Спосіб навігації
Номер патенту: 50672
Опубліковано: 15.10.2002
Автори: Силич Валерій Прокопович, Обод Іван Іванович, Полюга Валентин Петрович
Формула / Реферат
Спосіб навігації, який полягає в тому, що бортовим запитувачем випромінюють кодовий сигнал запиту дальності на несучій частоті f1, який приймають наземним відповідачем, декодують та випромінюють кодовий сигнал відповіді дальності на несучій частоті f'2, який приймають та декодують бортовим запитувачем, і по часу запізнення між кодовими сигналами запиту та відповіді дальності вимірюють дальність, який відрізняється тим, що на наземному відповідачі додатково оцінюють азимут прийнятого кодового сигналу запиту дальності, перетворюють код азимуту у проміжок часу, по закінченні якого випромінюють кодовий сигнал азимуту, який приймають та декодують бортовим запитувачем, і по часу запізнення між прийнятими кодовими сигналами дальності та азимуту обчислюють азимут.
Текст
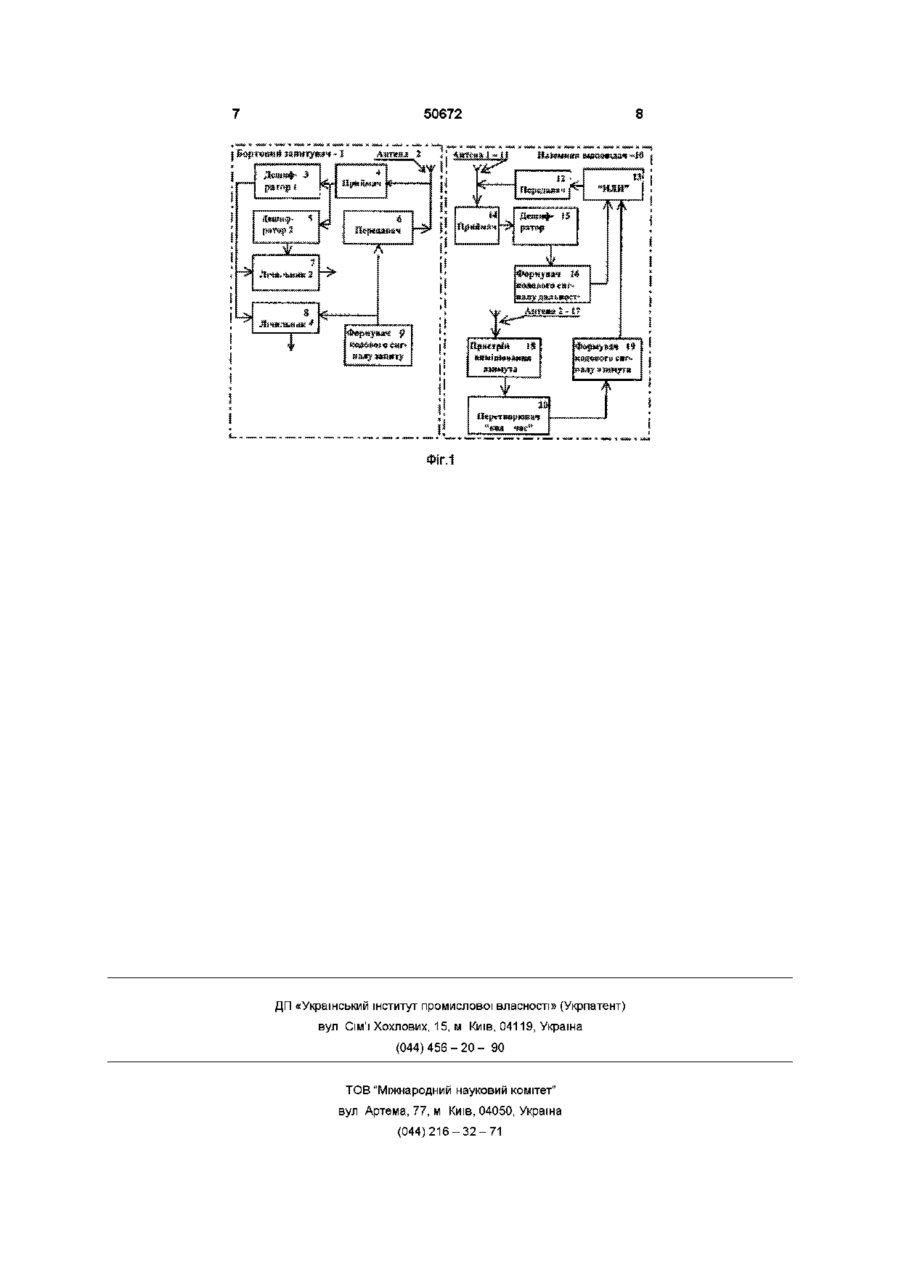
Спосіб навігації, який полягає в тому, що бортовим запитувачем випромінюють кодовий сигнал запиту дальності на несучій частоті fi, який приймають наземним відповідачем, декодують та ви промінюють кодовий сигнал ВІДПОВІДІ дальності на несучій частоті f2, який приймають та декодують бортовим запитувачем, і по часу запізнення між кодовими сигналами запиту та ВІДПОВІДІ дальності вимірюють дальність, який відрізняється тим, що на наземному відповідачі додатково оцінюють азимут прийнятого кодового сигналу запиту дальності, перетворюють код азимуту у проміжок часу, по закінченні якого випромінюють кодовий сигнал азимуту, який приймають та декодують бортовим запитувачем, і по часу запізнення між прийнятими кодовими сигналами дальності та азимуту обчислюють азимут Винахід відноситься до галузі систем радіонавігації і призначений, зокрема, для вимірювання місцеположення повітряних кораблів в системах ближньої навігації Відомий спосіб навігації полягає в тому, що бортовим запитувачем приймають кодові та безперервні сигнали азимуту, на основі яких вимірюють азимут, а також випромінюють сигнал запиту дальності, який приймають та декодують наземним відповідачем, затримують на певний час і випромінюють кодовий сигнал ВІДПОВІДІ, ЯКИЙ приймають та декодують бортовим запитувачем і по часу запізнення між випромшеним та прийнятим кодовим сигналами вимірюють дальність [1] Спільними ознаками аналогу і способу, що заявляється, є прийоми та операції бортовим запитувачем випромінюють сигнал запиту дальності, який приймають та декодують наземним відповідачем і випромінюють кодовий сигнал ВІДПОВІДІ, який приймають та декодують бортовим запитувачем і по часу запізнення між випромшеним та прийнятим кодовим сигналами вимірюють дальність Однак практична реалізація відомого способу заснована на роздільному вимірюванні азимуту і дальності, для реалізації якого потрібно три передавачі на наземному відповідачі Для вимірювання азимуту бортовим запитувачем наземний відповідач (радіомаяк) випромінює безперервний сигнал, модульований вузьконаправленною антенною, яка стабільно обертається, а також кодові сигнали за допомогою ненаправленої антени Для вимірювання дальності бортовим запитувачем випромінюють код запиту дальності Цей код приймають наземним відповідачем, декодують і за результатом декодування випромінюють кодовий сигнал ВІДПОВІДІ дальності Кодовий сигнал наземного відповідача приймають та декодують бортовим запитувачем По часу запізнення між випромшеним та прийнятим кодовим сигналами на бортовому запитувачі вимірюють дальність Таким чином, для реалізації відомого способу навігації потрібно три передавачі, що характеризує складну технічну реалізацію відомого способу Недоліком відомого способу є складна технічна реалізація Найбільш близьким технічним рішенням, обраним в якості прототипу, є спосіб навігації, який полягає в тому, що наземним відповідачем (радіомаяком) випромінюють кодові та безперервні сигнали азимуту, які приймають бортовим запитувачем і на основі яких вимірюють азимут, а також випромінюють сигнал запиту дальності на несівній частоті fi, який приймають та декодують наземним відповідачем і випромінюють кодовий сигнал ВІДПОВІДІ дальності на несівній частоті f2, який приймають та декодують бортовим запитувачем і по часу запізнення між випромшеним та прийнятим кодовими сигналами вимірюють дальність [2] (О о ю Спільними ознаками прототипу та способу, що заявляється, є прийоми та операції бортовим запитувачем випромінюють сигнал запиту дальності, який приймають та декодують наземним відповідачем і випромінюють кодовий сигнал ВІДПОВІДІ дальності, який приймають та декодують бортовим запитувачем і по часу запізнення між випромшеним та прийнятим кодовим сигналами дальності вимірюють дальність Відомий спосіб вимірювання дальності побудований по принципу відкритої системи масового обслуговування і його практична реалізація заснована на тому, що за допомогою наземного відповідача (радіомаяка) випромінюють кодові та безперервні сигнали азимуту, які приймають бортовим запитувачем і на основі яких вимірюють азимут, а також випромінюють за допомогою бортового запитувача кодовий сигнал запиту дальності Цей кодовий сигнал запиту дальності приймають наземним відповідачем, декодують та за результатом декодування випромінюють певний кодовий сигнал ВІДПОВІДІ Кодовий сигнал наземного відповідача приймають та декодують на бортовому запитувачі По часу запізнення між кодовими сигналами запиту та ВІДПОВІДІ дальності вимірюють дальність Таким чином, для технічної реалізації відомого способу потрібно три передавачі на наземному відповідачі (радіомаяку), що характеризує відомий спосіб як складний для технічної реалізації Крім того, вимірювання і азимуту, і дальності на повітряних кораблях при практичному використанні відомого способу значно збільшує технічну складність вимірювача азимуту повітряних кораблів, а наявність віддзеркалення сигналів (особливо безперервного сигналу азимуту) значно знижує точність визначення координат, особливо азимуту Недоліком способу - прототипу є низька точність визначення координат В основу винаходу поставлено завдання створити спосіб навігації, в якому введенням нових операцій оцінюванні азимуту прийнятого кодового сигналу запиту дальності на наземному відповідачі (радіомаяку), перетворювані коду азимуту у проміжок часу, та випромшенні кодового сигналу азимуту з'явилася б можливість вимірювання азимуту на наземному відповідачі та передачі його на борт повітряного корабля і за рахунок цього підвищувалася б точність вимірювання координат Поставлене завдання вирішується тим, що в спосіб навігації, який полягає втому, що бортовим запитувачем випромінюють кодовий сигнал запиту дальності на несівній частоті f-i, який приймають наземним відповідачем, декодують та випромінюють кодовий сигнал ВІДПОВІДІ дальності на несівній частоті Т2, який приймають та декодують бортовим запитувачем і по часу запізнення між кодовими сигналами запиту та ВІДПОВІДІ дальності вимірюють дальність, також додатково на наземному відповідачі оцінюють азимут прийнятого кодового сигналу запиту дальності, перетворюють код азимуту у проміжок часу, по закінченню якого випромінюють кодовий сигнал азимуту, який приймають та декодують бортовим запитувачем і по часу запізнення між прийнятими кодовими сигналами дальності та азимуту обчислюють азимут Суттєвість 50672 запропонованого способу полягає в наступному Бортовим запитувачем у певний час випромінюють кодові сигнали запиту дальності, які приймають та декодують наземним відповідачем, формують та випромінюють кодовий сигнал ВІДПОВІДІ дальності Крім того, на наземному відповідачі оцінюють азимут прийнятих імпульсів кодового сигналу запиту дальності і за результатом оцінки код азимуту перетворюють у проміжок часу, по закінченню якого випромінюють кодовий сигнал азимуту Випромшені кодові сигнали дальності та азимуту приймають бортовим запитувачем, декодують і по часу запізнення між кодовим сигналами запиту та ВІДПОВІДІ дальності вимірюють дальність, а по часу запізнення між кодовим сигналом ВІДПОВІДІ дальності та азимута обчислюють азимут Таким чином, у запропонованому способі, завдяки новим операціям, вдається перенести вимірювання азимуту повітряного корабля відносно наземного відповідача (радіомаяка) з повітряного корабля на радіомаяк Вимірювання азимуту на наземному відповідачі має значну перевагу, оскільки дозволяє реалізувати більш ефективні алгоритми обробки сигналів, а також виключити вплив віддзеркалених сигналів на точність вимірювання азимуту Цим вдається підвищити точність вимірювання азимуту повітряного корабля, що приводить до підвищення точності вимірювання координат запропонованого способу Спосіб, що пропонується, може бути реалізований, наприклад, за допомогою системи навігації, структурна схема якої наведена на кресленні Система навігації містить бортовий запитувач 1, який містить антену 2, перший дешифратор 3, приймач 4, передавач 6, перший лічильник 8, формувач кодового сигналу запиту 9, другій дешифратор 5 та другій лічильник 7, наземний відповідач 10, який містить першу антену 11, передавач 12, елемент "ИЛИ" 13, формувач кодового сигналу дальності 16, приймач 14, дешифратор 15, другу антену 17, пристрій вимірювання азимуту 18, формувач кодового сигналу азимуту 19 та перетворювач "кодчас" 20 При цьому антена 2 бортового запитувача 1 з'єднана з виходом передавача 6 і з входом приймача 4, вихід якого з'єднаний з входом першого дешифратора 3 та з входом другого дешифратора 5, вихід якого з'єднаний з входом зупинки другого лічильника 7, вихід якого являється виходом азимуту системи навігації, а вхід обнуління - з виходом першого дешифратора 3 і з входом зупинки першого лічильника 8, вихід якого являється виходом дальності системи навігації, а вхід обнуління з виходом формувача кодового сигналу запиту 9 і з входом передавача 6, а перша антена 11 наземного відповідача 10 з'єднана з входом приймача 14 та з виходом передавача 12, вхід якого з'єднаний з виходом елемента "ИЛИ" 13, другий вхід якого з'єднаний з виходом формувача кодового сигналу дальності 16, вхід якого з'єднаний з виходом дешифратора 15, вхід якого з'єднаний з виходом приймача 14, а перший вхід елемента "ИЛИ" 13 з'єднаний з виходом формувача кодового сигналу азимута 19, вхід якого з'єднаний з виходом перетворювача "код-час" 20, вхід якого з'єднаний з виходом пристрою вимірювання азимуту 18, вхід 50672 якого з'єднаний з виходом другої антени 17 Спосіб, що пропонується, реалізують наступним чином На виході формувача кодового сигналу запиту 9 бортового запитувача 1 формують кодовий сигнал запиту дальності, який запускає перший лічильник 8 і за допомогою передавача 6 і антени 2 випромінюють у простір Цей кодовий сигнал запиту дальності приймають першою антеною 11 наземного відповідача 10 У подальшому цей сигнал обробляють приймачем 14, з виходу якого прийнятий сигнал поступає на дешифратор 15, за допомогою якого декодують прийнятий сигнал і подають на формувач кодового сигналу дальності 16, за допомогою якого формують кодовий сигнал ВІДПОВІДІ дальності, який у подальшому проходить через елемент "ИЛИ" 13 і за допомогою передавача 12 і антени 11 випромінюють у простір Крім цього кодовий сигнал запиту дальності приймають другою антеною 17 і за допомогою пристрою вимірювання азимуту 18 вимірюють азимут прийнятого кодового сигналу запиту дальності Код азимута прийнятого сигналу за допомогою перетворювача "код-час" 20 перетворюють у проміжок часу, по закінченню якого за допомогою формувача кодового сигналу азимуту 19 формують кодовий сигнал, який проходить через елемент "ИЛИ" 13 и за допомогою передавача 12 и антени 11 випромінюють у простір Кодовий сигнал дальності приймають антеною 2, обробляють приймачем 4 бортового запитувача 1 та декодують першим дешифратором 3 Імпульсом з виходу першого дешифратора 3 зупиняють лічення першого лічильника 8, на виході якого формується код дальності між наземним відповідачем (радіомаяком) і повітряним кораблем, а також запускають другий лічильник 7 Кодовий сигнал азимута приймають антенною 2, обробляють приймачем 4 і декодують за допомогою другого дешифратора 5 Імпульсом с виходу другого дешифратора 5 зупиняють другий лічильник 7, на виході якого формується код азимуту повітряного корабля Таким чином, за допомогою першого лічильника 8 вимірюють дальність між бортовим запитувачем 1 і наземним відповідачем 10, а за допомогою другого лічильника 7 обчислюють азимут повітряного корабля відносно наземного відповідача (радіомаяка), який виміряється на радіомаяку Кодові сигнали азимуту та дальності являються ортогональними Технічна реалізація означених на кресленні блоків може бути самою різною і не викликає труднощів для розробників радіоелектронної апаратури Основні блоки такі ж, як і в існуючих систем ближньої навігації [1] На кресленні не показані антенні перемикачі Кожний дешифратор включає до себе крім себе і лічильник (на кресленні не показаний) Формувачі кодових сигналів запиту та ВІДПОВІДІ 9, 16 та 19 можуть бути реалізовані на пристрої затримки та елементі "ИЛИ" Кожний лічильник (7 та 8) має у своєму складі генератор тактових імпульсів (на креслені не показані), підключений до лічильного входу лічильника Період слідування імпульсів генераторів визначає дискретність вимірювання дальності та дискретність обчислення азимуту Пристрій вимірювання азимуту 18 може бути реалізований на базі автоматичного радіопеленгатора [3, 4] На креслені наведена одна із можливих технічних реалізацій запропонованого способу Слід зауважити, що запропонований спосіб можливо виконати за різними технічними схемами На наземному відповідачі можливо використовувати два передавачі Один - для випромшення кодових сигналів дальності, а другій - для випромшення кодового сигналу азимута, як це зроблено у діючих радіотехнічних системах близької навігації Спосіб, що пропонується, у порівнянні з прототипом має наступну технічну перевагу завдяки введенню нових операцій, вдається перенести вимірювання азимуту повітряного корабля з борту повітряного корабля, як здійснюють у прототипі, на радіомаяк, що дозволило значно послабити вплив віддзеркалених сигналів на точність вимірювання азимуту, що привело до підвищення точності вимірювання координат повітряних кораблів запропонованого способу Джерела інформації 1 Белавин О В Основы радионавигации М Советское радио, 1967, С 211-212 2 Сосновский А А , Хаймович И А Авиационная радионавигация Справочник - М Транспорт, 1980 С 90-91 (прототип) 3 Чердынцев В А Радиотехнические системы - Минск "Вышэйшая школа" 1998, рис 219, 2 20, с 57-59 4 Автоматизированные системы управления воздушным /Под ред В И Савицького/ - М Транспорт, 1986 С 85-90 50672 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of navigation
Автори англійськоюObod Ivan Ivanovych
Назва патенту російськоюСпособ навигации
Автори російськоюОбод Иван Иванович
МПК / Мітки
МПК: G01S 3/00, G01C 21/00
Код посилання
<a href="https://ua.patents.su/4-50672-sposib-navigaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб навігації</a>
Спосіб вимірювання дальності
Номер патенту: 45900
Опубліковано: 15.04.2002
Автори: Полюга Валентин Петрович, Силич Валерій Прокопович, Обод Іван Іванович
МПК: G01S 13/08
Мітки: спосіб, дальності, вимірювання
Формула / Реферат:
Спосіб вимірювання дальності, який полягає в тому, що запитником випромінюють кодовий сигнал запиту дальності на несівній частоті f1, який приймають відповідачем, випромінюють кодовий сигнал відповіді дальності на несівній частоті f2, який приймають та декодують запитником і за часом запізнювання між випромінюваним та прийнятим кодовим сигналами дальності вимірюють дальність, який відрізняється тим, що оцінюють амплітуду кожного імпульсу коду...
Спосіб вимірювання дальності
Номер патенту: 40335
Опубліковано: 16.07.2001
Автори: Обод Іван Іванович, Вінник Анатолій Тихонович, Полюга Валентин Петрович
МПК: G01C 21/00
Мітки: дальності, спосіб, вимірювання
Формула / Реферат:
Спосіб вимірювання дальності, який полягає в тому, що запитником випромінюють кодовий сигнал запиту дальності на несучій частоті f1, який приймають відповідачем, декодують, випромінюють кодовий сигнал відповіді дальності на несучій частоті f2, який приймають та декодують запитником, і по часу запізнювання між випромінюваним та прийнятим кодовим сигналами дальності вимірюють дальність, який відрізняється тим, що із прийнятих сигналів...
Спосіб вимірювання дальності
Номер патенту: 45646
Опубліковано: 15.04.2002
Автори: Полюга Валентин Петрович, Силич Валерій Прокопович, Обод Іван Іванович
МПК: G01C 21/00
Мітки: дальності, спосіб, вимірювання
Формула / Реферат:
Спосіб вимірювання дальності, який полягає в тому, що запитником випромінюють кодовий сигнал запиту дальності на несівній частоті f1, який приймають відповідачем, декодують, випромінюють кодовий сигнал відповіді на несівній частоті f2, який приймають та декодують запитником і по часу запізнювання між випроміненим та прийнятим кодовим сигналами вимірюють дальність, який відрізняється тим, що кожний кодовий сигнал запиту дальності міжперіодно...
Спосіб навігації з використанням електронних маяків
Номер патенту: 47667
Опубліковано: 15.07.2002
Автори: Баришев Ігор Володимирович, Мазуренко Олександр Володимирович, Висоцький Олег Володимирович
МПК: B63B 51/00
Мітки: маяків, спосіб, використанням, електронних, навігації
Формула / Реферат:
Спосіб навігації з використанням електронних маяків, при якому навігаційний шлях задають маяками, точки місцезнаходження яких визначають попередньо, який відрізняється тим, що вимірюють просторові параметри цих точок при еталонному проходженні траси, перетворюють їх для отримання поверхонь положення з вертикальною твірною, перетином двох поверхонь положення з вертикальною твірною задають точку місцезнаходження для кожного електронного маяка...
Спосіб вимірювання малих висот польоту над землею та пристрій для його реалізації
Номер патенту: 48476
Опубліковано: 15.08.2002
Автори: Порицький Сергій Леонідович, Бахвалов Валентин Борисович
МПК: G01S 13/24, G01S 13/00
Мітки: землею, польоту, вимірювання, реалізації, малих, спосіб, висот, пристрій
Формула / Реферат:
1. Спосіб вимірювання малих висот польоту над землею, згідно з яким випромінюють з борту вниз неперервний сигнал зондування за допомогою бортової передавальної антени, приймають відбитий від землі сигнал бортовою приймальною антеною і фазовим вимірювачем вимірюють зсув фаз, який відрізняється тім, що випромінюють неперервний синусоїдальний сигнал постійної амплітуди на частоті короткохвильового або середньохвильового діапазону, приймають...
Попередній патент: Летючі барабанні ножиці
Наступний патент: Прилад для реалізації способу визначення вартості електроенергії, що оплачується за диференціальним тарифом та спосіб, що забезпечує функціонування приладу
Випадковий патент: Спосіб хірургічного лікування прикритої перфорації стенозуючої дуоденальної виразки в комбінації з парафатеральним дивертикулом дванадцятипалої кишки