Система контролю просторового положення елементів даху інженерної споруди
Номер патенту: 45310
Опубліковано: 10.11.2009
Автори: Буравльов Євгеній Павлович, Малік Тетяна Миколаївна, Нерус Олександр Володимирович, Бурачек Всеволод Германович
Формула / Реферат
Система контролю просторового положення елементів даху інженерної споруди, що складається з опорних знаків і деформаційних марок з посадочними майданчиками, на яких встановлені подвійні фотоелектричні ланцюжки (ПФЕЛ), яка відрізняється тим, що ПФЕЛ виконані як просторова геодезична мережа у вигляді прямокутників у вертикальних площинах, які розміщуються по контуру (периметру) споруди, при цьому горизонтальні ПФЕЛ встановлені на рівні основи даху і на рівні фундаменту споруди, вертикальні ПФЕЛ виконані загальними для сусідніх прямокутників, а в кожному кутку геометричної фігури даної просторової геодезичної мережі встановлена деформаційна марка, на посадочному пристрої якої жорстко закріплено триканальний оптико-електронний пристрій з джерелами світла і включений в систему як єднальний пристрій суміжних горизонтальних ПФЕЛ і загального вертикального ПФЕЛ.
Текст
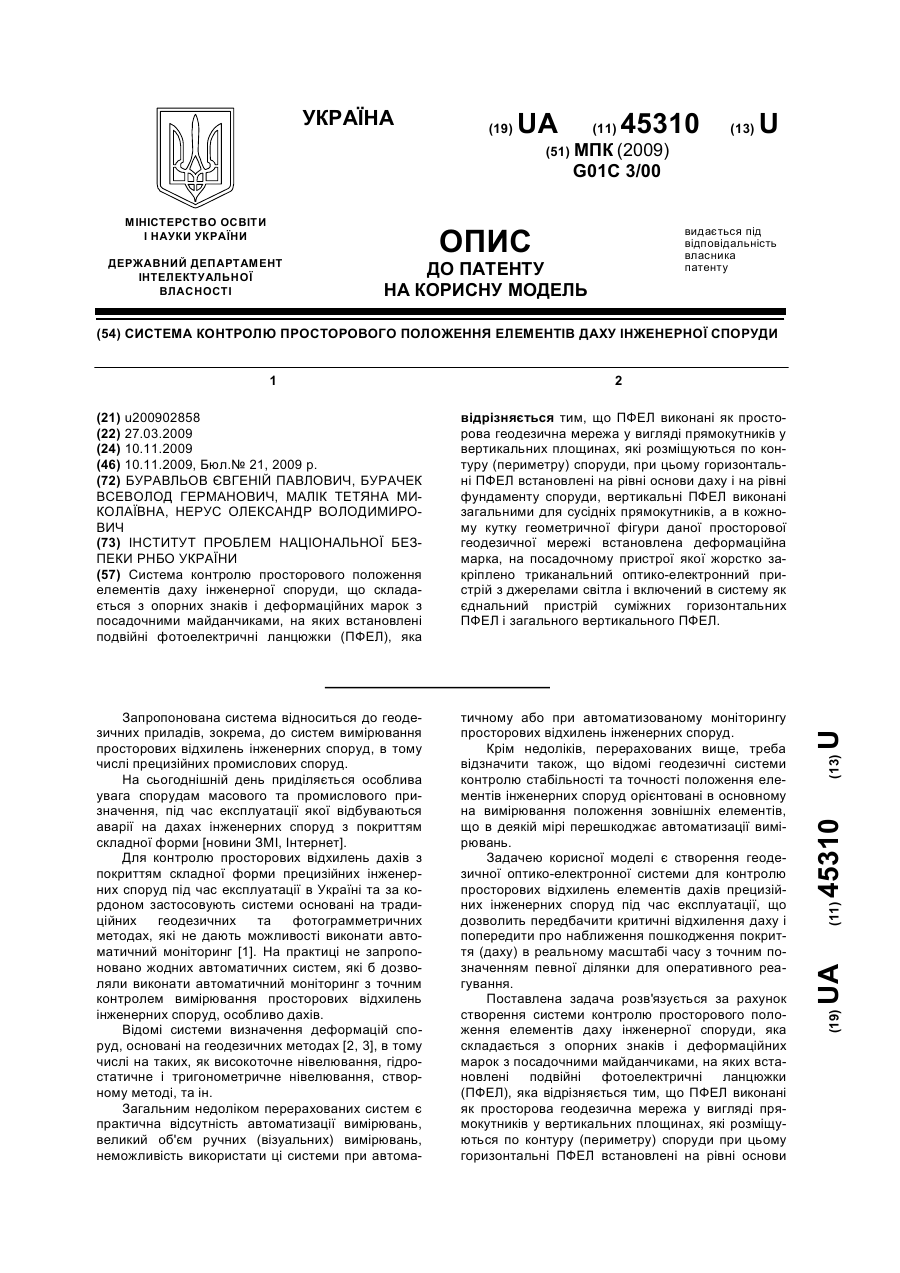
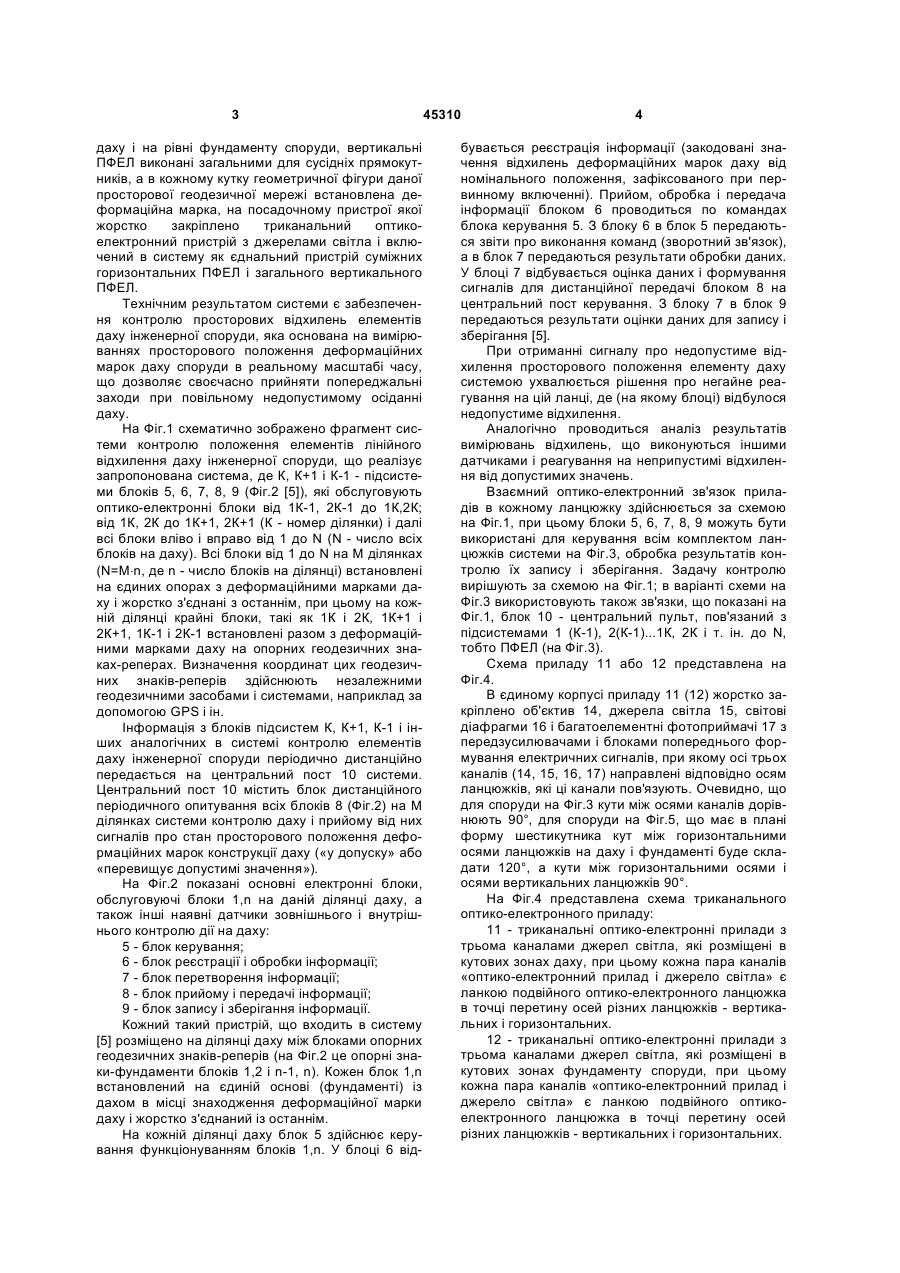
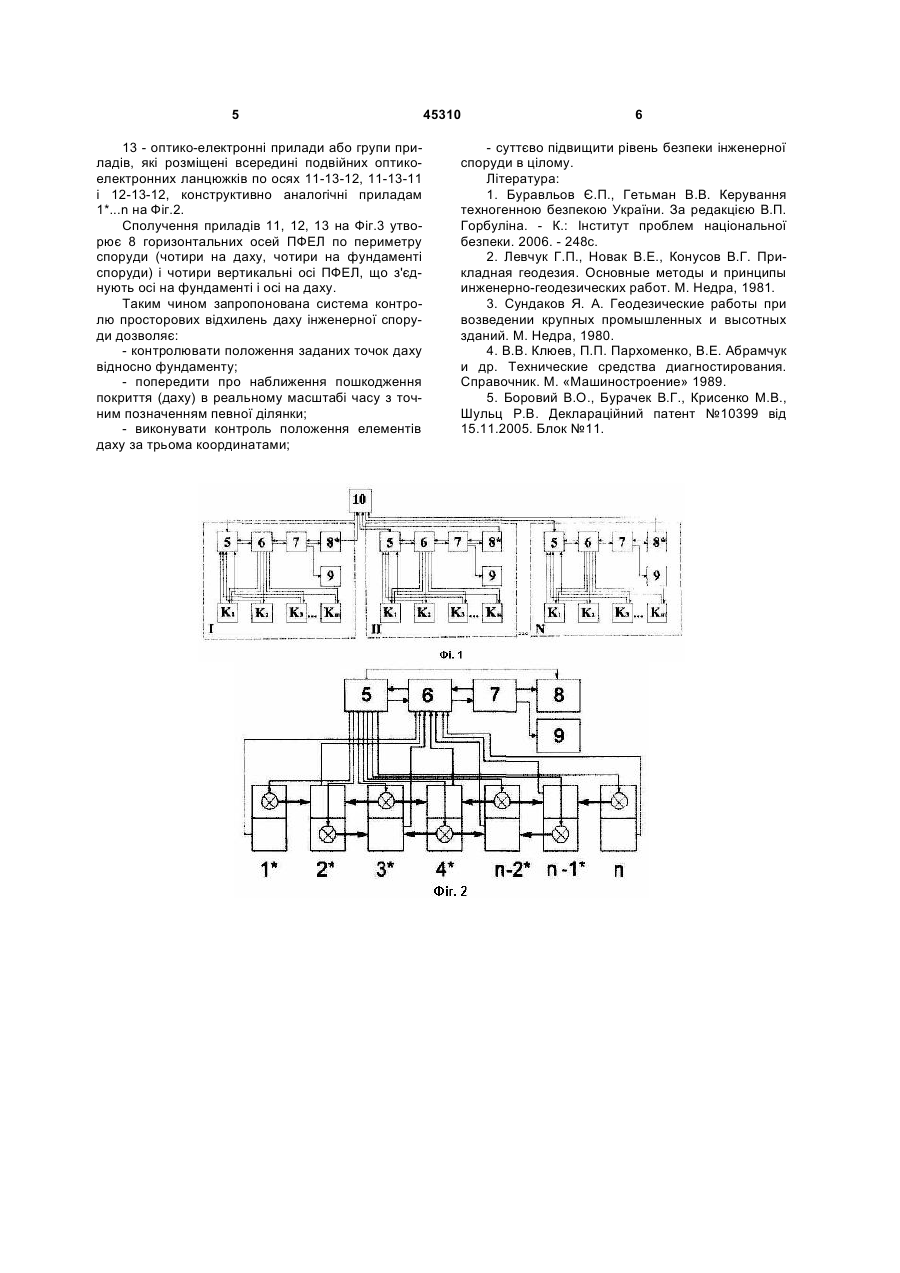
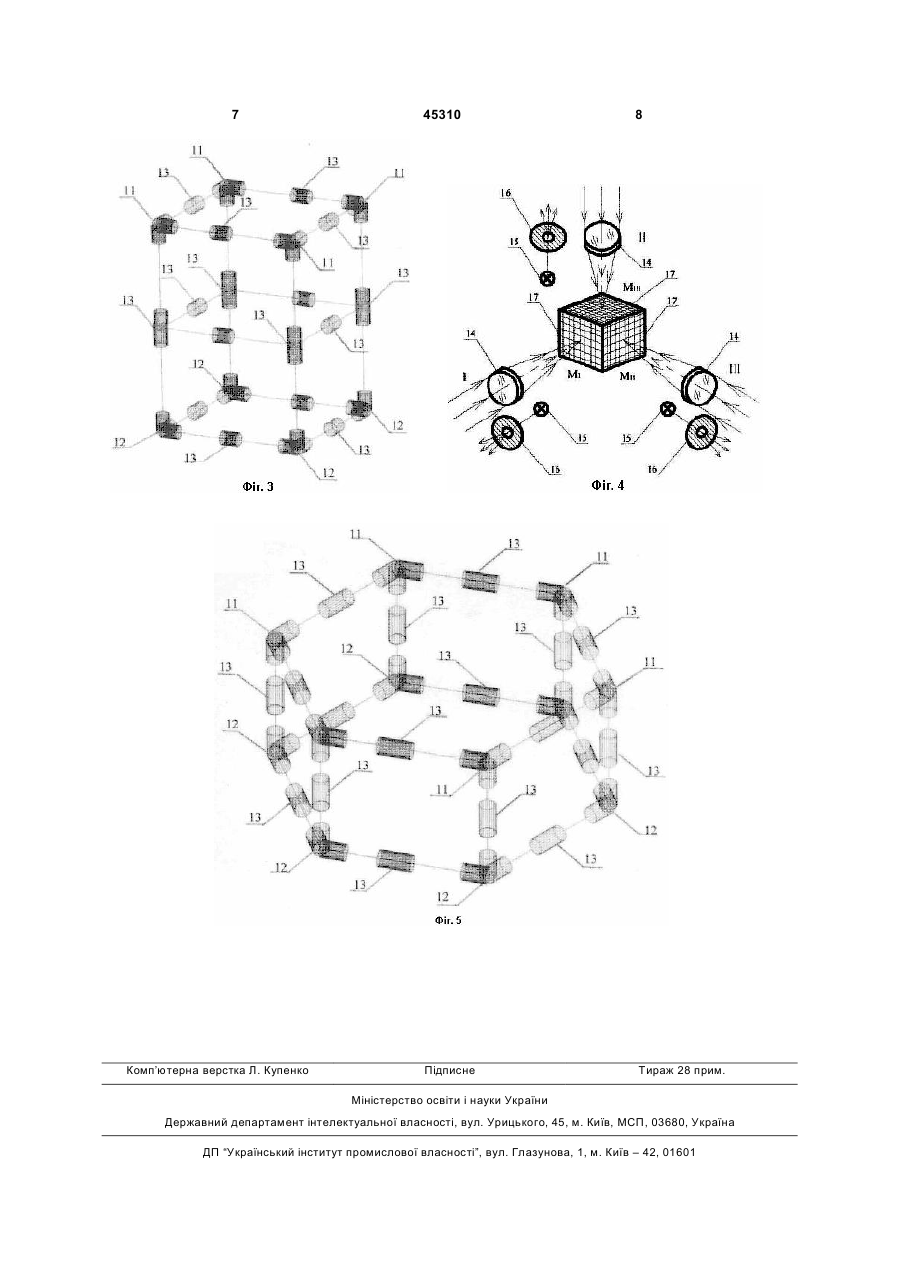
Система контролю просторового положення елементів даху інженерної споруди, що складається з опорних знаків і деформаційних марок з посадочними майданчиками, на яких встановлені подвійні фотоелектричні ланцюжки (ПФЕЛ), яка 3 даху і на рівні фундаменту споруди, вертикальні ПФЕЛ виконані загальними для сусідніх прямокутників, а в кожному кутку геометричної фігури даної просторової геодезичної мережі встановлена деформаційна марка, на посадочному пристрої якої жорстко закріплено триканальний оптикоелектронний пристрій з джерелами світла і включений в систему як єднальний пристрій суміжних горизонтальних ПФЕЛ і загального вертикального ПФЕЛ. Технічним результатом системи є забезпечення контролю просторових відхилень елементів даху інженерної споруди, яка основана на вимірюваннях просторового положення деформаційних марок даху споруди в реальному масштабі часу, що дозволяє своєчасно прийняти попереджальні заходи при повільному недопустимому осіданні даху. На Фіг.1 схематично зображено фрагмент системи контролю положення елементів лінійного відхилення даху інженерної споруди, що реалізує запропонована система, де К, К+1 і К-1 - підсистеми блоків 5, 6, 7, 8, 9 (Фіг.2 [5]), які обслуговують оптико-електронні блоки від 1К-1, 2К-1 до 1К,2К; від 1К, 2К до 1К+1, 2К+1 (К - номер ділянки) і далі всі блоки вліво і вправо від 1 до N (N - число всіх блоків на даху). Всі блоки від 1 до N на М ділянках (N=M×n, де n - число блоків на ділянці) встановлені на єдиних опорах з деформаційними марками даху і жорстко з'єднані з останнім, при цьому на кожній ділянці крайні блоки, такі як 1К і 2К, 1К+1 і 2К+1, 1К-1 і 2К-1 встановлені разом з деформаційними марками даху на опорних геодезичних знаках-реперах. Визначення координат цих геодезичних знаків-реперів здійснюють незалежними геодезичними засобами і системами, наприклад за допомогою GPS і ін. Інформація з блоків підсистем К, К+1, К-1 і інших аналогічних в системі контролю елементів даху інженерної споруди періодично дистанційно передається на центральний пост 10 системи. Центральний пост 10 містить блок дистанційного періодичного опитування всіх блоків 8 (Фіг.2) на М ділянках системи контролю даху і прийому від них сигналів про стан просторового положення деформаційних марок конструкції даху («у допуску» або «перевищує допустимі значення»). На Фіг.2 показані основні електронні блоки, обслуговуючі блоки 1,n на даній ділянці даху, а також інші наявні датчики зовнішнього і внутрішнього контролю дії на даху: 5 - блок керування; 6 - блок реєстрації і обробки інформації; 7 - блок перетворення інформації; 8 - блок прийому і передачі інформації; 9 - блок запису і зберігання інформації. Кожний такий пристрій, що входить в систему [5] розміщено на ділянці даху між блоками опорних геодезичних знаків-реперів (на Фіг.2 це опорні знаки-фундаменти блоків 1,2 і n-1, n). Кожен блок 1,n встановлений на єдиній основі (фундаменті) із дахом в місці знаходження деформаційної марки даху і жорстко з'єднаний із останнім. На кожній ділянці даху блок 5 здійснює керування функціонуванням блоків 1,n. У блоці 6 від 45310 4 бувається реєстрація інформації (закодовані значення відхилень деформаційних марок даху від номінального положення, зафіксованого при первинному включенні). Прийом, обробка і передача інформації блоком 6 проводиться по командах блока керування 5. З блоку 6 в блок 5 передаються звіти про виконання команд (зворотний зв'язок), а в блок 7 передаються результати обробки даних. У блоці 7 відбувається оцінка даних і формування сигналів для дистанційної передачі блоком 8 на центральний пост керування. З блоку 7 в блок 9 передаються результати оцінки даних для запису і зберігання [5]. При отриманні сигналу про недопустиме відхилення просторового положення елементу даху системою ухвалюється рішення про негайне реагування на цій ланці, де (на якому блоці) відбулося недопустиме відхилення. Аналогічно проводиться аналіз результатів вимірювань відхилень, що виконуються іншими датчиками і реагування на неприпустимі відхилення від допустимих значень. Взаємний оптико-електронний зв'язок приладів в кожному ланцюжку здійснюється за схемою на Фіг.1, при цьому блоки 5, 6, 7, 8, 9 можуть бути використані для керування всім комплектом ланцюжків системи на Фіг.3, обробка результатів контролю їх запису і зберігання. Задачу контролю вирішують за схемою на Фіг.1; в варіанті схеми на Фіг.3 використовують також зв'язки, що показані на Фіг.1, блок 10 - центральний пульт, пов'язаний з підсистемами 1 (К-1), 2(К-1)...1К, 2К і т. ін. до N, тобто ПФЕЛ (на Фіг.3). Схема приладу 11 або 12 представлена на Фіг.4. В єдиному корпусі приладу 11 (12) жорстко закріплено об'єктив 14, джерела світла 15, світові діафрагми 16 і багатоелементні фотоприймачі 17 з передзусилювачами і блоками попереднього формування електричних сигналів, при якому осі трьох каналів (14, 15, 16, 17) направлені відповідно осям ланцюжків, які ці канали пов'язують. Очевидно, що для споруди на Фіг.3 кути між осями каналів дорівнюють 90°, для споруди на Фіг.5, що має в плані форму шестикутника кут між горизонтальними осями ланцюжків на даху і фундаменті буде складати 120°, а кути між горизонтальними осями і осями вертикальних ланцюжків 90°. На Фіг.4 представлена схема триканального оптико-електронного приладу: 11 - триканальні оптико-електронні прилади з трьома каналами джерел світла, які розміщені в кутових зонах даху, при цьому кожна пара каналів «оптико-електронний прилад і джерело світла» є ланкою подвійного оптико-електронного ланцюжка в точці перетину осей різних ланцюжків - вертикальних і горизонтальних. 12 - триканальні оптико-електронні прилади з трьома каналами джерел світла, які розміщені в кутових зонах фундаменту споруди, при цьому кожна пара каналів «оптико-електронний прилад і джерело світла» є ланкою подвійного оптикоелектронного ланцюжка в точці перетину осей різних ланцюжків - вертикальних і горизонтальних. 5 13 - оптико-електронні прилади або групи приладів, які розміщені всередині подвійних оптикоелектронних ланцюжків по осях 11-13-12, 11-13-11 і 12-13-12, конструктивно аналогічні приладам 1*...n на Фіг.2. Сполучення приладів 11, 12, 13 на Фіг.3 утворює 8 горизонтальних осей ПФЕЛ по периметру споруди (чотири на даху, чотири на фундаменті споруди) і чотири вертикальні осі ПФЕЛ, що з'єднують осі на фундаменті і осі на даху. Таким чином запропонована система контролю просторових відхилень даху інженерної споруди дозволяє: - контролювати положення заданих точок даху відносно фундаменту; - попередити про наближення пошкодження покриття (даху) в реальному масштабі часу з точним позначенням певної ділянки; - виконувати контроль положення елементів даху за трьома координатами; 45310 6 - суттєво підвищити рівень безпеки інженерної споруди в цілому. Література: 1. Буравльов Є.П., Гетьман В.В. Керування техногенною безпекою України. За редакцією В.П. Горбуліна. - К.: Інститут проблем національної безпеки. 2006. - 248с. 2. Левчук Г.П., Новак В.Е., Конусов В.Г. Прикладная геодезия. Основные методы и принципы инженерно-геодезических работ. М. Недра, 1981. 3. Сундаков Я. А. Геодезические работы при возведении крупных промышленных и высотных зданий. М. Недра, 1980. 4. В.В. Клюев, П.П. Пархоменко, В.Е. Абрамчук и др. Технические средства диагностирования. Справочник. М. «Машиностроение» 1989. 5. Боровий В.О., Бурачек В.Г., Крисенко М.В., Шульц Р.В. Деклараційний патент №10399 від 15.11.2005. Блок №11. 7 Комп’ютерна верстка Л. Купенко 45310 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of control of spatial position of roof elements of engineering construction
Автори англійськоюBuravliov Yevhenii Pavlovych, Burachek Vsevolod Hermanovych, Malik Tetiana Mykolaivna, Nerus Oleksandr Volodymyrovych
Назва патенту російськоюСистема контроля пространственного положения элементов крыши инженерного сооружения
Автори російськоюБуравлев Евгений Павлович, Бурачек Всеволод Германович, Малик Татьяна Николаевна, Нерус Александр Владимирович
МПК / Мітки
МПК: G01C 3/00
Мітки: контролю, інженерної, споруди, система, положення, даху, просторового, елементів
Код посилання
<a href="https://ua.patents.su/4-45310-sistema-kontrolyu-prostorovogo-polozhennya-elementiv-dakhu-inzhenerno-sporudi.html" target="_blank" rel="follow" title="База патентів України">Система контролю просторового положення елементів даху інженерної споруди</a>
Пристрій для контролю положення елементів інженерної споруди
Номер патенту: 82247
Опубліковано: 25.03.2008
Автори: Рябчій Владислав Валерійович, Боровий Валентин Олександрович, Крисенко Максим Вікторович, Бурачек Всеволод Германович, Шульц Роман Володимирович
МПК: G01C 5/00
Мітки: споруди, інженерної, положення, контролю, елементів, пристрій
Формула / Реферат:
1. Пристрій для контролю положення елементів інженерної споруди, який містить фотоелектричні канали з джерелами світла, об'єктивами, багатоелементними фотоприймачами, що утворюють фотоелектричний ланцюжок, елементи ланцюжка змонтовані в блоках, які жорстко встановлені на споруді, причому джерела світла електрично сполучені з генераторним блоком, багатоелементні фотоприймачі електрично сполучені з блоком комутації, генераторний блок та блок...
Пристрій контролю точності положення елементів інженерної споруди
Номер патенту: 16630
Опубліковано: 15.08.2006
Автори: Шульц Роман Володимирович, Бурачек Всеволод Германович, Рябчій Владислав Валерійович, Крисенко Максим Вікторович, Боровий Валентин Олександрович
МПК: G02B 13/08
Мітки: інженерної, точності, положення, контролю, елементів, споруди, пристрій
Формула / Реферат:
Пристрій для контролю точності положення елементів інженерної споруди, який містить фотоелектричні канали з елементами: джерела світла, об'єктиви, багатоелементні фотоприймачі, що створюють подвійний фотоелектричний ланцюжок, а також захисні світлопроводи з діафрагмами, який відрізняється тим, що всі елементи змонтовані і жорстко встановлені в блоках, кожний з яких містить здвоєний багатоелементний фотоприймач і два об'єктиви, які утворюють...
Система контролю просторового положення елементів конструкцій магістральних нафтогазопроводів
Номер патенту: 84605
Опубліковано: 10.11.2008
Автори: Буравлев Євгеній Павлович, Боровий Валентин Олександрович, Крисенко Максим Вікторович, Бурачек Всеволод Германович
МПК: G01C 5/00
Мітки: просторового, конструкцій, контролю, нафтогазопроводів, положення, система, магістральних, елементів
Формула / Реферат:
Система контролю просторового положення елементів конструкцій магістральних нафтогазопроводів, що містить подвійний оптико-електричний ланцюжок, розміщений на конструкції, пристрої оптико-електричного ланцюжка розміщені в блоках, які жорстко закріплені на конструкції та електрично з'єднані з електронними блоками - блоком керування, блоком обробки інформації та блоком запису і збереження інформації, яка відрізняється тим, що подвійний...
Спосіб контролю стабільності положення елементів споруди
Номер патенту: 79458
Опубліковано: 25.06.2007
Автори: Шульц Роман Володимирович, Бурачек Всеволод Германович, Боровий Валентин Олександрович
МПК: G01C 5/00
Мітки: положення, споруди, спосіб, контролю, стабільності, елементів
Формула / Реферат:
Спосіб контролю стабільності положення елементів протяжної (лінійної) споруди, оснований на фотоелектричному вимірі величини зсуву елемента споруди, який відрізняється тим, що в ньому фотоелектрично вимірюють зміну ситуації в n вимірювальних каналах, пов'язаних між собою послідовно із чергуванням напрямку світлового потоку на 180°, і визначають номер нестабільного елемента в кожному каналі за сукупністю результатів в даному каналі і двох...
Спосіб контролю точності положення елементів споруди
Номер патенту: 80875
Опубліковано: 12.11.2007
Автори: Бойко Ігор Петрович, Бурачек Всеволод Германович, Шульц Роман Володимирович, Крисенко Максим Вікторович, Боровий Валентин Олександрович
МПК: G01C 5/00
Мітки: спосіб, контролю, положення, споруди, точності, елементів
Формула / Реферат:
Спосіб контролю положення елементів споруди шляхом фотоелектричного виміру відхилень елементів споруди за допомогою фотоелектричного ланцюжка, утвореного каналами, що містять джерела світла, лінзи-об'єктиви та фотоприймачі, який відрізняється тим, що виміри величин відхилень елементів споруди виконують одночасно не менш ніж у двох однотипних фотоелектричних ланцюжках, в яких суміжні канали працюють у взаємно протилежних напрямках світлового...
Попередній патент: Спосіб виготовлення тристулкового кондуїту для реконструкції вихідного тракту правого шлуночка
Наступний патент: Спосіб контролю просторового положення елементів даху інженерної споруди
Випадковий патент: Пристрій для виготовлення, наповнення продуктом и запечатування пакетів із матеріалу, який містить термопластик