Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнання ла для лвс
Номер патенту: 52934
Опубліковано: 10.09.2010
Автори: Воронов Дмитро Миколайович, Садовий Костянтин Віталійович, Клівець Сергій Іванович, Злотніков Андрій Львович, Воробйов Руслан Володимирович, Васильєв Дмитро Геннадійович, Рисований Олександр Миколайович, Балабуха Олексій Сергійович, Коломійцев Олексій Володимирович, Копилов Олександр Олексійович
Формула / Реферат
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ЛА для ЛВС, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери, схеми "і", резонансні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину та блоки відображення інформації, ![]() vм оп - введення опорних сигналів з частотами міжмодових биттів (
vм оп - введення опорних сигналів з частотами міжмодових биттів (![]() vм оп, 2
vм оп, 2![]() vм оп, 3
vм оп, 3![]() vм оп, 6
vм оп, 6![]() vм оп) від передавального лазера, який відрізняється тим, що після ШП додатково введено блок розпізнавання із б - введення сигналу від каналу вимірювання тангенціальної складової швидкості (кутових швидкостей) літального апарата.
vм оп) від передавального лазера, який відрізняється тим, що після ШП додатково введено блок розпізнавання із б - введення сигналу від каналу вимірювання тангенціальної складової швидкості (кутових швидкостей) літального апарата.
Текст
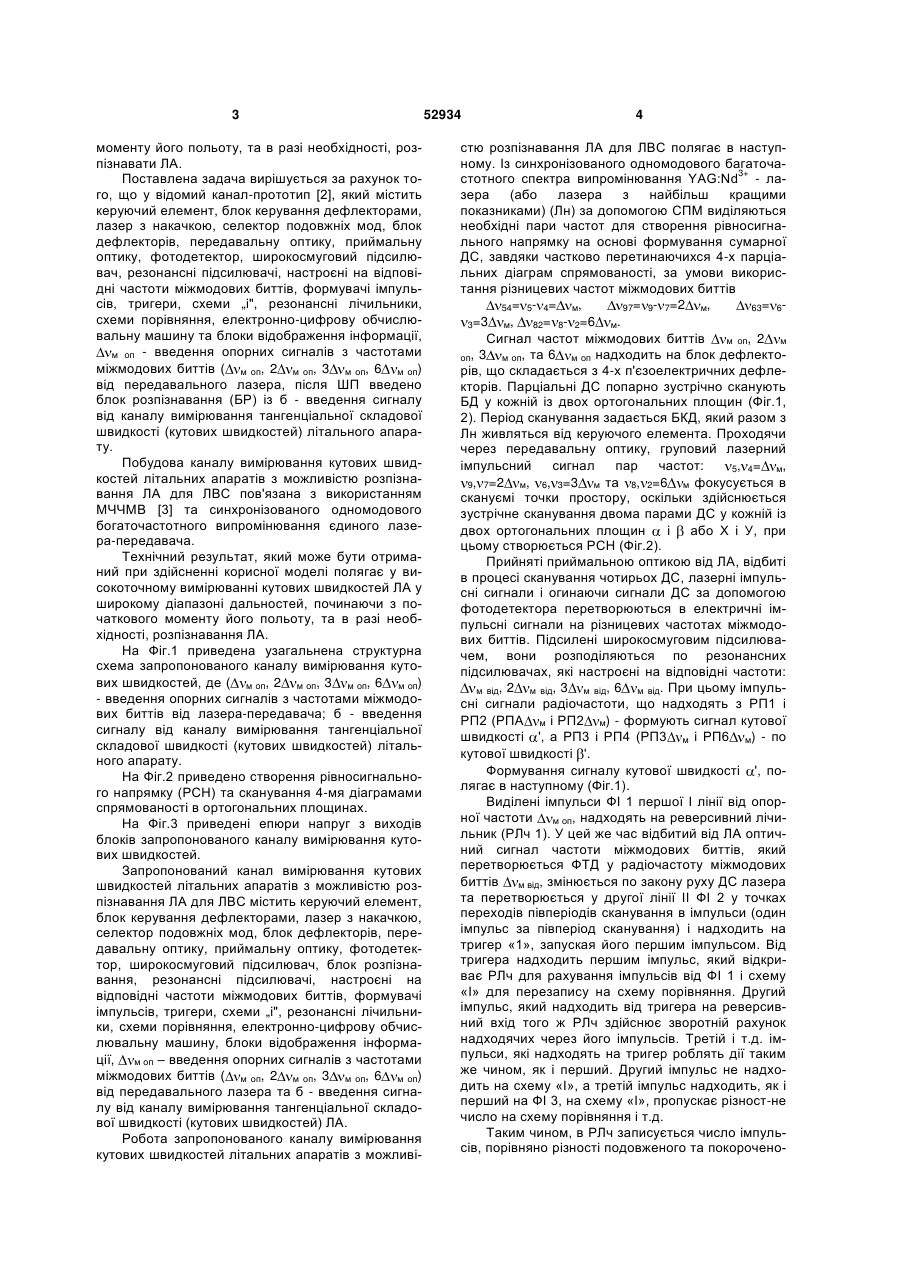
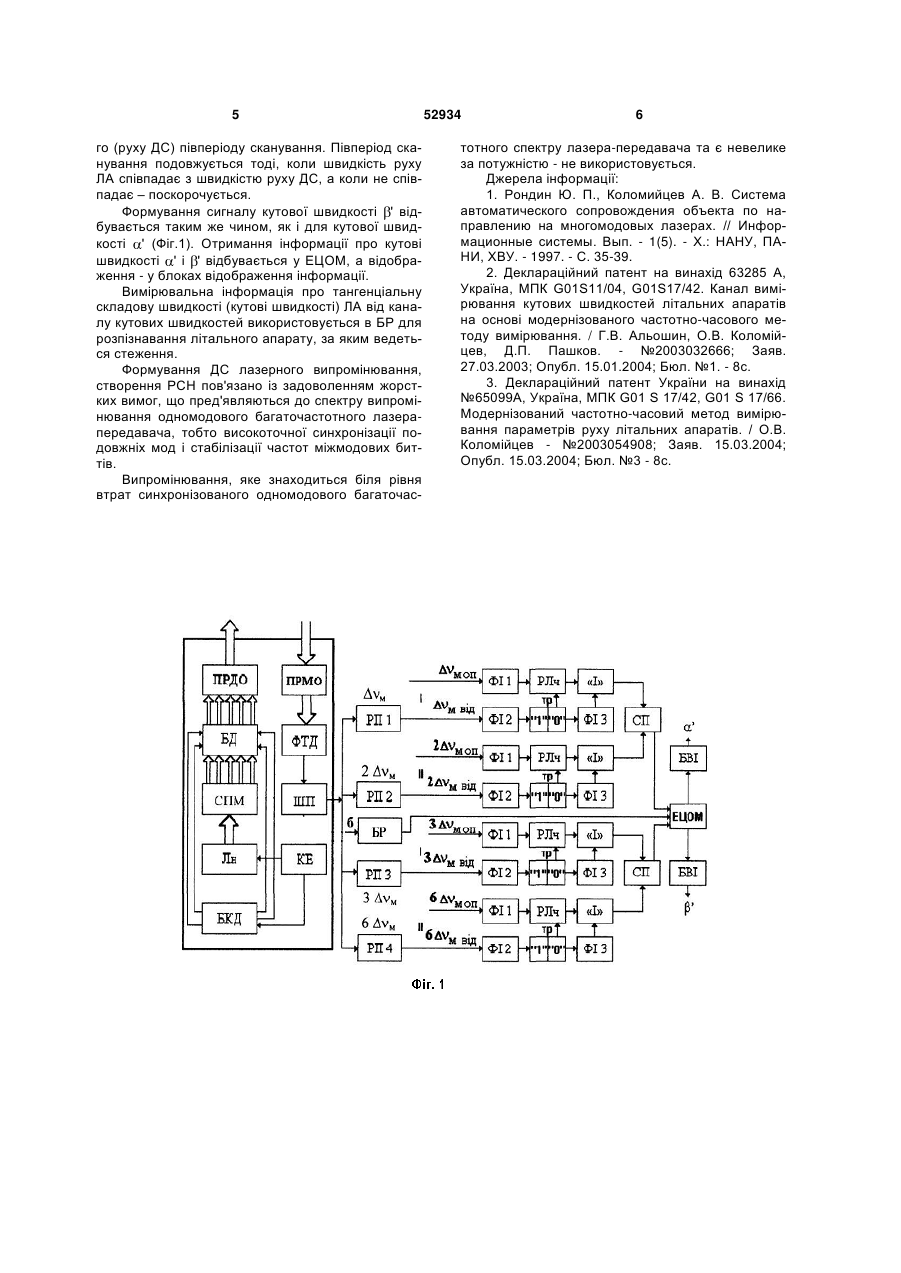
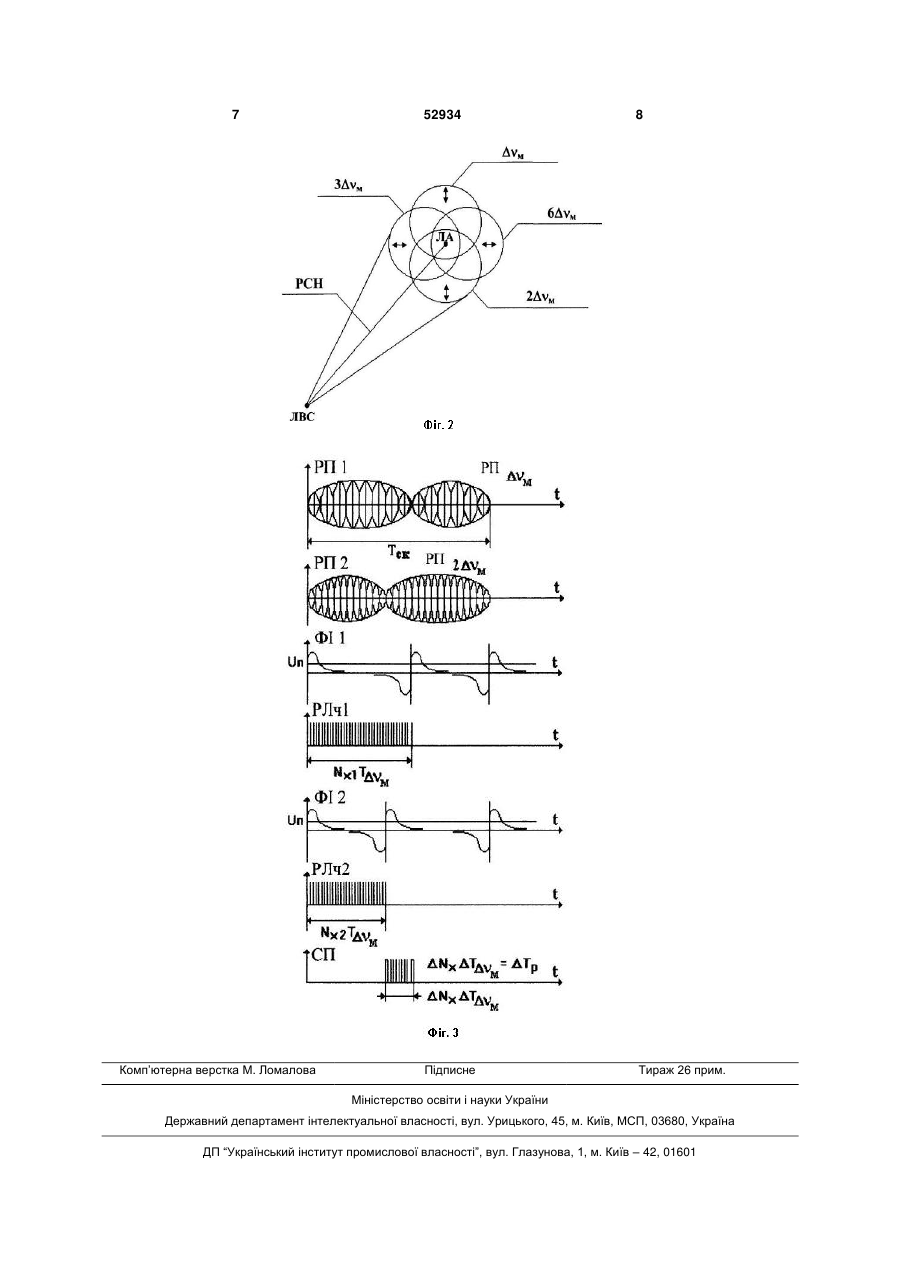
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ЛА для ЛВС, який містить керуючий елемент, блок 3 моменту його польоту, та в разі необхідності, розпізнавати ЛА. Поставлена задача вирішується за рахунок того, що у відомий канал-прототип [2], який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери, схеми „і", резонансні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину та блоки відображення інформації, м оп - введення опорних сигналів з частотами міжмодових биттів ( м оп, 2 м оп, 3 м оп, 6 м оп) від передавального лазера, після ШП введено блок розпізнавання (БР) із б - введення сигналу від каналу вимірювання тангенціальної складової швидкості (кутових швидкостей) літального апарату. Побудова каналу вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ЛА для ЛВС пов'язана з використанням МЧЧМВ [3] та синхронізованого одномодового богаточастотного випромінювання єдиного лазера-передавача. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у високоточному вимірюванні кутових швидкостей ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, та в разі необхідності, розпізнавання ЛА. На Фіг.1 приведена узагальнена структурна схема запропонованого каналу вимірювання кутових швидкостей, де ( м оп, 2 м оп, 3 м оп, 6 м оп) - введення опорних сигналів з частотами міжмодових биттів від лазера-передавача; б - введення сигналу від каналу вимірювання тангенціальної складової швидкості (кутових швидкостей) літального апарату. На Фіг.2 приведено створення рівносигнального напрямку (РСН) та сканування 4-мя діаграмами спрямованості в ортогональних площинах. На Фіг.3 приведені епюри напруг з виходів блоків запропонованого каналу вимірювання кутових швидкостей. Запропонований канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ЛА для ЛВС містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, блок розпізнавання, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери, схеми „і", резонансні лічильники, схеми порівняння, електронно-цифрову обчислювальну машину, блоки відображення інформації, м оп – введення опорних сигналів з частотами міжмодових биттів ( м оп, 2 м оп, 3 м оп, 6 м оп) від передавального лазера та б - введення сигналу від каналу вимірювання тангенціальної складової швидкості (кутових швидкостей) ЛА. Робота запропонованого каналу вимірювання кутових швидкостей літальних апаратів з можливі 52934 4 стю розпізнавання ЛА для ЛВС полягає в наступному. Із синхронізованого одномодового багаточастотного спектра випромінювання YAG:Nd3+ - лазера (або лазера з найбільш кращими показниками) (Лн) за допомогою СПМ виділяються необхідні пари частот для створення рівносигнального напрямку на основі формування сумарної ДС, завдяки частково перетинаючихся 4-х парціальних діаграм спрямованості, за умови використання різницевих частот міжмодових биттів 54= 5- 4= м, 97= 9- 7=2 м, 63= 63=3 м, 82= 8- 2=6 м. Сигнал частот міжмодових биттів м оп, 2 м оп, 3 м оп, та 6 м оп надходить на блок дефлекторів, що складається з 4-х п'єзоелектричних дефлекторів. Парціальні ДС попарно зустрічно сканують БД у кожній із двох ортогональних площин (Фіг.1, 2). Період сканування задається БКД, який разом з Лн живляться від керуючого елемента. Проходячи через передавальну оптику, груповий лазерний імпульсний сигнал пар частот: 5, 4= м, 9, 7=2 м, 6, 3=3 м та 8, 2=6 м фокусується в скануємі точки простору, оскільки здійснюється зустрічне сканування двома парами ДС у кожній із двох ортогональних площин і або X і У, при цьому створюється РСН (Фіг.2). Прийняті приймальною оптикою від ЛА, відбиті в процесі сканування чотирьох ДС, лазерні імпульсні сигнали і огинаючи сигнали ДС за допомогою фотодетектора перетворюються в електричні імпульсні сигнали на різницевих частотах міжмодових биттів. Підсилені широкосмуговим підсилювачем, вони розподіляються по резонансних підсилювачах, які настроєні на відповідні частоти: м від, 2 м від, 3 м від, 6 м від. При цьому імпульсні сигнали радіочастоти, що надходять з РП1 і РП2 (РПА м і РП2 м) - формують сигнал кутової швидкості ', а РП3 і РП4 (РП3 м і РП6 м) - по кутової швидкості '. Формування сигналу кутової швидкості ', полягає в наступному (Фіг.1). Виділені імпульси ФІ 1 першої І лінії від опорної частоти м оп, надходять на реверсивний лічильник (РЛч 1). У цей же час відбитий від ЛА оптичний сигнал частоти міжмодових биттів, який перетворюється ФТД у радіочастоту міжмодових биттів м від, змінюється по закону руху ДС лазера та перетворюється у другої лінії II ФІ 2 у точках переходів півперіодів сканування в імпульси (один імпульс за півперіод сканування) і надходить на тригер «1», запуская його першим імпульсом. Від тригера надходить першим імпульс, який відкриває РЛч для рахування імпульсів від ФІ 1 і схему «І» для перезапису на схему порівняння. Другий імпульс, який надходить від тригера на реверсивний вхід того ж РЛч здійснює зворотній рахунок надходячих через його імпульсів. Третій і т.д. імпульси, які надходять на тригер роблять дії таким же чином, як і перший. Другий імпульс не надходить на схему «І», а третій імпульс надходить, як і перший на ФІ 3, на схему «І», пропускає різност-не число на схему порівняння і т.д. Таким чином, в РЛч записується число імпульсів, порівняно різності подовженого та покорочено 5 го (руху ДС) півперіоду сканування. Півперіод сканування подовжується тоді, коли швидкість руху ЛА співпадає з швидкістю руху ДС, а коли не співпадає – поскорочується. Формування сигналу кутової швидкості ' відбувається таким же чином, як і для кутової швидкості ' (Фіг.1). Отримання інформації про кутові швидкості ' і ' відбувається у ЕЦОМ, а відображення - у блоках відображення інформації. Вимірювальна інформація про тангенціальну складову швидкості (кутові швидкості) ЛА від каналу кутових швидкостей використовується в БР для розпізнавання літального апарату, за яким ведеться стеження. Формування ДС лазерного випромінювання, створення РСН пов'язано із задоволенням жорстких вимог, що пред'являються до спектру випромінювання одномодового багаточастотного лазерапередавача, тобто високоточної синхронізації подовжніх мод і стабілізації частот міжмодових биттів. Випромінювання, яке знаходиться біля рівня втрат синхронізованого одномодового багаточас 52934 6 тотного спектру лазера-передавача та є невелике за потужністю - не використовується. Джерела інформації: 1. Рондин Ю. П., Коломийцев А. В. Система автоматического сопровождения объекта по направлению на многомодовых лазерах. // Информационные системы. Вып. - 1(5). - X.: НАНУ, ПАНИ, ХВУ. - 1997. - С. 35-39. 2. Деклараційний патент на винахід 63285 А, Україна, МПК G01S11/04, G01S17/42. Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу вимірювання. / Г.В. Альошин, О.В. Коломійцев, Д.П. Пашков. - №2003032666; Заяв. 27.03.2003; Опубл. 15.01.2004; Бюл. №1. - 8с. 3. Деклараційний патент України на винахід №65099А, Україна, МПК G01 S 17/42, G01 S 17/66. Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів. / О.В. Коломійцев - №2003054908; Заяв. 15.03.2004; Опубл. 15.03.2004; Бюл. №3 - 8с. 7 Комп’ютерна верстка М. Ломалова 52934 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюChannel for measurement of angular velocities of aircrafts with possibility of identification of a for lvs
Автори англійськоюKolomiitsev Oleksii Volodymyrovych, Balabukha Oleksii Serhiiovych, Vasyliev Dmytro Hennadiiovych, Vorobiov Ruslan Volodymyrovych, Voronov Dmytro Mykhailovych, Zlotnikov Andrii Lvovych, Klivets Serhii Ivanovych, Kopylov Oleksandr Oleksiiovych, Sadovyi Kostiantyn Vitaliiovych
Назва патенту російськоюКанал измерения угловых скоростей летательных аппаратов с возможностью распознания ла для лвс
Автори російськоюКоломийцев Алексей Владимирович, Балабуха Алексей Сергеевич, Васильев Дмитрий Геннадьевич, Воробьев Руслан Владимирович, Воронов Дмитрий Николаевич, Злотников Андрей Львович, Кливец Сергей Иванович, Копылов Александр Алексеевич, Садовый Константин Витальевич
МПК / Мітки
МПК: G01S 17/42, G01S 11/00
Мітки: швидкостей, розпізнання, апаратів, можливістю, літальних, канал, лвс, кутових, вимірювання
Код посилання
<a href="https://ua.patents.su/4-52934-kanal-vimiryuvannya-kutovikh-shvidkostejj-litalnikh-aparativ-z-mozhlivistyu-rozpiznannya-la-dlya-lvs.html" target="_blank" rel="follow" title="База патентів України">Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнання ла для лвс</a>
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ла
Номер патенту: 51059
Опубліковано: 25.06.2010
Автори: Болюбаш Олексій Олексійович, Воробйов Руслан Володимирович, Клівець Сергій Іванович, Рисований Олександр Миколайович, Васильєв Дмитро Геннадійович, Коломійцев Олексій Володимирович, Висоцький Олег Володимирович, Пашков Дмитро Павлович, Макаров Сергій Анатолійович, Сідченко Сергій Олександрович
МПК: G01S 17/66, G01S 17/42
Мітки: кутових, можливістю, вимірювання, канал, літальних, розпізнавання, апаратів, швидкостей
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми "і",...
Канал вимірювання кутових швидкостей літальних апаратів з можливістю формування та обробки зображення ла для лвс
Номер патенту: 51797
Опубліковано: 26.07.2010
Автори: Васильєв Дмитро Геннадійович, Клівець Сергій Іванович, Воронов Дмитро Миколайович, Рисований Олександр Миколайович, Петренко Олексій Сергійович, Коломійцев Олексій Володимирович, Балабуха Олексій Сергійович, Воробйов Руслан Володимирович, Альошин Геннадій Васильович, Герасимов Сергій Вікторович
МПК: G01S 17/42, G01S 11/00
Мітки: вимірювання, формування, можливістю, обробки, зображення, кутових, літальних, швидкостей, канал, лвс, апаратів
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з можливістю формування та обробки зображення ЛА для ЛВС, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), блок дефлекторів, передаючу оптику, приймаючу оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери, схеми "і", резонансні лічильники,...
Канал вимірювання кутових швидкостей літальних апаратів з можливістю формування та обробки зображення ла
Номер патенту: 51040
Опубліковано: 25.06.2010
Автори: Васильєв Дмитро Геннадійович, Закіров Замір Забірович, Воробйов Руслан Володимирович, Альошин Геннадій Васильович, Костенко Ігор Леонідович, Рисований Олександр Миколайович, Сідченко Сергій Олександрович, Клівець Сергій Іванович, Челпанов Артем Володимирович, Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: літальних, можливістю, формування, зображення, обробки, канал, швидкостей, кутових, вимірювання, апаратів
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з можливістю формування та обробки зображення ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми...
Канал вимірювання кутових швидкостей літальних апаратів для лвс
Номер патенту: 45542
Опубліковано: 10.11.2009
Автори: Васильєв Дмитро Геннадійович, Клівець Сергій Іванович, Коломійцев Олексій Володимирович, Хударковський Костянтин Ігорович, Катунін Альберт Миколайович, Рисований Олександр Миколайович, Альошин Геннадій Васильович, Бєлімов Володимир Васильович, Сідченко Сергій Олександрович, Кадубенко Станіслав Валентінович
МПК: G01S 11/00, G01S 17/42
Мітки: літальних, апаратів, кутових, канал, швидкостей, лвс, вимірювання
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів для ЛВС, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових бітів, формувачі імпульсів, тригери, схеми "і", резонансні лічильники, схеми порівняння, електронно-цифрові обчислювальні...
Канал вимірювання кутових швидкостей літальних апаратів з додатковим скануванням для лвс
Номер патенту: 47088
Опубліковано: 11.01.2010
Автори: Коломійцев Олексій Володимирович, Макаров Сергій Анатолійович, Висоцький Олег Володимирович, Хударковський Костянтин Ігорович, Рисований Олександр Миколайович, Васильєв Дмитро Геннадійович, Сідченко Сергій Олександрович, Гоготов Валерій Васильович, Копилов Олександр Олексійович, Бєлімов Володимир Васильович
МПК: G01S 11/00, G01S 17/42
Мітки: літальних, додатковим, скануванням, апаратів, лвс, вимірювання, кутових, швидкостей, канал
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з додатковим скануванням для ЛВС, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери, схеми "і", резонансні лічильники, схеми порівняння,...
Попередній патент: Канал автоматичного супроводження літальних апаратів за напрямком з можливістю розпізнавання ла для лвс
Наступний патент: Канал вимірювання похилої дальності до літальних апаратів з можливістю розпізнання ла для лвс
Випадковий патент: Спосіб пластики холедоха куксою міхурової протоки