Автономний магнітоелектричний гусеничний рушій
Номер патенту: 65559
Опубліковано: 15.04.2004
Автори: Головань Вячеслав Грігорійович, Дяченко Олександр Феодосійович, Борисюк Михайло Дем'янович, Троц Анатолій Степанович, Беліков Віктор Тріфонович
Формула / Реферат
1. Автономний магнітоелектричний гусеничний рушій, що складається з шарнірно з'єднаних гусеничних траків, який відрізняється тим, що траки виконані з немагнітного матеріалу з феромагнітними вставками, а у середині гусеничного рушія закріплений тяговий привід гусениці, виконаний у вигляді лінійного магнітоелектричного двигуна, постійні магніти якого створюють електромагнітне поле, що забезпечує необхідну силу притискання до сталевої поверхні, а також функціонування тягового приводу.
2. Автономний магнітоелектричний гусеничний рушій за пунктом 1, який відрізняється тим, що лінійний магнітоелектричний привід гусеничного рушія виконаний у вигляді шарнірно з'єднаних блоків - модулів лінійного магнітоелектричного двигуна.
3. Автономний магнітоелектричний гусеничний рушій за пунктом 1, який відрізняється тим, що складається з двох автономних магнітоелектричних гусеничних модулів, що приєднуються до загальної транспортної платформи.
4. Автономний магнітоелектричний гусеничний рушій за пунктом 1, який відрізняється тим, що складається з декількох автономних магнітоелектричних гусеничних модулів, що приєднуються до загальної транспортної платформи та мають можливість повороту відносно повздовжньої осі платформи.
Текст
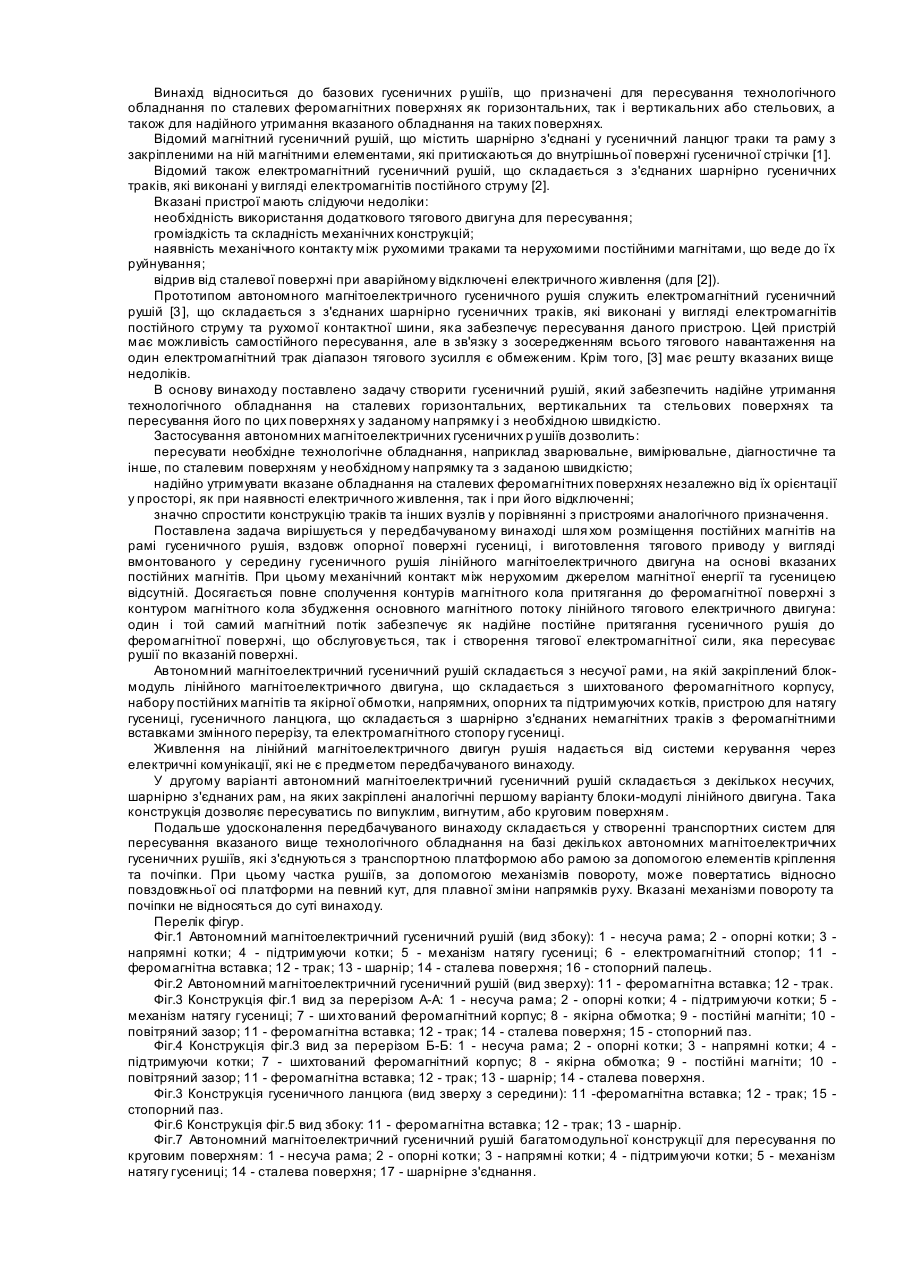
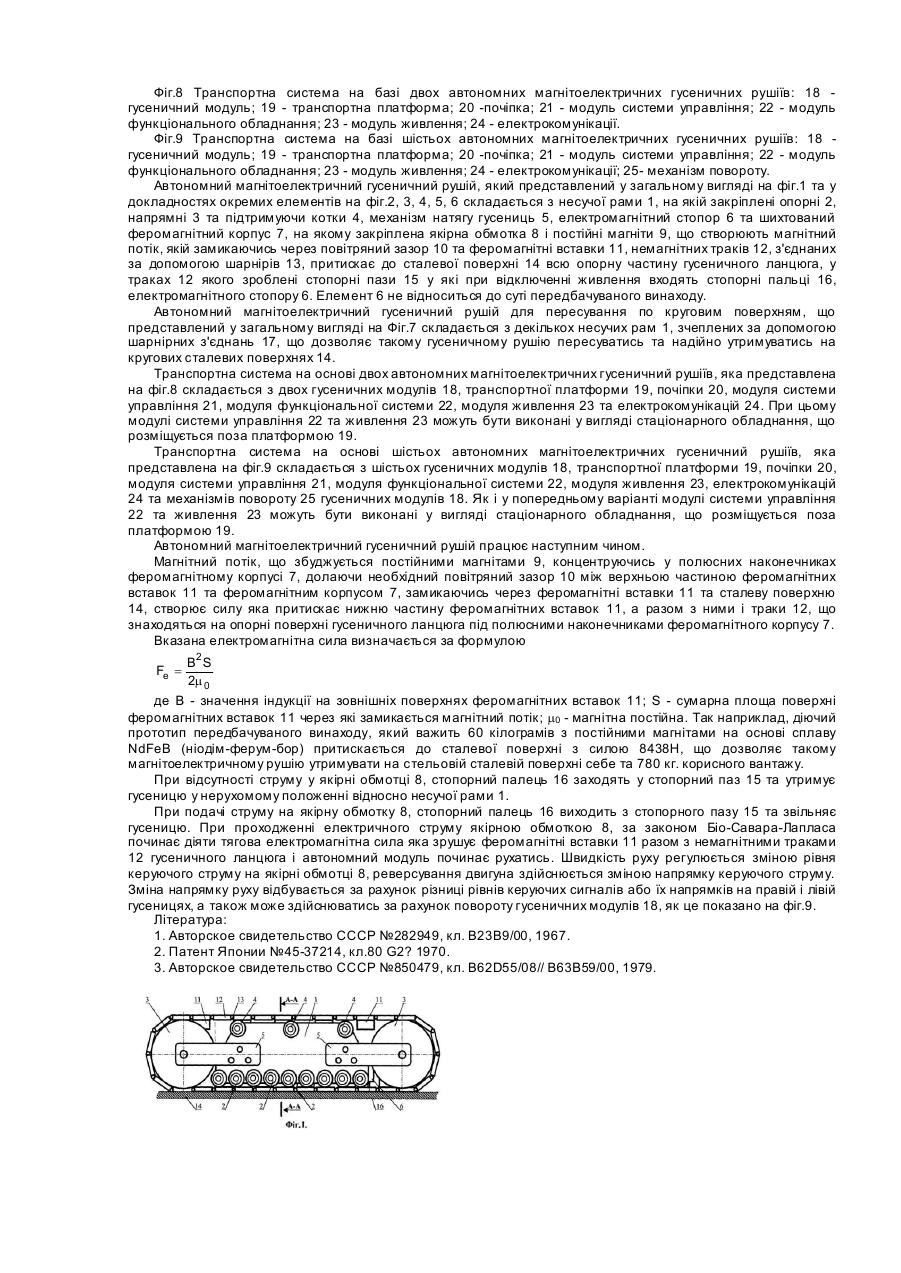
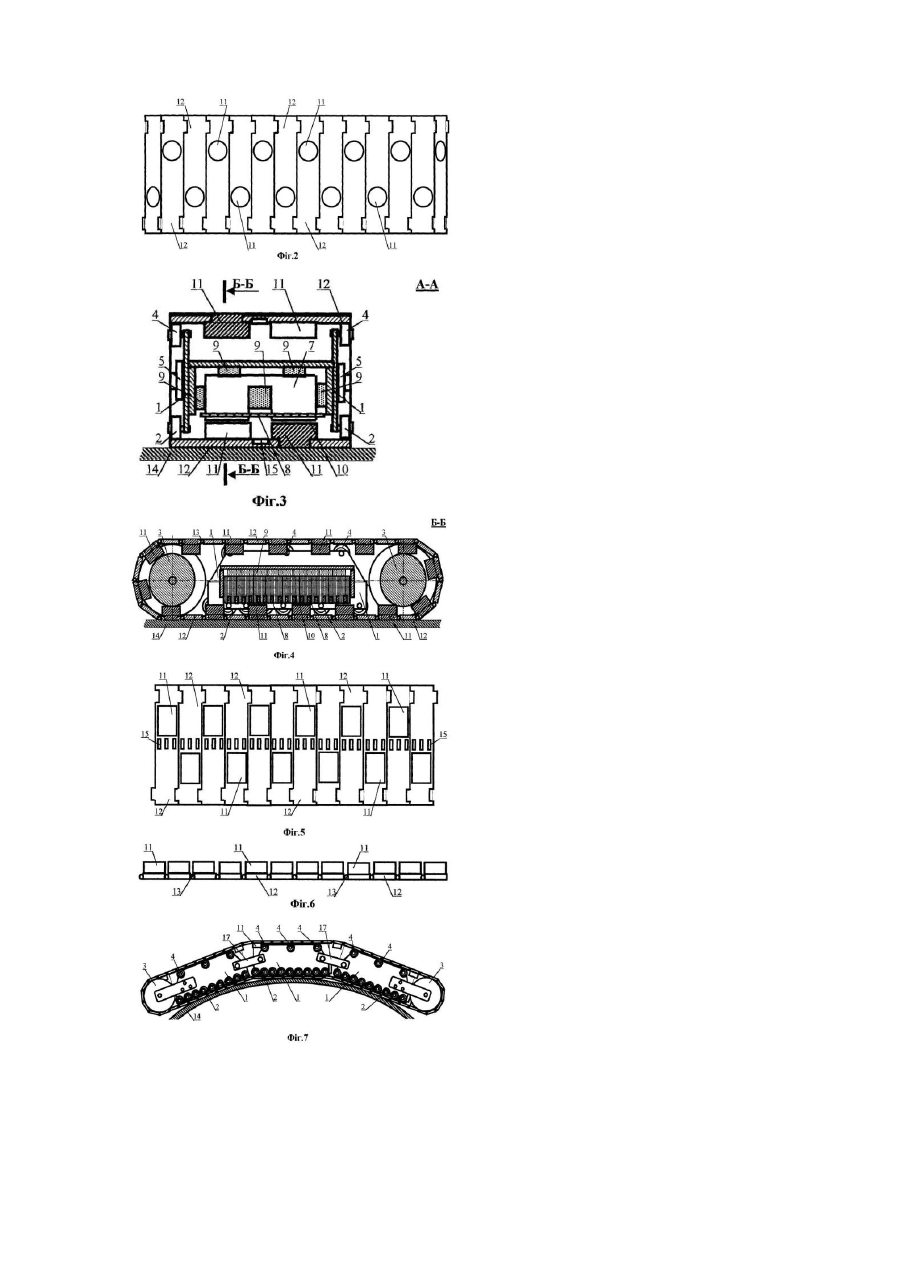
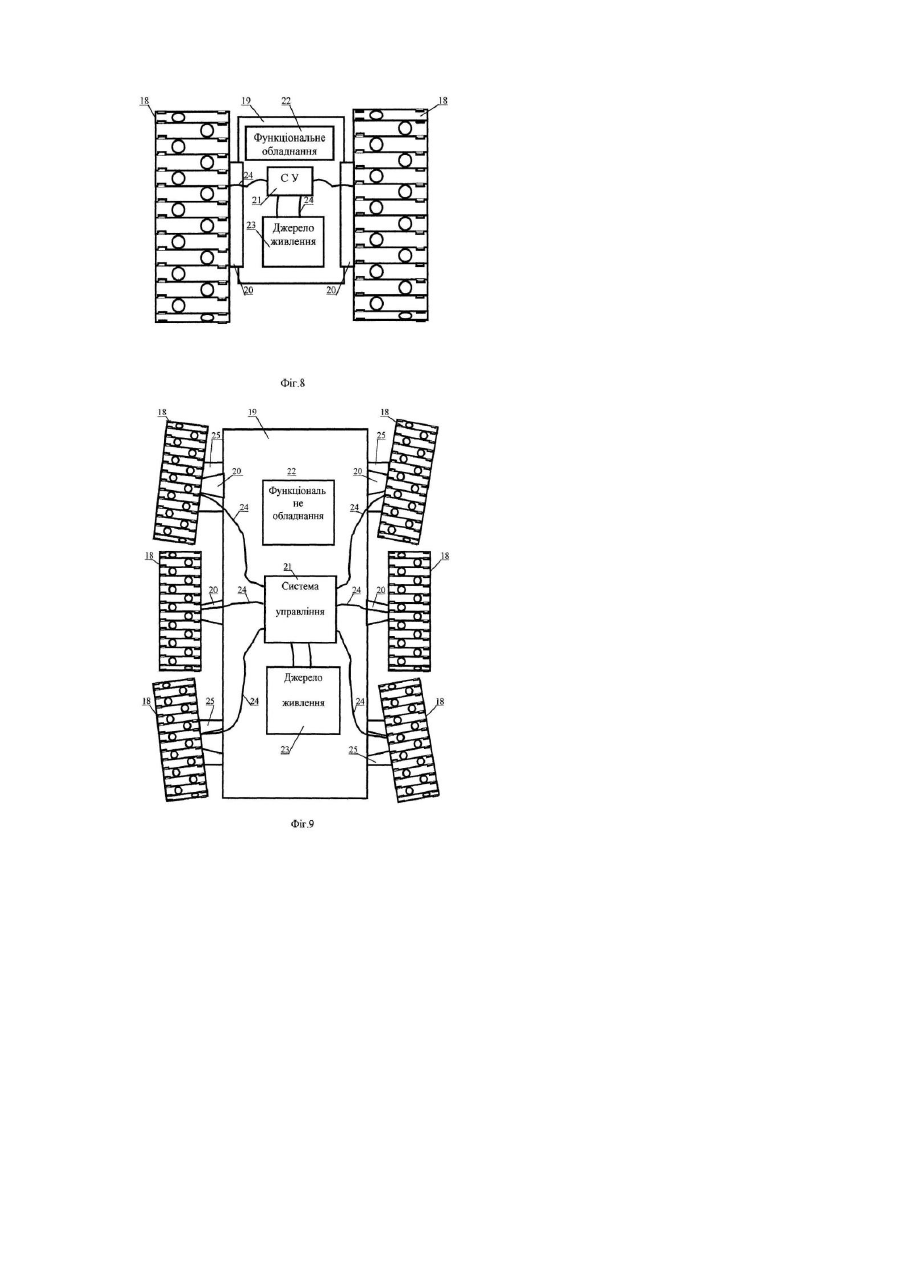
Винахід відноситься до базових гусеничних р ушіїв, що призначені для пересування технологічного обладнання по сталевих феромагнітних поверхнях як горизонтальних, так і вертикальних або стельових, а також для надійного утримання вказаного обладнання на таких поверхнях. Відомий магнітний гусеничний рушій, що містить шарнірно з'єднані у гусеничний ланцюг траки та раму з закріпленими на ній магнітними елементами, які притискаються до внутрішньої поверхні гусеничної стрічки [1]. Відомий також електромагнітний гусеничний рушій, що складається з з'єднаних шарнірно гусеничних траків, які виконані у вигляді електромагнітів постійного струму [2]. Вказані пристрої мають слідуючи недоліки: необхідність використання додаткового тягового двигуна для пересування; громіздкість та складність механічних конструкцій; наявність механічного контакту між рухомими траками та нерухомими постійними магнітами, що веде до їх руйнування; відрив від сталевої поверхні при аварійному відключені електричного живлення (для [2]). Прототипом автономного магнітоелектричного гусеничного рушія служить електромагнітний гусеничний рушій [3 ], що складається з з'єднаних шарнірно гусеничних траків, які виконані у вигляді електромагнітів постійного струму та рухомої контактної шини, яка забезпечує пересування даного пристрою. Цей пристрій має можливість самостійного пересування, але в зв'язку з зосередженням всього тягового навантаження на один електромагнітний трак діапазон тягового зусилля є обмеженим. Крім того, [3] має решту вказаних вище недоліків. В основу винаходу поставлено задачу створити гусеничний рушій, який забезпечить надійне утримання технологічного обладнання на сталевих горизонтальних, вертикальних та стельових поверхнях та пересування його по цих поверхнях у заданому напрямку і з необхідною швидкістю. Застосування автономних магнітоелектричних гусеничних р ушіїв дозволить: пересувати необхідне технологічне обладнання, наприклад зварювальне, вимірювальне, діагностичне та інше, по сталевим поверхням у необхідному напрямку та з заданою швидкістю; надійно утримувати вказане обладнання на сталевих феромагнітних поверхнях незалежно від їх орієнтації у просторі, як при наявності електричного живлення, так і при його відключенні; значно спростити конструкцію траків та інших вузлів у порівнянні з пристроями аналогічного призначення. Поставлена задача вирішується у передбачуваному винаході шля хом розміщення постійних магнітів на рамі гусеничного рушія, вздовж опорної поверхні гусениці, і виготовлення тягового приводу у вигляді вмонтованого у середину гусеничного рушія лінійного магнітоелектричного двигуна на основі вказаних постійних магнітів. При цьому механічний контакт між нерухомим джерелом магнітної енергії та гусеницею відсутній. Досягається повне сполучення контурів магнітного кола притягання до феромагнітної поверхні з контуром магнітного кола збудження основного магнітного потоку лінійного тягового електричного двигуна: один і той самий магнітний потік забезпечує як надійне постійне притягання гусеничного рушія до феромагнітної поверхні, що обслуговується, так і створення тягової електромагнітної сили, яка пересуває рушії по вказаній поверхні. Автономний магнітоелектричний гусеничний рушій складається з несучої рами, на якій закріплений блокмодуль лінійного магнітоелектричного двигуна, що складається з шихтованого феромагнітного корпусу, набору постійних магнітів та якірної обмотки, напрямних, опорних та підтримуючих котків, пристрою для натягу гусениці, гусеничного ланцюга, що складається з шарнірно з'єднаних немагнітних траків з феромагнітними вставками змінного перерізу, та електромагнітного стопору гусениці. Живлення на лінійний магнітоелектричного двигун рушія надається від системи керування через електричні комунікації, які не є предметом передбачуваного винаходу. У другому варіанті автономний магнітоелектричний гусеничний рушій складається з декількох несучих, шарнірно з'єднаних рам, на яких закріплені аналогічні першому варіанту блоки-модулі лінійного двигуна. Така конструкція дозволяє пересуватись по випуклим, вигнутим, або круговим поверхням. Подальше удосконалення передбачуваного винаходу складається у створенні транспортних систем для пересування вказаного вище технологічного обладнання на базі декількох автономних магнітоелектричних гусеничних рушіїв, які з'єднуються з транспортною платформою або рамою за допомогою елементів кріплення та почіпки. При цьому частка рушіїв, за допомогою механізмів повороту, може повертатись відносно повздовжньої осі платформи на певний кут, для плавної зміни напрямків руху. Вказані механізми повороту та почіпки не відносяться до суті винаходу. Перелік фігур. Фіг.1 Автономний магнітоелектричний гусеничний рушій (вид збоку): 1 - несуча рама; 2 - опорні котки; 3 напрямні котки; 4 - підтримуючи котки; 5 - механізм натягу гусениці; 6 - електромагнітний стопор; 11 феромагнітна вставка; 12 - трак; 13 - шарнір; 14 - сталева поверхня; 16 - стопорний палець. Фіг.2 Автономний магнітоелектричний гусеничний рушій (вид зверху): 11 - феромагнітна вставка; 12 - трак. Фіг.3 Конструкція фіг.1 вид за перерізом А-А: 1 - несуча рама; 2 - опорні котки; 4 - підтримуючи котки; 5 механізм натягу гусениці; 7 - ши хто ваний феромагнітний корпус; 8 - якірна обмотка; 9 - постійні магніти; 10 повітряний зазор; 11 - феромагнітна вставка; 12 - трак; 14 - сталева поверхня; 15 - стопорний паз. Фіг.4 Конструкція фіг.3 вид за перерізом Б-Б: 1 - несуча рама; 2 - опорні котки; 3 - напрямні котки; 4 підтримуючи котки; 7 - шихтований феромагнітний корпус; 8 - якірна обмотка; 9 - постійні магніти; 10 повітряний зазор; 11 - феромагнітна вставка; 12 - трак; 13 - шарнір; 14 - сталева поверхня. Фіг.3 Конструкція гусеничного ланцюга (вид зверху з середини): 11 -феромагнітна вставка; 12 - трак; 15 стопорний паз. Фіг.6 Конструкція фіг.5 вид збоку: 11 - феромагнітна вставка; 12 - трак; 13 - шарнір. Фіг.7 Автономний магнітоелектричний гусеничний рушій багатомодульної конструкції для пересування по круговим поверхням: 1 - несуча рама; 2 - опорні котки; 3 - напрямні котки; 4 - підтримуючи котки; 5 - механізм натягу гусениці; 14 - сталева поверхня; 17 - шарнірне з'єднання. Фіг.8 Транспортна система на базі двох автономних магнітоелектричних гусеничних рушіїв: 18 гусеничний модуль; 19 - транспортна платформа; 20 -почіпка; 21 - модуль системи управління; 22 - модуль функціонального обладнання; 23 - модуль живлення; 24 - електрокомунікації. Фіг.9 Транспортна система на базі шістьох автономних магнітоелектричних гусеничних рушіїв: 18 гусеничний модуль; 19 - транспортна платформа; 20 -почіпка; 21 - модуль системи управління; 22 - модуль функціонального обладнання; 23 - модуль живлення; 24 - електрокомунікації; 25- механізм повороту. Автономний магнітоелектричний гусеничний рушій, який представлений у загальному вигляді на фіг.1 та у докладностях окремих елементів на фіг.2, 3, 4, 5, 6 складається з несучої рами 1, на якій закріплені опорні 2, напрямні 3 та підтримуючи котки 4, механізм натягу гусениць 5, електромагнітний стопор 6 та шихтований феромагнітний корпус 7, на якому закріплена якірна обмотка 8 і постійні магніти 9, що створюють магнітний потік, якій замикаючись через повітряний зазор 10 та феромагнітні вставки 11, немагнітних траків 12, з'єднаних за допомогою шарнірів 13, притискає до сталевої поверхні 14 всю опорну частину гусеничного ланцюга, у траках 12 якого зроблені стопорні пази 15 у які при відключенні живлення входять стопорні пальці 16, електромагнітного стопору 6. Елемент 6 не відноситься до суті передбачуваного винаходу. Автономний магнітоелектричний гусеничний рушій для пересування по круговим поверхням, що представлений у загальному вигляді на Фіг.7 складається з декількох несучих рам 1, зчеплених за допомогою шарнірних з'єднань 17, що дозволяє такому гусеничному рушію пересуватись та надійно утримуватись на кругових сталевих поверхнях 14. Транспортна система на основі двох автономних магнітоелектричних гусеничний рушіїв, яка представлена на фіг.8 складається з двох гусеничних модулів 18, транспортної платформи 19, почіпки 20, модуля системи управління 21, модуля функціональної системи 22, модуля живлення 23 та електрокомунікацій 24. При цьому модулі системи управління 22 та живлення 23 можуть бути виконані у вигляді стаціонарного обладнання, що розміщується поза платформою 19. Транспортна система на основі шістьох автономних магнітоелектричних гусеничний рушіїв, яка представлена на фіг.9 складається з шістьох гусеничних модулів 18, транспортної платформи 19, почіпки 20, модуля системи управління 21, модуля функціональної системи 22, модуля живлення 23, електрокомунікацій 24 та механізмів повороту 25 гусеничних модулів 18. Як і у попередньому варіанті модулі системи управління 22 та живлення 23 можуть бути виконані у вигляді стаціонарного обладнання, що розміщується поза платформою 19. Автономний магнітоелектричний гусеничний рушій працює наступним чином. Магнітний потік, що збуджується постійними магнітами 9, концентруючись у полюсних наконечниках феромагнітному корпусі 7, долаючи необхідний повітряний зазор 10 між верхньою частиною феромагнітних вставок 11 та феромагнітним корпусом 7, замикаючись через феромагнітні вставки 11 та сталеву поверхню 14, створює силу яка притискає нижню частину феромагнітних вставок 11, а разом з ними і траки 12, що знаходяться на опорні поверхні гусеничного ланцюга під полюсними наконечниками феромагнітного корпусу 7. Вказана електромагнітна сила визначається за формулою B2 S 2m 0 де В - значення індукції на зовнішніх поверхнях феромагнітних вставок 11; S - сумарна площа поверхні феромагнітних вставок 11 через які замикається магнітний потік; m0 - магнітна постійна. Так наприклад, діючий прототип передбачуваного винаходу, який важить 60 кілограмів з постійними магнітами на основі сплаву NdFeB (ніодім-ферум-бор) притискається до сталевої поверхні з силою 8438Н, що дозволяє такому магнітоелектричному рушію утримувати на стельовій сталевій поверхні себе та 780 кг. корисного вантажу. При відсутності струму у якірні обмотці 8, стопорний палець 16 заходять у стопорний паз 15 та утримує гусеницю у нерухомому положенні відносно несучої рами 1. При подачі струму на якірну обмотку 8, стопорний палець 16 виходить з стопорного пазу 15 та звільняє гусеницю. При проходженні електричного струму якірною обмоткою 8, за законом Біо-Савара-Лапласа починає діяти тягова електромагнітна сила яка зрушує феромагнітні вставки 11 разом з немагнітними траками 12 гусеничного ланцюга і автономний модуль починає рухатись. Швидкість руху регулюється зміною рівня керуючого струму на якірні обмотці 8, реверсування двигуна здійснюється зміною напрямку керуючого струму. Зміна напрямку руху відбувається за рахунок різниці рівнів керуючих сигналів або їх напрямків на правій і лівій гусеницях, а також може здійснюватись за рахунок повороту гусеничних модулів 18, як це показано на фіг.9. Література: 1. Авторское свидетельство СССР №282949, кл. В23В9/00, 1967. 2. Патент Японии №45-37214, кл.80 G2? 1970. 3. Авторское свидетельство СССР №850479, кл. В62D55/08// В63В59/00, 1979. Fe =
ДивитисяДодаткова інформація
Назва патенту англійськоюAutonomous electromagnetic track-type propeller
Автори англійськоюBelikov Viktor Tryfonovych, Borysiuk Mykhailo Dem'ianovych, Diachenko Oleksandr Feodosiiovych
Назва патенту російськоюАвтономный магнитоэлектрический гусеничный движитель
Автори російськоюБеликов Виктор Трифонович, Борисюк Михаил Демьянович, Дяченко Александр Феодосиевич
МПК / Мітки
МПК: B62D 55/08, B62D 55/18
Мітки: рушій, автономний, гусеничний, магнітоелектричний
Код посилання
<a href="https://ua.patents.su/4-65559-avtonomnijj-magnitoelektrichnijj-gusenichnijj-rushijj.html" target="_blank" rel="follow" title="База патентів України">Автономний магнітоелектричний гусеничний рушій</a>
Гусеничний рушій транспортного засобу
Номер патенту: 26468
Опубліковано: 30.08.1999
Автори: Єдінцов Віталій Михайлович, Устименко Євген Іванович
МПК: B62D 55/00, B60S 1/00
Мітки: транспортного, гусеничний, засобу, рушій
Формула / Реферат:
1. Гусеничный движитель транспортного средства, содержащий ведущее колесо, опорные катки, закрепленные на концах качающихся балансиров с возможностью вращения на осях, гусеницу, охватывающую опорные катки, и ведущее колесо, и защитные экраны, установленные между опорными катками, отличающийся тем, что защитные экраны выполнены C-образными, по ширине не превышающими ширины опорных катков, и закреплены на балансирах со стороны опорной ветви...
Гусеничний рушій зачеплення
Номер патенту: 4489
Опубліковано: 27.12.1994
Автори: Устименко Євген Іванович, Олєйніков Микола Георгійович, Кизилов Артур Миколайович
МПК: B62D 55/08
Мітки: гусеничний, зачеплення, рушій
Формула / Реферат:
Гусеничный движитель зацепления, содержащий ведущее колесо, выполненное с наружными основным и внутренним дополнительным венцами и гусеничную цепь, включающую в себя опорные плиты звеньев с цевками для взаимодействия с венцами ведущего колеса, выполненными на краях опорных плит звеньев гусеничной цепи, отличающийся тем, что, с целью повышения долговечности путем увеличения поверхности контакта дополнительных венцов со звеньями гусеничной...
Гусеничний рушій транспортного засобу

Номер патенту: 26294
Опубліковано: 19.07.1999
Автори: Олєйніков Микола Георгійович, Кизилов Артур Миколаєвич, Устименко Євген Іванович, Шуліков Олександр Сергійович
МПК: B62D 55/14, B62D 55/08
Мітки: транспортного, засобу, гусеничний, рушій
Формула / Реферат:
1. Гусеничный движитель транспортного средства, содержащий поддерживающий каток, установленный с возможностью вращения на кронштейне, выполненном за одно целое с фланцем и закрепленном на борту транспортного средства посредством регулировочных шайб крепежными элементами, отличающийся тем, что фланец кронштейна и крепежные элементы выполнены с проушинами, соединенными между собой посредством резиновых втулок пальцами.2. Гусеничный...
Гусеничний рушій транспортного засобу
Номер патенту: 6907
Опубліковано: 31.03.1995
Автори: Горяшко Петро Мойсейович, Шашков Микола Фролович, Лаврентьєв Сергій Володимирович, Прилуцький Олександр Юрійович
МПК: B62D 55/08
Мітки: засобу, гусеничний, рушій, транспортного
Текст:
...колеса под воздействием полностью сжатой пружины амортизатора. 5 Кроме того, при повороте транспортного средства возможно соскакивание гусеничной цепи. Таким образом, упругий ход С направляющего колеса, выбранный из условия выхо- 10 да гусеничной цепи из зацепления с зубьями ведущего колеса в режиме срабатывания амортизационно-натяжного механизма способствует снижению надежности деталей ходовой системы и трансмиссии, соскакива- 15 нию...
Гусеничний рушій транспортного засобу

Номер патенту: 6456
Опубліковано: 29.12.1994
Автори: Прилуцький Юрій Назарович, Прилуцький Олександр Юрійович, Лаврентьєв Сергій Володимирович, Абдула Сергій Леонідович, Шашков Микола Фролович
МПК: B62D 55/08
Мітки: засобу, гусеничний, рушій, транспортного
Формула / Реферат:
(57) 1. Гусеничный движитель транспортного средства, содержащий направляющие колеса с амортизационно-натяженными механизмами, включающими коленчатые оси, установленные поворотно на раме, гидроцилиндры натяжения гусеничных цепей, шарнирно соединенные одними концами с коленчатыми осями, а вторыми - с промежуточными рычагами, установленными поворотно на раме и соединенными между собой торсионной связью, отличающийся тем, что торсионная связь...
Попередній патент: Спосіб електролітичного одержання металів та сплавів і пристрій для його реалізації
Наступний патент: Спосіб видалення вищих органічних йодидів
Випадковий патент: Клапан керований