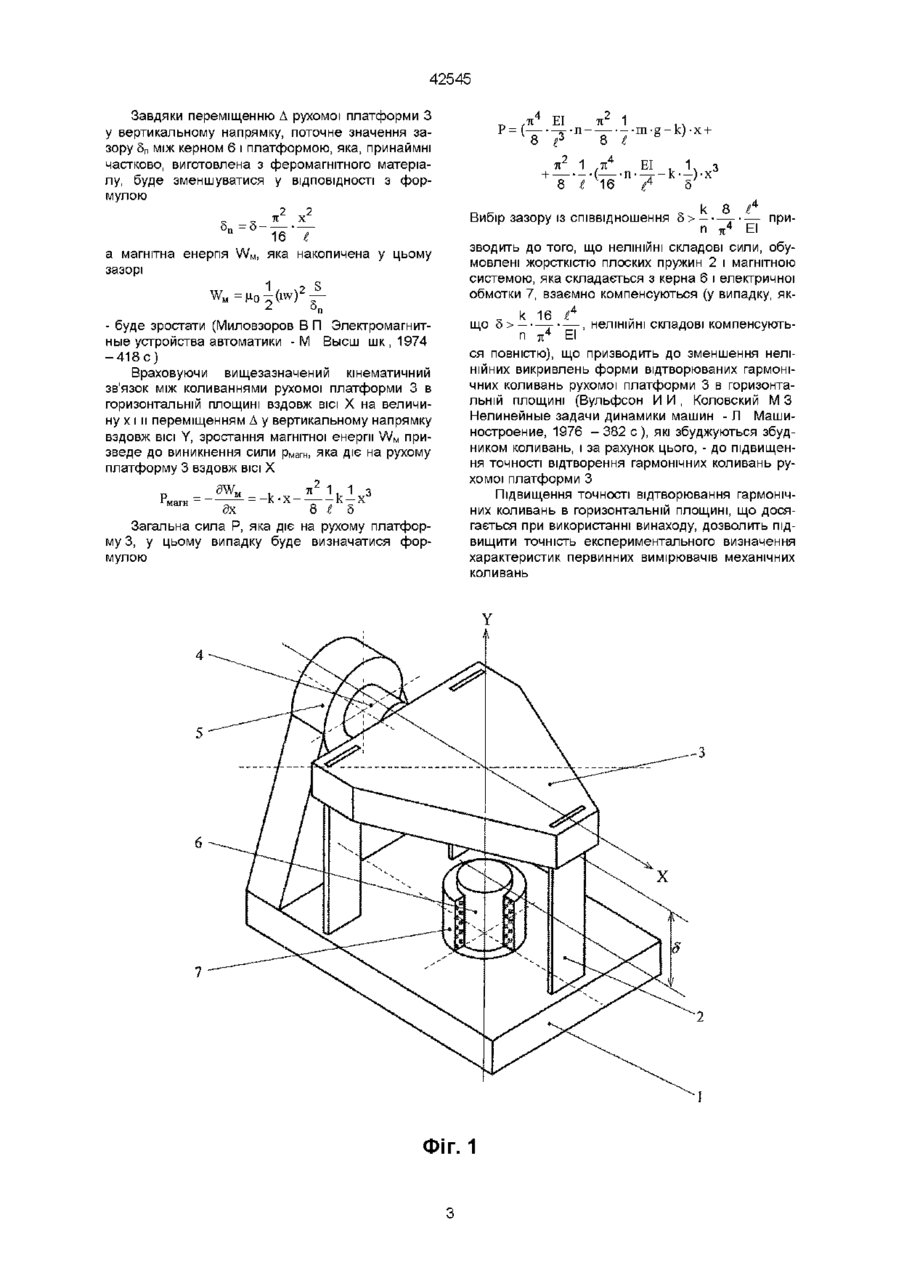
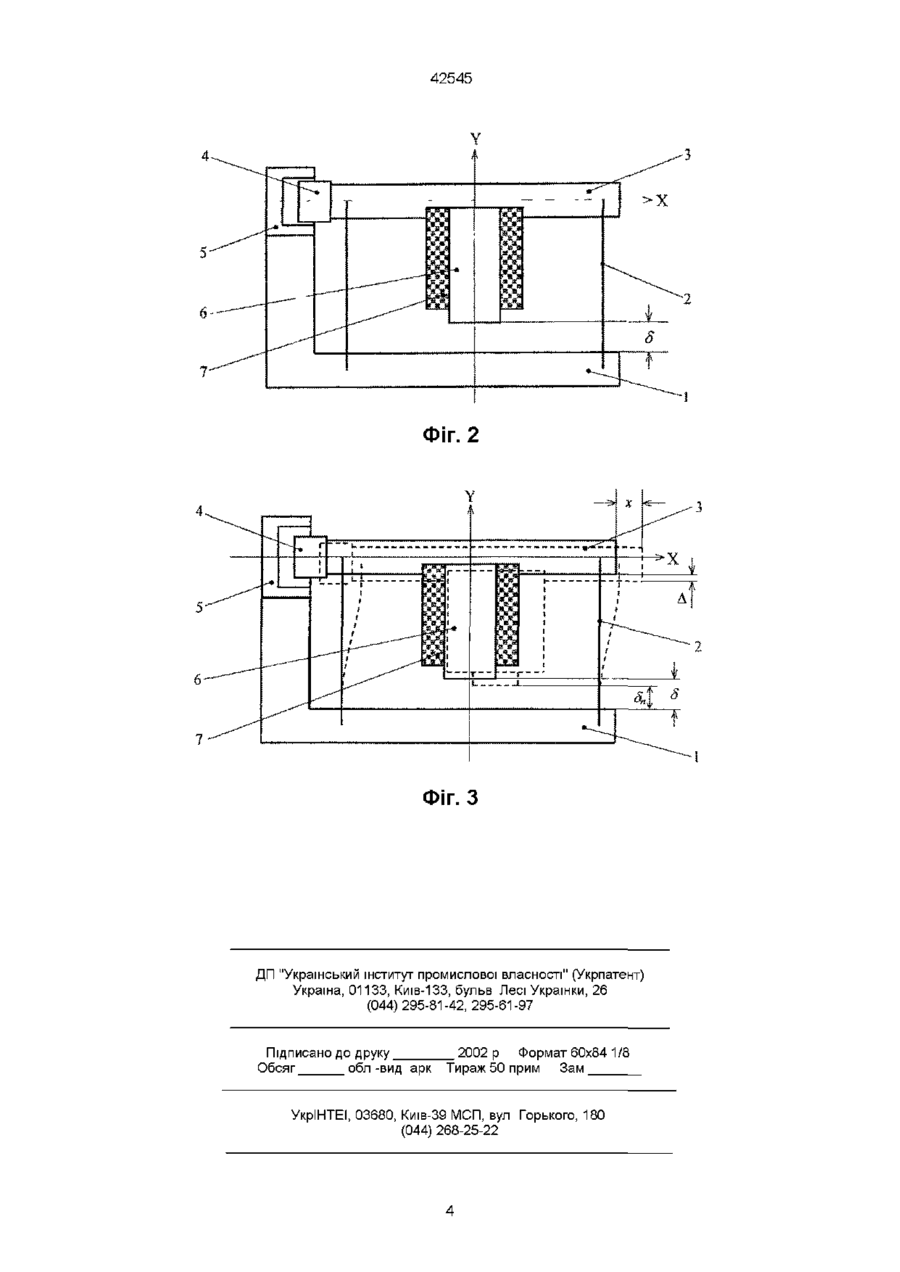
Вібростенд, що містить нерухому і рухому платформи, причому хоча б одна з них, принаймні частково, виготовлена з феромагнітного матеріалу, пружний ПІДВІС, виконаний у вигляді вертикально встановлених пружних елементів, консольно закріплених на нерухомій і рухомій платформах, і збудник коливань рухомої платформи в горизонтальній площині, який відрізняється тим, що між нерухомою і рухомою платформами встановлена магнітна система, напрямок осі якої є перпендикулярним до напрямку коливань рухомої платформи в горизонтальній площині, з зазором між магнітною системою і платформою, яка, принаймні частково, виготовлена з феромагнітного матеріалу, причому зазор визначають із співвідношення А k Винахід, що описується, належить до приладобудування, зокрема, до техніки вібраційних випробувань вимірювачів параметрів механічних коливань, переважно поступального характеру, і може бути використаний в якості вібростенда для динамічних ІСПИТІВ і експериментального визначення характеристик первинних вимірювачів Відомо вібростенд для відтворення горизонтальних коливань, який містить основу, рухому платформу, пружній ПІДВІС рухомої платформи у вигляді плоских пружин, які з'єднують рухому платформу з основою, і пересувні затискачі для зміни активної довжини пружин з метою керування власною частотою підвісу (Иориш Ю И Калибровка инфранизкочастотных датчиков // Вибрационная техника - М МДНТП, 1969 - № 2) Недоліком цього вібростенда є неможливість проведення експериментальних досліджень в широкому діапазоні частот, що пояснюється обмеженим діапазоном зміни власної частоти підвісу за допомогою пересувних затискачів Найбільш близьким до винаходу за технічної суті є горизонтальний вібростенд, який містить нерухому і рухому платформи, причому, хоча б одна з них, принаймні частково, виготовлена з феромагнітного матеріалу, пружну систему підвісу рухомої платформи на вертикально встановлених пружних елементах, консольно закріплених на нерухомій і рухомій платформах, і збудник коливань рухомої платформи в горизонтальній площині Такий вібростенд дозволяє провадити експериментальні дослідження в широкому діапазоні частот (А с № 1136050, МКИ G01M7/00, 1985) Недоліком вібростенда є викривлення форми я п ЕІ 5 - зазор між магнітною системою і платформою, яка, принаймні частково, виготовлена з феромагнітного матеріалу, k - коефіцієнт, який враховує геометрію магнітної системи і силу, що її магнетує, п - КІЛЬКІСТЬ пружних елементів, £ - довжина пружних елементів між місцями консольного защемлення на нерухомій і рухомій платформах, Е - модуль пружності матеріалу пружних елементів, І - момент інерції поперечного перерізу пружних елементів відтворюваних коливань рухомої платформи в горизонтальній ПЛОЩИНІ, ЩО ПОЯСНЮЄТЬСЯ НЄЛІНІЙНІС тю характеристики жорсткості пружних елементів В основу винаходу поставлено задачу удосконалити вібростенд шляхом встановлення між нерухомою і рухомою платформами магнітної системи, напрямок ВІСІ якої є перпендикулярним до напрямку відтворюваних коливань рухомої платформи в горизонтальній площині, що забезпечить компенсацію нелінійності характеристики жорсткості пружних елементів, і, як наслідок, зменшення викривлень форми відтворюваних коливань рухомої платформи в горизонтальній площині, за рахунок чого підвищується точність експериментально ю ю 42545 го визначення хараісгеристик первинних вимірювачів Поставлена задача виконується тим, що в вібростенді, який містить нерухому і рухому платформи, причому, хоча б одна з них, принаймні частково, виготовлена з феромагнітного матеріалу, пружний ПІДВІС, виконаний у вигляді вертикально встановлених пружних елементів, консольно закріплених на нерухомій і рухомій платформах, і збудник коливань рухомої платформи в горизонтальній площині, новим є те, що між нерухомою і рухомою платформами встановлена магнітна система, напрямок осі якої є перпендикулярним до напрямку коливань рухомої платформи в горизонтальній площині, з зазором між магнітною системою і платформою, яка, принаймні частково, виготовлена з феромагнітного матеріалу, причому, зазор визначають із співвідношення я k п А ЕІ Де 5 - зазор між магнітною системою і платформою, яка, принаймні частково, виготовлена з феромагнітного матеріалу, k - коефіцієнт, який враховує геометрію магнітної системи і силу, що її магнетує, п - КІЛЬКІСТЬ пружних елементів, £ - довжина пружних елементів між місцями консольного защемлення на нерухомій і рухомій платформах, Е - модуль пружності матеріалу пружних елементів, І - момент інерції поперечного перерізу пружних елементів Таке встановлення магнітної системи і вибір зазору із вищевказаного співвідношення дозволить компенсувати нелінійність характеристики жорсткості пружних елементів, що призведе до зменшення викривлень форми відтворюваних коливань рухомої платформи в горизонтальній площині і, за рахунок цього, підвищити точність експериментального визначення характеристик первинних вимірювачів На фіг 1 представлено приклад схеми вібростенда, коли рухома платформа, принаймні частково, виготовлена з феромагнітного матеріалу і магнітна система встановлена на нерухомій платформі, на фіг 2 представлено приклад схеми розрізу вібростенда, коли нерухома платформа, принаймні частково, виготовлена з феромагнітного матеріалу і магнітна система встановлена на рухомій платформі, а на фіг 3 - схема, яка пояснює принцип дії винаходу Вібростенд складається з нерухомої платформи 1, на якій консольно закріплені нижні КІНЦІ вертикально встановлених пружних елементів 2, що мають форму плоских пружин, верхні КІНЦІ ЯКИХ консольно закріплені на рухомій платформі 3 Коливання рухомої платформи 3 в горизонтальній площині збуджуються електродинамічним вібратором, рухома котушка 4 якого закріплена на рухомій платформі 3, а система підмагнетовування 5 - на нерухомій платформі 1 У випадку, коли рухома платформа 3, принаймні частково, виготовлена з феромагнітного матеріалу (див фіг 1), магнітна система, яка складається з керна 6 і електричної обмотки 7 і напрямок ВІСІ якої, є перпендикулярним до напрямку коливань рухомої платформи 3 в горизонтальній площині, тобто, збігається з віссю Y, встановлюється на нерухомій платформі 1 з зазором між керном 6 і рухомою платформою 3, який обирається із співвідношення > k ЕІ п в якому коефіцієнт k визначається як .2 16 _S_ 52 Де iw - сила, що магнетує, тобто, ампер-витки електричної обмотки 7, S - площа поперечного перетину керна 6 У випадку, коли нерухома платформа 1, принаймні частково, виготовлена феромагнітного матеріалу (див фіг 2), магнітна система, яка складається з керна 6 і електричної обмотки 7 і напрямок ВІСІ якої, є перпендикулярним до напрямку коливань рухомої платформи 3 в горизонтальній площині, тобто, збігається з віссю Y, встановлюється на рухомій платформі 3 з зазором між керном 6 і нерухомою платформою 1, який обирається із співвідношення k > ЕІ п Принцип роботи вібростенда полягає в тому, що при коливаннях рухомої платформи 3 в горизонтальній площині вздовж ВІСІ X, які збуджуються електродинамічним вібратором, виникає сила, яка діє на рухому платформу 3 вздовж ВІСІ X і залежить від величини х (див фіг 3) цих коливань рухомої платформи 3 Складовими цієї сили є сила Рпруж, обумовлена жорсткістю плоских пружин 2 на згин 71 4 Тб~ 8 А і сила Рпер, обумовлена перекидним моментом пруж P. пер . 2Z 7l 1 -mgx де m - маса рухомої платформи 3 (Бублик ГФ , Кочмар Б Ф , Лариончик В Н Анализ упругой характеристики амортизатора // Вест Киев политехи ин-та Приборостроение - 1982 - Вып 12 С 12-15) Відтворення коливань рухомої платформи 3 в горизонтальній площині вздовж ВІСІ X супроводжується переміщенням Д (див фіг 3) рухомої платформи 3 у вертикальному напрямку вздовж ВІСІ Y, тобто, у напрямку, перпендикулярному до ВІСІ X Це переміщення обумовлено деформацією плоских пружин 2 і кінематично пов'язане з коливаннями рухомої платформи 3 в горизонтальній площині співвідношенням 16 І (Бублик Г Ф , Кочмар Б Ф , Лариончик В Н Анализ упругой характеристики амортизатора // Вест Киев политехи ин-та Приборостроение - 1982 Вып 12 -С 12-15) 42545 Завдяки переміщенню Д рухомої платформи З у вертикальному напрямку, поточне значення зазору 5П між керном 6 і платформою, яка, принаймні частково, виготовлена з феромагнітного матеріа ЕІ 71 ЕІ лу, буде зменшуватися у ВІДПОВІДНОСТІ З фор мулою 2 5 П 2 ті х =5- — •— 16 £ а магнітна енергія W H , яка накопичена у цьому зазорі м Ц о 2 1 W 5n - буде зростати (Миловзоров В П Электромагнитные устройства автоматики - М Высш шк,1974 -418с) Враховуючи вищезазначений кінематичний зв'язок між коливаннями рухомої платформи 3 в горизонтальній площині вздовж ВІСІ X на величину х і и переміщенням Д у вертикальному напрямку вздовж ВІСІ Y, зростання магнітної енергії W H призведе ДО ВИНИКНеННЯ СИЛИ Рнагн, ЯКЭ ДІЄ НЭ руХОМу платформу 3 вздовж ВІСІ X ах = -к-х 1, 1 • £ 5 -к —х Загальна сила Р, яка діє на рухому платформу З, у цьому випадку буде визначатися формулою 1 n - —•-•m-g-k)-x + £ 16 — / г 1 - k •- ) • 5 k 8 Вибір зазору із співвідношення 5> — прип зводить до того, що нелінійніскладові сили, обумовлені жорсткістю плоских пружин 2 і магнітною системою, яка складається з керна 6 і електричної обмотки 7, взаємно компенсуються (у випадку, як, що 5 > k 16 £4 ЕІ , нелінійні складові компенсуютьЕІ ся повністю), ЩО призводить до зменшення нелінійних викривлень форми відтворюваних гармонічних коливань рухомої платформи 3 в горизонтальній площині (Вульфсон И И , Коловский М З Нелинейные задачи динамики машин - Л Машиностроение, 1976 - 382 с ), які збуджуються збудником коливань, і за рахунок цього, - до підвищення точності відтворення гармонічних коливань рухомої платформи З Підвищення точності відтворювання гармонічних коливань в горизонтальній площині, що досягається при використанні винаходу, дозволить підвищити точність експериментального визначення характеристик первинних вимірювачів механічних коливань ФІГ. 1 4 42545 Фіг. 2 Y Фіг. З ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Киів-133, бульв Лесі Українки, 26 (044)295-81-42, 295-61-97 Підписано до друку Обсяг с)бл -вид арк 2002 р Формат 60x84 1/8 Тираж 50 прим Зам УкрІНТЕІ, 03680, Киів-39 МСП, вулі Горького, 180 (044) 268-25-22
ДивитисяДодаткова інформація
Назва патенту англійськоюVibro-stand
Автори англійськоюBublyk Hryhorii Fedorovych, Kunderevych Yevhen Kostiantynovych, Tsysarzh Viacheslav Viktorovych
Назва патенту російськоюВибростенд
Автори російськоюБублик Григорий Федорович, Кундеревич Евгений Константинович, Цисарж Вячеслав Викторович
МПК / Мітки
МПК: G01M 7/04
Мітки: вібростенд
Код посилання
<a href="https://ua.patents.su/4-42545-vibrostend.html" target="_blank" rel="follow" title="База патентів України">Вібростенд</a>
Вібростенд
Номер патенту: 10670
Опубліковано: 25.12.1996
Автори: Виноградов Юрій Іванович, Бахмудов Курбан Алісултанович, Олехнович Казимир Олександрович
МПК: B28B 1/08
Мітки: вібростенд
Формула / Реферат:
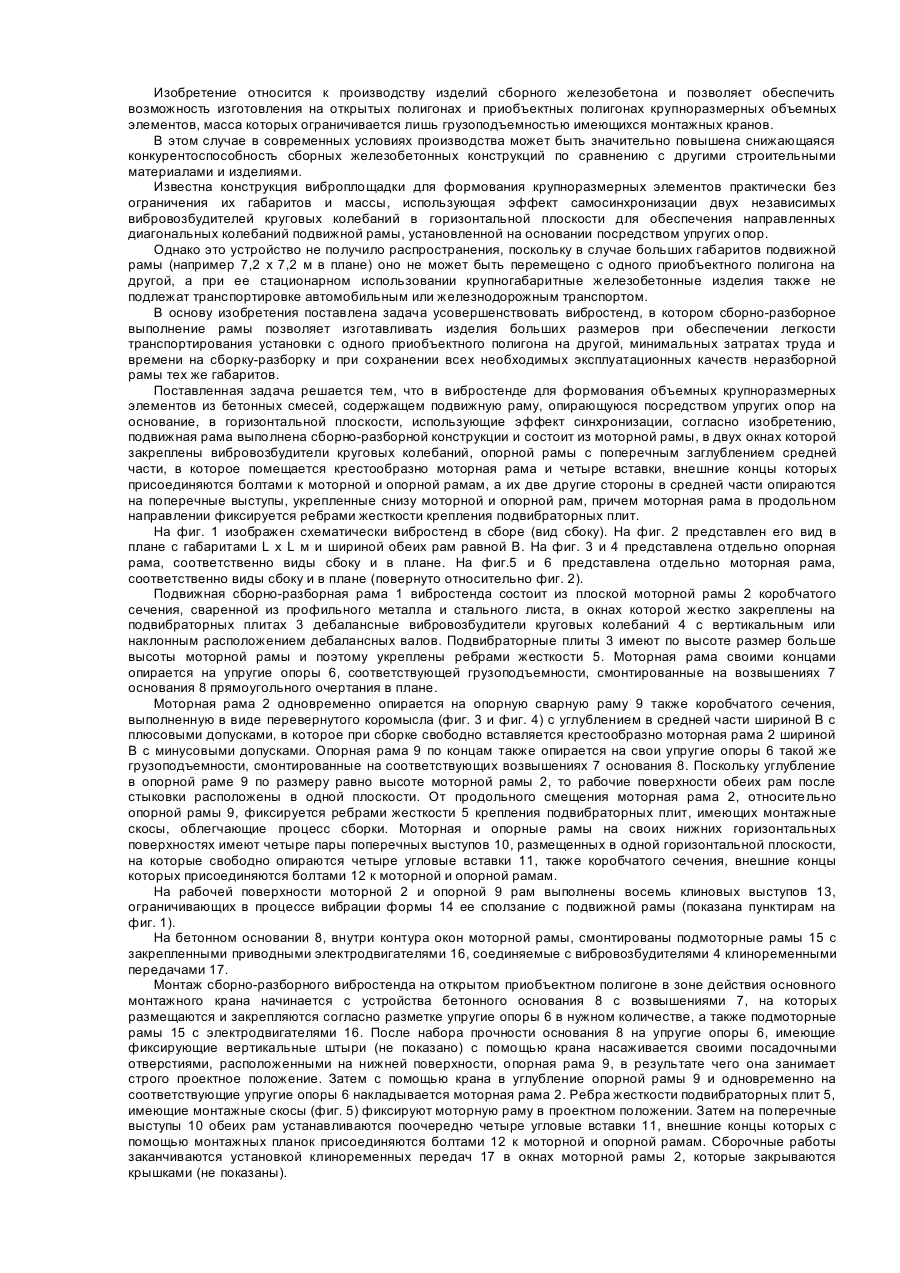
Вибростенд для формования объемных крупноразмерных элементов из бетонных смесей, содержащий подвижную раму, опирающуюся посредством упругих опор па основание и вибровозбудители круговых колебаний в горизонтальной плоскости, использующие эффект самосинхронизации, отличающийся тем, что его подвижная выполнена сборно-разборной конструкции и составлена из моторной рамы с вибровозбудителями, смонтированными в ее окнах, опорной рамы с...
Калібрувальний вібростенд
Номер патенту: 352
Опубліковано: 30.04.1993
Автори: Філіпов Вячеслав Миколайович, Шунайлов Андрій Генадійович, Цибулько Вадим Йосипович, Метельов Леонід Дмитрович, Квашин Михайло Федорович
Мітки: калібрувальний, вібростенд
Формула / Реферат:
1. Калибровочный вибростенд по авт. св. №1384922, отличающийся тем, что, с целью повышения точности воспроизведения виброперемещений, он снабжен двумя эксцентричными втулками с фиксаторами положения, установленными на цилиндрических поясках, которые выполнены на соответствующих втулках. С фланцем и двумя компенсационными эксцентриками, установленными на соответствующих эксцентричных втулках и контактирующими с соответствующими эксцентриками,...
Калібрувальний вібростенд
Номер патенту: 361
Опубліковано: 30.04.1993
Автори: Єгорова Віра Анатоліївна, Цибулько Вадим Йосипович, Рунов Борис Тихонович, Зорін Олександр Сергійович, Квашин Михайло Федорович
Мітки: вібростенд, калібрувальний
Формула / Реферат:
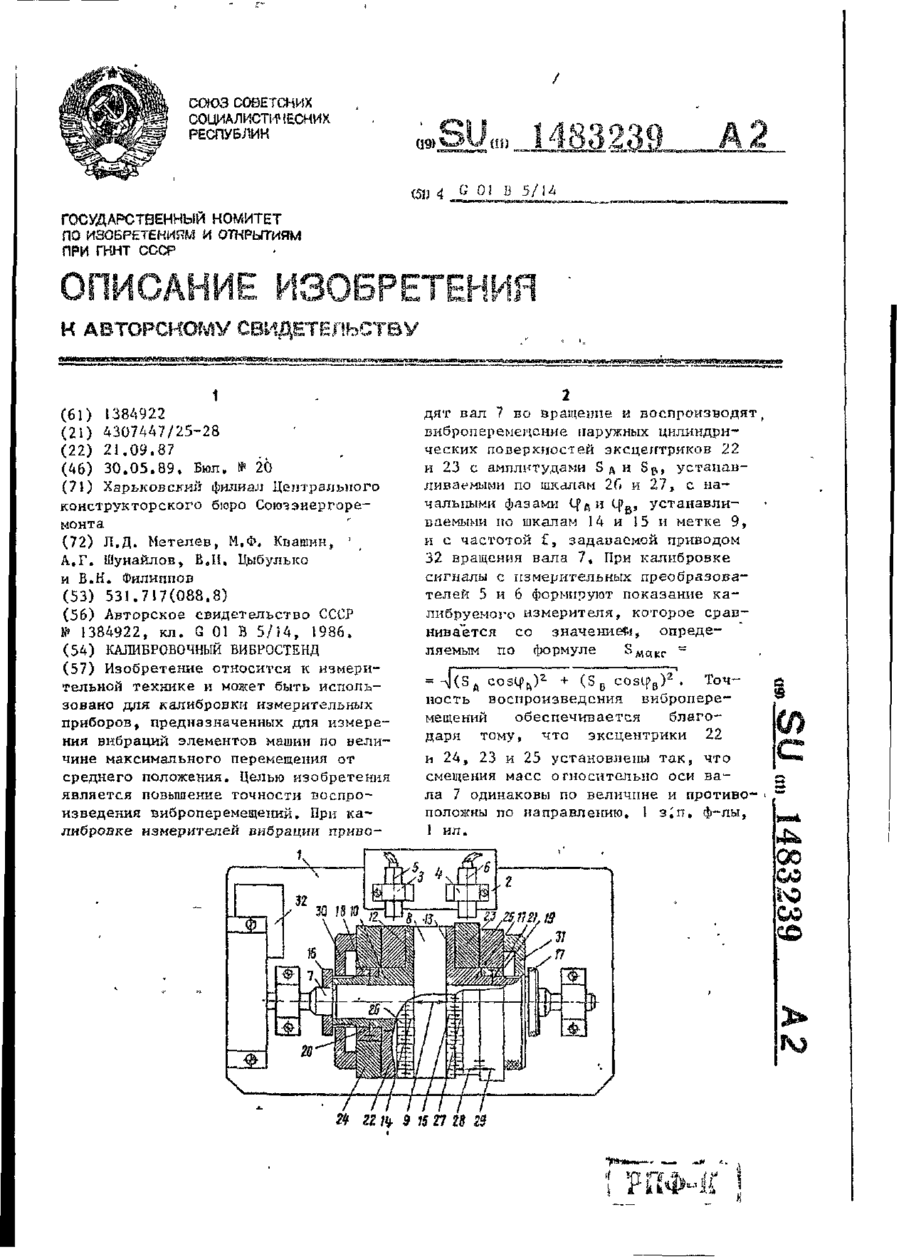
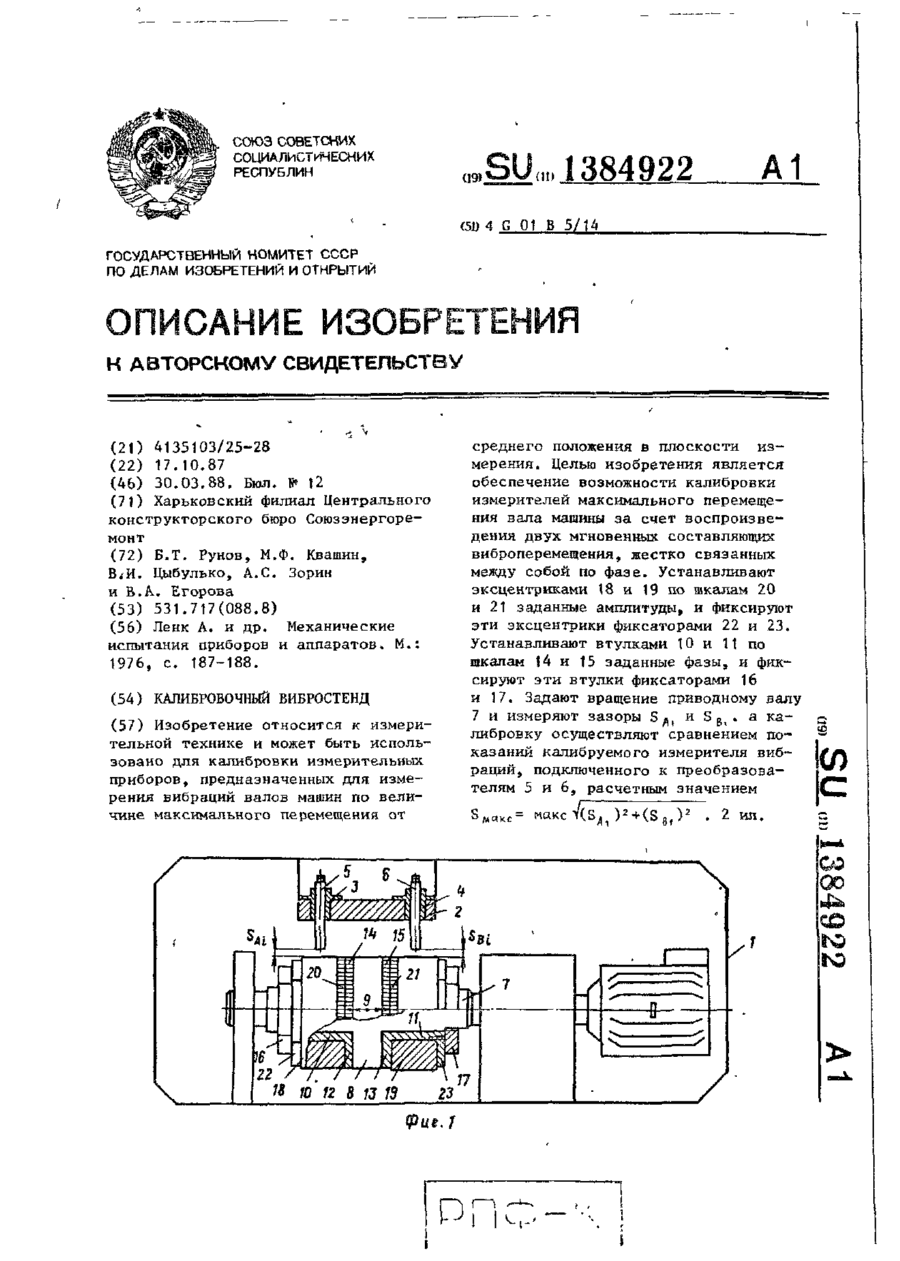
Формула изобретенияКалибровочный вибростенд, содержащий корпус, установленные на нем платформу с гнездом для крепления калибруемого измерительного преобразователя, приводной вал и связанный с ним эксцентриковый вибровозбудитель, отличающийся тем, что, с целью обеспечения возможности калибровки измерителей максимального перемещения вала машины, он снабжен дополнительным вибровозбудителем, идентичным основному, каждый из...
Двокоординатний вібростенд
Номер патенту: 5873
Опубліковано: 29.12.1994
Автори: Моргун Петро Васильович, Божко Олександр Євгенович, Гавеман Костянтин Андрійович, Блохін Анатолій Васильович, Шпачук Володимир Петрович, Левін Олександр Миколайович
Мітки: двокоординатний, вібростенд
Формула / Реферат:
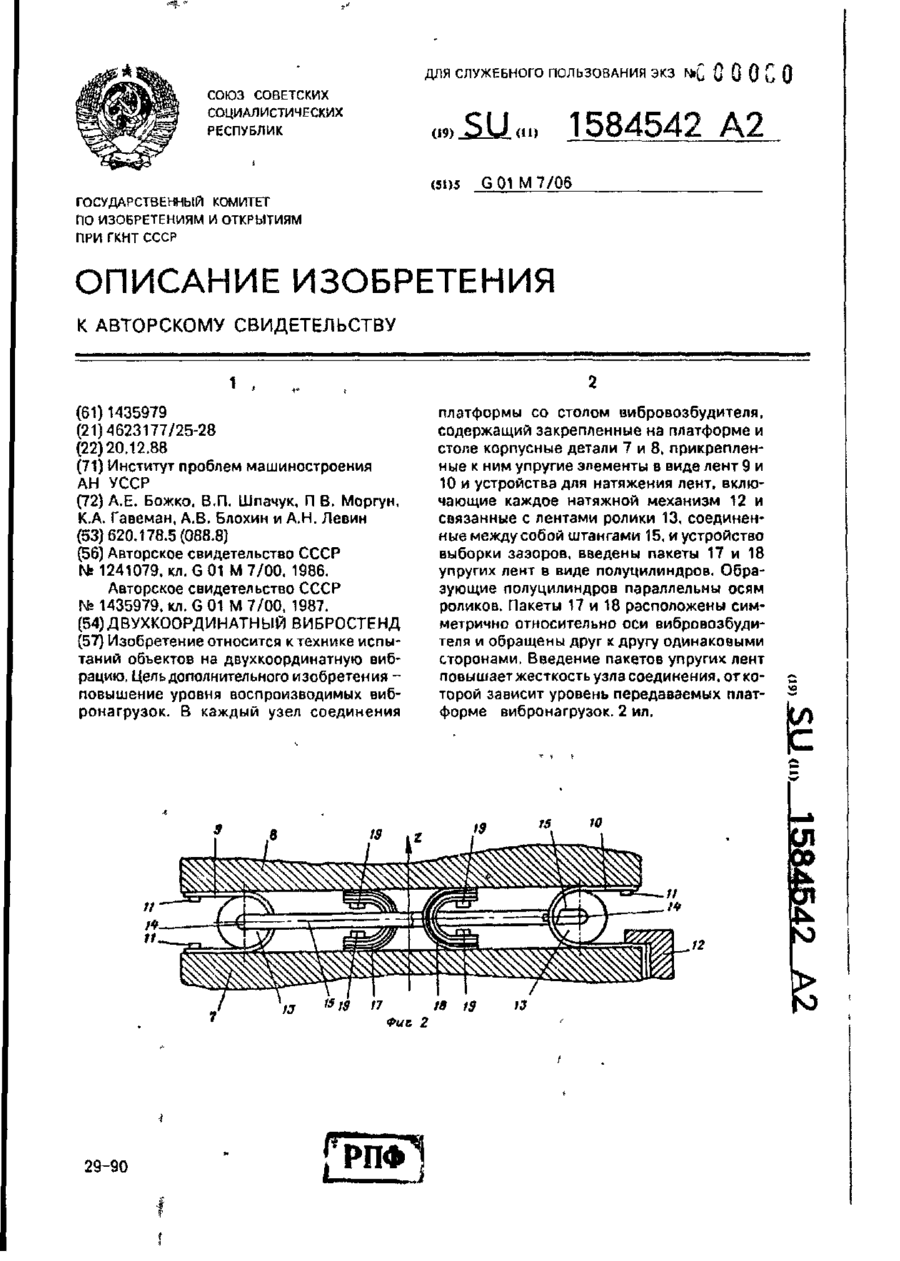
Двухкоординатный вибростенд по авт. св. СССР № 1435979, отличающийся тем, что, с целью повышения уровня воспроизводимых вибронагрузок, в каждый узел соединения платформы со столом вибровозбудителя введены прикрепленные к корпусным деталям пакеты упругих лент в виде полуцилиндров, образующие которых параллельны осям роликов, при этом пакеты упругих лент расположены симметрично относительно оси вибровозбудителя и обращены друг к другу...
Дво(три)координатний вібростенд
Номер патенту: 5875
Опубліковано: 29.12.1994
Автори: Моргун Петро Васильович, Шпачук Володимир Петрович, Попов Борис Семенович, Приходько Олег Борисович, Блохін Анатолій Васильович, Божко Олександр Євгенович, Левін Олександр Миколайович
МПК: G01M 7/00
Мітки: дво(три)координатний, вібростенд
Формула / Реферат:
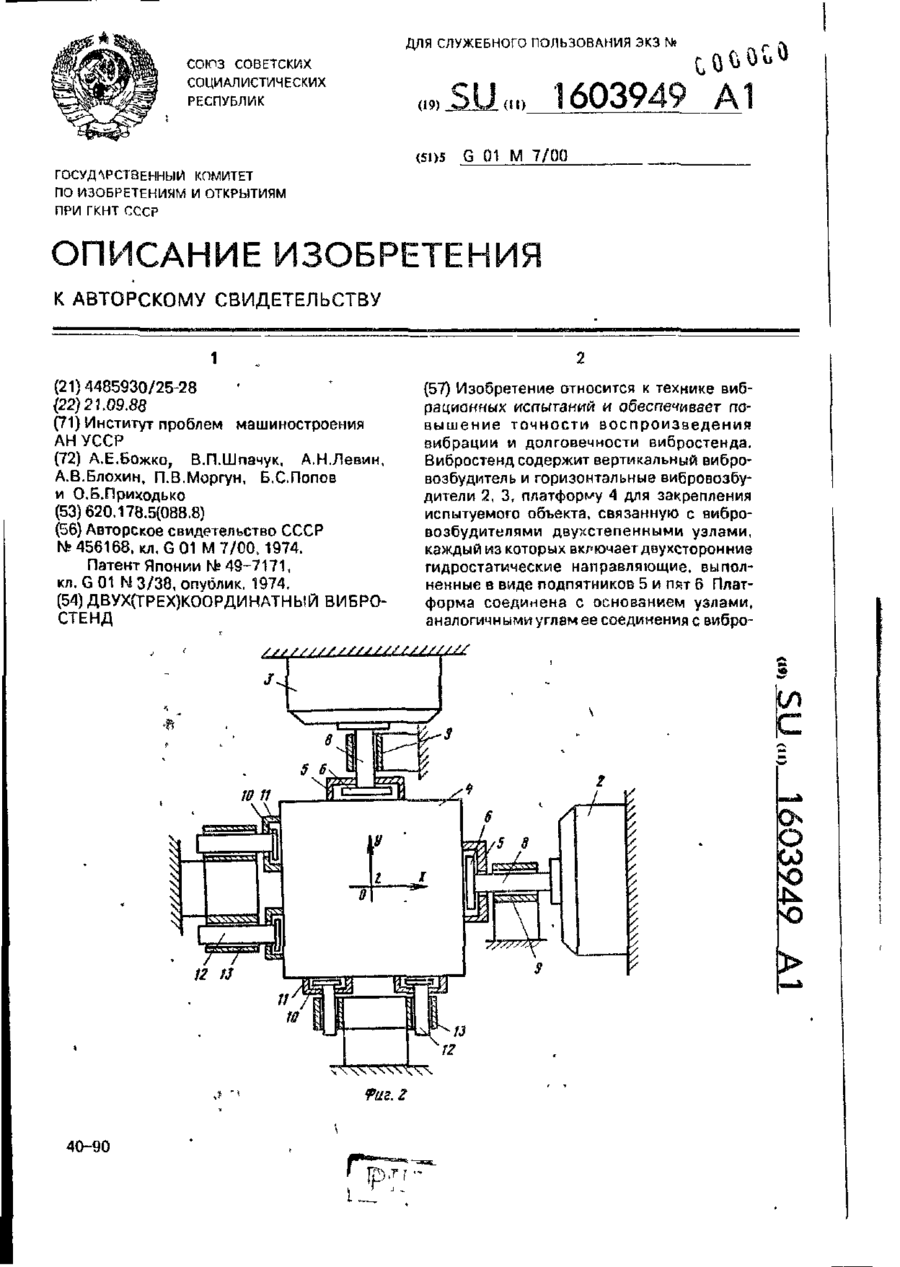
Двух (трех) координатный вибростенд, содержащий основание, установленные на нем по взаимно перпендикулярным направлениям вертикальный и горизонтальные вибровозбудители, платформу для закрепления испытуемого объекта и двухстепенные узлы соединения платформы с вибровозбудителями, каждый из которых включает двухсторонние гидростатические направляющие, выполненные в виде подпятника и пяты, размещенной между поверхностями скольжения...
Попередній патент: Пристрій для дугового зварювання
Наступний патент: Двочерв’ячний прес
Випадковий патент: Спосіб одержання тетраплоїдної форми кавуна