Магнітоелектричний вантажозахоплювальний пристрій
Номер патенту: 5705
Опубліковано: 15.03.2005
Автори: Рибка Яків Володимирович, Лазарев Георгій Венедиктович, Клименко Віктор Микитович

Формула / Реферат
Магнітоелектричний вантажозахоплювальний пристрій, який має рухому частину і виконану складовою відносно нерухому частину, принаймні один постійний магніт, зовнішні робочі поверхні для утримування вантажу, при цьому нерухома частина включає просторово відділені одна від одної складові частини, а на рухомій частині розміщено принаймні одну пару полюсів, який відрізняється тим, що нерухома частина виконана у вигляді статора, на внутрішніх поверхнях якого виконані принаймні два пази, у яких укладена обмотка керування, наприклад, з двома послідовно або паралельно з'єднаними секціями, а усередині зазначеного статора встановлена з можливістю повороту на кут, що дорівнює половині кута полюсного ділення, рухома частина, що має вигляд індуктора, в якому розміщений принаймні один постійний магніт і який центрований за допомогою підшипникових опор у статорі з мінімальним повітряним проміжком, зовнішні робочі поверхні розміщені на статорі, вісь, яка проходить через центри пазів і центр індуктора, має однакові кутові нахили по відношенню до двох крайніх положень останнього, при цьому пази статора з обмоткою керування при знаходженні індуктора у зоні між зазначеними крайніми положеннями постійно знаходяться під дією магнітних полюсів відповідної полярності.
Текст
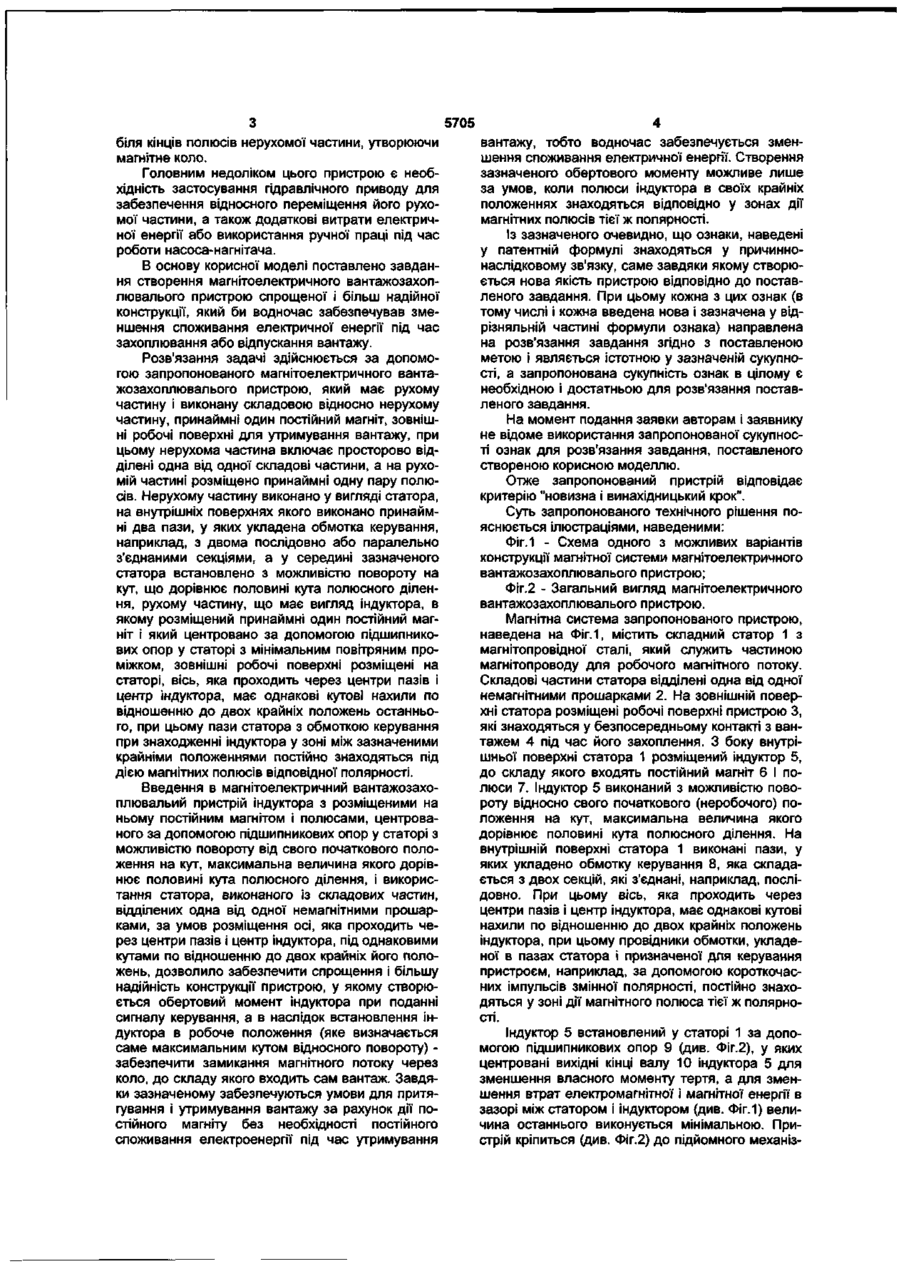
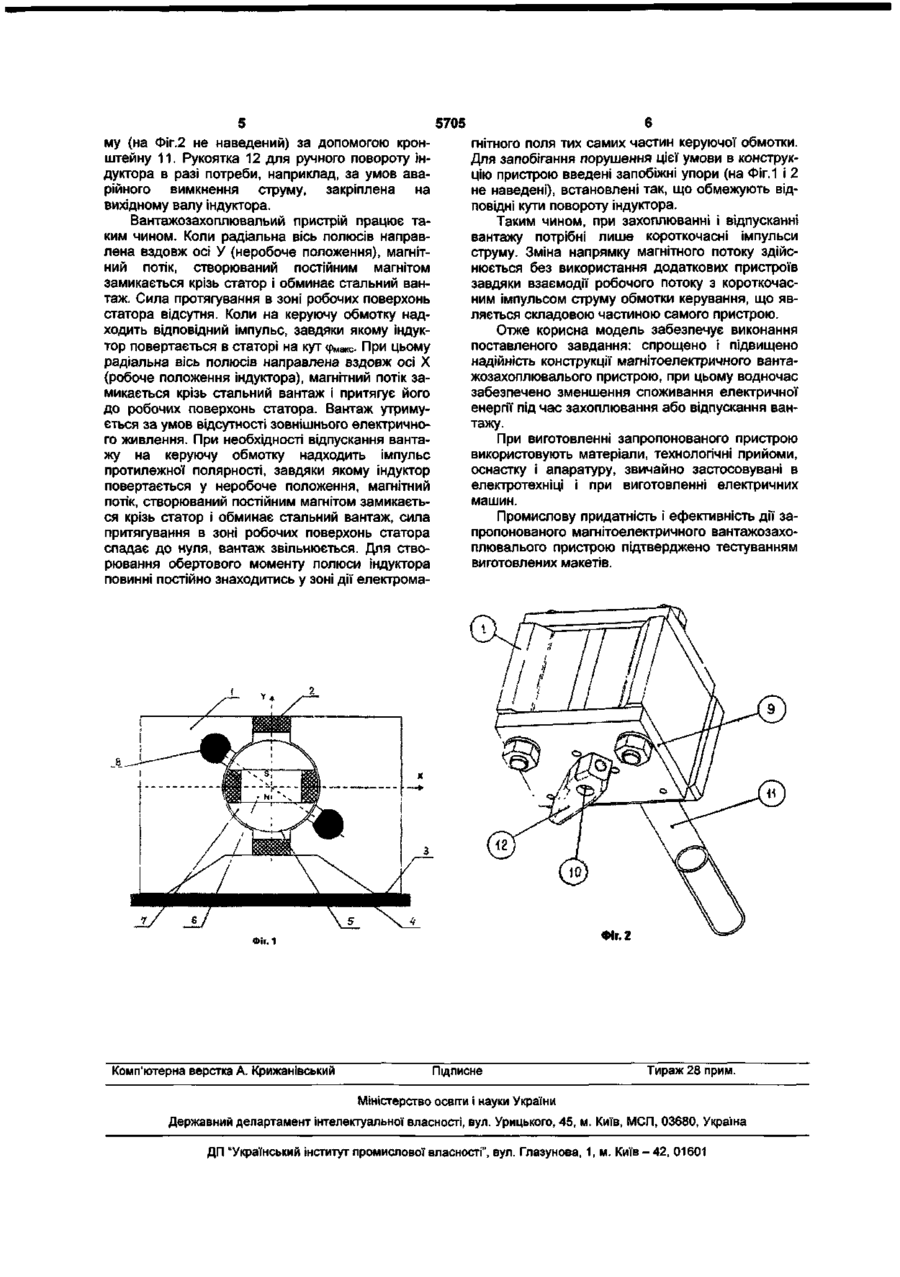
Магнітоелектричний вантажозахоплювальний пристрій, який має рухому частину і виконану складовою відносно нерухому частину, принаймні один постійний магніт, зовнішні робочі поверхні для утримування вантажу, при цьому нерухома частина включає просторово відділені одна від одної складові частини, а на рухомій частині розміщено принаймні одну пару полюсів, який відрізняється тим, що нерухома частина виконана у вигляді статора, на внутрішніх поверхнях якого виконані принаймні два пази, у яких укладена обмотка керування, наприклад, з двома послідовно або паралельно з'єднаними секціями, а усередині зазначеного статора встановлена з можливістю повороту на кут, що дорівнює половині кута полюсного ділення, рухома частина, що має вигляд індуктора, в якому розміщений принаймні один постійний магніт і який центрований за допомогою підшипникових опор у статорі з мінімальним повітряним проміжком, зовнішні робочі поверхні розміщені на статорі, вісь, яка проходить через центри пазів і центр індуктора, має однакові кутові нахили по відношенню до двох крайніх положень останнього, при цьому пази статора з обмоткою керування при знаходженні індуктора у зоні між зазначеними крайніми положеннями постійно знаходяться під дією магнітних полюсів відповідної полярності. Корисна модель належить до галузі електромеханіки, зокрема до пристроїв, призначених для захоплювання і утримування стальних предметів за допомогою електромагнітних полів. Перший відомий вантажозахоплювальий пристрій, наведений у [патенті Японії №6104548 В4, МПК 5 В66С1/08, заявка. №118231, дата подання 11.05.89]. До складу цього пристрою входить корпус, на якому з боку, протилежному робочій поверхні, розміщено обмотку живлення з виведеними провідниками для подавання електричного струму. Але на відміну від запропонованого пристрою зазначена обмотка являється обмоткою електромагніта і має відповідне осердя. За умов наявності електричного струму в обмотці електромагніта створюється електромагнітна тягова сила, яка притягує вантаж, а при вимиканні струму - ця сила спадає до нуля, і вантаж звільнюється. До головних недоліків цього пристрою належать: велике енергоспоживання, пов'язане з тим, що електрична енергія споживається протягом усього часу утримування вантажу, і небезпечність використання у зв'язку з можливістю несанкціоно ваного (аварійного) вимикання електричного струму і непередбаченого звільнення вантажу. Друге відоме технічне рішення - магнітний піднімальний пристрій, наведене у [патенті Великої Британії №2292838 А1, МПК В66С1/04, H01F7/02, H01F7/04, заявка №94947648, дата подання 02.09.94]. За сукупністю ознак це технічне рішення прийняте авторами як прототип. Пристрій-прототип має відносно нерухому і рухому частини, велику кількість розділених між собою постійних магнітів і велику кількість полюсів з магнітопровідного матеріалу, які утворюють магнітне коло і знаходяться з внутрішнього боку робочої поверхні пристрою. Крім того, рухома частина знаходиться знизу по відношенню до нерухомою і виконана з можливістю лінійного зсуву вниз відносно неї, для чого до складу пристрою-прототипу введений гідравлічний привід рухомої частини і ручний насоснагнітач олії у гідросистему цього гідроприводу. Зазначені полюси встановлені як на рухомій, так і на відносно нерухомій частинах, при цьому на останній вони встановлені між постійними магнітами, а на рухомій частині - так, що знаходяться ю о ю 5705 біля кінців полюсів нерухомої частини, утворюючи магнітне коло. Головним недоліком цього пристрою є необхідність застосування гідравлічного приводу для забезпечення відносного переміщення його рухомої частини, а також додаткові витрати електричної енергії або використання ручної праці під час роботи насоса-нагнітача. В основу корисної моделі поставлено завдання створення магнітоелектричного вантажозахоплювалього пристрою спрощеної і більш надійної конструкції, який би водночас забезпечував зменшення споживання електричної енергії під час захоплювання або відпускання вантажу. Розв'язання задачі здійснюється за допомогою запропонованого магнітоелектричного вантажозахоплювалього пристрою, який має рухому частину і виконану складовою відносно нерухому частину, принаймні один постійний магніт, зовнішні робочі поверхні для утримування вантажу, при цьому нерухома частина включає просторово відділені одна від одної складові частини, а на рухомій частині розміщено принаймні одну пару полюсів. Нерухому частину виконано у вигляді статора, на внутрішніх поверхнях якого виконано принаймні два пази, у яких укладена обмотка керування, наприклад, з двома послідовно або паралельно з'єднаними секціями, а у середині зазначеного статора встановлено з можливістю повороту на кут, що дорівнює половині кута полюсного ділення, рухому частину, що має вигляд індуктора, в якому розміщений принаймні один постійний магніт і який центровано за допомогою підшипникових опор у статорі з мінімальним повітряним проміжком, зовнішні робочі поверхні розміщені на статорі, вісь, яка проходить через центри пазів і центр індуктора, має однакові кутові нахили по відношенню до двох крайніх положень останнього, при цьому пази статора з обмоткою керування при знаходженні індуктора у зоні між зазначеними крайніми положеннями постійно знаходяться під дією магнітних полюсів відповідної полярності. Введення в магнітоелектричний вантажозахоплювальий пристрій індуктора з розміщеними на ньому постійним магнітом і полюсами, центрованого за допомогою підшипникових опор у статорі з можливістю повороту від свого початкового положення на кут, максимальна величина якого дорівнює половині кута полюсного ділення, і використання статора, виконаного із складових частин, відділених одна від одної немагнітними прошарками, за умов розміщення осі, яка проходить через центри пазів і центр індуктора, під однаковими кутами по відношенню до двох крайніх його положень, дозволило забезпечити спрощення і більшу надійність конструкції пристрою, у якому створюється обертовий момент індуктора при поданні сигналу керування, а в наслідок встановлення індуктора в робоче положення (яке визначається саме максимальним кутом відносного повороту) забезпечити замикання магнітного потоку через коло, до складу якого входить сам вантаж. Завдяки зазначеному забезпечуються умови для притягування і утримування вантажу за рахунок дії постійного магніту без необхідності постійного споживання електроенергії під час утримування вантажу, тобто водночас забезпечується зменшення споживання електричної енергії. Створення зазначеного обертового моменту можливе лише за умов, коли полюси індуктора в своїх крайніх положеннях знаходяться відповідно у зонах дії магнітних полюсів тієї ж полярності. Із зазначеного очевидно, що ознаки, наведені у патентній формулі знаходяться у причиннонаслідковому зв'язку, саме завдяки якому створюється нова якість пристрою відповідно до поставленого завдання. При цьому кожна з цих ознак (в тому числі і кожна введена нова і зазначена у відрізняльній частині формули ознака) направлена на розв'язання завдання згідно з поставленою метою і являється істотною у зазначеній сукупності, а запропонована сукупність ознак в цілому є необхідною і достатньою для розв'язання поставленого завдання. На момент подання заявки авторам і заявнику не відоме використання запропонованої сукупності ознак для розв'язання завдання, поставленого створеною корисною моделлю. Отже запропонований пристрій відповідає критерію "новизна і винахідницький крок". Суть запропонованого технічного рішення пояснюється ілюстраціями, наведеними: Фіг.1 - Схема одного з можливих варіантів конструкції магнітної системи магнітоелектричного вантажозахоплювалього пристрою; Фіг.2 - Загальний вигляд магнітоелектричного вантажозахоплювалього пристрою. Магнітна система запропонованого пристрою, наведена на Фіг. 1, містить складний статор 1 з магнітопровідної сталі, який служить частиною магнітопроводу для робочого магнітного потоку. Складові частини статора відділені одна від одної немагнітними прошарками 2. На зовнішній поверхні статора розміщені робочі поверхні пристрою З, які знаходяться у безпосередньому контакті з вантажем 4 під час його захоплення. З боку внутрішньої поверхні статора 1 розміщений індуктор 5, до складу якого входять постійний магніт 6 і полюси 7. Індуктор 5 виконаний з можливістю повороту відносно свого початкового (неробочого) положення на кут, максимальна величина якого дорівнює половині кута полюсного ділення. На внутрішній поверхні статора 1 виконані пази, у яких укладено обмотку керування 8, яка складається з двох секцій, які з'єднані, наприклад, послідовно. При цьому вісь, яка проходить через центри пазів і центр індуктора, має однакові кутові нахили по відношенню до двох крайніх положень індуктора, при цьому провідники обмотки, укладеної в пазах статора і призначеної для керування пристроєм, наприклад, за допомогою короткочасних імпульсів змінної полярності, постійно знаходяться у зоні дії магнітного полюса тієї ж полярності. Індуктор 5 встановлений у статорі 1 за допомогою підшипникових опор 9 (див. Фіг.2), у яких центровані вихідні кінці валу 10 індуктора 5 для зменшення власного моменту тертя, а для зменшення втрат електромагнітної і магнітної енергії в зазорі між статором і індуктором (див. Фіг.1) величина останнього виконується мінімальною. Пристрій кріпиться (див. Фіг.2) до підйомного механіз 5705 му (на Фіг.2 не наведений) за допомогою кронштейну 11. Рукоятка 12 для ручного повороту індуктора в разі потреби, наприклад, за умов аварійного вимкнення струму, закріплена на вихідному валу індуктора. Вантажозахоплювальий пристрій працює таким чином. Коли радіальна вісь полюсів направлена вздовж осі У (неробоче положення), магнітний потік, створюваний постійним магнітом замикається крізь статор і обминає стальний вантаж. Сила протягування в зоні робочих поверхонь статора відсутня. Коли на керуючу обмотку надходить відповідний імпульс, завдяки якому індуктор повертається в статорі на кут фмакс При цьому радіальна вісь полюсів направлена вздовж осі X (робоче положення індуктора), магнітний потік замикається крізь стальний вантаж і притягує його до робочих поверхонь статора. Вантаж утримується за умов відсутності зовнішнього електричного живлення. При необхідності відпускання вантажу на керуючу обмотку надходить імпульс протилежної полярності, завдяки якому індуктор повертається у неробоче положення, магнітний потік, створюваний постійним магнітом замикається крізь статор і обминає стальний вантаж, сила притягування в зоні робочих поверхонь статора спадає до нуля, вантаж звільнюється. Для створювання обертового моменту полюси індуктора повинні постійно знаходитись у зоні дії електрома гнітного поля тих самих частин керуючої обмотки. Для запобігання порушення цієї умови в конструкцію пристрою введені запобіжні упори (на Фіг.1 і 2 не наведені), встановлені так, що обмежують відповідні кути повороту індуктора. Таким чином, при захоплюванні і відпусканні вантажу потрібні лише короткочасні імпульси струму. Зміна напрямку магнітного потоку здійснюється без використання додаткових пристроїв завдяки взаємодії робочого потоку з короткочасним імпульсом струму обмотки керування, що являється складовою частиною самого пристрою. Отже корисна модель забезпечує виконання поставленого завдання: спрощено і підвищено надійність конструкції магнітоелектричного вантажозахоплювалього пристрою, при цьому водночас забезпечено зменшення споживання електричної енергії під час захоплювання або відпускання вантажу. При виготовленні запропонованого пристрою використовують матеріали, технологічні прийоми, оснастку і апаратуру, звичайно застосовувані в електротехніці і при виготовленні електричних машин. Промислову придатність і ефективність дії запропонованого магнітоелектричного вантажозахоплювалього пристрою підтверджено тестуванням виготовлених макетів. ФІг.2 Фіг.1 Комп'ютерна верстка А. Крижанівський Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. К и ї в - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromagnetic load handling device
Автори англійськоюKlymenko Viktor Mykytovych
Назва патенту російськоюМагнитоэлектрическое грузозахватное устройство
Автори російськоюКлименко Виктор Никитович
МПК / Мітки
МПК: B66C 1/00
Мітки: пристрій, магнітоелектричний, вантажозахоплювальний
Код посилання
<a href="https://ua.patents.su/4-5705-magnitoelektrichnijj-vantazhozakhoplyuvalnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Магнітоелектричний вантажозахоплювальний пристрій</a>
Вантажозахоплювальний пристрій
Номер патенту: 70813
Опубліковано: 15.10.2004
Автори: Баранов Михайло Григорович, Боярченко Леонід Федосійович, Ірха Віктор Миколайович
МПК: B66C 1/22
Мітки: пристрій, вантажозахоплювальний
Формула / Реферат:
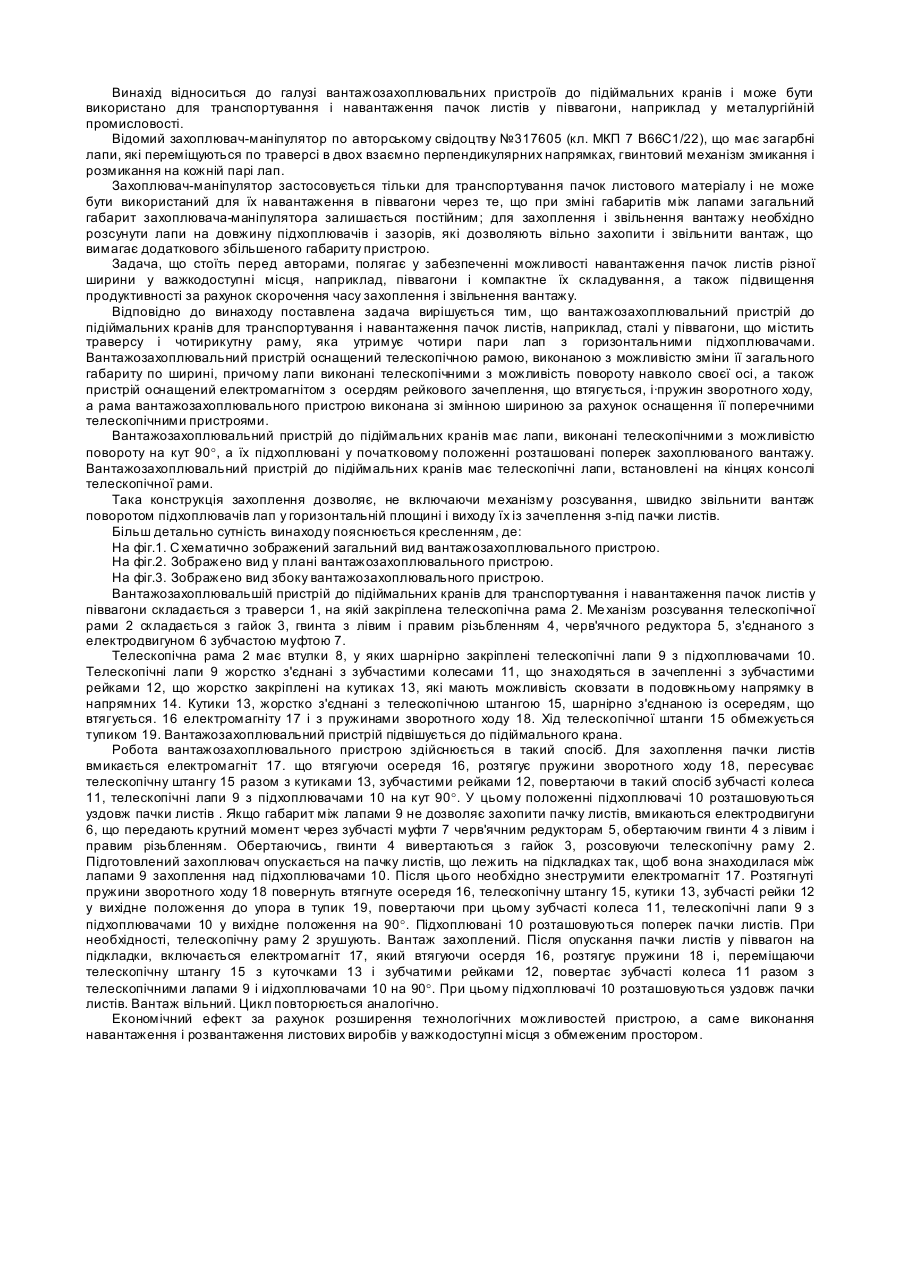
1. Вантажозахоплювальний пристрій до підіймальних кранів, що містить траверсу і чотирикутну раму, яка утримує чотири пари лап з горизонтальними підхоплювачами, який відрізняється тим, що оснащений телескопічною рамою, виконаною з можливістю зміни її загального габариту по ширині, причому лапи виконані телескопічними з можливістю повороту навколо своєї осі, а також пристрій оснащений електромагнітом з осердям, що втягується, рейковим...
Магнітоелектричний двигун
Номер патенту: 22485
Опубліковано: 03.03.1998
Автори: Білий Павло Миколайович, Афонін Анатолій Олексійович
МПК: H02K 21/00
Мітки: двигун, магнітоелектричний
Формула / Реферат:
Магнитоэлектрический двигатель, содержащий статор, выполненный в виде зубчатого магнитопровода, в пазах которого размещена обмотка возбуждения, и ротор, выполненный в виде установленного на валу ферромагнитного диска с закрепленными на нем парами постоянных магнитов разноименной полярности, при этом ротор и статор расположены с зазором друг относительно друга, отличающийся тем, что в упомянутом зазоре расположена дополнительная обмотка...
Вантажозахоплювальний механізм
Номер патенту: 429
Опубліковано: 12.11.1999
Автори: Власенко Віктор Іванович, Омельченко Володимир Іванович, Анохін Юрій Олександрович, Карпов Володимир Петрович
Мітки: вантажозахоплювальний, механізм
Формула / Реферат:
1. Вантажозахоплювальний механізм, що містить два шарнірно сполучених важелі з вантажозахоплювальними кінцями, який відрізняється тим, що один із важелів виконаний із вушком з боку, протилежному вантажозахоплювальному кінцю цього важеля, з можливістю-з'єднання з вантажопідйомним механізмом, а другий важіль постачений регульованим фіксатором відносного кута повороту зазначених важелів у їхньому шарнірному з'єднанні.2....
Автономний магнітоелектричний гусеничний рушій
Номер патенту: 65559
Опубліковано: 15.04.2004
Автори: Троц Анатолій Степанович, Борисюк Михайло Дем'янович, Беліков Віктор Тріфонович, Головань Вячеслав Грігорійович, Дяченко Олександр Феодосійович
МПК: B62D 55/08, B62D 55/18
Мітки: магнітоелектричний, рушій, автономний, гусеничний
Формула / Реферат:
1. Автономний магнітоелектричний гусеничний рушій, що складається з шарнірно з'єднаних гусеничних траків, який відрізняється тим, що траки виконані з немагнітного матеріалу з феромагнітними вставками, а у середині гусеничного рушія закріплений тяговий привід гусениці, виконаний у вигляді лінійного магнітоелектричного двигуна, постійні магніти якого створюють електромагнітне поле, що забезпечує необхідну силу притискання до сталевої поверхні,...
Магнітоелектричний спосіб вимірювання швидкості руху об’єкта
Номер патенту: 40603
Опубліковано: 15.08.2001
Автор: Джурук Володимир Юрійович
МПК: G01P 3/42
Мітки: вимірювання, руху, швидкості, спосіб, магнітоелектричний, об'єкта
Формула / Реферат:
Магнитоэлектрический способ изменения скорости движения объекта, заключающийся в том, что измеряют выходной сигнал датчика и по нему судят о скорости движения объекта, отличающийся тем, что датчик устанавливают на объекте, а в качестве датчика используют постоянный магнит с обмоткой, вращают его вокруг оси, перпендикулярной направлению движения объекта, и скорость V движения объекта определяют по формулегдеС -...
Попередній патент: Спосіб електрокальцинації сипучого вуглецевого матеріалу
Наступний патент: Піч для обігріву приміщення
Випадковий патент: Роз'ємна пробірка кононенка ю.г. для проведення гірудотерапії