Адаптивний фільтр оцінки параметрів траєкторії цілі
Номер патенту: 48843
Опубліковано: 15.08.2002
Автори: Савченко Микола Павлович, Фик Олександр Ілліч, Челпанов Артем Володимирович, Карлов Володимир Дмитрович
Формула / Реферат
Адаптивний фільтр оцінки параметрів траєкторії цілі, що містить блок обчислення кореляційної матриці помилок, послідовно з'єднані блок обчислення оцінок параметрів, пристрій що запам'ятовує та блок екстраполяції параметрів, який відрізняється тим, що додатково введено блок фазометра і вузол оцінки швидкості та прискорення у складі послідовно з'єднаних блоків генератора опорних функцій, блоку вирахування, корелятора і блоку формування оцінок, причому вихід блоку екстраполяції параметрів з'єднаний із другим входом блоку оцінки параметрів, вихід блоку фазометра з'єднаний із другим входом блоку вирахування, а вихід блоку формування оцінок із другим входом блоку екстраполяції параметрів, входами пристрою є входи блоків оцінки кореляційної матриці помилок і перший вхід блоку оцінки параметрів, а також вхід блоку фазометра, виходами пристрою є виходи блоків оцінки кореляційної матриці помилок і оцінки параметрів.
Текст
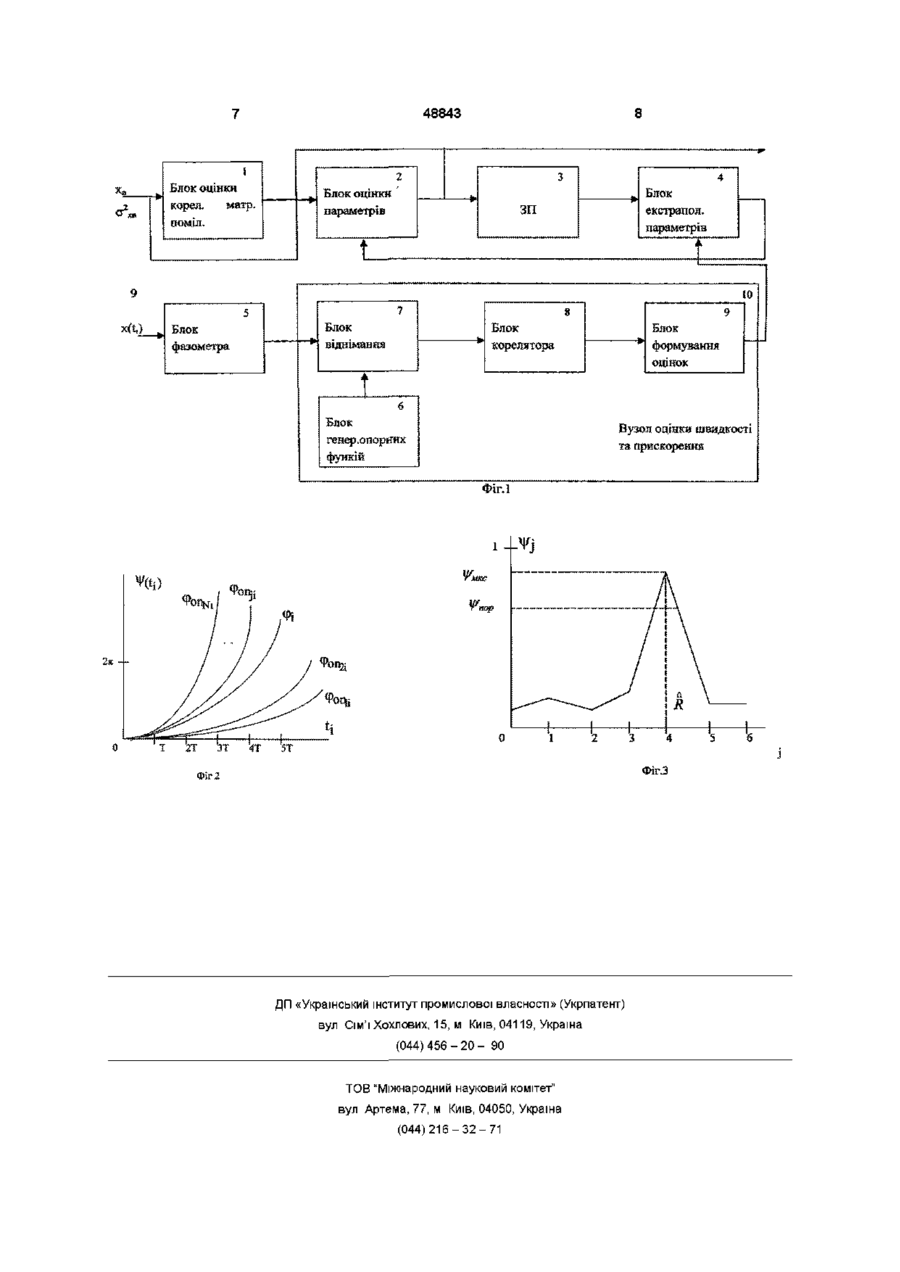
Адаптивний фільтр оцінки параметрів траєкторії ЦІЛІ, що містить блок обчислення кореляційної матриці помилок, послідовно з'єднані блок обчислення оцінок параметрів, пристрій, що запам'ятовує, та блок екстраполяції параметрів, який відрізняється тим, що додатково введено Запропонований винахід відноситься до області радіолокації і може бути використаний для оцінки параметрів траєкторії ЦІЛІ, ЩО маневрує Відомий адаптивний фільтр - пристрій квазиоптимального вимірювача параметрів [1], що відстежує рух маневруючої ЦІЛІ, ЯКИЙ МІСТИТЬ два ка нала (фільтра) оцінки параметрів руху ЦІЛІ ВІДПОВІДНО при відсутності і наявності маневру ЦІЛІ, а також канал виявлення й оцінки маневру Результуючі оцінки параметрів траєкторії знаходяться як середньозважені значення оцінок з урахуванням імовірності маневру Недоліком цього пристрою є те, що оцінки параметрів траєкторії формуються на основі апостеріорних помилок фільтрації, після декількох оглядів РЛС, що приводить до значного запізнювання часу визначення початку й інтенсивності маневру, і, ВІДПОВІДНО, до значних динамічних помилок фільтрації Найбільш близьким до запропонованого технічним рішенням, є обраний як прототип, адаптивний фільтр оцінки параметрів траєкторії ЦІЛІ, ЩО маневрує, [2], який містить у свому складі блок оцінки кореляційної матриці помилок, блок оцінки параметрів траєкторії, пристрій, що запам'ятовує та блок екстраполяції параметрів траєкторії У цьому пристрої супровід і оцінка параметрів траєкторії ЦІЛІ здійснюється по рекурентній схемі блок фазометра і вузол оцінки швидкості та прискорення у складі послідовно з'єднаних блоків генератора опорних функцій, блока віднімання, корелятора і блока формування оцінок, причому вихід блока екстраполяції параметрів з'єднаний із другим входом блока оцінки параметрів, вихід блока фазометра з'єднаний із другим входом блока віднімання, а вихід блока формування оцінок - із другим входом блока екстраполяції параметрів, входами пристрою є входи блоків оцінки кореляційної матриці помилок і перший вхід блока оцінки параметрів, а також вхід блока фазометра, виходами пристрою є виходи блоків оцінки кореляційної матриці помилок і оцінки параметрів ЛІНІЙНОГО фільтра Калмана При цьому розраховуються одночасно кілька екстрапольованих значень параметрів для різних можливих інтенсивностей маневру Недоліком даного пристрою є те, що оцінка наявності й інтенсивності маневру виробляється на підставі порівняння екстрапольованих і обмірюваних значень координат ЦІЛІ При цьому задана точність оцінки параметрів досягається тільки після декількох періодів огляду РЛС, тобто зі значними динамічними помилками фільтрації, що може привести до зриву супроводу Таким чином, у прототипі виявлення маневру та оцінка його інтенсивності здійснюється по апостеріорних помилках фільтрації (по неузгодженості вимірюваного й екстрапольованого значень) При цьому динамічна помилка оцінки дальності може 1 ? досягати величини 5R = — 5 R X ^ = а радіальэ 2 ноі швидкості - до 400м/с [1] В основу винаходу поставлена задача створити такий адаптивний фільтр оцінки параметрів траєкторії ЦІЛІ, у якому введення нових блоків, а саме блоків фазометра і вузла оцінки швидкості і прискорення ЦІЛІ дозволить забезпечити своєчасне виявлення маневру ЦІЛІ Й оцінку його інтенсивності, тим самим підвищити точність виміру параметрів траєкторії ЦІЛІ і СТІЙКІСТЬ її супроводу со ^00 00 48843 Технічний результат, який може бути отриманий при використанні винаходу, полягає в можливості підвищити точність виміру параметрів траєк екстрапольованих значень координат ЦІЛІ ХЭ і 2 (І) торії ЦІЛІ і СТІЙКІСТЬ її супроводу Поставлена задача вирішується за рахунок того, що в пристрій, який що містить блок оцінки кореляційної матриці помилок, а також послідовно з'єднані блок оцінки параметрів, пристрій, що запам'ятовує (ЗП) і блок екстраполяції параметрів додатково введення послідовно з'єднані блок фазометра та вузол оцінки швидкості і прискорення ЦІЛІ у складі послідовно з'єднаних блоку генератора опорних функцій, блоків вирахування, корелятора і формування оцінок, при цьому вихід блоку фазометра з'єднаний із другим входом блоку вирахування, а вихід блоку формування оцінок із другим входом блоку екстраполяції параметрів Уведені блоки дозволяють по ПОСЛІДОВНОСТІ з п луна-сигналів, отриманих у ході одного огляду РЛС вимірити значення функції фази сигналів ер, далі шляхом кореляційної обробки одержати оцінки прискорення, що характеризують наявність і інтенсивність маневру ЦІЛІ І використовувати їх для більш своєчасної та точної оцінки параметрів траєкторії При цьому динамічні помилки фільтрації по дальності і швидкості зменшуються в кілька разів та підвищується СТІЙКІСТЬ супроводу ЦІЛІ, ЩО маневрує На фіг 1 приведена структурна схема запропонованого пристрою На фіг 2 показані типові функції фази луна-сигналів і опорні функції фази На фіг 3 приведені результати кореляційної обробки типової функції фази луна-сигналів Запропонований пристрій (фиг 1) містить блок обчислення кореляційної матриці помилок 1, послідовно з'єднані блок обчислення оцінок параметрів 2, що запам'ятовує пристрій (ЗП) 3, блок екстраполяції параметрів 4, а також блок фазометра 5 і вузол оцінки швидкості та прискорення 10 у складі послідовно з'єднаних блоків генератора опорних функцій (ГОФ) 6, вирахування 7, корелятора 8 і формування оцінок 9, причому вихід блоку екстраполяції параметрів 4 з'єднаний із другим входом блоку оцінки параметрів 2, вихід блоку фазометра 5 з'єднаний із другим входом блоку вирахування 7, а вихід блока формування оцінок 9 з другим входом блоку екстраполяції параметрів 4, входами пристрою є входи блоків оцінки кореляційної матриці помилок 1 і оцінки параметрів 2, а також вхід блоку фазометра 5, виходами пристрою є виходи блоку оцінки кореляційної матриці помилок 1 і блок оцінки параметрів 2 му Робота даного пристрою полягає у наступно У ході чергового (п-го) огляду РЛС на вхід пристрою надходить ПОСЛІДОВНІСТЬ з m луна-сигналів від супроводжуваної ЦІЛІ x(t,), а також обмірювані по цій ПОСЛІДОВНОСТІ значення координат ЦІЛІ ХП І їхніх дисперсій помилок а 2 а П на момент часу t n Супровід і оцінка параметрів траєкторії ЦІЛІ ЗДІЙСНЮЄТЬСЯ по рекуррентным співвідношеннях ЛІНІЙНОГО фільтра Калмана [2] У блоці екстраполяції параметрів 4 на підставі розрахункових оцінок отриманих за час супроводу ЦІЛІ в попередніх (п-1) оглядів РЛС і зберігаються в (ЗП) 3 здійснюється розрахунок ЭИ ~~ І Я—І 1 де х э - час екстраполяції параметрів, х, х,х - ВІДПОВІДНО оцінки значень параметра траєкторії і його похідних Величина прискорення х характеризує наявність і інтенсивність маневру ЦІЛІ Оцінка прискорення виробляється шляхом кореляційної обробки функції фази ПОСЛІДОВНОСТІ З m луна-сигналів Значення функції фази ер,, де і = 1, 2, m визначаються в блоці фазометра 5 шляхом виміру фази луна-сигналів щодо фази зондувального сигналу A (2) L де X - довжина хвилі, t3, - час затримки і-го луни-сигналу, R 0 ,RR - параметри траєкторії ЦІЛІ - дальність, швидкість і прискорення Вид функції фази ПОСЛІДОВНОСТІ луна-сигналів приведений на фіг 2, він залежить від параметрів траєкторії R 0 ,RR Оцінка параметрів швидкості і прискорення виробляється методом порівняння функції фази фі з набором з N опорних (еталонних) функцій фази ф п Порівняння здійснюється шляои хом обчислення N значень кореляційного інтегралу (3) P0,r J=* 2, N (4) Л (5) Т-перюд повторення сигналів, AR, AR - дискретність відліку швидкості та прискорення Значення опорних функцій (фопи формуються в блоці генератора опорних функцій 6, а значення різниці Дфу - у блоці вирахування 7 Обчислення значень кореляційного інтеграла здійснюється в блоці 8 Вид перетину тіла невизначеності, отриманого зі значень щ, приведений на фіг З Як оцінку значень радіальної швидкості і прискорення приймаються параметри R o n і R o n тієї опорної функції, при порівнянні з який отримане максимальне значення кореляційного інтеграла Значення прискорення R характеризує наяв 48843 ність і інтенсивність маневру ЦІЛІ ОЦІНКИ R І R використовуються при розрахунку екстрапольованих значень параметрів траєкторії ЦІЛІ ВІДПОВІДНО До(1) У блоці оцінки кореляційної матриці помилок (КМП) 1 обчислюються значення елементів КМП де Ф п - матриця екстраполяції, \\>п і - кореляційна матриця помилок, отримана на (п-1)-ом кроці У блоці оцінки параметрів 2 на підставі обмірюваних на n-ом кроці значень параметрів хп і отриманих екстрапольованих значень х э п , х э п формуються оцінки параметрів траєкторії показаний) Позитивний ефект, що дає використання запропонованого пристрою, можна оцінити на прикладі типовий оглядової РЛС дециметрового діапазону Для параметрів РЛС із довжиною хвилі X = 0,5м , періоду повторення Т = Юмс, періоду огляду Те = 20з, ширини діаграми спрямованості антени в азимутальній площині Д^обр - 1°час опромінення ЦІЛІ складає величину 560мс При цьому по одній ЦІЛІ може бути отримана когерентна пачка до 50ти луна-сигналів за один огляд Точність виміру ВІДПОВІДНО радіальній швидкості і прискоренняпо когерентній пачці складає [5] 5R = —' NT = 4м/с , При обліку маневру ЦІЛІ З використанням даної інформації динамічна помилка оцінки дальності в запропонованому пристрої де A n B n - коефіцієнти підсилення фільтра, сформовані на основі значень КМП і дисперсій помилок виміру з використанням співвідношень для ЛІНІЙНОГО фільтра Калмана [2] При технічній реалізації пропонованого пристрою можна використовувати наступні типові вузли і блоки радіоелектронної апаратури Блоки оцінки кореляційної матриці помилок 1, оцінки параметрів траєкторії 2, пристрою, що запам'ятовує 3, екстраполяції параметрів 4 можуть бути виконані як у прототипі [2] на основі набору типових мікросхем обчислення арифметичних операцій [3] Блок фазометра 5 виконується у виді стандартного перетворювача «фаза-код» [4] Блоки генератора опорних функцій 6, вирахування 7, корелятора 8 і формування оцінок 9 забезпечують виконання арифметичних і логічних операцій, а також обчислення тригонометричних функцій ВІДПОВІДНО до виражень (3) (6) і можуть бути виконані на основі типових мікросхем [3] чи на базі мікропроцесора ПОСЛІДОВНІСТЬ включення в роботу окремих блоків пристрою і їхній порядок взаємодії на ВІДПОВІДНИХ етапах обробки, а також порядок запису і знімання інформації визначається і забезпечується сіткою керуючих і синхронізуючих імпульсів, «прив'язаних» до сітки синхронізатора РЛС (вузол синхронізації і керування на схемі не 1 7 складає величину 5 R = — 5 Rx^ = 0,8км,, а по радіальній швидкості 5R = 40м/с при інтенсивності маневру ЦІЛІ 5 R = 40M/C У прототипі помилки значно більше, ніж у запропонованому пристрої Крім того, при величині строба супроводу AR = 35R = Зкм відбудеться зрив з супроводу ЦІЛІ, що маневрує Література 1 Тихонов В И , Харпов В Н Статистический анализ и синтез радиотехнических устройств и систем - М Радио и связь, 1991, - 550с 2 Кузьмин С 3 Основы проектирования систем цифровой обработки радиолокационной информации - М Радио и связь, 1986 -182 с 3 Цифровые и аналоговые интегральные микросхемы Справочник Под ред С В Якубовского, - М J Радио и связь, 1990*546 с 4 Гитис Э И Преобразователи информации для ЭЦВМ - М , Энергия, 1975-323 с 5 Обработка сигналов в многоканальных РЛС Под ред А П Лукошкина -М Радио и связь, 1983-197 с 48843 S Блок оцінки корел. матр. поміл. Блок оцінки параметрів Блок ексїрапол. параметрів ЗП 10 Блок Блок віднімання Блок корелятора Блок генер .опорних функій Блок формування оцінок Вузол оцінки швидкості та прискорення Фіг.1 ФІг.3 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive filter for estimating parameters of a target trajectory
Автори англійськоюChelpanov Artem Volodymyrovych, Savchenko Mykola Pavlovych, Karlov Volodymyr Dmytrovych
Назва патенту російськоюАдаптивный фильтр для оценки параметров траектории цели
Автори російськоюЧелпанов Артем Владимирович, Савченко Николай Павлович, Карлов Владимир Дмитриевич
МПК / Мітки
МПК: G01S 13/52, G01S 13/00
Мітки: цілі, параметрів, адаптивний, оцінки, траєкторії, фільтр
Код посилання
<a href="https://ua.patents.su/4-48843-adaptivnijj-filtr-ocinki-parametriv-traehktori-cili.html" target="_blank" rel="follow" title="База патентів України">Адаптивний фільтр оцінки параметрів траєкторії цілі</a>
Адаптивний цифровий фільтр
Номер патенту: 28990
Опубліковано: 16.10.2000
Автори: Іщенко Володимир Іванович, Зімчук Ігор Валерійович
МПК: G05B 17/00
Мітки: цифровий, фільтр, адаптивний
Формула / Реферат:
Адаптивний цифровий фільтр, що містить послідовно з'єднані блок порівняння, перший вхід котрого є входом пристрою, блок корекції, суматор, блок затримки, блок екстраполяції, вихід якого об'єднай з другим входом суматора, крім того уміщуючий блок зворотного зв'язку, підключеного входом до виходу блока екстраполяції, а виходом до другого входу блока порівняння, який відрізняється тим, що в нього введені перше та друге обчислювальні пристрої,...
Адаптивний фільтр
Номер патенту: 11427
Опубліковано: 25.12.1996
Автори: Мамонов Анатолій Васильович, Гусєв Ігор Вікторович, Ситник Борис Тимофійович, Левочко Борис Степанович, Загарій Генадій Іванович, Гусєв Павло Вікторович, Коновалов Валерій Семенович, Пороцкій Віталій Григорович
МПК: G01S 13/66
Мітки: адаптивний, фільтр
Формула / Реферат:
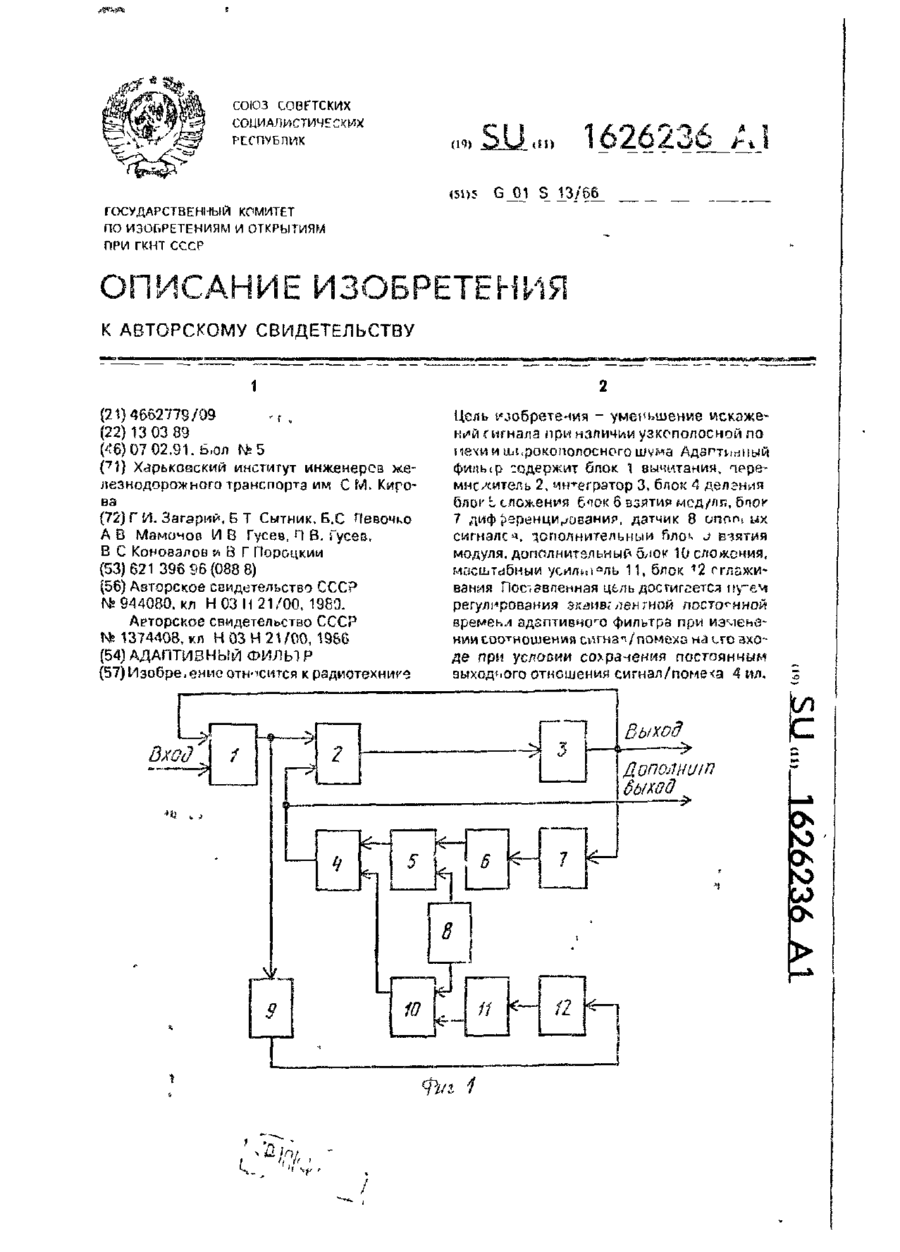
Адаптивный фильтр, содержащий блок вычитания, блок взятия модуля, масштабный усилитель, блок сложения, блок деления и интегратор, выход которого соединен с первым входом блока вычитания и является выходом адаптивного фильтра, входом которого является второй вход блока вычитания, отличающийся тем, что, с целью уменьшения искажений сигнала при наличии узкополосной помехи и широкополосного шума, введены перемножителъ, блок дифференцирования,...
Фазовий виявляч цілі
Номер патенту: 43958
Опубліковано: 15.01.2002
Автори: Коваль Олександр Андрійович, Челпанов Володимир Валентинович, Стахєєв Микола Олександрович, Карлов Володимир Дмитрович
МПК: G01S 13/52
Формула / Реферат:
Фазовий виявляч цілі, що має у своєму складі вузол режекції завад, який відрізняється тим, що до його складу додатково введені послідовно з'єднані когерентний компенсатор і виявляч цілі, при цьому когерентний компенсатор містить два блоки аналізу завад, входи яких підключені відповідно до виходів оперативно-запам'ятовуючих пристроїв вузла режекції завад, два блоки віднімання, перші входи яких з'єднані з виходами відповідних блоків аналізу...
Спосіб виміру кута місця цілі

Номер патенту: 32191
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Бахвалов Валентин Борисович, Кудрик Андрій Миколайович
МПК: G01S 17/00
Мітки: місця, кута, цілі, спосіб, виміру
Текст:
...або шляхом електричного сканування діаграми спрямування антени в робочому кутомісцевому секторі радіолокатора. Спосіб-прототип полягає у виконанні таких операцій: періодичне хитання антени (або діаграми спрямування антени) у вертикальній площині розташування цілі в заданому кутомісцевому секторі; випромшення періодичних зондуючих радіоімпульсів на несучій частоті мікрохвильового діапазону; періодичне переключення антени з передачі...
Прилад керування стрільбою зенітної артилерії
Номер патенту: 10708
Опубліковано: 25.12.1996
Автори: Барінгольц Тетяна Володимирівна, Півняк Сергій Степанович, Кожура Віталій Васильович
МПК: G06F 15/00, F41G 3/08
Мітки: керування, прилад, стрільбою, зенітної, артилерії
Формула / Реферат:
Прилад керування стрільбою зенітної артилерії, який має послідовно з'єднані аналого-цифровий перетворювач поточних координат цілі, диференційно-згладжувальний пристрій, вузол обчислення траєкторії польоту цілі відповідно до обраної гіпотези її руху, вузол ітераційного обчислення, цифро-аналоговий перетворювач і вихідний блок, який відрізняється тим, що до нього введені вузол запам'ятовування значень коефіцієнтів, вузол обчислення...
Попередній патент: Вібраційна машина
Наступний патент: Кореляційно-фазовий вимірювач радіальної швидкості цілі
Випадковий патент: Спосіб оперативного контролю якості опалення міста від централізованих джерел теплопостачання