Прилад керування стрільбою зенітної артилерії
Номер патенту: 10708
Опубліковано: 25.12.1996
Автори: Барінгольц Тетяна Володимирівна, Півняк Сергій Степанович, Кожура Віталій Васильович


Формула / Реферат
Прилад керування стрільбою зенітної артилерії, який має послідовно з'єднані аналого-цифровий перетворювач поточних координат цілі, диференційно-згладжувальний пристрій, вузол обчислення траєкторії польоту цілі відповідно до обраної гіпотези її руху, вузол ітераційного обчислення, цифро-аналоговий перетворювач і вихідний блок, який відрізняється тим, що до нього введені вузол запам'ятовування значень коефіцієнтів, вузол обчислення горизонтальної швидкості, вузол обчислення горизонтального прискорення,суматор горизонтальної координати, вузол обчислення вертикальної швидкості, вузол обчислення вертикального прискорення, суматор вертикальної координати, вузол обчислення поперечної швидкості, вузол обчислення поперечного прискорення, суматор поперечної координати, вузол обчислення швидкості, вузол обчислення кутової швидкості, вузол обчислення інтенсивності маневру, вузол порівняння з пороговими значеннями, вузол обчислення першого коефіцієнту, вузол обчислення другого коефіцієнту, причому четвертий вхід диференційно-згладжувального пристрою з'єднаний з виходом вузла запам'ятовування значень коефіцієнтів, а перший вихід диференційно-згладжувального пристрою з'єднаний із першим входом вузла обчислення горизонтальної швидкості та з першими входами вузла обчислення швидкості та вузла обчислення кутової швидкості, другий вихід диференційно-згладжу вального пристрою з'єднаний з другим входом суматора горизонтальної координати, а третій вихід диференційно-згладжувального пристрою з'єднаний із першим входом вузла обчислення горизонтального прискорення та з третім входом вузла обчислення кутової швидкості, при цьому виходи вузлів обчислення горизонтальної швидкості та обчислення горизонтального прискорення з'єднані з першим та третім входами відповідно суматора горизонтальної координати, вихід якого з'єднаний з першим входом вузла ітераційного обчислення, сьомий вихід диференційно-згладжувального пристрою з'єднаний з першим входом вузла обчислення вертикальної швидкості, а також з другим входом вузла обчислення швидкості та другим входом вузла обчислення кутової швидкості, восьмий вихід диференційно-згладжувального пристрою з'єднаний з другим входом суматора вертикальної координати, а дев'ятий вихід диференційно-згладжувального пристрою з'єднаний з першим входом вузла обчислення вертикального прискорення та з п'ятим входом вузла обчислення кутової швидкості, при цьому виходи вузла обчислення вертикальної швидкості та вузла обчислення вертикального прискорення з'єднані з першим та третім входами відповідно суматора вертикальної координати, вихід якого з'єднаний з третім входом вузла ітераційного обчислення, четвертий вихід диференційно-згладжувального пристрою з'єднаний з першим входом вузла обчислення поперечної швидкості, а також з третім входом вузла обчислення швидкості та з четвертим входом вузла обчислення кутової швидкості, п'ятий вихід диференційно-згладжувального пристрою з'єднаний з другим входом суматора поперечної координати, а шостий вихід диференційно-згладжувального пристрою з'єднаний з першим входом вузла обчислення поперечного прискорення та шостим входом вузла обчислення кутової швидкості, при цьому виходи вузлів обчислення поперечної швидкості та обчислення поперечного прискорення з'єднані з першим та третім входами відповідно суматора поперечної координати, вихід якого з'єднаний з другим входом вузла інтераційного обчислення, вихід вузла обчислення швидкості з'єднаний з другим входом вузла обчислення інтенсивності маневру, перший вхід якого з'єднаний з виходом вузла обчислення кутової швидкості, а вихід вузла обчислення інтенсивності маневру з'єднаний із входом вузла порівняння з пороговнмч значеннями, при цьому перший, другий та третій виходи вузла порівняння з пороговими значеннями з'єднані відповідно з першим, другим та третім входами вузла обчислення першого коефіцієнту, а четвертий, п'ятий та шостий виходи вузла порівняння з пороговими значеннями з'єднані відповідно з першим, другим та третім входами вузла обчислення значення другого коефіцієнту, вихід вузла обчислення першого коефіцієнту з'єднаний з другими входами вузла обчислення горизонтальної швидкості, вузла обчислення вертикальної швидкості та вузла обчислення поперечної швидкості, а вихід вузла обчислення другого коефіцієнту з'єднаний с другими входами вузла обчислення горизонтального прискорення, вузла обчислення вертикального прискорення та вузла обчислення поперечного прискорення.
Текст
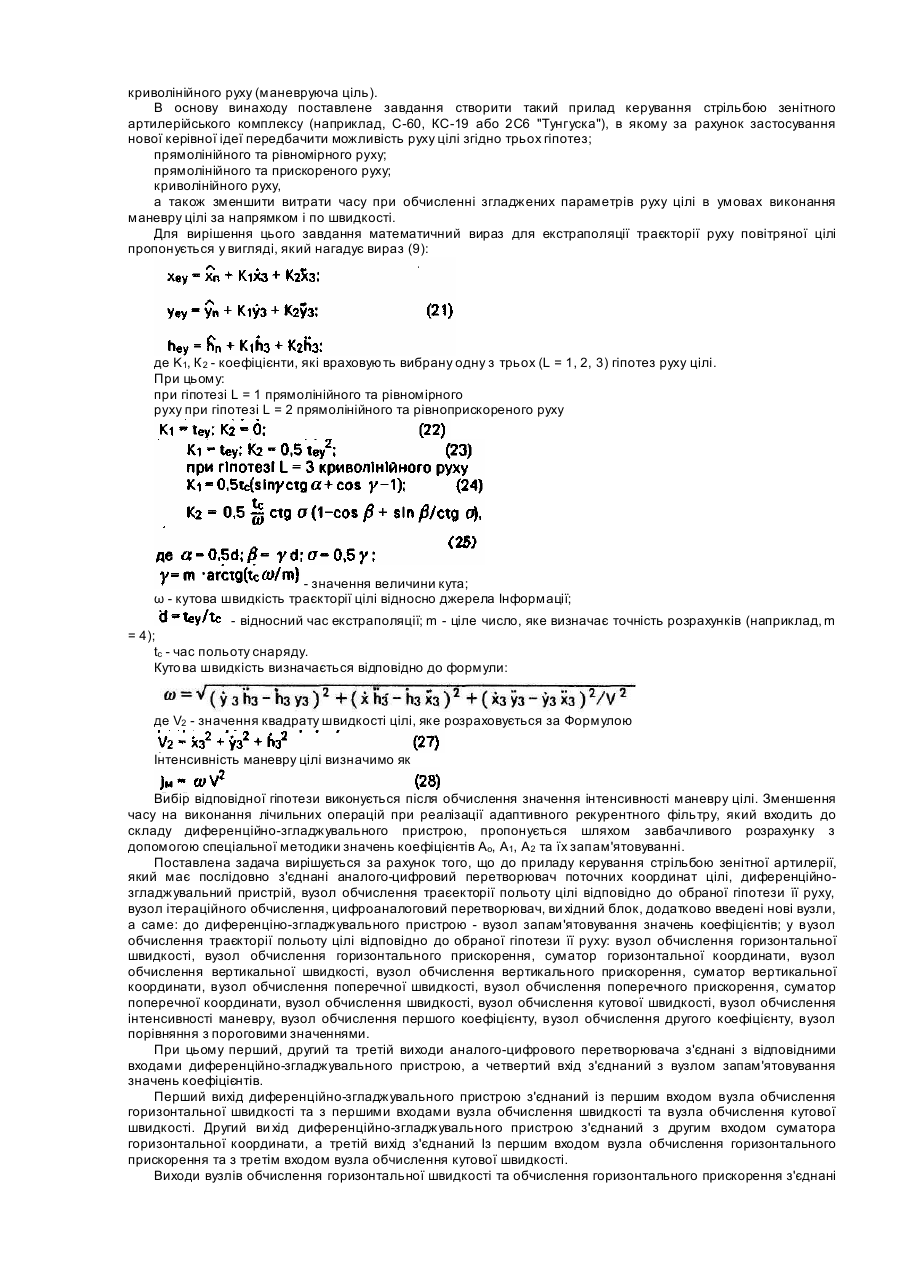
Винахід належить до зенітної артилерії, зокрема, до систем керування стрільбою зенітних артилерійських комплексів С-60 (57-мм автоматична зенітна гармата) і КС-19 (100-мм зенітна гармата). Найбільш близьким по технічній суті і досягнутому результату в обчисленні випереджених координат, положення стволів зенітних гармат є прилад керування стрільбою КВ-70. Прилад у своєму складі має послідовно з'єднані аналого-цифровий перетворювач поточних координат цілі, диференційно-згладжувальний пристрій, вузол обчислення траєкторії польоту цілі відповідно до обраної гіпотези її руху, вузол ітераційного обчислення, цифроаналоговий перетворювач, вихідний блок. Поточні координати цілі у декартовій системі координат у вигляді цифрових кодів надходять до диференційно-згладжувального пристрою, де виконуються операції згладжування поточних координат та їхнє диференціювання. Згладжування поточних координат виконується з допомогою дискретного лінійного фільтра на базі використання фільтра Калмана, наприклад, a, b-фільтра із змінними коефіцієнтами. По кожній з трьох поточних координат х, у, h згладжені координати та швидкості їх зміни на поточному nму кроці згладжування обчислюються згідно з формулами: де екстрапольовані на n-ий крок згладжені оцінки координат; - екстрапольовані на п-ий крок згладжені оцінки швидкості зміни координат; - частота, з якою виконується вимірювання поточних координат, а Т -період повторення; - коефіцієнти підсилення фільтру. Згладжені оцінки координат та швидкості їх зміни обчислюються згідно наступних формул: де - згладжені значення координат цілі на попередньому кроці; - згладженні значення швидкості зміни координат цілі на попередньому кроці. Коефіцієнти підсилення розраховуються згідно формул: Далі по згладжених координатах виконуються стандартні операції обчислення швидкості та прискорення згідно формул: де tc - час спостереження цілі; - поточні згладжені координати цілі, які вимірюються в початкову мить часу спостереження; - поточні згладжені координати цілі, які вимірюються в кінцеву мить часу спостереження; - значення згладжених координат цілі, які вимірюються на середині інтервалу часу спостереження. Далі обчислені координати цілі та швидкості їх зміни подаються до входу вузла обчислення траєкторії польоту цілі відповідно до обраної гіпотези її руху, де виконується обчислення згідно наступних формул: де - екстрапольовані на випереджений час tey значення координат цілі. Згідно наведених формул (1...9) І виконана реалізація диференційно-згладжу-вального пристрою, а також вузла обчислення траєкторії польоту цілі відповідно до обраної гіпотези її руху. Недоліком цього приладу та вузла є виникнення значних помилок при виконанні екстраполяції як у самому a , b-фільтрі, так І при виконанні екстраполяції випереджених координат на час зустрічі гранати з ціллю. Це пов'язане з тим, що ціль може виконувати маневр, наприклад, протизенітний маневр для того, щоб запобігти ураження. Внаслідок цього виникають динамічні помилки як при виконанні фільтрації, так І при розрахунках екстрапольованих координат на випереджений час. Для підвищення точності роботи фільтру в умовах виконання маневру пропонується використання відомих формул для обчислення оцінок параметрів, усереднених по заданих j каналах 0=1.2, ..., к) фільтру (де к може дорівнювати, наприклад, 3), див. "Основы проектирования систем обработки радиолокационной информации", 1986 p. При цьому кожному J-му каналу фільтру по кожній координаті відповідають певні, задані значення прискорення, наприклад, такі: де g - прискорення вільного падіння, та певні, теж задані, початкові значення апріорних імовірностей цих значень прискорення, наприклад, такі: Усереднені оцінки координат та швидкостей їх зміни обчислюються за наступними формулами: де - уточнені оцінки фільтрування координат цілі у j-му каналі фільтру; - уточнені оцінки швидкостей зміни координат цілі у j-му каналі фільтру. Обчислення уточнених оцінок у кожному J-му каналі виконується за допомогою формул: В свою чергу екстрапольовані оцінки координат та швидкостей обчислюються для кожного J-ro каналу фільтра згідно формул. Присутні в формулах фільтровані оцінки координат, затримані на Τ з (п-1)-го крока фільтрації, обчислені за формулами (12), (13). Слід відмітити, що для крока фільтрації п=3 оцінки параметрів з попереднього для всіх трьох каналів фільтра кроку задаються як початкові у вигляді: Коефіцієнти підсилення j-ro каналу при цьому D - це відомий параметр, якому надане значення дисперсії помилки вимірювання координат. Елементи кореляційних матриць помилок екстраполяції по кожному j-му каналу фільтра, які входять до формул (16), обчислюються за наступними формулами: В свою чергу, елементи кореляційних матриць по кожному j-му каналу, затримані на період Τ з попереднього (п-1) кроку фільтрації, обчислені згідно формул: Слід зауважити, що для крока фільтрації п=3 елементи матриць помилок фільтрації з попереднього кроку для всіх каналів фільтра задаються як початкові у вигляді: Вагові функції які мають значення апостеріорних імовірностей прискорення цілі для j-ro каналу фільтру на n-му крвці фільтрації, обчислюються за формулами: де - коефіцієнти згладжування. В свою чергу вирази які входять до (19), є нормованими квадратами нев'язки фільтру по кожній координаті в j-му каналі І обчислюються за формулами: Пои цьому Імовірності (19) І затримані на період Т. У виразі (19) є елементами вже обчислені на попередньому кроці за формулами матриці умовних імовірностей переходу з гіпотези руху з прискоренням на гіпотезу руху з прискоренням . Значення елементів цієї матриці можуть бути заданими із апріорних відомостей про маневр цілі, наприклад такими: Ці відомі формули (1...20) реалізуються у диференційно-згладжувальному вузлі з допомогою так званого адаптивного рекурентного фільтру. Недоліком відомого приладу керування стрільбою, до складу якого входить аналого-цифровий перетворювач поточних координат цілі, диференційно-згладжувальний пристрій, вузол обчислення траєкторії польоту цілі відповідно до обраної гіпотези її руху, вузол Ітераційного обчислення, цифроаналоговий перетворювач, вихідний блок, є: великі витрати часу при обчислюванні згладжених координат цілі та їх перших та других похідних; застосування у вузлі обчислення траєкторії польоту цілі відповідно до обраної гіпотези її руху тільки однієї гіпотези - гіпотези рівномірного та прямолінійного руху цілі, хоча адаптивний рекурентний фільтр має можливість обчислювати та згладжувати параметри руху цілі І для інших гіпотез руху, наприклад, криволінійного руху (маневруюча ціль). В основу винаходу поставлене завдання створити такий прилад керування стрільбою зенітного артилерійського комплексу (наприклад, С-60, КС-19 або 2С6 "Тунгуска"), в якому за рахунок застосування нової керівної ідеї передбачити можливість руху цілі згідно трьох гіпотез; прямолінійного та рівномірного руху; прямолінійного та прискореного руху; криволінійного руху, а також зменшити витрати часу при обчисленні згладжених параметрів руху цілі в умовах виконання маневру цілі за напрямком і по швидкості. Для вирішення цього завдання математичний вираз для екстраполяції траєкторії руху повітряної цілі пропонується у вигляді, який нагадує вираз (9): де Κ1, К 2 - коефіцієнти, які враховують вибрану одну з трьох (L = 1, 2, 3) гіпотез руху цілі. При цьому: при гіпотезі L = 1 прямолінійного та рівномірного руху при гіпотезі L = 2 прямолінійного та рівноприскореного руху - значення величини кута; ω - кутова швидкість траєкторії цілі відносно джерела Інформації; - відносний час екстраполяції; m - ціле число, яке визначає точність розрахунків (наприклад, m = 4); tc - час польоту снаряду. Куто ва швидкість визначається відповідно до формули: де V2 - значення квадрату швидкості цілі, яке розраховується за Формулою Інтенсивність маневру цілі визначимо як Вибір відповідної гіпотези виконується після обчислення значення інтенсивності маневру цілі. Зменшення часу на виконання лічильних операцій при реалізації адаптивного рекурентного фільтру, який входить до складу диференційно-згладжувального пристрою, пропонується шляхом завбачливого розрахунку з допомогою спеціальної методики значень коефіцієнтів Ао, Α1, А2 та їх запам'ятовуванні. Поставлена задача вирішується за рахунок того, що до приладу керування стрільбою зенітної артилерії, який має послідовно з'єднані аналого-цифровий перетворювач поточних координат цілі, диференційнозгладжувальний пристрій, вузол обчислення траєекторії польоту цілі відповідно до обраної гіпотези її руху, вузол ітераційного обчислення, цифроаналоговий перетворювач, ви хідний блок, додатково введені нові вузли, а саме: до диференціно-згладжувального пристрою - вузол запам'ятовування значень коефіцієнтів; у вузол обчислення траєкторії польоту цілі відповідно до обраної гіпотези її руху: вузол обчислення горизонтальної швидкості, вузол обчислення горизонтального прискорення, суматор горизонтальної координати, вузол обчислення вертикальної швидкості, вузол обчислення вертикального прискорення, суматор вертикальної координати, вузол обчислення поперечної швидкості, вузол обчислення поперечного прискорення, суматор поперечної координати, вузол обчислення швидкості, вузол обчислення кутової швидкості, вузол обчислення інтенсивності маневру, вузол обчислення першого коефіцієнту, вузол обчислення другого коефіцієнту, вузол порівняння з пороговими значеннями. При цьому перший, другий та третій виходи аналого-цифрового перетворювача з'єднані з відповідними входами диференційно-згладжувального пристрою, а четвертий вхід з'єднаний з вузлом запам'ятовування значень коефіцієнтів. Перший вихід диференційно-згладжувального пристрою з'єднаний із першим входом вузла обчислення горизонтальної швидкості та з першими входами вузла обчислення швидкості та вузла обчислення кутової швидкості. Другий ви хід диференційно-згладжувального пристрою з'єднаний з другим входом суматора горизонтальної координати, а третій вихід з'єднаний Із першим входом вузла обчислення горизонтального прискорення та з третім входом вузла обчислення кутової швидкості. Виходи вузлів обчислення горизонтальної швидкості та обчислення горизонтального прискорення з'єднані з першим та третім входами відповідно суматора горизонтальної координати, вихід якого з'єднаний з першим входом вузла ітераційного обчислення. Сьомий вихід диференційно-згладжу-вального пристрою з'єднаний з першим входом вузла обчислення вертикальної швидкості, а також з другим входом вузла обчислення швидкості та другим входом вузла обчислення кутової швидкості. Восьмий вихід диференційно-згладжувального пристрою з'єднаний з другим входом суматора вертикальної координати. Дев'ятий вихід ди ференційно-згладжувального пристрою з'єднаний з першим входом вузла обчислення вертикального прискорення та з п'ятим входом вузла обчислення кутової швидкості. Виходи вузла обчислення вертикальної швидкості та вузла обчислення вертикального прискорення з'єднані з першим та третім входами відповідно суматора вертикальної координати, вихід якого з'єднаний з третім входом вузла Ітераційного обчислення. Четвертий вихід ди ференційно-згладжувального пристрою з'єднаний з першим входом вузла обчислення поперечної швидкості, а також з третім входом вузла обчислення швидкості та з четвертим входом вузла обчислення кутової швидкості. П'ятий вихід диференційно-згладжувального пристрою з'єднаний з другим входом суматора поперечної координати. Шостий вихід диференційно-згладжувального пристрою з'єднаний з першим входом вузла обчислення поперечного прискорення та шостим входом вузла обчислення кутової швидкості. Виходи вузлів обчислення поперечної швидкості та обчислення поперечного прискорення з'єднані з першим та третім входами відповідно суматора поперечної координати, вихід якого з'єднаний з другим входом вузла Ітераційного обчислення. Вихід вузла обчислення швидкості з'єднаний з другим входом вузла обчислення Інтенсивності маневру, первий вхід якого з'єднаний з виходом вузла обчислення кутової швидкості. Вихід вузла обчислення Інтенсивності маневру з'єднаний Із входом вузла порівняння з пороговими значеннями. Перший, другий та третій виходи вузла порівняння з пороговими значеннями з'єднані з відповідними входами вузла обчислення першого коефіцієнту, а четвертий, п'ятий та шостий вихід - з першим, другим та третім входами відповідно вузла обчислення другого коефіцієнту. Ви хід вузла обчислення першого коефіцієнту з'єднаний з другими входами вузла обчислення горизонтальної швидкості, вузла обчислення вертикальної швидкості та вузла обчислення поперечної швидкості. Вихід вузла обчислення другого коефіцієнту з'єднаний з другими входами вузла обчислення горизонтального прискорення, вузла обчислення вертикального прискорення та вузла обчислення поперечного прискорення. Функціональні схеми приладу керування стрільбою зенітної артилерії показані на малюнках: Фіг. 1. Функціональна схема запропонованого приладу керування стрільбою зенітної артилерії; Фіг. 2. Функціональна схема прототипу приладу керування стрільбою зенітної артилерії. На фіг. 3 приведені помилки оцінки екстрапольованого значення однієї координати (se) з метою пояснення вибору порогових значень інтенсивності маневру. У складі приладу керування стрільбою зенітної артилерії є такі вузли та блоки: аналого-цифровий перетворювач поточних координат цілі 1; диференційно-згладжу-вальний пристрій 2; вузол обчислення траєкторії польоту цілі відповідно до обраної гіпотези її руху 3; вузол ітераційного ' обчислення 4; цифроаналоговий перетворювач 5; вихідний блок 6 та нові додаткові вузли - вузол запам'ятовування значень коефіцієнтів 7; вузол обчислення горизонтальної швидкості 8; вузол обчислення горизонтального прискорення 9; суматор горизонтальної координати 10: вузол обчислення вертикальної швидкості 11; вузол обчислення вертикального прискорення 12; суматор вертикальної координати 13; вузол обчислення поперечної швидкості 14,- вузол обчислення поперечного прискорення 15; суматор поперечної координати 16; вузол обчислення швидкості 17; вузол обчислення кутової швидкості 18; вузол обчислення інтенсивності маневру 19; вузол порівняння з пороговими значеннями 20; вузол обчислення першого коефіцієнту 21; вузол обчислення другого коефіцієнту 22. Цифрові коди поточних координат цілі х, у, h з виходу аналого-цифрового перетворювача 1 поступають до входу ди ференційно-згладжувального пристрою 2, де в обчислювальних вузлах виконуються операції, які реалізують математичні вирази (9...20). Для прискорення розрахунків в диференційно-згладжувальний пристрій 2 введений новий вузол - вузол запам'ятовування значень коефіцієнтів 7, в пам'яті якого знаходяться такі значення коефіцієнтів згладжування: Ао - 0,65758; А1 -0.203832; А3 = 0,0141796. Ці значення використовуються у вузлі, який провадить розрахунки згідно виразу (19). Обчислені та згладжені координати цілі . а також згладжені параметри руху цілі та . та , та у вигляді цифрових кодів поступають до входу вузла 3 обчислення траєкторії польоту цілі відповідно до обраної гіпотези Π руху. Цей вузол має принципово нове вирішення, тому що в ньому виконується розрахунок екстрапольованої траєкторії цілі на підставі попереднього розрахунку інтенсивності її маневру Jm та провадиться вибір коефіцієнтів Κ1 та К2, які і впливають на вигляд екстрапольованої траєкторії. Тобто вибір гіпотези руху цілі провадиться автоматично з наступним відповідним розрахунком згідно вибраної гіпотези. Вузол обчислення швидкості 17 призначений для 'розрахунку значення швидкості руху цілі згідно математичного виразу (27), для чого на перший його вхід подається цифровий код з першого виходу диференційно-згладжувального пристрою 2, на другий вхід - цифровий код . на третій вхід - цифровий код . Цифровий код величини V з виходу вузла 17 подається на другий вхід вузла обчислення інтенсивності маневру 19. На перший вхід вузла 19 подається цифровий код ω з виходу вузла обчислення кутової швидкості 18. Вузол обчислення Інтенсивності маневру 19 виконує перемноження цифрових кодів ω та V2 згідно математичного виразу (28). Цифровий код значення величини інтенсивності маневру подається з виходу вузла 19 на вхід вузла порівняння з пороговими значеннями 20. Вузол обчислення кутової швидкості 18 призначений для одержання її значення згідно математичного виразу (26), для чого на його перший вхід подається цифровий код значення з першого виходу вузла 2, на другий вхід - цифровий код значення з сьомого виходу вузла 2, на третій вхід -цифровий код значення з третього виходу вузла 2, на четвертий вхід - цифровий код значення на п'ятий вхід - цифровий код значення з четвертого виходу вузла 2, з дев'ятого виходу вузла 2, на шостий вхід -цифровий код значення з шостого ви ходу вузла 2. Вузол порівняння з пороговими значеннями 20 призначений для виконання операції перемикання обчислювальних вузлів на виконання операції розрахунку коефіцієнтів Κ1 та К2 в залежності від автоматично вибраної гіпотези руху цілі. Вибір гіпотези руху виконується шляхом порівняння з заздалегідь вибраними порогами значення Інтенсивності маневру цілі. На фіг. 3 приведені графіки залежності помилок у значенні екстрапольованої координати хе при гіпотезі прямолінійного та рівномірного руху L = 1, при гіпотезі прямолінійного та рівноприскореного руху L = 2, при гіпотезі криволінійного руху L = 3. ЦІ графіки отримані для часу екстраполяції te - 15с. Аналіз графіків показує, що з метою отримання мінімальних помилок треба мати наступні порогові значення інтенсивності маневру: При порівнянні поточної Інтенсивності маневру з пороговими значеннями з першого та четвертого виходів вузла 20 подається командний сигнал на перші входи вузла обчислення першого коефіцієнту 21 та вузол обчислення другого коефіцієнту 22 при виконанні першої нерівності JM1. У цьому разі вузол обчислення першого коефіцієнту 21 та вузол обчислення другого коефіцієнту 22 обчислюють їхні значення згідно з виразом (22). Якщо при порівнянні поточної Інтенсивності маневру з пороговими значеннями з другого та п'ятого ви ходів вузла 20 подається командний сигнал на другі входи вузла обчислення першого коефіцієнту 21 та вузла обчислення другого коефіцієнту 22 при виконанні другої нерівності JM2. то у цьому разі вузол обчислення першого коефіцієнту 21 та вузла обчислення другого коефіцієнту 22 розраховують їхні значення згідно з виразом (23). І нарешті, якщо при порівнянні поточної Інтенсивності маневру з пороговими значеннями з третього та шостого ви ходів вузла 20 подається командний сигнал на треті входи вузла обчислення першого коефіцієнту 21 та вузла обчислення другого коефіцієнту 22 при виконанні третьої нерівності jM3, то у цьому разі вузол обчислення першого коефіцієнту 21 розраховує його значення згідно з виразом (24), а вузол обчислення другого коефіцієнту 22 розраховує його значення згідно з (25). Цифровий код значення коефіцієнту К1 з ви ходу вузла 21 подається на другі входи вузлів обчислення горизонтальної швидкості 8, вертикальної швидкості 11, поперечної швидкості 14. Цифровий код значення коефіцієнту Кг з ви ходу вузла 22 подається на другі входи вузлів обчислення горизонтального прискорення 9, вертикального прискорення 12, поперечного прискорення 15. Вузол обчислення горизонтальної швидкості 8 призначений для перемноження цифрових кодів К1 та . Цифровий код значення подається на перший вхід вузла 8 з першого виходу вузла 2. Вузол обчислення горизонтального прискорення 9 призначений для перемноження цифрових кодів К2 та . Цифровий код значення подається на перший вхід вузла 9 з третього виходу вузла 2. Суматор горизонтальної координати 10 призначений для підсумовування цифрових кодів значень поточної координати , К1 х та К2 х . Для цього цифровий код значення подається з другого виходу вузла 2 на другий вхід суматора 10, а цифровий код значення К1х -на перший вхід вузла 10 з виходу вузла 8, ци фровий код значення К2х - на третій вхід вузла 10 з виходу вузла 9. Після підсумовування цифровий код значення хЄу = + К2 х + К1 х з ви ходу суматора 10 подається на перший вхід вузла 4. Вузол обчислення вертикальної швидкості 11 призначений для перемноження цифрових кодів К1 та Цифровий код значення . подається на перший вхід вузла 11 з сьомого виходу вузла 2. Вузол обчислення вертикального прискорення 12 призначений для перемноження цифрових кодів К2 та . Цифровий код значення подається на перший вхід вузла 12 з дев'ятого ви ходу вузла 2. Суматор вертикальної координати 13 призначений для підсумовування цифрових кодів значень поточної координати , К1 х тa К2х . Для цього цифровий код значення η подається з восьмого виходу вузла 2 на другий вхід суматора 13, цифровий код значення К1х цифровий код значення К2х код значення hey = + К1 х - на перший вхід вузла 13 з виходу вузла 11, а - на третій вхід вузла 13 з виходу вузла 12. Після підсумовування цифровий + К2 х з виходу суматора 13 подається на третій вхід вузла 4. Вузол обчислення поперечної швидкості 14 призначений для перемноження цифрових кодів К1 та . Цифровий код значення уз подається на перший вхід вузла 14 з четвертого виходу вузла 2. Вузол обчислення поперечного прискорення 15 призначений для перемноження цифрових кодів К2 та . Цифровий код значення подається на перший вхід вузла 15 з шостого виходу вузла 2, Суматор поперечної координати 16 призначений для підсумовування цифрових кодів значень поточної координати , К1 х та К 2 . Для цього цифровий код значення 2 на другий вхід суматора 16. цифровий код значення К1· цифровий код значення К2х код значення У еу= + К1 х подається з п'ятого виходу вузла - на перший вхід вузла 16 з виходу вузла 14, а - на третій вхід вузла 16 з виходу вузла 15. Після підсумовування цифровий + К2 х з виходу суматора 16 подається на другий вхід вузла 4.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for zenith artillery fire control
Автори англійськоюBarinholts Tetiana Volodymyrivna, Kozhura Vitalii Vasyliovych, Pivniak Serhii Stepanovych
Назва патенту російськоюУстройство управления стрельбой зенитной артиллерии
Автори російськоюБарінгольц Татьяна Владимировна, Кожура Виталий Васильевич, Пивняк Сергей Степанович
МПК / Мітки
МПК: G06F 15/00, F41G 3/08
Мітки: керування, стрільбою, прилад, артилерії, зенітної
Код посилання
<a href="https://ua.patents.su/11-10708-prilad-keruvannya-strilboyu-zenitno-artileri.html" target="_blank" rel="follow" title="База патентів України">Прилад керування стрільбою зенітної артилерії</a>
Прилад керування стрільбою зенітної артилерії
Номер патенту: 10639
Опубліковано: 25.12.1996
Автори: Гузь Володимир Іванович, Кожура Віталій Васильович, Карпухін Олександр Володимирович
МПК: F41G 3/00
Мітки: артилерії, зенітної, прилад, керування, стрільбою
Формула / Реферат:
Прилад керування стрільбою зенітної артилерії, який має послідовно з'єднані аналого-цифровий перетворювач поточних координат цілі, диференційно - згладжувальний пристрій, вузол обчислення траєкторії польоту цілі відповідно до обраної гіпотези її руху, вузол ітераційного обчислення, цифроаналоговий перетворювач і вихідний блок, а також послідовно з'єднані телевізійну камеру, проміжний блок і відеопереглядорий пристрій, який відрізняється...
Прилад керування стрільбою зенітної артилерії
Номер патенту: 10643
Опубліковано: 25.12.1996
Автори: Півняк Сергій Степанович, Гузь Володимир Іванович, Карпухін Олександр Володимирович, Кожура Віталій Васильович
МПК: G06F 15/00, F41G 3/08
Мітки: зенітної, прилад, стрільбою, артилерії, керування
Формула / Реферат:
Прибор управления стрельбой зенитной артиллерии, содержащий последовательно соединенные аналого-цифровой преобразователь текущих координат цели, дифференцирующе-сглаживающее устройство, узел вычисления траектории полета цели в соответствии с выбранной гипотезой ее движения, узел итерационного вычисления, цифроаналоговый преобразователь и выходной блок, а также узел вычисления поправок и блок ввода поправок на изменение метеорологических...
Пристрій керування переміщенням дверей
Номер патенту: 1762
Опубліковано: 25.10.1994
Автори: Кондратик Володимир Васильович, Лукавий Роман Мирославович
МПК: G05B 19/19
Мітки: переміщенням, пристрій, керування, дверей
Формула / Реферат:
Устройство управления перемещением дверей, содержащее установленные в зоне движения дверей датчики контроля движущегося объекта и датчики контроля скорости движения дверей, соединенные выходами с входами блока формирования управляющих сигналов, связанного выходами через блок управления электроприводом с электроприводом, кинематически соединенным с дверями, отличающееся тем, что оно снабжено блоком контроля порогового значения скорости...
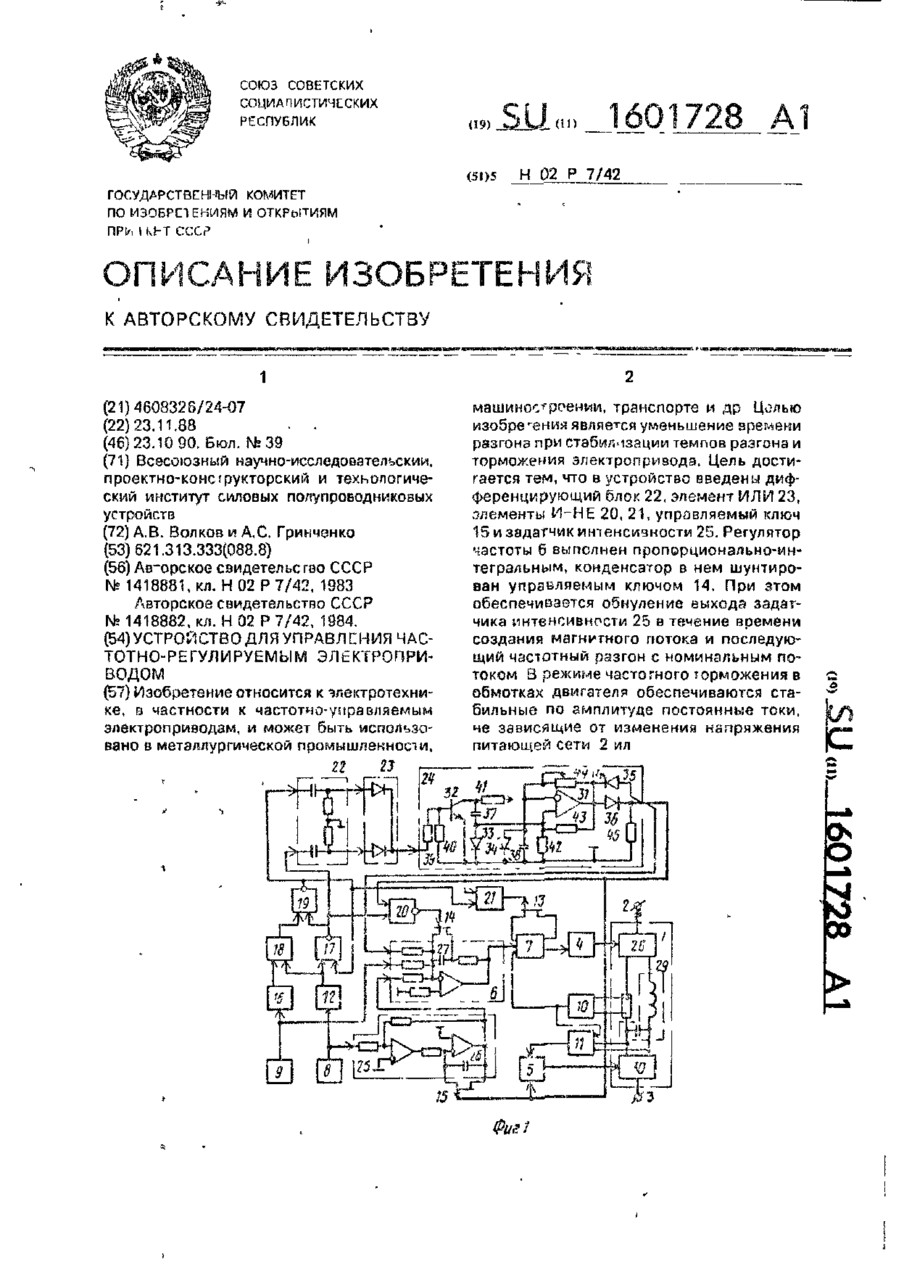
Пристрій для керування частотно-регулівним електроприводом
Номер патенту: 8822
Опубліковано: 30.09.1996
Автори: Грінченко Олександр Семенович, Волков Олександр Васильович
МПК: H02P 27/04
Мітки: частотно-регулівним, керування, електроприводом, пристрій
Формула / Реферат:
Устройство для управления частотно-регулируемым электроприводом, содержащее статический преобразователь частоты, снабженный клеммами для подключения питающей сети и асинхронного двигателя, системы управления напряжением и частотой, подключенные выходами к соответствующим управляющим входам статического преобразователя частоты, регулятор частоты и регулятора тока, каждый с двумя входами, узел задания, датчик частоты вращения, датчики тока...
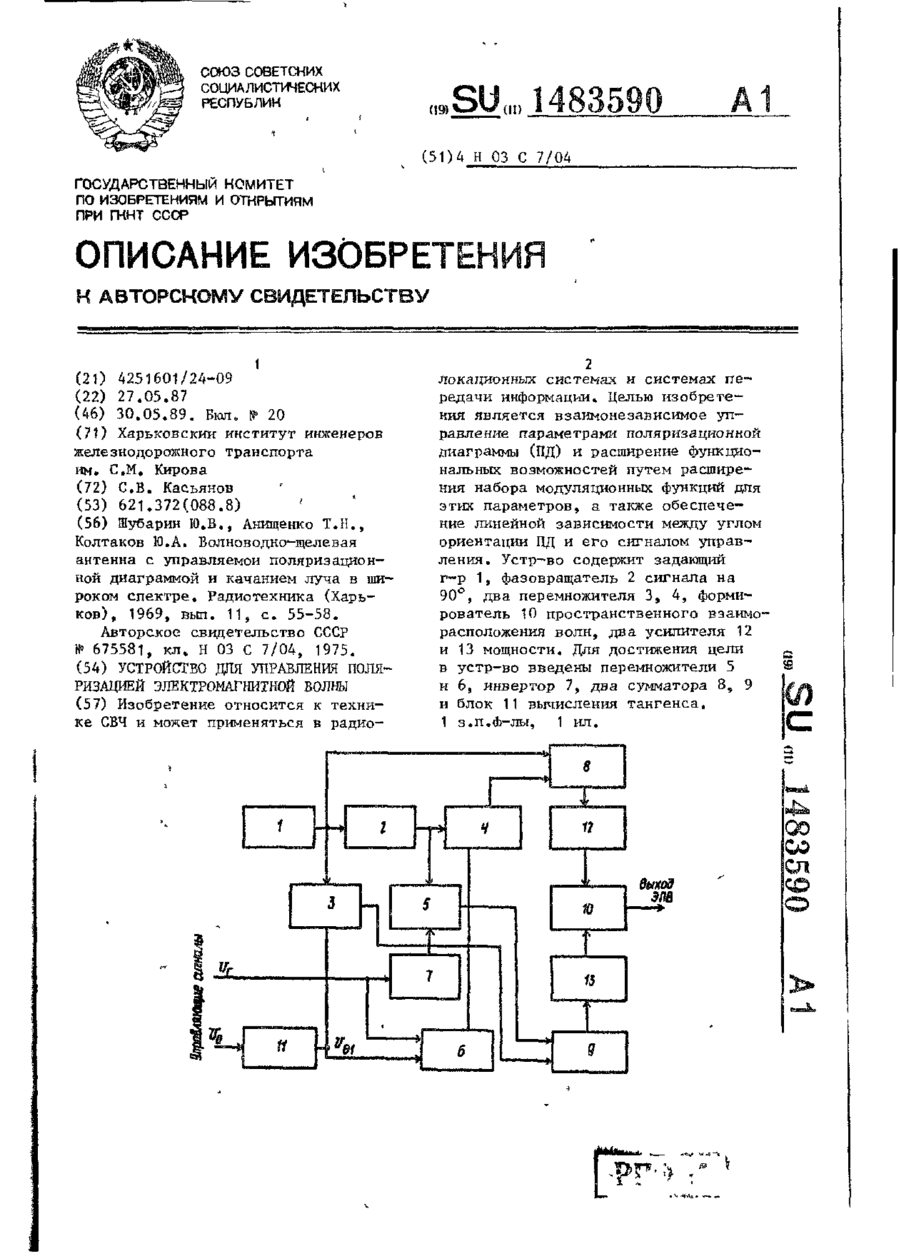
Пристрій для керування поляризацією електромагнітної хвилі
Номер патенту: 8176
Опубліковано: 29.03.1996
Автор: Касьянов Сергій Володимирович
МПК: H03C 7/00
Мітки: пристрій, хвилі, керування, поляризацією, електромагнітної
Формула / Реферат:
1. Устройство для управления поляризацией электромагнитной волны, содержащее задающий генератор, выход которого подключен к первому входу первого перемножителя, фазовращатель на 90°, второй персмножитсль и формирователь пространственного взаиморасположения волн, выход которого является выходом устройства, отличающееся тем, что, с целью взаимонезависимого управления параметрами поляризационной диаграммы и расширения функциональных...
Попередній патент: Прилад керування стрільбою зенітної артилерії
Наступний патент: Мостовий кран
Випадковий патент: Полімерна композиція