Спосіб контролю точності положення елементів споруди
Номер патенту: 80875
Опубліковано: 12.11.2007
Автори: Бурачек Всеволод Германович, Бойко Ігор Петрович, Боровий Валентин Олександрович, Шульц Роман Володимирович, Крисенко Максим Вікторович
Формула / Реферат
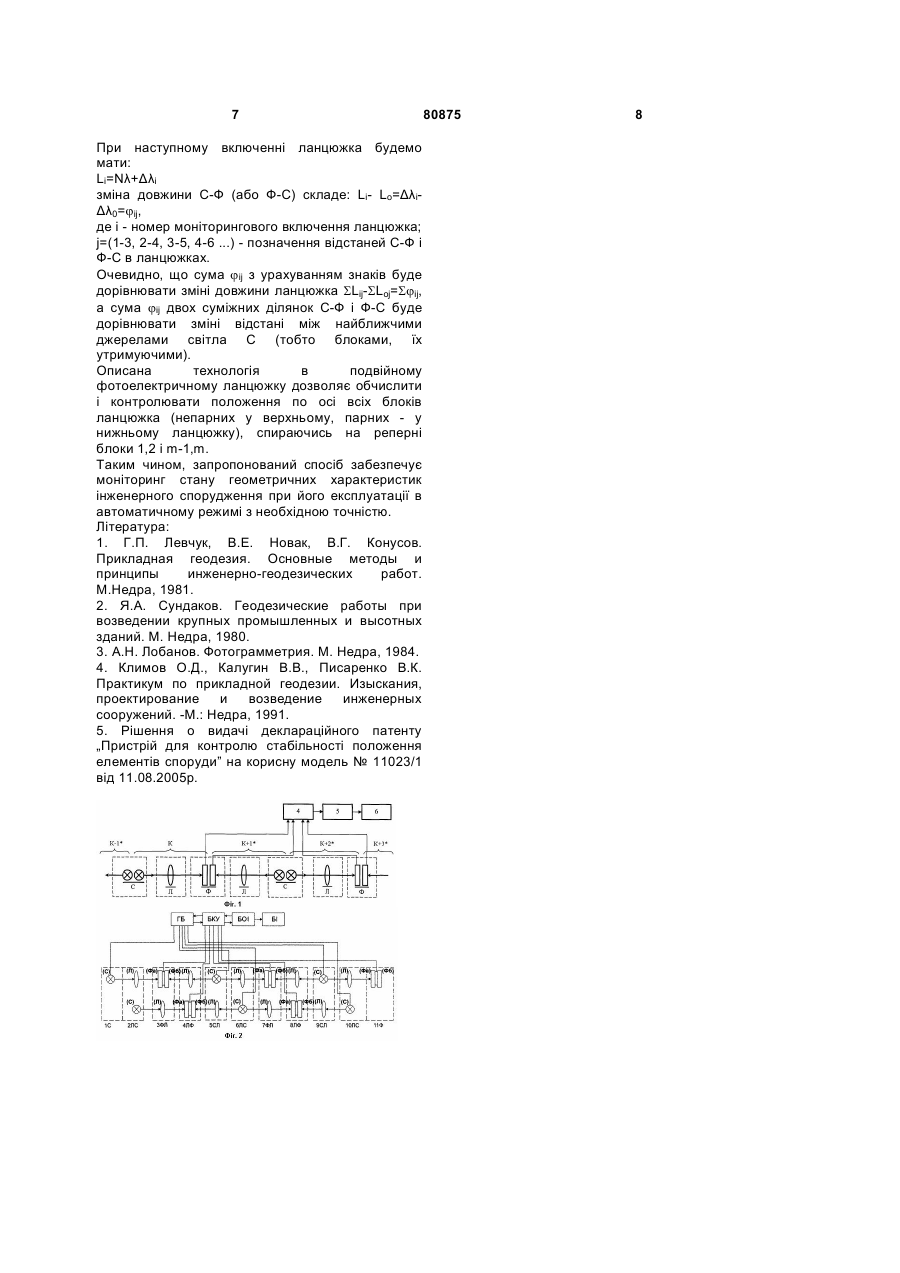
Спосіб контролю положення елементів споруди шляхом фотоелектричного виміру відхилень елементів споруди за допомогою фотоелектричного ланцюжка, утвореного каналами, що містять джерела світла, лінзи-об'єктиви та фотоприймачі, який відрізняється тим, що виміри величин відхилень елементів споруди виконують одночасно не менш ніж у двох однотипних фотоелектричних ланцюжках, в яких суміжні канали працюють у взаємно протилежних напрямках світлового потоку, при цьому елементи фотоелектричних ланцюжків жорстко закріплені на елементах споруди і розміщені зі зсувом на один крок ланцюжка відносно один одного, отримані дані вимірювань порівнюють з номінальними і за цими даними оцінюють відхилення елементів споруди відносно вибраних в ланцюжках пар опорних геодезичних знаків з відомими координатами.
Текст
Спосіб контролю положення елементів споруди шляхом фотоелектричного виміру відхилень елементів споруди за допомогою фотоелектричного ланцюжка, утвореного каналами, що містять джерела світла, лінзиоб'єктиви та фотоприймачі, який відрізняється тим, що виміри величин відхилень елементів споруди виконують одночасно не менш ніж у двох однотипних фотоелектричних ланцюжках, в яких суміжні канали працюють у взаємно протилежних напрямках світлового потоку, при цьому елементи фотоелектричних ланцюжків жорстко закріплені на елементах споруди і розміщені зі зсувом на один крок ланцюжка відносно один одного, отримані дані вимірювань порівнюють з номінальними і за цими даними оцінюють відхилення елементів споруди відносно вибраних в ланцюжках пар опорних геодезичних знаків з відомими координатами. Винахід відноситься до галузі геодезії, зокрема, до способів геодезичного контролю деформації споруд. Відомі засоби визначення деформацій споруд, основані на геодезичних методах [1], а саме методах високоточного нівелювання [2], гідростатичного і тригонометричного нівелювання, фотограмметричними методами [3], методом теодолітного ходу [4]. Загальним недоліком перерахованих засобів є практична відсутність автоматизації вимірювань, великий об'єм ручних (візуальних) вимірювань, неможливість використати ці методи при автоматичному або при автоматизованому моніторингу споруди. В якості аналогу запропонованого способу приймається пристрій високоточного нівелювання для вимірювання осадок споруд [2], який можна прийняти за прототип. Крім недоліків, перерахованих вище, треба відзначити також, що відомі геодезичні засоби контролю стабільності та точності положення споруд орієнтовані в основному на вимірювання положення зовнішніх елементів, що в деякій мірі перешкоджає автоматизації вимірювань. Задачею винаходу є створення способу контролю точності положення елементів споруд, який позволить автоматизувати процес контролю визначення координат елементів інженерної споруди з високою точністю в режимі автоматичного моніторингу споруди. Поставлена задача розв'язується за рахунок створення нового способу контролю точності положення елементів спорудження, заснований на фотоелектричному вимірі відхилень елементів спорудження в режимі фотоелектричного ланцюжка з вимірюваних елементів (джерело світла, лінза-об'єктив, фотоприймач, лінзаоб'єктив, джерело світла і т.д.), який відрізняється (19) UA (11) 80875 (13) C2 (21) a200510573 (22) 09.11.2005 (24) 12.11.2007 (72) БОЙКО ІГОР ПЕТРОВИЧ, UA, БОРОВИЙ ВАЛЕНТИН ОЛЕКСАНДРОВИЧ, UA, БУРАЧЕК ВСЕВОЛОД ГЕРМАНОВИЧ, UA, КРИСЕНКО МАКСИМ ВІКТОРОВИЧ, UA, ШУЛЬЦ РОМАН ВОЛОДИМИРОВИЧ, UA (73) ЧЕРНІГІВСЬКИЙ ДЕРЖАВНИЙ ІНСТИТУТ ЕКОНОМІКИ ТА УПРАВЛІННЯ, UA (56) Сундаков Я.А. Геодезические работы при возведении крупных промышленных сооружений и высотных зданий. М.: Недра.- 1980. - C. 258-261, 320-321 RU 2213325 C1, 27.09.2003 SU 1439403 A1, 23.11.1988 SU 1213350 A, 23.02.1986 RU 2180430 C1, 10.03.2002 SU 1067353 A, 15.01.1984 JP 2004053437, 19.02.2004 3 тим, що виміри величин відхилень елементів спорудження виконують одночасно не менш чим у двох аналогічних фотоелектричних ланцюжках, при цьому створюють зсув вимірювальних елементів на один крок ланцюжка відносно один одного і по отриманим даним обчислюють величини відхилень елементів спорудження від номінальних, базуючись на парах елементів фотоелектричних «ланцюжків», визначених у якості вихідних геодезичних знаків. Аналіз опублікованих в літературі технічних рішень показав, що запропонований спосіб не був ніде описаний раніше, тому є новим технічним рішенням. Схема пристрою, яка реалізує можливість фіксування нестабільності елементів споруди і визначення номеру нестабільного елементу по його положенню в каналі відносно двох сусідніх каналів і вміщуючого в себе один ланцюжок з n фотоелектричних каналів представлена на фіг.1. [5] На схемі показано: (С) - подвійні джерела світла з конденсорами і діафрагмами; (Л) - лінзи (об'єктиви); (Ф) - подвійні багатоелементні фотоприймачі з попередніми підсилювачами; (БК) - блок комутації; (БОІ) - блок обробки інформації; (БІ) - блок індикації. Блоки (С), (Л), (Ф) в своїх корпусах жорстко встановлюють на настінні кронштейни-репери споруди по її периметру, при цьому підбирають відстані (С)-(Л), (Л)-(Ф) каналу К, (С)-(Л), (Л)-(Ф) каналу К+1* і т.д. рівними один до одного і подвійної фокусної відстані лінз (Л). Між блоками встановлені захисні світлопроводи. Таким чином, утворюється n фотоелектричних каналів, при цьому оптична вісь цього фотоелектричного "ланцюжка" горизонтальна (на фіг.1). На фіг.1 зображено фрагмент цього "ланцюжка": система фотоелектричних каналів К-1*, К, К+1*, К+2*, К+3*: С-Л-Ф-Л-С-Л-Ф. Елементи (С) і (Ф) є подвійними, жорстко закріплені на єдиних основах і працюють по взаємно-протилежним напрямках. (БК) - електронний блок комутації сигналів, що поступають з попередніх підсилювачів фотоприймальних каналів 1*...n, (БОI) - електронний блок обробки інформації; (БІ) - блок індикації. Блоки (БК), (БОI), (БІ) можуть бути встановлені в окремому приміщенні в споруді і пов'язані з фотоприймачами фотоелектричних каналів 1*...n кабельною мережею. Робота перерахованих елементів і блоків виконується наступним чином: В процесі здійснення моніторингу включення каналів може виконуватися з певною періодичністю, при цьому в кожному каналі світловий потік від джерела світла (позиція С на фіг.1) потрапляє на лінзу Л, яка фокусує світловий потік в робочій площині багатоелементного фотоприймача Ф в фотоелектричних каналах 1*...n. 80875 4 При зміні, наприклад висоти будь-якого елементу даного фотоелектричного “ланцюжка” буде мати місце неузгодженості в одному або в двох каналах. Наприклад: 1. При зміні положення джерела світла С будемо мати місце зміни відліку (неузгодженість) на фотоприймачі Ф цього каналу. Одночасно, так як фотоприймачі жорстко пов'язані виникає неузгодженість на фотоприймачі сусіднього каналу. Це дозволяє визначити величину зміни положення точки С. 2. При зміні положення лінзи Л змінюється відлік на фотоприймачі. Відліки на фотоприймачі суміжного каналу при цьому залишатимуться незмінними. Однозначно визначається зміна положення лінзи Л. 3. При зміні положення елемента Ф очевидно, що буде отримано зміну відліків на фотоприймачах і може бути однозначно визначено величину і напрямки відхилення елемента Ф. Таким же чином може бути в автоматичному режимі визначено відхилення від первісного положення інших елементів фотоелектричного “ланцюжка” по периметру споруди, при цьому може бути сформульовані критерії оцінки відхилень при одночасній зміні положення двох і більше елементів фотоелектричного “ланцюжка”. Запропонований спосіб К.Т.П.Є.С. повною мірою реалізується пристроєм, схема якого представлена на фіг.2, і представляє собою схему розташування блоків l...m подвійного фотоелектричного «ланцюжка». Номера блоків сформовані в такий спосіб: перша цифра порядковий номер блоку, перша літера - тип елемента першого (на фіг.2 верхнього) ланцюжка, друга літера -тип елемента в другому ланцюжку (С - джерело світла, Л - об'єктив, Φ -двосторонній багатоелементний фотоприймач), наприклад, 1C, 2ЛС, 3ФЛ і т.д. БК - блок комутації; БОІ - блок обробки інформації; БІ - блок індикації (комп'ютер); ГБ - генераторний блок БЗІ - блок запису і збереження інформації; Блоки 1...11 у своїх корпусах жорстко встановлюють на стінні кронштейни - репери спорудження по його периметру, при цьому підбирають відстані С-Л, Л-Φ, Ф-Л, Л-С, С-Л і т.д. рівними один одному і подвійній фокусній відстані лінз Л. У такий спосіб утвориться два ланцюжка фотоелектричних каналів, при цьому оптична вісь цього подвійного фотоелектричного «ланцюжка» рівнобіжна відповідній осі споруди. На фігурі 2 показаний фрагмент цього подвійного «ланцюжка». Елементи 1... 11... є подвійними, жорстко закріпленими на єдиних основах і утворюють фотоелектричні канали, що містять елементи С, Л, Ф при цьому суміжні канали в кожному окремому ланцюжку працюють по взаємо-протилежних напрямках світлового потоку. Електронний блок комутації БК приймає електричні сигнали, що надходять з попередніх підсилювачів фотоприймачів каналів кожного з одинарних ланцюжків. 5 Блоки БК, БОІ, БІ, ГБ, БЗІ можуть бути встановлені в окремому приміщенні в споруді і електричне зв'язані з фотоприймачами Φ і джерелами світла С фотоелектричних каналів кабельною мережею. Усі перераховані вище блоки БК...БЗІ одержують електроживлення від звичайної електромережі, при цьому блок БК через свій перетворювач забезпечує електроживлення багатоелементних фотоприймачів з попередніх підсилювачів. При включенні пристрою світлові потоки від джерел світла С падають на лінзи Л, що фокусують зображення джерел на мішенях фотоприймачів Ф. У фотоелектричних каналах двох фотоелектричних «ланцюжків» з фотоприймачів Φ в блок БК надходять електричні сигнали про величини відхилень зображень джерел світла від номінального положення, що введено в пам'ять пристрою (у блок БОІ) при первинному включенні подвійного ланцюжка. Розглянемо варіант пристрою, що працює в режимі автоматичного фотоелектричного нівелірного ходу, при цьому умовимося, що блоки 1C та 2ЛС, а також блоки 10ЛС і 11 Φ утворять систему опорних реперів з підвищеною стабільністю положення з відомими заздалегідь визначеними висотами блоків (у тому числі їхніх елементів) незалежним методом. Фотоприймачі здвоєних фотоелектричних ланцюжків на фіг.2 позначимо: (Фа) - у фотоелектричних каналах, де світловий потік спрямований ліворуч-праворуч, і (Фб) - де світловий потік спрямований праворучліворуч. У такий спосіб з фотоприймачів Φ в блок БК надходять сигнали неузгодженості від блоків 3ФЛ, 4ЛФ, 7ФЛ, 8ЛФ, 11Ф. Визначимо ці сигнали як wі (іа) та wі (іб). Величини неузгодженостей у каналах 1...11 без обліку випадкових погрішностей для ідеальної системи будуть рівні: w3 (3а)=-Δ1+2Δ2-Δ3 w3 (3б)=-D3+2D4-D5 w4(3а)=-D2+2D3-D4 w4 (3б)=-D4+2D5-D6 w7 (3а)=-D5+2D6-D7 (1) w7 (3б)=-Δ7+2Δ8-Δ9 w8 (3а)=-D6+2D7-D8 w8 (3б)=-Δ8+2Δ9-Δ10 w11(3а)=-D9+2D10-D11 Σw=-D11+D2 Як указувалося вище значення D1, D2, D10 і D11 є відомі величини, визначені для стабільних реперів-блоків 1-2 і 10-11. D3...Δ9 - значення відхилень від номінальних для блоків 3...9. З вираження (1) бачимо, що сума величин відносин блоків 3...9, які знімаються з фотоприймачів Φ дорівнює нулеві. У реальній системі кожне значення Δі буде містити випадкову погрішність δі, при цьому сума w3+w4+w7+w8+w11 для блоків 3...9 покаже нев'язання ΔΗ, що розподіляється між значеннями 80875 6 відхилень блоків 3...9 по висоті відповідно до методу, застосовуваному у геодезії. При реалізації моніторингу спорудження включення пристрою повторюють із заданою періодичністю, обчислюють величини відхилень блоків 3...9 по висоті і ведуть спостереження за станом спорудження, складаючи графіки його осідань по програмі, що мається в блоці БОІ. Блок БІ по сигналах блоку БОІ забезпечує оперативну індикацію результатів. Дані для запису і збереження з блоку БОІ направляють у блок БЗІ. Аналогічно описаному відбувається робота подвійного фотоелектричного «ланцюжка» у горизонтальній площині по напрямку осі у, перпендикулярної вертикальної площини, що проходить через вісь «ланцюжка». Описана технологія дозволяє визначити координати Υ і Ζ елементів подвійного ланцюжка від 3 до n-2 при відомих координатах опорних реперів 1,2, m і m-1. Положення елементів по ординаті Χ визначають у такий спосіб: На джерела світла С з блоку ГБ за командою блоку БКУ подається перемінний струм опорної частоти. При першому включенні «ланцюжка» на усіх фотоприймачах Фiа і Фiб будуть мати місце сигнали тієї ж частоти, що й опорна, але не співпадаючі з останньою по фазі. За допомогою фазометра, що знаходиться в блоці 5 виконують вимір різниці фаз сигналів, прийнятих фотоприймачами від джерел світла й опорного сигналу. Ці різниці вводяться в пам'ять блоку 5 як номінальні значення, що фіксують розташування відповідних елементів по осі X. При повторних включеннях нові різниці фаз порівнюють з номінальними і по цим даним оцінюють відхилення блоків 3...m-2по осі Χ щодо блоків 1, 2, n-1 i n. При зміні напрямку осі Χ на 90° (наприклад, при прямокутній формі спорудження) відповідно в блоці 5 враховують знаки і величини відхилень для нової орієнтації осі фотоелектричного «ланцюжка». Для кожної відстані С-Ф, Ф-С по різниці фаз сигналів опорного і прийнятого на мішені фотоприймача Ф, переданих від останнього в блок БК і потім у блок БОI, що містить фазометричний механізм, визначають лінійну величину доповнення до сумарної довжини цілого числа хвиль коливань джерела світла С (коливань опорного сигналу). При першому (еталонному) включенні ці величини для усіх відстаней С-Ф і ФС ланцюжка вводять у пам'ять блоку БОI як номінальні. При повторному включенні в блоці БОI фіксують зміну цих лінійних величин для кожного С-Ф і Ф-С. Відстань С-Ф або Ф-С буде дорівнювати L= Νl+Dl0, 0 де Ν - ціле число довжини хвиль опорного сигналу; λ - довжина хвилі О.С.; Δλ0 - доповнення в довжині С-Ф (Ф-С) до суми цілого числа довжин хвиль при першому (еталонному) включенні, введене в пам'ять блоку БОI. 7 При наступному включенні ланцюжка будемо мати: Li= Νλ+Δλi зміна довжини С-Ф (або Ф-С) складе: Li- Lo=ΔλiΔλ0=jij, де і - номер моніторингового включення ланцюжка; j=(1-3, 2-4, 3-5, 4-6 ...) - позначення відстаней С-Ф і Ф-С в ланцюжках. Очевидно, що сума jij з урахуванням знаків буде дорівнювати зміні довжини ланцюжка SLij-SLoj=Sjij, а сума jij двох суміжних ділянок С-Ф і Ф-С буде дорівнювати зміні відстані між найближчими джерелами світла С (тобто блоками, їх утримуючими). Описана технологія в подвійному фотоелектричному ланцюжку дозволяє обчислити і контролювати положення по осі всіх блоків ланцюжка (непарних у верхньому, парних - у нижньому ланцюжку), спираючись на реперні блоки 1,2 і m-1,m. Таким чином, запропонований спосіб забезпечує моніторинг стану геометричних характеристик інженерного спорудження при його експлуатації в автоматичному режимі з необхідною точністю. Література: 1. Г.П. Левчук, B.E. Новак, В.Г. Конусов. Прикладная геодезия. Основные методы и принципы инженерно-геодезических работ. М.Недра, 1981. 2. Я.А. Сундаков. Геодезические работы при возведении крупных промышленных и высотных зданий. М. Недра, 1980. 3. Α.Η. Лобанов. Фотограмметрия. М. Недра, 1984. 4. Климов О.Д., Калугин В.В., Писаренко В.К. Практикум по прикладной геодезии. Изыскания, проектирование и возведение инженерных сооружений. -М.: Недра, 1991. 5. Рішення о видачі деклараційного патенту „Пристрій для контролю стабільності положення елементів споруди” на корисну модель № 11023/1 від 11.08.2005р. 80875 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for monitoring the position of building elements
Автори англійськоюBoiko Ihor Petrovych, Borovyi Valentyn Oleksandrovych, Burachek Vsevolod Hermanovych, Krysenko Maksym Viktorovych, Shults Roman Volodymyrovych
Назва патенту російськоюСпособ контроля положения элементов сооружения
Автори російськоюБойко Игорь Петрович, Боровый Валентин Александрович, Бурачек Вселовод Германович, Крысенко Максим Викторович, Шульц Роман Владимирович
МПК / Мітки
МПК: G01C 5/00
Мітки: положення, точності, спосіб, елементів, споруди, контролю
Код посилання
<a href="https://ua.patents.su/4-80875-sposib-kontrolyu-tochnosti-polozhennya-elementiv-sporudi.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю точності положення елементів споруди</a>
Пристрій контролю точності положення елементів споруди
Номер патенту: 16631
Опубліковано: 15.08.2006
Автори: Рябчій Владислав Валерійович, Боровий Валентин Олександрович, Крисенко Максим Вікторович, Бурачек Всеволод Германович, Шульц Роман Володимирович
МПК: G02B 13/08
Мітки: контролю, споруди, точності, елементів, пристрій, положення
Формула / Реферат:
Пристрій для контролю точності положення елементів інженерної споруди, що містить ланцюг взаємопов'язаних фотоелектричних каналів, який відрізняється тим, що він містить щонайменше два паралельні ланцюжки фотоелектричних каналів, елементи яких (джерела світла, лінзи-об'єктиви і фотоприймачі) встановлені попарно в блоках, які жорстко закріплені на конструкціях споруд, при цьому однотипні елементи двох різних фотоелектричних ланцюжків мають...
Пристрій контролю точності положення елементів інженерної споруди
Номер патенту: 16630
Опубліковано: 15.08.2006
Автори: Бурачек Всеволод Германович, Шульц Роман Володимирович, Рябчій Владислав Валерійович, Крисенко Максим Вікторович, Боровий Валентин Олександрович
МПК: G02B 13/08
Мітки: пристрій, інженерної, точності, контролю, елементів, споруди, положення
Формула / Реферат:
Пристрій для контролю точності положення елементів інженерної споруди, який містить фотоелектричні канали з елементами: джерела світла, об'єктиви, багатоелементні фотоприймачі, що створюють подвійний фотоелектричний ланцюжок, а також захисні світлопроводи з діафрагмами, який відрізняється тим, що всі елементи змонтовані і жорстко встановлені в блоках, кожний з яких містить здвоєний багатоелементний фотоприймач і два об'єктиви, які утворюють...
Спосіб контролю точності положення елементів спорудження
Номер патенту: 14992
Опубліковано: 15.06.2006
Автори: Бойко Ігор Петрович, Бурачек Всеволод Германович, Шульц Роман Володимирович, Боровий Валентин Олександрович, Крисенко Максим Вікторович
МПК: G02B 13/08
Мітки: спорудження, елементів, положення, точності, контролю, спосіб
Формула / Реферат:
Спосіб контролю точності положення елементів спорудження, що заснований на фотоелектричному вимірюванні відхилень елементів спорудження в режимі фотоелектричного ланцюжка з вимірюваних елементів (джерело світла, лінза-об’єктив, фотоприймач, лінза-об’єктив, джерело світла і т.д.), який відрізняється тим, що вимірювання величин відхилень елементів спорудження виконують одночасно не менше ніж у двох аналогічних фотоелектричних ланцюжках, при...
Спосіб контролю стабільності положення елементів споруди
Номер патенту: 79458
Опубліковано: 25.06.2007
Автори: Шульц Роман Володимирович, Бурачек Всеволод Германович, Боровий Валентин Олександрович
МПК: G01C 5/00
Мітки: елементів, споруди, контролю, положення, спосіб, стабільності
Формула / Реферат:
Спосіб контролю стабільності положення елементів протяжної (лінійної) споруди, оснований на фотоелектричному вимірі величини зсуву елемента споруди, який відрізняється тим, що в ньому фотоелектрично вимірюють зміну ситуації в n вимірювальних каналах, пов'язаних між собою послідовно із чергуванням напрямку світлового потоку на 180°, і визначають номер нестабільного елемента в кожному каналі за сукупністю результатів в даному каналі і двох...
Пристрій для контролю стабільності положення елементів споруди
Номер патенту: 10399
Опубліковано: 15.11.2005
Автори: Бойко Ігор Петрович, Шульц Роман Володимирович, Бурачек Всеволод Германович, Крисенко Максим Вікторович, Боровий Валентин Олександрович
МПК: G02B 13/08
Мітки: елементів, контролю, положення, споруди, пристрій, стабільності
Формула / Реферат:
Пристрій для контролю елементів споруди, що містить блоки світлових випромінювачів (БСВ), блоки лінз (БЛ), блоки фотоприймачів (БФ), який відрізняється тим, що всі блоки встановлені і жорстко закріплені на елементах споруди в точках, які знаходяться на контрольних осях споруди, при цьому БСВ та БФ виконані подвійними з орієнтуванням напрямків світлового випромінювання в парі випромінювачів на 180° і відповідно з орієнтуванням напрямків...
Попередній патент: Сполуки фосфонової кислоти як інгібітори серинпротеаз
Наступний патент: Пристрій для аналізу біомолекулярних середовищ
Випадковий патент: Горілка з наночастинками мікроелементів і дорогоцінних металів