Спосіб подавлення помилок багатопроменевості в приймачах супутникової навігації
Номер патенту: 53604
Опубліковано: 15.01.2003
Автори: Дубінко Татьяна Юрьєвна, Карпань Сергій Володимирович, Дубінко Юрій Сєргєєвіч
Формула / Реферат
1. Спосіб подавлення помилок багатопроменевості в приймачах супутникової навігації, який полягає в тому, що виконують операції пошуку сигналів навігаційних супутників по несучій частоті і затримці коду, супроводу знайдених сигналів слідкувальними контурами по несучій і затримці, виміру радіонавігаційних параметрів, а також амплітуди прийнятого сигналу, бітової синхронізації і виділення переданої супутником службової інформації, який відрізняється тим, що далі послідовно проводять операції згладжування амплітуди, згладжування дальності, формування варіацій амплітуди, формування варіацій дальності, формування коваріації як добутку варіацій амплітуди і дальності, первинного згладжування коваріацій, виявлення (детектування) факту впливу багатопроменевості (порівняння з порогом), ухвалення рішення (по перевищенню порога), вторинного згладжування коваріацій, обчислення оцінки помилки дальності шляхом розподілу згаданої коваріації на поточне значення варіації амплітуди і введення виправлень у кодові і фазові дальності, обчислення різниці фаз прямого і відбитого сигналів, обчислення оцінки помилки поточної фази, викликаної багатопроменевістю і уведення виправлень у виміри поточної фази, причому обчислення різниці фаз прямого і відбитого сигналів (поточний фазовий кут ![]() ) визначають за формулою:
) визначають за формулою:
![]()
де ![]() - поточний фазовий кут;
- поточний фазовий кут;
![]() - поточний момент часу;
- поточний момент часу;
![]() - момент найближчого до поточного попереднього максимуму амплітуди;
- момент найближчого до поточного попереднього максимуму амплітуди;
![]() - період коливань амплітуди, викликаних багатопроменевою інтерференцією
- період коливань амплітуди, викликаних багатопроменевою інтерференцією
(інтервал між сусідніми максимумами, що вміщає ![]() ),
),
а оцінку помилки поточної фази, викликаної багатопроменевістю обчислюють по формулі
![]()
де через ![]() позначене відношення амплітуд відбитого і прямого сигналів;
позначене відношення амплітуд відбитого і прямого сигналів;
![]() - поточна помилка фазометра;
- поточна помилка фазометра;
![]() - різниця фаз прямого і відбитого сигналів,
- різниця фаз прямого і відбитого сигналів,
як амплітуду прямого сигналу приймають її поточне згладжене значення, як амплітуду відбитого сигналу - напіврізницю максимального і мінімального значень амплітуди, найближчих до поточного моменту часу ![]() .
.
2. Спосіб за п.1, який відрізняється тим, що згладжування відліків амплітуди і коваріацій виконують будь-яким з відомих у математичній статистиці методом, наприклад за формулою:
![]()
де ![]() - обновлена оцінка величини, що згладжується;
- обновлена оцінка величини, що згладжується;
![]() - попередня оцінка;
- попередня оцінка;
![]() - елемент вибірки параметра, що згладжується;
- елемент вибірки параметра, що згладжується;
![]() - коефіцієнт згладжування.
- коефіцієнт згладжування.
3. Спосіб за пп.1, 2, який відрізняється тим, що згладжування обмірюваних значень дальностей ![]() проводять рекурентно з використанням інформації про обмірювані значення доплерівських інтегралів ДИі, наприклад за формулою:
проводять рекурентно з використанням інформації про обмірювані значення доплерівських інтегралів ДИі, наприклад за формулою:
![]()
де ![]() - обновлена оцінка згладженої дальності при надходженні чергового і-го виміру;
- обновлена оцінка згладженої дальності при надходженні чергового і-го виміру;
![]() - та ж оцінка на попередньому кроці;
- та ж оцінка на попередньому кроці;
![]() - коефіцієнт згладжування;
- коефіцієнт згладжування;
![]() - знову обмірюване значення дальності.
- знову обмірюване значення дальності.
Текст
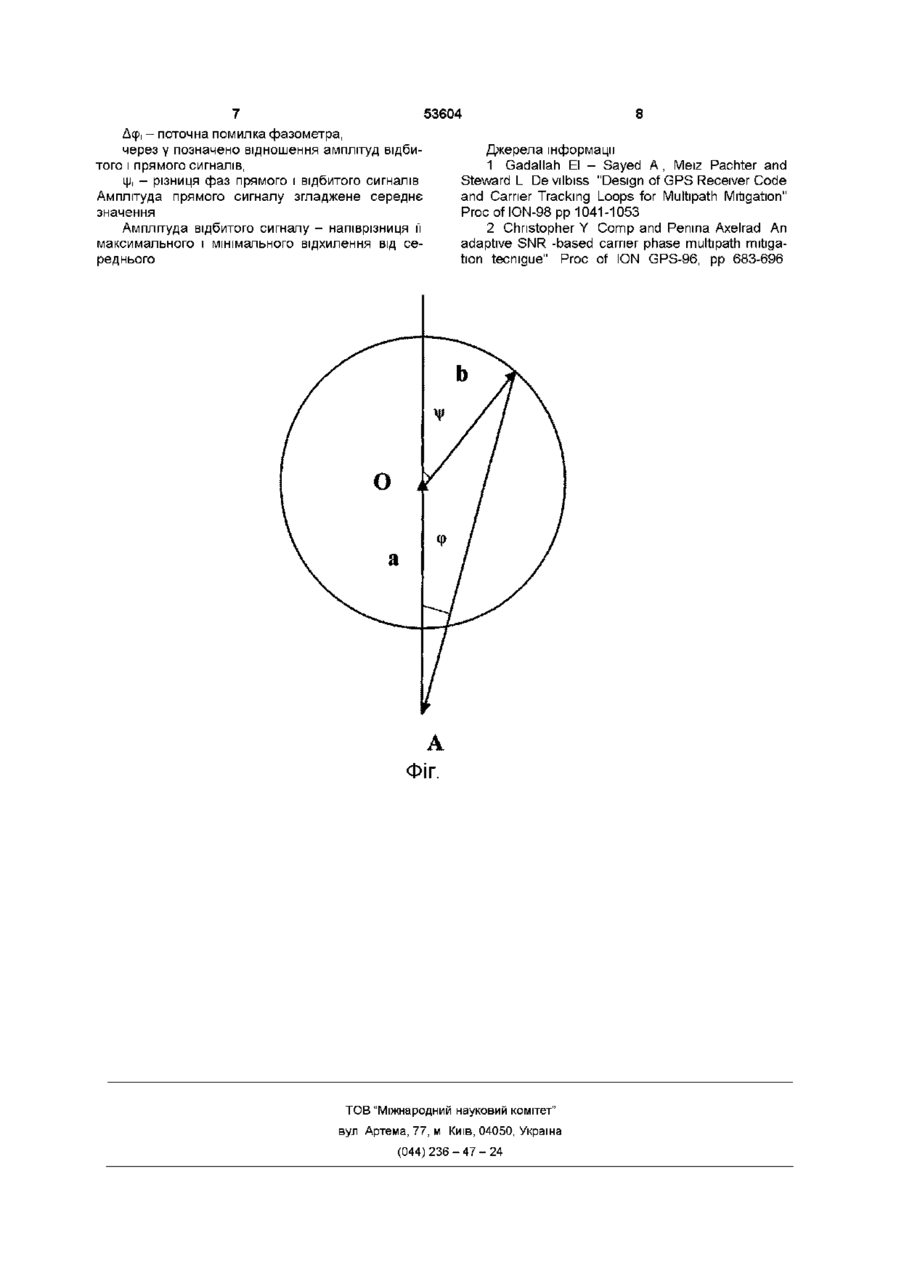
1 Спосіб подавления помилок багатопроменевості в приймачах супутникової навігації, який полягає в тому, що виконують операції пошуку сигналів навігаційних супутників по несучій частоті і затримці коду, супроводу знайдених сигналів слід кувальними контурами по несучій і затримці, виміру радіонавігаційних параметрів, а також амплітуди прийнятого сигналу, бітової синхронізації і виділення переданої супутником службової інформації, який відрізняється тим, що далі послідовно проводять операції згладжування амплітуди, згладжування дальності, формування варіацій амплітуди, формування варіацій дальності, формування коваріацм як добутку варіацій амплітуди і дальності, первинного згладжування коваріацій, виявлення (детектування) факту впливу багатопроменевості (порівняння з порогом), ухвалення рішення (по перевищенню порога), вторинного згладжування коваріацій, обчислення оцінки помилки дальності шляхом розподілу згаданої коваріацм на поточне значення варіації амплітуди і введення виправлень у кодові і фазові дальності, обчислення різниці фаз прямого і відбитого сигналів, обчислення оцінки помилки поточної фази, викликаної багатопроменевістю і уведення виправлень у виміри поточної фази, причому обчислення різниці фаз прямого і відбитого сигналів (поточний фазовий кут ють за формулою t де ц/ 1 -t - поточний фазовий кут, - поточний момент часу, ) визнача t - момент найближчого до поточного поперед нього максимуму амплітуди, Т - період коливань амплітуди, викликаних багатопроменевою інтерференцією (інтервал між сусідніми максимумами, що вміщає а оцінку помилки поточної фази, викликаної багатопроменевістю обчислюють по формулі = arccos де через у \ + Y COS Ц/ \-у2 +2у cos ц/ позначене відношення амплітуд відбитого і прямого сигналів, Д^9 ц/ - поточна помилка фазометра, - різниця фаз прямого і відбитого сигналів, як амплітуду прямого сигналу приймають її поточне згладжене значення, як амплітуду відбитого сигналу напіврізницю максимального і мінімального значень амплітуди, найближчих до поточного моменту часу t 2 Спосіб за п 1, який відрізняється тим, що згладжування ВІДЛІКІВ амплітуди і коваріацій виконують будь-яким з відомих у математичній статистиці методом, наприклад за формулою Х=(1де X - обновлена оцінка величини, що зглад жується, X X , - попередня оцінка, - елемент вибірки параметра, що зглад жується, ^ - коефіцієнт згладжування З Спосіб за пп 1, 2, який відрізняється тим, що згладжування обмірюваних значень дальностей D проводять рекурентно з використанням інфо рмації про обмірювані значення доплерівських О (О со Ю 53604 інтегралів ДМ,, наприклад за формулою D. - та ж оцінка на попередньому кроці, & - коефіцієнт згладжування, де D - обновлена оцінка згладженої дальності D - знову обмірюване значення дальності при надходженні чергового /-го виміру, Винахід відноситься до області радіотехніки, і зокрема, радіонавігації з використанням сигналів навігаційних супутникових систем GPS і ГЛОНАСС Пропонований спосіб може бути використаний для подавления помилок багатопроменевості в приймачах супутникової навігації, які одночасно приймають і паралельно обробляють сигнали супутникових навігаційних систем GPS і ГЛОНАСС Антена приймача супутникової навігації сприймає як прямий сигнал супутника, так і відбитий від навколишніх предметів і об'єктів, іншими словами, реальні супутникові приймачі працюють в умовах багатопроменевого поширення сигналів Затримка відбитого сигналу щодо прямого спотворює передній край взаємокореляційної функції (ВКФ) прийнятого й очікуваного сигналу і приводить до помилок виміру дальності (широкого положення піка ВКФ на часовій осі) Знак цієї помилки міняється в залежності від різниці фаз прямого і відбитого сигналів ( відбитий у фазі з прямими, чи в протифазі), а величина звичайно складає одиниці метрів (для сучасних приймачів з вузкостробовим корелятором і розширеною смугою частот радютракту) Іноді ця помилка може досягати 1015 метрів Помилки багатопроменевості стають незалежними в двох антенах при рознесенні їх навіть на частки довжини хвилі Ця обставина обмежує точність диференційного режиму на рівні вищевказаних величин навіть у тому випадку, якщо в опорній станції помилок багатопроменевості немає, чи вони усунуті яким-небудь ускладненням апаратури цієї станції, або алгоритмом обробки вимірів У споживача, що знаходиться в більш складних з погляду можливості віддзеркалення сигналів умовах і який використовує звичайні приймачі, ці помилки завжди присутні Таке обмеження спонукало розробників прийомної апаратури шукати прості й ефективні способи для подавления помилок багатопроменевості в самому приймачі Таких способів у даний час відомо досить багато (кожна фірма-розробник широко рекламує свої), але далеко не всі вони забезпечують субметровий рівень точності, а якщо забезпечують, то ціною істотного ускладнення і подорожания приймачів ВІДОМІ аналоги пропонованого способу, засновані на аналізі варіацій амплітуди прийнятого багатопроменевого сигналу для подавления помилок далекоміра [1], [2] Відомий спосіб подавления помилок багатопроменевості, заснований на аналізі через т зв "strength parameter X" - добавку потужності відбитого сигналу до потужності прямого [1] Однак цей спосіб дуже складний апаратно і потребує значної ресурсомісткості у програмній реалізації По-перше, він вимагає наявності банку кореляторів з різними затримками опорних сигналів (MEDLL - Multypath Estimading Delay Lock Loop - контур спостереження для оцінювання затримки багатопроменевого сигналу) По-друге, виходи цих кореляторів підсумовують з вагами, що вимагають громіздких складних обчислень (із застосуванням дворазового підсумовування) і компенсують зсуви піка ВКФ, викликані багатопроменевістю Компенсація досягається зворотним зсувом місця перетинання нуля дискримінаційною характеристикою далекоміра, що стежить Найбільш близьким аналогом (прототипом) пропонованого способу є спосіб подавления помилок багатопроменевості, у якому вихідним є відношення сигнал/шум (SNR), виражене в одиницях AM (Trimble Amplitude Units), з якого формується й обробляється амплітудне відношення сигнал/шум (SNRA) [2] SNRA, ВІДПОВІДНО до [2] проходить повний спектральний аналіз у два етапи -ініціалізація й уточнення за рахунок двохразового застосування ANF (Adaptive North Filter) і ALS (Adaptive Least Sguare), тобто адаптивного фільтра Hopca (ANF) і способу найменших квадратів (ALS) Отримані в такий спосіб оцінки амплітуд, частот і початкових фаз відбитих сигналів використовуються для обчислення фазових помилок по коду і несущої У даному способі не використовується сильна взаємна кореляція (коефіцієнт цієї кореляції близький до одиниці) МІЖ SNRA і помилками вимірів, а використовується відома функціональна залежність між параметрами відбитого сигналу і помилками дальності і фази несучої Оцінки зазначених помилок радіонавігаційних параметрів обчислюють з використанням оцінок параметрів відбитого сигналу, отриманих з аналізу амплітуд (SNRA) Цей спосіб найбільш близький до пропонованого, заснованому на вищевказаній сильній взаємній кореляції Як і в пропонованому способі, тут, крім стандартних операцій, виконуваних будь-яким навігаційним приймачем, а саме • пошук сигналів навігаційних супутників по несучій частоті і затримці коду, • супровід сигналів знайдених супутників контурами, що стежать за несучою і затримкою, • вимір (оцінка) радіонавігаційних параметрів, • бітова синхронізація і виділення переданої супутниками службової інформації, • виробляється також вимір, згладжування й аналіз амплітуди прийнятого сигналу Недоліки прототипу 53604 • затримки у фільтрах SNRA, що не дозволятром загасання а, що надалі будемо називати ають формувати виправлення до вимірів у реальБІХ фільтром) ному часі (у темпі відновлення координат), що істотно обмежує область застосувань цього способу, де ' - обновлена оцінка величини, що згла• недостатня вірогідність одержуваних резульджується, татів, оскільки для обчислення виправлень до вимірів радіонавігаційних параметрів використовуX,1 - л 1 - попередня оцінка, ється інформація тільки одного непрямого X, - елемент вибірки параметра, що згладжуджерела - варіації амплітуди (можуть вироблятися ється, помилкові виправлення до вимірів через вплив на а - коефіцієнт згладжування амплітуду інших видів перешкод), Якщо X - це коваріація, тобто добуток варіацій • складність і ресурсномісткість обчислюваль(відхилень від поточних середніх значень амплітуних операцій, що обмежують його застосування в ди 5А| і дальності 5D,), то параметр "а" бажано апаратурі масового споживача вибирати в діапазоні 0,015-0,03 В основу винаходу покладена задача усунення Таку ж процедуру виконують для обчислення недоліків прототипу, що зважується тим, що в просереднього значення амплітуди Варіації дальнопонованому способі подавления помилок багатостей обчислюють як відхилення поточних вимірів променевості, що включає операції пошуку сигнавід згладженого тренда Тренд дальності одержулів навігаційних супутників по несучій частоті і ють згладжуванням кодових дальностей високотозатримці коду, супроводу знайдених сигналів кончними фазовими вимірами (доплерівськими інтегтурами, що стежать, по несучій і затримці, виміру ралами) по формулі радіонавігаційних параметрів, а також амплітуди прийнятих сигналів, бітової синхронізації і виділення переданої супутником службової інформації формуються варіації (відхилення від згладженого тренда) вимірів дальності й амплітуди, обчислюють другий змішаний момент зв'язку дальності й амплітуди Qx коваріацію) Технічний результат у пропонованому винаході досягається тим, що в способі подавления помилок багатопроменевості в приймачах супутникової навігації додатково проводять операції згладжування амплітуди, згладжування дальності, формування варіацій амплітуди, формування варіацій дальності, формування коваріацм як добутку варіацій амплітуди і дальності, первинного згладжування коваріацій, виявлення (детектування) факту впливу багатопроменевості (порівняння з порогом), ухвалення рішення (по перевищенню порога), вторинного згладжування коваріацій, обчислення оцінки помилки дальності шляхом розподілу згаданої коваріацм на поточне значення варіації амплітуди і введення виправлень у кодові і фазові дальності, обчислення різниці фаз прямого і відбитого сигналів, обчислення оцінки помилки поточної фази, викликаною багатопроменевістю і введення виправлень у виміри поточної фази Сукупність перерахованих ознак дозволяє підвищити вірогідність одержуваних результатів, спростити обчислювальні операцій, що обмежують застосування алгоритмів в апаратурі масового споживача У способі додатково формують варіації (відхилення від згладженого тренда) вимірів дальності й амплітуди, обчислюють другий змішаний момент зв'язку дальності й амплітуди (їх коваріацію) Коваріацію додатково згладжують на інтервалі 30-60сек (періоду багатопроменевої інтерференції) Поточну оцінку багатопроменевої помилки в дальності обчислюють розподілом поточної оцінки коваріацм на поточне відхилення амплітуди від м середнього значення Коваріацію згладжують за допомогою рекурентної лінійної процедури 1 порядку (фільтр із нескінченною імпульсною характеристикою і параме п 1 і=і 1 D, та ' - обмірюване і згладжене значення кодової дальності ВІДПОВІДНО, ДЦ - доплеровський інтеграл (набіг фази несучої) на інтервалі від tk •] до tk Отримані варіації ампулідуди і дальності додатково згладжують по рекурентній формулі (1) з коефіцієнтом (у діапазоні 0,1-0,3) Для підвищення надійності і вірогідності подавления помилок багатопроменевості вводять попередню операцію їхнього виявлення Детектором багатопроменевості є результат порівняння згаданої коваріацм, згладженої з а=0,1 із заздалегідь установленим порогом С Величину порогу визначають через припустимий залишковий рівень помилок багатопроменевості ВІДПОВІДНО ДО теорії перевірки статистичних гіпотез за критерієм максимальної правдоподібності й уточнюють експериментально Співвідношення між поточною фазою фі вектора відбитого сигналу tt-tm (3) t, - поточний момент часу, t m - момент найближчого попереднього максимуму амплітуди, фі - різниця фаз прямого і відбитого сигналів, Т - період коливань амплітуди, викликаних багатопроменевою інтерференцією і поточною помилкою фазометра Дер, представлено векторною діаграмою На фіг показана векторна діаграма, де а - вектор прямого сигналу, b - вектор відбитого сигналу З відомих формул зв'язку елементів косокутного трикутника ОСВ одержуємо (4) 53604 Дфі - поточна помилка фазометра, через у позначено відношення амплітуд відбитого і прямого сигналів, фі - різниця фаз прямого і відбитого сигналів Амплітуда прямого сигналу згладжене середнє значення Амплітуда відбитого сигналу - напіврізниця її максимального і мінімального відхилення від середнього 8 Джерела інформації 1 Gadallah El - Sayed A , Meiz Pachter and Steward L Devilbiss "Design of GPS Receiver Code and Carrier Tracking Loops for Multipath Mitigation" Proc of ION-98 pp 1041-1053 2 Christopher Y Comp and Penma Axelrad An adaptive SNR -based carrier phase multipath mitigation tecmgue" Proc of ION GPS-96, pp 683-696 A Фіг. TOB "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for eliminating errors caused by the effect of several signal beams when receiving signals in a satellite navigation system
Назва патенту російськоюСпособ исключения погрешностей, вызванных наличием нескольких лучей при приеме сигналов в системе спутниковой навигации
МПК / Мітки
Мітки: приймачах, навігації, помилок, спосіб, подавлення, багатопроменевості, супутникової
Код посилання
<a href="https://ua.patents.su/4-53604-sposib-podavlennya-pomilok-bagatopromenevosti-v-prijjmachakh-suputnikovo-navigaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб подавлення помилок багатопроменевості в приймачах супутникової навігації</a>
Спосіб навігації
Номер патенту: 50672
Опубліковано: 15.10.2002
Автори: Обод Іван Іванович, Силич Валерій Прокопович, Полюга Валентин Петрович
МПК: G01C 21/00, G01S 3/00
Формула / Реферат:
Спосіб навігації, який полягає в тому, що бортовим запитувачем випромінюють кодовий сигнал запиту дальності на несучій частоті f1, який приймають наземним відповідачем, декодують та випромінюють кодовий сигнал відповіді дальності на несучій частоті f'2, який приймають та декодують бортовим запитувачем, і по часу запізнення між кодовими сигналами запиту та відповіді дальності вимірюють дальність, який відрізняється тим, що на наземному...
Пристрій для паралельного декодування пакетів помилок в циклічних (n,к)-кодах

Номер патенту: 34753
Опубліковано: 15.03.2001
Автор: Семеренко Василь Петрович
МПК: G06F 11/08
Мітки: декодування, паралельного, циклічних, пакетів, помилок, пристрій, n,к)-кодах
Формула / Реферат:
1. Пристрій для паралельного декодування пакетів помилок в циклічних (n, k)-кодах, який містить перший перетворювач кодів і блок синхронізації, вихід якого з'єднаний з входом синхронізації першого перетворювача кодів, інформаційний вхід і вхід початкового установлення якого під'єднані відповідно до інформаційного входу пристрою і до входу початкового установлення пристрою, який відрізняється тим, що в нього введені додатково перетворювачів...
Пристрій для локалізації пакетів помилок в (n,к) – кодах боуза-чоудхурі-хоквінгема
Номер патенту: 46078
Опубліковано: 15.05.2002
Автор: Семеренко Василь Петрович
МПК: H03M 13/15, G06F 11/08, H03M 13/17
Мітки: помилок, пакетів, пристрій, кодах, боуза-чоудхурі-хоквінгема, nk-2, локалізації
Формула / Реферат:
1. Пристрій для локалізації пакетів помилок в (n, k)-кодах Боуза-Чоудхурі-Хоквінгема, який містить перетворювач кодів і блок синхронізації, вихід якого з'єднаний з входом синхронізації перетворювача кодів, перший інформаційний вхід, вхід керування і вхід початкового установлення якого приєднані відповідно до інформаційного входу пристрою, до входу вибору режиму роботи і до входу початкового установлення пристрою, який відрізняється тим, що в...
Пристрій для зниження шумів у супергетеродинних приймачах за відсутності корисного сигналу
Номер патенту: 39056
Опубліковано: 15.05.2001
Автори: Боровик Олег Васильович, Рачок Роман Васильович
МПК: H04B 15/02
Мітки: сигналу, приймачах, корисного, супергетеродинних, шумів, пристрій, зниження, відсутності
Формула / Реферат:
Пристрій для зниження рівня шумів у супергетеродинних приймачах за відсутності корисного сигналу, що містить підсилювач проміжної частоти з коливальним контуром із стабілітроном, який відрізняється тим, що послідовний коливальний контур із стабілітроном включений між виходом емітерного повторювача підсилювача проміжної частоти і виходом пристрою.
Пристрій для зниження рівня шумів у супергетеродинних приймачах за відсутності корисного сигналу
Номер патенту: 37824
Опубліковано: 15.05.2001
Автори: Рачок Роман Васильович, Капітанець Олександр Миколайович, Боровик Олег Васильович
МПК: H04B 15/02
Мітки: зниження, корисного, супергетеродинних, шумів, сигналу, пристрій, рівня, приймачах, відсутності
Формула / Реферат:
Пристрій для зниження рівня шумів у супергетеродинних приймачах за відсутності корисного сигналу, що містить у підсилювачі проміжної частоти коливальний контур, який відрізняється тим, що у коливальному контурі послідовно до конденсатора підключено стабілітрон.
Попередній патент: Спосіб маркетингових та соціологічних досліджень (спосіб touchpoll)
Наступний патент: Система видалення стоків
Випадковий патент: Етиловий естер 9-метил-3-оксо-2,3-дигідротієно[3,2-e][1,2,4]триазоло[4,3-c]піримідин-8-карбонової кислоти, який проявляє анальгетичну та протизапальну активність