Спосіб побудови орбітального угрупування космічних апаратів спостереження землі
Номер патенту: 47608
Опубліковано: 10.02.2010
Автори: Загорулько Олександр Миколайович, Богом'я Володимир Іванович, Костенко Борис Олександрович

Формула / Реферат
Спосіб побудови орбітального угрупування космічних апаратів (КА) спостереження Землі, який полягає в тому, що КА, що входять в угрупування, виводять на орбіту кластерним запуском однією ракетою-носієм, який відрізняється тим, що необхідну періодичність спостереження заданих об'єктів космічною системою забезпечують шляхом точного вибору номінальної висоти виведення КА на орбіту.
Текст
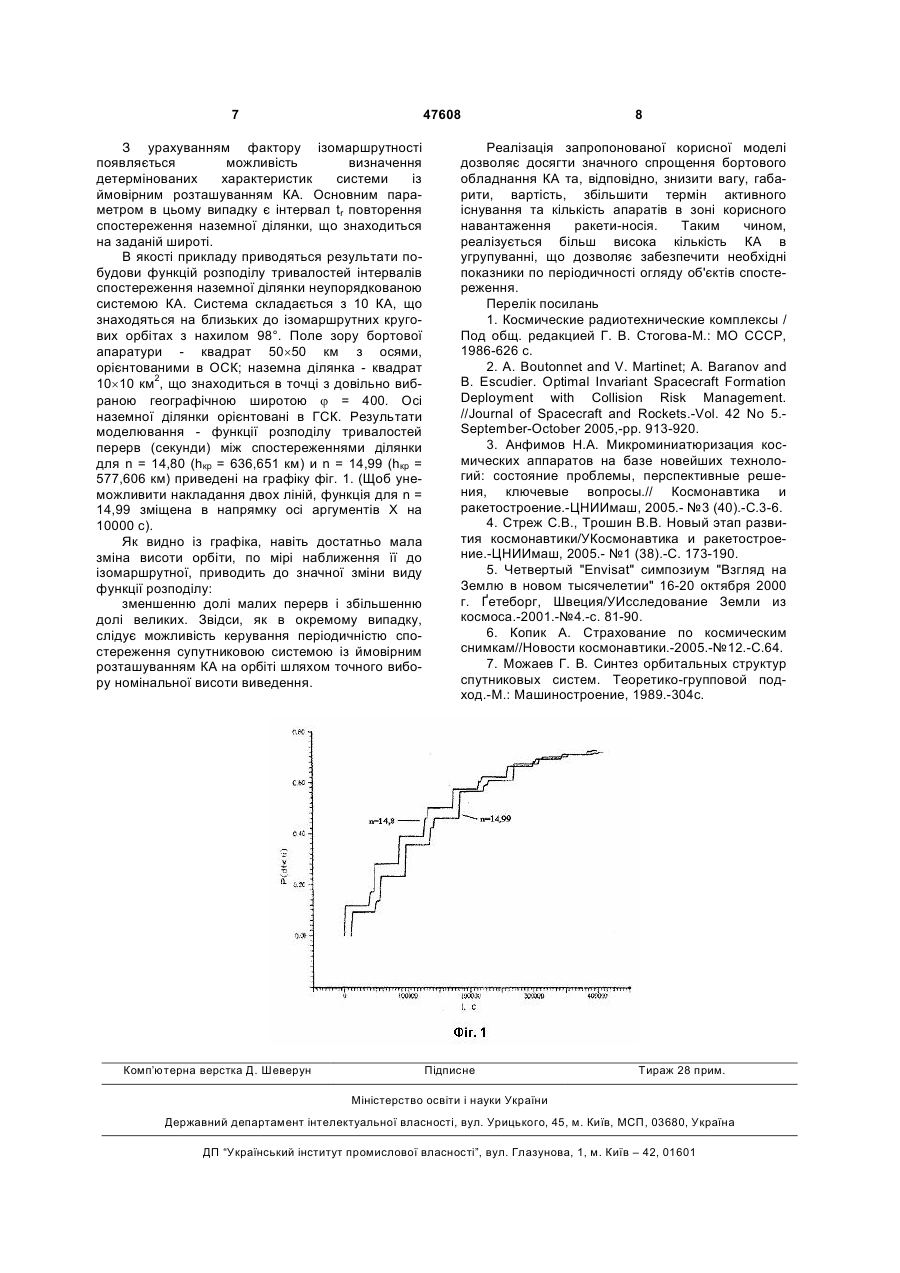
Спосіб побудови орбітального угрупування космічних апаратів (КА) спостереження Землі, який полягає в тому, що КА, що входять в угрупування, виводять на орбіту кластерним запуском однією ракетою-носієм, який відрізняється тим, що необхідну періодичність спостереження заданих об'єктів космічною системою забезпечують шляхом точного вибору номінальної висоти виведення КА на орбіту. (19) (21) u200909790 (22) 25.09.2009 (24) 10.02.2010 (46) 10.02.2010, Бюл.№ 3, 2010 р. (72) ЗАГОРУЛЬКО ОЛЕКСАНДР МИКОЛАЙОВИЧ, КОСТЕНКО БОРИС ОЛЕКСАНДРОВИЧ, БОГОМЬЯ ВОЛОДИМИР ІВАНОВИЧ (73) ЗАГОРУЛЬКО ОЛЕКСАНДР МИКОЛАЙОВИЧ 3 47608 ня КА. Це потребує оснащення КА двигунами, що ускладнює та збільшує вагу конструкції а, також, обмежує термін активного існування в зв'язку з використанням витратних матеріалів (пального). В системах без корекції взаємне положення КА є випадковим, що викликає деякий зсув періодичності спостереження. Зате вага такого КА значно менша, що дозволяє збільшити загальну кількість КА в системі. Для деяких місій може бути прийнятним довільне взаємне розміщення КА. Так, при рівномірному розподілі забезпечується однакова періодичність, при зближенні кількох КА можливе підвищення якості отримуваної інформації ( застосування методів сумісної обробки декількох зображень для отримання стереозображень, підвищення роздільної здатності і т.п.) [6]. Одним з показників систем без корекції положення КА в площині орбіти е функція розподілу випадкових термінів спостереження [71. В описі використані наступні ортогональні системи координат (СК); абсолютна АСК ( друга екваторіальна), Грінвічська ГСК, яка відрізняється від АСК тим, що пов'язана з добовим обертом Землі, орбітальна ОСК з початком в центрі мас КА та пов'язана ПСК, осі якої при номінальній орієнтації співпадають з осями ОСК. До параметрів космічної системи належать: - координати об'єкта спостереження; - елементи орбіти; - поле огляду бортової апаратури; - кути орієнтації. Координати об'єкта спостереження: сферичний прямокутник, центр якого заданий геоцентричною широтою jс та географічною довготою lg, лінійні розміри відрізків осей, які проходять через центр - l по довготі та ¦ no широті; вважається, що одна із осей прямокутника розміщена в площині місцевого меридіану. Розглядається система N супутників на круговій або близькій до кругової еліптичній орбіті. Кругова орбіта визначається вектором елементів Q = {a, i, tву, lву}m - величиною великої напівосі а, нахилом i (ці елементи одинакові для всіх КА системи), часом проходження висхідного вузла tву та довготою висхідного вузла по Гринвічу lву0 на цей момент часу; символ "т" означає транспонування. Для еліптичних орбіт в вектор Q додатково введені значення ексцентриситету е та аргументу широти перигею wp. Поле зору бортової апаратури (БА) кожного КА являє собою розміщений в надирі сферичний прямокутник, обмежений заданими програмними поворотами вектору візування БА на величину ±n /2 в напрямі польоту, ±h /2 - перпендикулярно напряму польоту (тут n и h - лінійні розміри на поверхні Землі). Для величини відхилення х = {n /2 чи h /2} обраховується геоцентричний кут g = x/R похи [ ] 1/ 2 2 ла відстань r = r 2 + RЗ - 2 × a × cos( g ) та кут V, відхилення вектору візування від напряму в надир V = arcsin[R3 × sin(g)/r]. Таким чином визначаються границі поля огляду БА a1, a2 та b 1, b 2 в двох взаємно перпендикулярних напрямках. Якщо задані кутові відхилення ПСК від ОСК матрицею Асо, то 4 положення та розміри поля зору коригуються в відповідності з просторовими похибками. Кутова точка наземного об'єкту відхиляється від точки центру з умовно прийнятими координатами (0, 0) в сферичній системі координат на кут a в напрямі прямого сходження і на кут d - нахилення, які визначаються, як: tg( a ) = 1 /[cos( Dj) × tg( Dj); f ; Dj = 2Rз tg( d) = 1 /[cos( Dl ) × tg( Dj); f , Dl = 2R з де Rз радіус Землі (сферичної). Вектори чотирьох кутових точок наземної ділянки V0i, i = 1…4 визначаються комбінуванням значень ±a і ±d. Для заданих координат центра ділянки (jс, lg) вектори Vi, I = 1…4 кутових точок в ГСК визначаються як Vi = m2×m1×V0i, де cos(l g ) sin(l g ) 0 m2 = sin(l g ) cos(l g ) 0 ; 0 m1 = 0 1 cos(jc ) 0 - sin(jc ) 0 1 0 . sin(jc ) 0 cos(jc ) Вектор Vc направляючих косинусів центра ділянки визначається як cos(jc ) × cos( l g ) Vc = cos(jc ) × sin(l g ) . sin(jc ) В процесі перебору кожного з N КА, що входять в систему, для заданого інтервалу часу t1…t2 будується таблиця часової послідовності спостереження. Для даного j-го KA (j = 1…N) задається сукупність елементів орбіти Q, і далі визначаються проміжки часу в межах наземної ділянки в полі зору БА. Це проводиться в циклі по числу витків на інтервалі t1…t2. На одному витку з початковим часом ta і періодом обертання T можливо не більше одного сеансу видимості наземної ділянки з борту KA (що справедливо для орбіт з періодом обертання менше доби). При номінальній орієнтації (ССК співпадає з ОСК) точка видимості відповідає мінімальному куту між радіус-вектором KA VKA і вектором середини проміжку Vc. Якщо ССК не співпадає з ОСК, замість вектору VKA береться вектор візирування Vniz, що визначається як третій рядок матриці Aсо×Aog. Визначення положення точки видимості (або найближчої до неї) проходить шляхом перебору декількох (k1) точок по витку та вибору точки з мінімальним значенням кута, з наступним уточненням положення мінімуму в ітераційному циклі. Для tiÎ(ta,ta + T), i = 1…k1 обчислюються аргумент широти KA u за формулами кругового або еліптичного руху, та Грінвічська довгота висхідного вузла lвyi 5 ui = wo × ( t i - t a ); l вуі = lву 0 + wз × ( ti - ta ), а за ними - матриця Aog переходу ГСК-ОСК. Числове значення вектору VKA задається як третій рядок матриці Aog. Для сукупності значень часу ti, i = 1…k1 визначається час tk, для якого кут ∟VKA,Vc (або ∟Vniz,Vc) мінімальний, тобто c = (VKA,Vc)®max. Для більш точного визначення часу проводиться апроксимація параболою, що обраховується на ділянці (tk-1, tk+1) трьох послідовних значень ck-1(tk-1), ck(tk), ck+1(tk+1); уточнене значення часу topt визначається по формулі: t opt = t k -1 + (ck - ck -1) × (tk +1 - tk -1)2 - (ck +1 - ck -1) × (tk - tk -1)2 . 2 × [(c k - c k -1) × (t k +1 - t k -1 ) - (c k +1 - c k -1) × (t k - t k -1 )] Обчислюється відповідне йому copt(topt) і описана процедура повторюється з підстановкою замість tk і ck(tk)topt i copt(topt) відповідно до тих пір, поки не буде виконана умова t opt - tk +1 £ e , де e задана мала константа. Для оцінки видимості наземної ділянки в циклі проводиться перевірка умов попадання кутів ділянки в поле зору БА. Визначається положення в ОСК заданого в ГСК вектора кута Vi, i = 1…4 як Voi =: Аоg×Vi, Вектор roKA положення KA в ОСК має вигляд 47608 6 виходу із поля зору останнього супутника. Після виконання обчислень по nn витків кожного із N супутників складається таблиця значень тривалості перерв між сусідніми сеансами, записаними в каталог. Дані цієї таблиці є функцією елементів орбіт КА, що входять в систему. У системи, що коригується (упорядковується) відносне фазове розташування КА визначається заданими значеннями часу tвуі, j = 1…N проходження висхідних вузлів орбіт. Обчислена на їх основі таблиця дозволяє провести аналіз часової програми роботи системи з детермінованими елементами орбіти. У некоригованій системі значення часу tвуі, j = 1…N є випадковими величинами. Для отримання статистично стійкого результату проводиться серія із Nвх описаних дослідів, в кожному із яких значення часу проходження висхідного вузла окремими супутниками задаються випадковим чином. Дані з цієї таблиці є основою для розрахунку функції розподілу P(Dt < Dtзадач) - графіка ймовірності того, що тривалість перерви Dt не перевищує заданого значення Dtзада. Ймовірність Р обрвховується як відношення P = n(Dt < Dtзадач)/nпол., де n i nпол означають відповідно число перерв, що задовольняють приведеній умові, та повну кількість перерв. Функція, яку необхідно знайти Р будується як результат усереднення окремих рішень. При проведенні серії рішень для різних вихідних даних необхідно виділити вплив фактора ізомаршрутності орбіти, тобто можливості проходження траси супутника через декілька діб по одному і тому ж сліду. Якщо орбіта КА близька до ізомаршрутної, графік значень часу перерв втрачає ймовірний характер і в значній степені набирає детерміновані властивості. Розподіл тривалостей перерв змінюється за рахунок збільшення числа малих та великих перерв, при одночасному знижені кількості перерв середньої тривалості. Умовою ізомаршрутності є n×T×wотн = 2p; де n - число цілих витків КА, по закінченні яких повторюється проходження траси по одному сліду, & wоmn = wз - Wву де w3 2p / 86164 _ = кутова roKA = {0 0 a / Rз }T , де а - велика напіввісь кругової орбіти; якщо розглядається орбіта не кругова, замість а підставляється відповідне значення величини радіусу орбіти. Вектор візирування кутової точки з КА в ОСК; r = Voi - roKA; в ССК ri = Aco×roi/|roi| в результаті нормування отримуємо вектор направляючих косинусів. Визначаються кути a, b відхилення вектору rі від осі - z ССК в проекціях на площині xz и yz: tg(a)=-rx/rz; tg(b) = -ry/rz Умова попадання вектора напрямку на i-й (і = 1…4) кут в полі зору БА; a1£a£a2; b1£b£b2; Вважається, що виконання цієї умови для чошвидкість обертання Землі, тирьох кутових точок підтверджує знаходження 7/2 & всієї наземної ділянки в полі зору БА в момент = -10 × æ R з ö × cos(i) Wву [градусів/доба] ç ÷ часу t. è a ø Далі в ітераційних процедурах, методом швидкість еволюції висхідного вузла орбіти. ділення відрізку навпіл визначаються проміжки Підставляючи формулу для періоду оберту Т, часу входу ділянки в поле зору та виходу із нього. можна отримати вираз для пошуку параметрів Отримані значення часу входу tin і виходу tout заноізомаршрутних орбіт сяться в каталог (таблицю значень часу). 7/2 m 1 æR ö Каталог заповнюється в процесі перебору всіх × cos(i) / 57,3 = × w3 + 10 × ç з ÷ a3 n N КА. Занесення даних в каталог відбувається в è a ø порядку слідування значень часу - більш пізні споДля кругових орбіт з нахиленням t = 98° і висостереження знаходяться далі від початку, ніж тою орбіти hкp це рівняння має наступні рішення: більш ранні. При заповненні каталогу враховуються можливі перекривання сеансів спостереження n = 16; a = 6655,175 км; hкр = 284,2 км; (від різних супутників), часткові або повні. В цьому n = 15; a = 6945,627 км; hкр = 574,6 км; випадку початок сеансу обчислюється як момент n = 14; a = 7270,500 км; hкр = 899,5 км; попадання наземної ділянки в полі зору першого n = 13; a = 7636,759 км; hкр = 1265,8 км, и супутника, що спостерігається, і кінець - як момент т.д. 7 47608 З урахуванням фактору ізомаршрутності появляється можливість визначення детермінованих характеристик системи із ймовірним розташуванням КА. Основним параметром в цьому випадку є інтервал tr повторення спостереження наземної ділянки, що знаходиться на заданій широті. В якості прикладу приводяться результати побудови функцій розподілу тривалостей інтервалів спостереження наземної ділянки неупорядкованою системою КА. Система складається з 10 КА, що знаходяться на близьких до ізомаршрутних кругових орбітах з нахилом 98°. Поле зору бортової апаратури - квадрат 50´50 км з осями, орієнтованими в ОСК; наземна ділянка - квадрат 10´10 км2, що знаходиться в точці з довільно вибраною географічною широтою j = 400. Осі наземної ділянки орієнтовані в ГСК. Результати моделювання - функції розподілу тривалостей перерв (секунди) між спостереженнями ділянки для n = 14,80 (hкр = 636,651 км) и n = 14,99 (hкр = 577,606 км) приведені на графіку фіг. 1. (Щоб унеможливити накладання двох ліній, функція для n = 14,99 зміщена в напрямку осі аргументів X на 10000 с). Як видно із графіка, навіть достатньо мала зміна висоти орбіти, по мірі наближення її до ізомаршрутної, приводить до значної зміни виду функції розподілу: зменшенню долі малих перерв і збільшенню долі великих. Звідси, як в окремому випадку, слідує можливість керування періодичністю спостереження супутниковою системою із ймовірним розташуванням КА на орбіті шляхом точного вибору номінальної висоти виведення. Комп’ютерна верстка Д. Шеверун 8 Реалізація запропонованої корисної моделі дозволяє досягти значного спрощення бортового обладнання КА та, відповідно, знизити вагу, габарити, вартість, збільшити термін активного існування та кількість апаратів в зоні корисного навантаження ракети-носія. Таким чином, реалізується більш висока кількість КА в угрупуванні, що дозволяє забезпечити необхідні показники по періодичності огляду об'єктів спостереження. Перелік посилань 1. Космические радиотехнические комплексы / Под общ. редакцией Г. В. Стогова-М.: МО СССР, 1986-626 с. 2. A. Boutonnet and V. Martinet; A. Baranov and B. Escudier. Optimal Invariant Spacecraft Formation Deployment with Collision Risk Management. //Journal of Spacecraft and Rockets.-Vol. 42 No 5.September-October 2005,-pp. 913-920. 3. Анфимов Н.А. Микроминиатюризация космических аппаратов на базе новейших технологий: состояние проблемы, перспективные решения, ключевые вопросы.// Космонавтика и ракетостроение.-ЦНИИмаш, 2005.- №3 (40).-С.3-6. 4. Стреж С.В., Трошин В.В. Новый этап развития космонавтики/УКосмонавтика и ракетостроение.-ЦНИИмаш, 2005.- №1 (38).-С. 173-190. 5. Четвертый "Envisat" симпозиум "Взгляд на Землю в новом тысячелетии" 16-20 октября 2000 г. Ґетеборг, Швеция/УИсследование Земли из космоса.-2001.-№4.-с. 81-90. 6. Копик А. Страхование по космическим снимкам//Новости космонавтики.-2005.-№12.-С.64. 7. Можаев Г. В. Синтез орбитальных структур спутниковых систем. Теоретико-групповой подход.-М.: Машиностроение, 1989.-304с. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of building orbital group of spaceships for observation of earth
Автори англійськоюZahorulko Oleksandr Mykolaiovych, Kostenko Borys Oleksandrovych, Bohomia Volodymyr Ivanovych
Назва патенту російськоюСпособ построения орбитальной группировки космических аппаратов наблюдения земли
Автори російськоюЗагорулько Александр Николаевич, Костенко Борис Александрович, Богомья Владимир Иванович
МПК / Мітки
МПК: B64G 1/24
Мітки: космічних, побудови, спосіб, угрупування, землі, орбітального, спостереження, апаратів
Код посилання
<a href="https://ua.patents.su/4-47608-sposib-pobudovi-orbitalnogo-ugrupuvannya-kosmichnikh-aparativ-sposterezhennya-zemli.html" target="_blank" rel="follow" title="База патентів України">Спосіб побудови орбітального угрупування космічних апаратів спостереження землі</a>
Спосіб планування спостереження космічних об`єктів оптико-електронними засобами контролю космічного простору
Номер патенту: 38358
Опубліковано: 12.01.2009
Автори: Ломоносов Сергій Євгенійович, Богдановський Олексій Миколайович, Пашков Дмитро Павлович, Рачинський Олександр Петрович
МПК: B64G 3/00
Мітки: контролю, засобами, простору, планування, спосіб, космічного, спостереження, космічних, оптико-електронними, об'єктів
Формула / Реферат:
Спосіб планування спостереження космічних об'єктів (КО) оптико-електронними засобами (ОЕЗ) контролю космічного простору (ККП), який полягає в визначенні черговості спостережень для КО, що одночасно перебувають в зоні дії засобу ККП в відповідності з розрахованими співвідношеннями помилок та часу визначення початкових умов шляхом прогнозування значень останніх на момент входу в зону дії ОЕЗ та технічних параметрів телескопа, який відрізняється...
Спосіб захисту командних радіоліній космічних апаратів
Номер патенту: 38812
Опубліковано: 26.01.2009
Автори: Богом'я Володимир Іванович, Загорулько Олександр Миколайович, Ожінський Віктор Васильович
МПК: G05B 17/00
Мітки: апаратів, захисту, командних, спосіб, радіоліній, космічних
Формула / Реферат:
Спосіб захисту командних радіоліній космічних апаратів, який полягає в тому, що в сеансі зв'язку космічний апарат (КА) проводить авторизацію наземного пункту керування за підписом, цифровим ключем та додатково з використанням навігаційного приймача визначаються координати наземного передавача і порівнюються із записаними до постійного запам'ятовуючого пристрою на борту КА відповідно номеру та приймається рішення про обробку повідомлень від...
Спосіб визначення орбіт навігаційних космічних апаратів
Номер патенту: 36808
Опубліковано: 16.04.2001
Автори: Голкіна Валентина Василівна, Бутенко Ольга Станіславівна, Голкін Дмитро Васильович, Деденок Віктор Петрович
МПК: G01S 5/00
Мітки: апаратів, орбіт, спосіб, навігаційних, космічних, визначення
Текст:
...Врахуємо тепер, що у випадку незалежних і рівноточних вимірів (4) Kr=sr2×І де І - одинична матриця (МхМ); sr2 - дисперсія помилок одиничних вимірів різності дальностей в однобазовому вимірювальному комплексі. З ура хуванням (4) рівняння (3) перетворюють до вигляду (5) sr2(AT×А)= (AT×А)×Кр×(AT×А) Домножують ліву і праву частини рівняння (5) зліва і справа на матрицю (AT×А)-1, обернену матриці (AT×А). Остаточно отримують (6) Кр=sr2×(AT×А)-1...
Спосіб переорієнтації космічних апаратів
Номер патенту: 29637
Опубліковано: 25.01.2008
Автори: Кошовий Олег Віталійович, Загорулько Олександр Миколайович, Ожінський Віктор Васильович, Жила Олексій Володимирович
МПК: G05B 17/00
Мітки: спосіб, переорієнтації, апаратів, космічних
Формула / Реферат:
Спосіб переорієнтації космічних апаратів, який полягає в тому, що в сеансі зв’язку процесор приймає щосекундно дані про параметри руху космічних апаратів (X, Y, Z, Vx, Vy, Vz, T) у Гринвіцькій системі координат з навігаційного приймача (GPS, "Глобалстар"), обробляє їх, обраховує кути між надиром та напрямком на ППІ та видає їх значення до підсистеми орієнтації та стабілізації для виконання відворотів, який відрізняється тим, що...
Спосіб спостереження землі з космосу
Номер патенту: 17366
Опубліковано: 15.04.1997
Автори: Уруський Олег Семенович, Бушуев Евген Іванович, Драновський Володимир Йосипович, Салтиков Юрій Дмитрович, Зубко Віктор Петрович
МПК: H04N 7/00
Мітки: землі, спостереження, космосу, спосіб
Формула / Реферат:
1. Способ наблюдения Земли из космоса, включающий прогнозирование движения спутника, формирование программы съемки и передачу ее в Центр управления полетом, формирование и закладку на борт временной программы работы спутника, передачу целеуказаний приемным земным станциям, наведение съемочной аппаратуры и бортовых передающих антенн, съемку и передачу информации на приемные земные станции, прием полученной со спутника информации, ее обработку...
Попередній патент: Нейронний годинник
Наступний патент: Реанімаційна рентгенопрозора каталка
Випадковий патент: Спосіб лікування інфаркту міокарда у хворих на залізодефіцитну анемію