Ваги вагонні дво- або триплатформні з визначенням відхилення центру тяжіння вагона
Номер патенту: 51330
Опубліковано: 12.07.2010
Автори: Бугаєнко Єгор Георгійович, Бугаєнко Георгій Якович, Бугаєнко Максим Георгійович
Формула / Реферат
Ваги вагонні дво- або триплатформні з визначенням відхилень центру тяжіння вагона, які мають дві або три платформи, кожна з яких спирається на чотири ваговимірювальні датчики, мікропроцесорний контролер, в складі якого є енергонезалежна пам'ять, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло та інтерфейс для підключення каналів телеметрії, які відрізняються тим, що в них введені шість суматорів, шість аналого-цифрових перетворювачів, клавіатура та індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний зі входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера, вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора, при цьому відхилення центру тяжіння вагона відносно повздовжньої осі вираховується мікропроцесорним контролером по формулі:
![]() ,
,
а відхилення центру тяжіння вагона відносно поперечної осі вираховується мікропроцесорним контролером по формулі:
![]() ,
,
при цьому в цих формулах:
![]() - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії;
- відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії;
![]() - база вагона;
- база вагона;
![]() - маса лівого та правого бортів вагона, відповідно, які вираховуються по формулах:
- маса лівого та правого бортів вагона, відповідно, які вираховуються по формулах:
![]() ,
,
![]() ,
,
![]() - маси першого, другого та третього візків, що зважуються, які вираховуються по формулах:
- маси першого, другого та третього візків, що зважуються, які вираховуються по формулах:
![]() ,
,
![]() ,
,
![]() ,
,
де ![]() - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка, лівого борту третього візка, правого борту третього візка.
- маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка, лівого борту третього візка, правого борту третього візка.
Текст
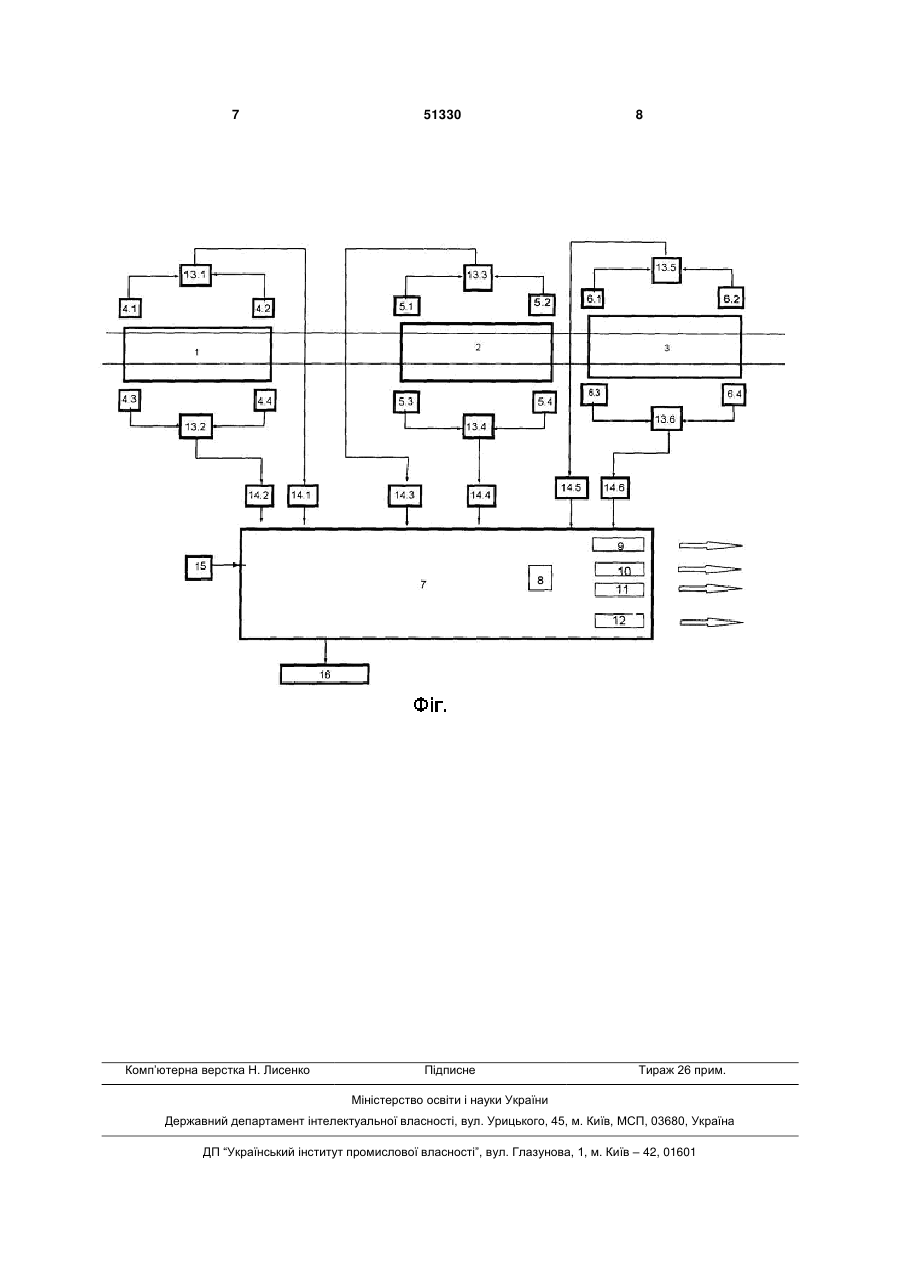
Ваги вагонні дво- або триплатформні з визначенням відхилень центру тяжіння вагона, які мають дві або три платформи, кожна з яких спирається на чотири ваговимірювальні датчики, мікропроцесорний контролер, в складі якого є енергонезалежна пам'ять, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло та інтерфейс для підключення каналів телеметрії, які відрізняються тим, що в них введені шість суматорів, шість аналого-цифрових перетворювачів, клавіатура та індикатор, причому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний зі входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера, вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора, при цьому відхилення центру тяжіння вагона відносно повздов 3 51330 зважувань, лікує масу «нетто» вантажу, забезпечує документовану реєстрацію результатів зважувань, має стандартні інтерфейси для підключення ПЄОМ, друкуючого пристрою, виносного інформаційного табло та каналів телеметрії (див. «Весы, весовые дозаторы, системы взвешивания и дозирования. Справочник. Одесса, «Астропринт» 2001 г. ВЕСЫ ВАГОННЫЕ ЭЛЕКТРОМЕХАНИЧЕСКИЕ ВВС - 150/25. Изготовитель НПК «Сонарус», г. Одесса, Украина). Недоліком цього пристрою є неможливість визначення центра тяжіння вагону та його відхилення від поздовжньої осі, а також неможливість зважування такої номенклатури вагонів, яка потребує для цього зважування трьох платформ. Метою корисної моделі є визначення відхилення центра тяжіння вагона відносно повздовжньої та поперечної осей при зважуванні номенклатури вагонів, яка потребує для цього двох або трьох платформ. Поставлена мета досягається тим, що в відомих вагах, які складаються з платформ, кожна з яких спирається на чотири ваговимірювальні датчики, які встановлені по кутам платформи, та мікропроцесорного контролеру, який має в своєму складі енергонезалежну пам'ять для зберігання результатів зважувань, інтерфейс для підключення принтеру, інтерфейс для підключення ПЄОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, введені шість суматорів, при чому на два входи кожного з суматорів підведені виходи двох ваговимірювальних датчиків, які встановлені по один бік кожної платформи, а вихід кожного суматора зв'язаний зі входом аналого-цифрового перетворювача, вихід якого підключений до відповідного входу мікропроцесорного контролера, вихід клавіатури підключений до входу мікропроцесорного контролера, а вихід контролера підключений до входу індикатора, при цьому відхилення центру тяжіння вагона відносно повздовжньої осі вираховується по формулі L Gлб Gпб , y 2Gв а відхилення центру тяжіння вагона відносно поперечної осі вираховується по формулі Б Gm1 Gm2 , х 2Gв де: L - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії, мм; Б - база вагону, мм; Gлб , Gпб - маса лівого та правого бортів вагону, відповідно, які вираховується по формулах: Gлб G1лб G2лб G3 лб , Gпб G1пб G2пб G3пб Gm1, Gm2 - маса першого та другого візків, відповідно, які вираховується по формулах: Gm1 G1лб G1пб G3пб , Gm2 G2лб G2пб G3пб , 4 де G1пб, G1пб, G2лб , G2пб, G3 лб , G3пб - маса, відповідно, лівого борту першого візка, правого борту першого візка, лівого борту другого візка, правого борту другого візка, лівого борту третього візка, правого борту третього візка. Таким чином, в результаті роботи пристрою на індикаторі виникає інформація про фактичне відхилення центра тяжіння вагону відносно кожної з осей, а це дає можливість оператору ваг скорегувати процес завантаження вагону таким чином, щоб допуски, які вимагає залізниця, були виконані. Дана сукупність суттєвих ознак дозволяє, в порівнянні з найближчим аналогом, забезпечити відповідність вимогам залізниці кожного вагона, який зважується на цих вагах та уникати штрафів за некоректне положення вантажу у вагоні. Структурна схема ваг, що пропонується, відображена на Фіг. Пристрій, що пропонується, має три платформи 1, 2 та 3, кожна з яких спирається на чотири ваговимірювальні датчики 4.1, 4.2, 4.3, 4.4 на першій платформі, на чотири ваговимірювальні датчики 5.1, 5.2, 5.3, 5.4 на другій платформі, на чотири ваговимірювальні датчики 6.1, 6.2, 6.3, 6.4 на третій платформі, мікропроцесорного контролера 7, який має в енергонезалежну пам'ять 8 для зберігання результатів зважувань, інтерфейс 9 для підключення принтеру, інтерфейс 10 для підключення ПЄОМ, інтерфейс 11 для підключення виносного інформаційного табло, інтерфейс 12 для підключення каналів телеметрії, а також шість суматорів 13.1, 13.2, 13.3, 13.4, 13.5, 13.6 сигналів датчиків ваговимірювальних, шість аналогоцифрових перетворювача 14.1, 14.2, 14.3, 14.4, 14.5 , 14.6, клавіатуру 15 та індикатор 16. Пристрій працює таким чином. Кожен візок вагону розміщується на своїй платформі, а сигнали від датчиків ваговимірювальних складаються попарно кожним суматором. Таким чином, на виході суматора 13.1 виникає сигнал, який є сумою сигналів датчиків 4.1 та 4.2. Ця сума, яка пропорційна масі лівої сторони першого візка, перетворюється за допомогою аналого-цифрового перетворювача 14.1 а цифровий код, який поступає на вхід мікропроцесорного контролера 7. На виході суматора 13.2 виникає сигнал, який є сумою сигналів датчиків 4.3 та 4.4. Ця сума, яка пропорційна масі правої сторони першого візка, перетворюється за допомогою аналого-цифрового перетворювача 14.2 а цифровий код, який поступає на вхід мікропроцесорного контролера 7. На виході суматора 13.3 виникає сигнал, який є сумою сигналів датчиків 5.1 та 5.2. Ця сума, яка пропорційна масі лівої сторони другого візка, перетворюється за допомогою аналого-цифрового перетворювача 14.3 а цифровий код, який поступає на вхід мікропроцесорного контролера 7. На виході суматора 13.4 виникає сигнал, який є сумою сигналів датчиків 5.3 та 5.4. Ця сума, яка пропорційна масі лівої сторони другого візка, перетворюється за допомогою аналого-цифрового перетворювача 14.4 а цифровий код, який поступає на вхід мікропроцесорного контролера 7. 5 На виході суматора 13.5 виникає сигнал, який є сумою сигналів датчиків 6.1 та 6.2. Ця сума, яка пропорційна масі лівої сторони третього візка, перетворюється за допомогою аналого-цифрового перетворювача 14.5 а цифровий код, який поступає на вхід мікропроцесорного контролера 7. На виході суматора 13.6 виникає сигнал, який є сумою сигналів датчиків 6.3 та 6.4. Ця сума, яка пропорційна масі лівої сторони третього візка, перетворюється за допомогою аналого-цифрового перетворювача 14.6 а цифровий код, який поступає на вхід мікропроцесорного контролера 7. В залежності від того, на яких платформах знаходяться візки вагона, що зважуються, оператор ваг вибирає необхідну комбінацію платформ («перша-друга», «перша-третья», «друга-третя») і, таким чином, дає вказівку мікропроцесорному прибору, які з сигналів приймати в обробку. Так, наприклад, якщо візки знаходяться на першій і другій платформах, вибирається комбінація «перша-друга» і контролер бере до розрахунку сигнали з аналого-цифрових перетворювачів 14.1, 14.2 для першого візку, та сигнали з аналого-цифрових перетворювачів 14.3 та 14.4 - для другого візку. Якщо візки знаходяться на першій і третій платформах, вибирається комбінація «перша-третя» і контролер бере до розрахунку сигнали з аналогоцифрових перетворювачів 14.1, 14.2 - для першого візку, та сигнали з аналого-цифрових перетворювачів 14.5 та 14.6 - для другого візку. Якщо візки знаходяться на другій і третій платформах, вибирається комбінація «друга-третя» і контролер бере до розрахунку сигнали з аналого-цифрових перетворювачів 14.3, 14.4 - для першого візку, та сигнали з аналого-цифрових перетворювачів 14.5 та 14.6 - для другого візку. Мікропроцесорний контролер 7 сумує сигнали з виходів аналого-цифрових перетворювачів 14.1 і 14.2; 14.3 і 14.4 та 14.5 і 14.6, в результаті чого получає сигнал Gm1 , пропорційній масі першого візка, сигнал Gm2 , пропорційній масі другого візка та сигнал Gm3 , пропорційній масі третього візка. Мікропроцесорний контролер 7 сумує також сигнали з виходів аналого-цифрових перетворювачів 14.1, 14.3 і 14.5, в результаті чого получає сигнал Gлб , пропорційній масі лівого боку вагона, а сума сигналів від виходів суматорів 14.2, 14.4 і 14.6 дає масу Gпб правого боку вагона. Мікропроцесорний контролер 7 вираховує відхилення y центру тяжіння вагону відносно повздовжньої осі по формулі: L Gлб Gпб L Gлб Gпб , y 2 Gm1 Gm2 2Gв Мікропроцесорний контролер 5 вираховує відхилення А, центру тяжіння вагону відносно поперечної осі по формулі: Б Gm1 Gm2 Б Gm1 Gm2 , х 2 Gm1 Gm2 2Gв В цих формулах: L - відстань між осями ваговимірювальних датчиків, які знаходяться по обидві сторони колії 51330 6 (мм) та Б - база вагону (мм) - параметри, які вводяться до мікропроцесорного контролеру 7 з клавіатури 15; Gлб , Gпб - маса лівого та правого бортів вагону, відповідно, які вираховуються мікропроцесорним контролером 5 по формулах: Gлб G1лб G2лб G3 лб , Gпб G1пб G2пб G3пб Gm1,Gm2 - маса першого та другого візків, ві дповідно, які вираховуються мікропроцесорним контролером 7 по формулах: Gm1 G1лб G1пб , Gm2 G2лб G2пб , Gm3 G3 лб G3пб де G1пб, G1пб, G2лб , G2пб, G3 лб , G3пб - маса, відповідно, лівого борту першого візка, маса правого борту першого візка, маса лівого борту другого візка, маса правого борту другого візка, маса лівого борту третього візка, маса правого борту третього візка відповідно, сигнали про які з'являються на виходах суматорів 13.1, 13.2, 13.3, 13.4, 13.5, 13.6, відповідно, та через аналого-цифрові перетворювачі 14.1, 14.2, 14.3, 14.4, 14.5 ти 14.6, відповідно, поступають на входи мікропроцесорного контролера 7. Всі результати вирахування передаються мікропроцесорним контролером до індикатора 16 та відображаються на ньому, що дає можливість оператору контролювати процес завантаження вагону та впливати, при необхідності, на нього. Викладене вище підтверджує наявність причинно-наслідкових зв'язків між сукупністю суттєвих ознак винаходу, що заявляється, та технічним результатом, що досягається. Дана сукупність суттєвих ознак дозволяє, в порівнянні з найближчим аналогом, визначити відхилення центра тяжіння вагона любої конструкції відносно повздовжньої та поперечної осей що, в свою чергу, дає можливість вдоволення потреб залізниці у центруванні вантажу вагонів при їх відвантаженні. На думку автора, технічне рішення, що заявляється, відповідає критерію "новизна", тому що сукупність суттєвих ознак, які характеризують ваги вагонні двох або трьох платформи з визначенням відхилень центру тяжіння вагону, є новою. На думку автора, технічне рішення, що заявляється, відповідає критерію "корисний ефект", тому що сукупність суттєвих ознак, які характеризують ваги вагонні двох або трьох платформні з визначенням відхилень центру тяжіння вагону, дає можливість контролювати рівномірність розміщення вантажу у вагоні в процесі самого завантаження, не допускаючи, таким чином, несанкціонованих відхилень. Пропоновані ваги введені в експлуатацію на ВАТ «Полтавський гірничо-збагачувальний комбінат» та ВАТ «Кременчуцький вагонобудівний завод». 7 Комп’ютерна верстка Н. Лиcенко 51330 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCar weight two or three-platform with determination of deflection of center of gravity of car
Автори англійськоюBuhaienko Heorhii Yakovych, Buhaienko Yehor Heorhiiovych, Buhaienko Maksym Heorhiiovych
Назва патенту російськоюВесы вагонные двух- или трехплатформные с определением отклонения центра тяжести вагона
Автори російськоюБугаенко Георгий Яковлевич, Бугаенко Егор Георгиевич, Бугаенко Максим Георгиевич
МПК / Мітки
МПК: G01G 19/00
Мітки: дво, вагона, відхілення, вагонні, визначенням, центру, ваги, тяжіння, триплатформні
Код посилання
<a href="https://ua.patents.su/4-51330-vagi-vagonni-dvo-abo-triplatformni-z-viznachennyam-vidkhilennya-centru-tyazhinnya-vagona.html" target="_blank" rel="follow" title="База патентів України">Ваги вагонні дво- або триплатформні з визначенням відхилення центру тяжіння вагона</a>
Ваги вагонні з визначенням відхилень центра ваги вагона
Номер патенту: 47685
Опубліковано: 25.02.2010
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/00
Мітки: ваги, вагона, відхилень, визначенням, вагонні, центра
Формула / Реферат:
Ваги вагонні з визначенням відхилень центра ваги вагона, що містять дві вантажоприймальні платформи, кожна з яких спирається на чотири ваговимірювальні датчики, встановлені по кутах платформи, мікропроцесорний контролер з енергонезалежною пам'яттю, інтерфейс для підключення принтера, інтерфейс для підключення ПЕОМ, інтерфейс для підключення виносного інформаційного табло, інтерфейс для підключення каналів телеметрії, введені чотири суматори,...
Гаситель коливань візка вантажного вагона
Номер патенту: 66942
Опубліковано: 15.06.2004
Автори: Кочмала Григорій Данилович, Дьомін Юрій Васильович
МПК: B61F 5/02
Мітки: коливань, візка, гаситель, вантажного, вагона
Формула / Реферат:
Гаситель коливань візка вантажного вагона, що складається з двох фрикційних клинів, встановлених на пружних елементах ресорного підвішування візка та виконаних з можливістю взаємодії з похилими частинами надресорної балки і фрикційними планками бічної рами візка, який відрізняється тим, що кожний фрикційний клин гасителя коливань виконано з двох частин - корпуса та сегмента, шарнірно з'єднаних між собою, при цьому циліндрична поверхня, за...
Спосіб дистанційного виявлення дефектного візка вагона потяга

Номер патенту: 14542
Опубліковано: 15.05.2006
Автор: Парфьонов Володимир Іванович
МПК: B61L 25/00
Мітки: вагона, дефектного, візка, виявлення, спосіб, потяга, дистанційного
Формула / Реферат:
Спосіб дистанційного виявлення дефектного візка вагона потяга, при якому механічні дефекти візка за допомогою тензометричних датчиків перетворюють в електричні імпульси, які передають по лінії зв'язку на станцію, який відрізняється тим, що тензометричні датчики встановлюють на попередньо звуженій прямолінійній ділянці залізничної колії.
Ваги для вимірювання маси рухомих вагонів
Номер патенту: 49962
Опубліковано: 15.10.2002
Автори: Марцикевич Олександр Петрович, Дашевський Яків Тевелевич
МПК: G01G 19/04
Мітки: ваги, вимірювання, маси, рухомих, вагонів
Формула / Реферат:
Залізничні ваги для вимірювання маси рухомих вагонів, які містять кілька послідовно установлених вантажоприймальних платформ, які опираються на силовимірювальні датчики, багатоканальний аналого-цифровий перетворювач, з'єднаний своїми виходами з суматорами каналів візків і входом пристрою індикації і реєстрації, які відрізняються тим, що ваги мають схему вибору вантажоприймальних платформ, при цьому виходи силовимірювальних датчиків кожної...
Гальмові системи, чутливі до маси транспортного засобу, для залізничного вагона та для візка вагона і гальмовий вузол вагона
Номер патенту: 90678
Опубліковано: 25.05.2010
Автор: Рінг Майкл Е.
МПК: B61H 13/00, B60T 8/18
Мітки: чутливі, гальмовий, вузол, системі, візка, гальмові, залізничного, транспортного, вагона, засобу, маси
Формула / Реферат:
1. Гальмова система, чутлива до маси транспортного засобу, для залізничного вагона (2), яка містить керуючий клапан (120), який розподіляє тиск текучого середовища, яка відрізняється тим, що керуючий клапан включає в себе клапанний засіб (100), який включає в себе лінійно рухомий засіб (110), який виконаний з можливістю зворотно-поступального руху і має перший кінець, який виконаний з можливістю взаємодії з залізничним вагоном (2),...
Попередній патент: Спосіб виробництва принади для перорального введення активної імунізаційної речовини тваринам
Наступний патент: Спосіб хірургічного лікування вроджених катаракт із первинною ендокапсулярною імплантацією інтраокулярної лінзи при синдромі персистуючої фетальної судинної сітки
Випадковий патент: Пристрій для лазеротерапії хронічних уретропростатитів