Датчик механічних переміщень
Номер патенту: 5723
Опубліковано: 29.12.1994
Автори: Лисенко Валентин Сергійович, Погиба Віктор Павлович, Богатиренко Євгеній Федорович
Формула / Реферат
Датчик механических перемещений, содержащий первичный преобразователь, выполненный в виде Ш-образного сердечника с размещенными на нем обмоткой возбуждения идвумя измерительными обмотками, тактовый генератор, соединенный с обмоткой возбуждения первичного преобразователя, подвижный элемент, установленный с возможностью перемещения относительно обмоток первичного преобразователя и интегратор, отличающийся тем, что он снабжен (n-1) первичными преобразователями, (n-1) интеграторами, где n - общее число преобразователей и общее число интеграторов, и тактируемым дешифратором, входы которого соединены с выходами интеграторов, тактовый вход - с выходом тактового генератора, входы интеграторов соединены с выходами соответствующих первичных преобразователей каждый из которых обмоткой возбуждения соединен с выходом тактового генератора, а его измерительные обмотки включены встречно - последовательно.
Текст
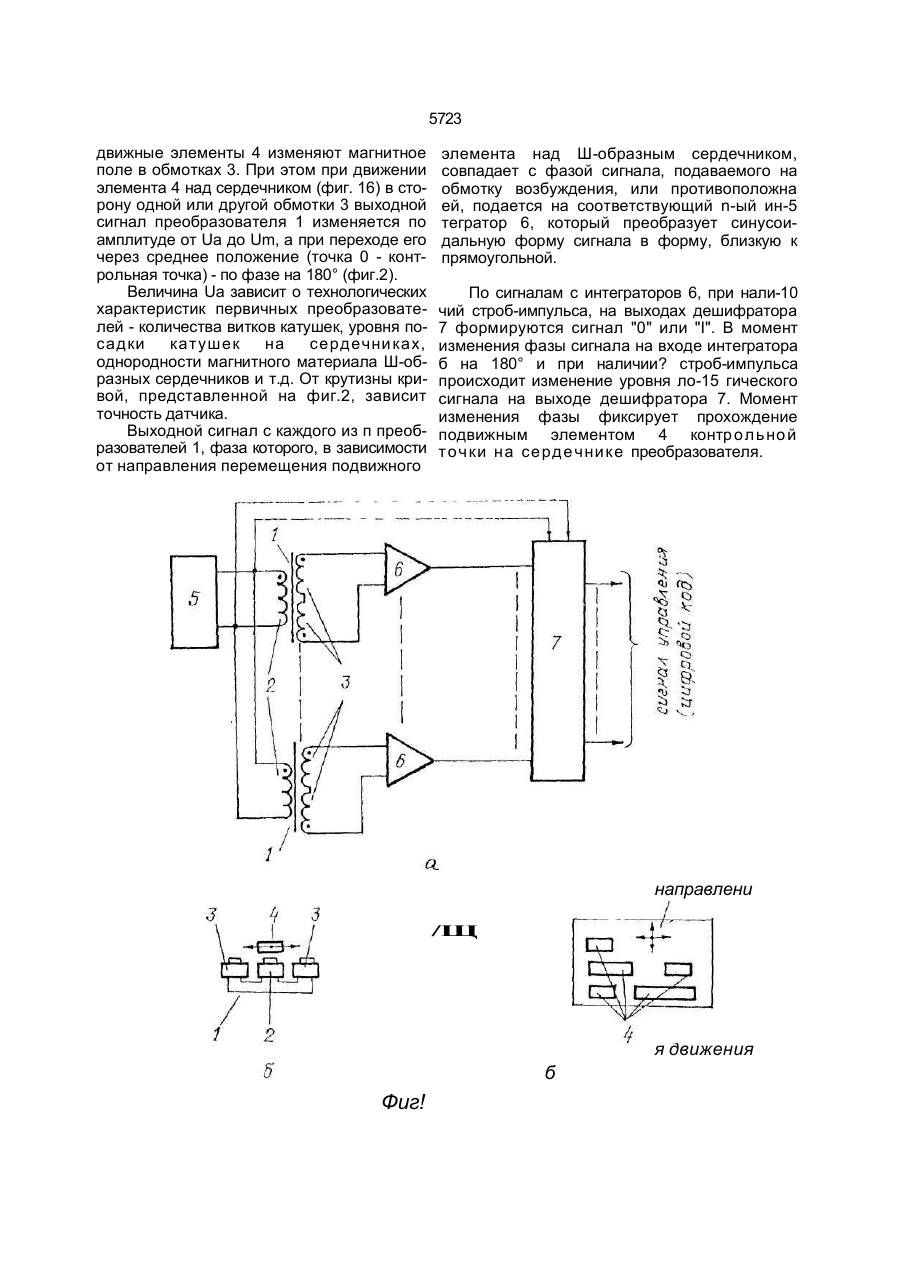
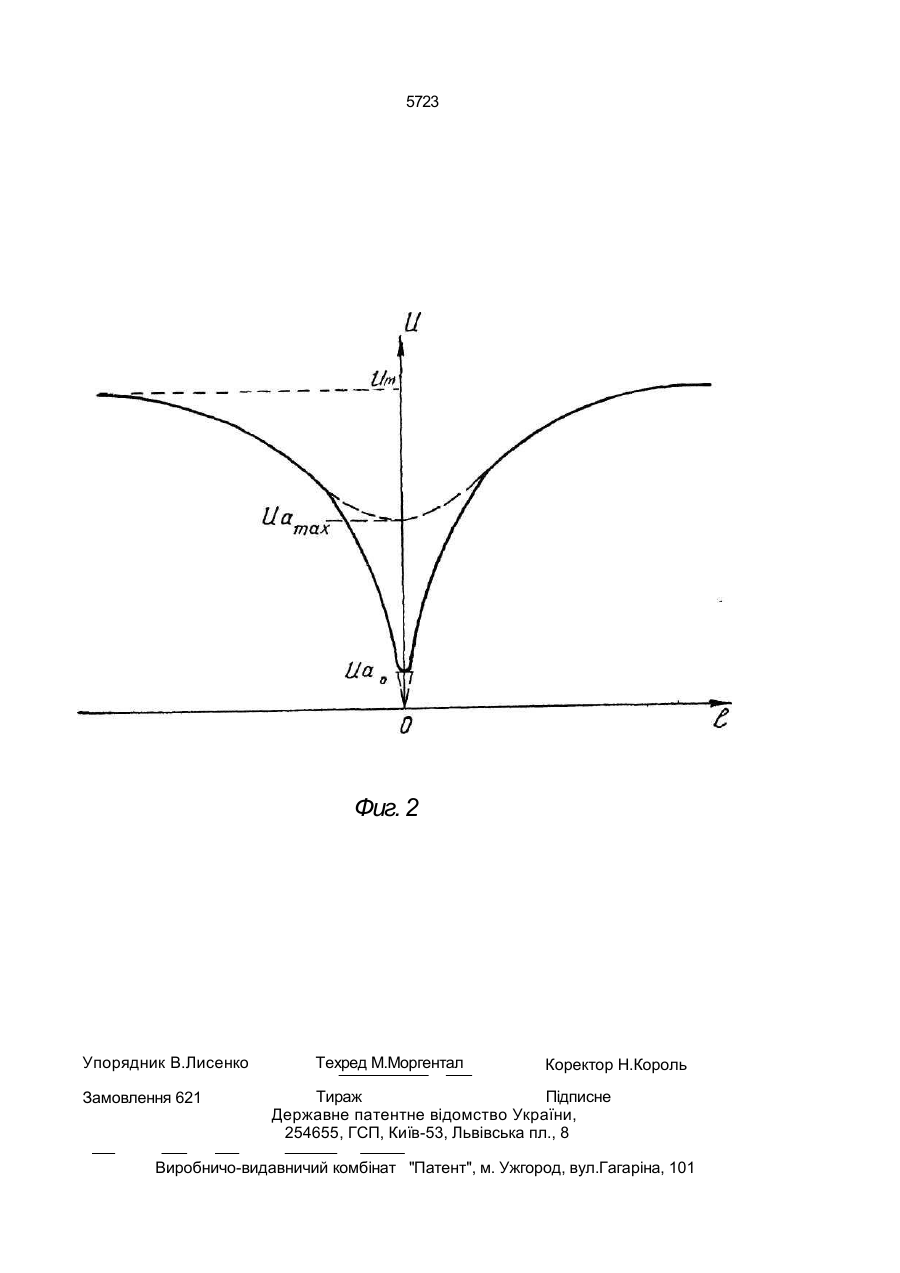
Датчик механических перемещений, со держащий первичный преобразователь, вы полненный в виде Ш-образного сердечника с размещенными на нем обмоткой возбуж дения и двумя измерительными обмотками, тактовый генератор, соединенный с обмогкой возбуждения первичного преобразова теля, подвижный элемент, установленный с возможностью перемещения относительно обмоток первичного преобразователя и интегратор, о т л и ч а ю щ и й с я тем, что он снабжен (п-1) первичными преобразователями, (п-1) интеграторами, где п - общее число преобразователей и общее число интеграторов, и тактируемым дешифратором входы которого соединены с выходами интеграторов, тактовый вход - с выходом тактового генератора, входы интеграторов соединены с выходами соответствующих первичных преобразователей каждый из которых обмоткой возбуждения соединен с выходом тактового генератора, а его измерительные обмотки включены встречно - последовательно. Изобретение относится к измерительной технике и может быть использовано для контроля положения движущихся объектов в устройствах автоматики и управления. В качестве прототипа выбран датчик механических перемещений, содержащий первичный преобразователь, выполненный в виде Ш-образного сердечника с размещенными на нем обмоткой возбуждения и двумя измерительными обмотками, и подвижный элемент, установленный с возможностью перемещения относительно обмоток первичного преобразователя. Обмотка возбуждения подключена к тактовому генератору, а измерительные обмотки - к схеме обработки сигналов, которая содержит фазовый ди скриминатор, два пороговых устройства лл интегратор, включенный между входами пороговых устройств и выходом фазового дискриминатора. Устройство-прототип имеет низкую точность, инерционность, является сложным, что обусловлено применением устройств для обработки аналогового сигнала и необходимостью наращивания объема схемы для получения сигнала в цифровом коде. Это приводит к снижению надежности датчика. Задача изобретения заключается в усовершенствовании датчика механических перемещений, обеспечивающего повышение точности и надежности путем формирования на выходе дешифратора величины изме (20) 94260826, 25.08.93 (21)4908466/28 (22) 08.01.91, SU (46)29.12.94. Бюл №8-1 (56) Авторское свидетельство СССР Ns 604508, кл. F 02 Р 3/04, 1972. (71) Лисенко Валентин Сергійович, Богатирекко Євгеній Федорович, Погиба Віктор Павлович (72) Лисенко Валентин Сергійович, Богатиренко Євгеній Федорович, Погиба Віктор Павлович (73) Товариство з обмеженою відповідальністю "Спільне українсько-аме риканське підприємство "ТЕРА" (UA) С > СЛ CO О 5723 нения уровня логического сигнала в виде цифрового кода. Решение задачи заключается в том, что датчик механических перемещений, содержащий первичный преобразователь, выпол- 5 ненный в виде Ш-образного сердечника с размещенными на нем обмоткой возбуждения и двумя измерительными обмотками, тактовый генератор, соединенный с обмоткой возбуждения первичного преобразова- 10 теля, подвижный элемент, установленный с возможностью перемещения относительно обмоток первичного преобразователя, и интегратор, согласно изобретению снабжен (п1) первичными преобразователями, (п-1) 15 интеграторами, где п - общее число преобразователей и общее число интеграторов и тактируемым дешифратором, входы которого соединены с выходами интеграторов, тактовый вход - с выходом тактового 20 генератора, входы интеграторов соединены с выходами соответствующих первичных преобразователей, каждый из которых обмоткой возбуждения подключен к выходу тактового генератора, а его измерительные 25 обмотки включены встречно-последовательно. Повышение точности и производительности измерений достигается путем фиксирования на выходе устройства изменения 30 уровня логического сигнала, что соответствует моменту изменения фазы сигнала на выходе п-го первичного преобразователя на 180° при прохождении подвижным элементом контрольной точки над Ш-образным 35 сердечником этого преобразователя. Количество (п) идентичных каналов, включающих последовательно соединенные преобразователь и интегратор, определяется необходимым диапазоном измерения пе- 40 ремещения. Так, для определения перемещения объекта по линии в пределах диапазона работы одного первичного преобразователя достаточно одного канала, при расширении диапазона измерений пе- 45 ремещений устанавливается необходимое число каналов. Взаимное расположение первичных преобразователей и подвижных элементов также определяется необходимым диапазо- 50 ном и точностью измерений. Например, увеличение диапазона измерений перемещений по одной линии достигается размещением двух первичных преобразователей и нескольких подвижных элементов, 55 расположенных таким образом, что когда очередной подвижный элемент выходит из зоны работы второго первичного преобразователя, следующий подвижный элемент уже вошел в зону работы первичного преобразо вателя. Сердечники с катушками и подвижные элементы могут располагаться и иным образом в зависимости от поставленной задачи, например, при одновременном контроле перемещения в двух направлениях. Необходимое количество контрольных точек и соответственно необходимые дискретность, точность и диапазон измерения можно получить также увеличением количества строб-импульсов в течение одного периода напряжения на обмотке возбуждения. На фиг.1 приведен датчик механических перемещений: 1а - блок схема датчика; 16 первичный преобразователь с подвижным элементом; 1в - возможный вариант размещения первичных преобразователей и подвижных элементов, установленных на обьекте контроля (стрелкой показаны возможные направления движения объекта); на фиг.2 представлен график изменения амплитуды результирующего сигнала на выходе измерительных катушек первичного преобразователя. Датчик механических перемещений со держит (п) первичных преобразователей 1, каждый из которых выполнен в виде (фиг. 16) Ш-образного сердечника с размещенными на нем обмоткой возбуждения 2 и* двумя измерительными обмотками 3, подвижный элемент 4, установленный на объекте конт роля с возможностью перемещения относительно обмоток первичных преобразователей 1 и взаимодействия с их магнитным полем. Обмотка возбуждения 2 каждого из п первичных преобразователей 1 подключена к выходу тактового генератора 5, а измерительные обмотки 3 соединены встречно-последовательно, их выходы являются выходами п-го первичного преобразователя 1 и подключены ко входам соответствующего п-го интегратора б, выходы которого соединены с тактируемым дешифратором 7, тактовый вход которого подключен к выходу тактового генератора 5. В дешифраторе 7 имеется схема формирования строб-импульса из сигнала, поступающего на его тактовый вход. Датчик механических перемещений работает следующим образом. Сигнал с тактового генератора 5 (фиг. 1а) подается на обмотку возбуждения 2 каждого из (п) первичных преобразователей 1. В обмотках 3, расположенных на крайних стержнях Ш-образного сердечника индуцируется ЭДС. Поскольку измерительные обмотки 3 преобразователя 1 включены встречно-последовательно, сигнал на выходе каждого из п преобразователей 1 соответствует разности ЭДС, индуцируемых в его обмотках 3. При перемещении объекта контроля по 5723 движные элементы 4 изменяют магнитное поле в обмотках 3. При этом при движении элемента 4 над сердечником (фиг. 16) в сторону одной или другой обмотки 3 выходной сигнал преобразователя 1 изменяется по амплитуде от Ua до Um, а при переходе его через среднее положение (точка 0 - контрольная точка) - по фазе на 180° (фиг.2). Величина Ua зависит о технологических характеристик первичных преобразователей - количества витков катушек, уровня посадки катушек на сердечниках, однородности магнитного материала Ш-образных сердечников и т.д. От крутизны кривой, представленной на фиг.2, зависит точность датчика. Выходной сигнал с каждого из п преобразователей 1, фаза которого, в зависимости от направления перемещения подвижного элемента над Ш-образным сердечником, совпадает с фазой сигнала, подаваемого на обмотку возбуждения, или противоположна ей, подается на соответствующий n-ый ин-5 тегратор 6, который преобразует синусоидальную форму сигнала в форму, близкую к прямоугольной. По сигналам с интеграторов 6, при нали-10 чий строб-импульса, на выходах дешифратора 7 формируются сигнал "0" или "І". В момент изменения фазы сигнала на входе интегратора б на 180° и при наличии? строб-импульса происходит изменение уровня ло-15 гического сигнала на выходе дешифратора 7. Момент изменения фазы фиксирует прохождение подвижным элементом 4 контрольной точки на сердечнике преобразователя. направлени /Щ я движения б Фиг! 5723 Фиг. 2 Упорядник В.Лисенко Замовлення 621 Техред М.Моргентал Коректор Н.Король Тираж Підписне Державне патентне відомство України, 254655, ГСП, Київ-53, Львівська пл., 8 Виробничо-видавничий комбінат "Патент", м. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюIndicator of mechanical displacements
Автори англійськоюLysenko Valentyn Serhiiovych, Bohatyrenko Yevhenii Fedorovych, Pohyba Vikor Pavlovych
Назва патенту російськоюДатчик механических перемещений
Автори російськоюЛысенко Валентин Сергеевич, Богатыренко Евгений Федорович, Погиба Виктор Павлович
МПК / Мітки
МПК: G01B 7/00
Мітки: переміщень, механічних, датчик
Код посилання
<a href="https://ua.patents.su/4-5723-datchik-mekhanichnikh-peremishhen.html" target="_blank" rel="follow" title="База патентів України">Датчик механічних переміщень</a>
Диференційний індуктивний датчик переміщень
Номер патенту: 4143
Опубліковано: 27.12.1994
Автор: Нікітін Борис Михайлович
МПК: G01B 7/00
Мітки: індуктивний, диференційний, переміщень, датчик
Формула / Реферат:
Дифференциальный индуктивный датчик перемещений, содержащий якорь, охватывающий его сердечник и измерительный элемент, отличающийся тем, что, с целью повышения точности, якорь выполнен в виде прямоугольного диэлектрического бруса, разделенного по диагонали прямоугольным магнитопроводом, измерительный элемент выполнен в виде двух одинаковых одно-слойных индукторных катушек, размещенных в каркасах, каркасы установлены на противолежащих...
Індуктивний датчик лінійних переміщень

Номер патенту: 3418
Опубліковано: 27.12.1994
Автор: Нікітін Борис Михайлович
МПК: G01B 5/14
Мітки: датчик, індуктивний, переміщень, лінійних
Формула / Реферат:
Индуктивный датчик линейных перемeщений, содержащий корпус, смонтированные в нем соосные катушки индуктивностей, коаксиально установленный в них якорь, установленный в корпусе с помощью шарнира измерительный рычаг, один конец которого скреплен с якорем, закрепленный на другом конце измерительного рычага щуп и средство крепления на объекте контроля, отличающийся тем, что, с целью упрощения конструкции и повышения удобств при эксплуатации,...
Пристрій для вимірювання вібрації та переміщень
Номер патенту: 395
Опубліковано: 30.04.1993
Автори: Зорін Олександр Сергійович, Метельов Леонід Дмитрович, Меншиков Сергій Миколайович, Квашин Михайло Федорович, Вова Микола Іванович, Цибулько Вадим Йосипович
МПК: G01B 7/00, G01H 11/00
Мітки: вимірювання, вібрації, пристрій, переміщень
Формула / Реферат:
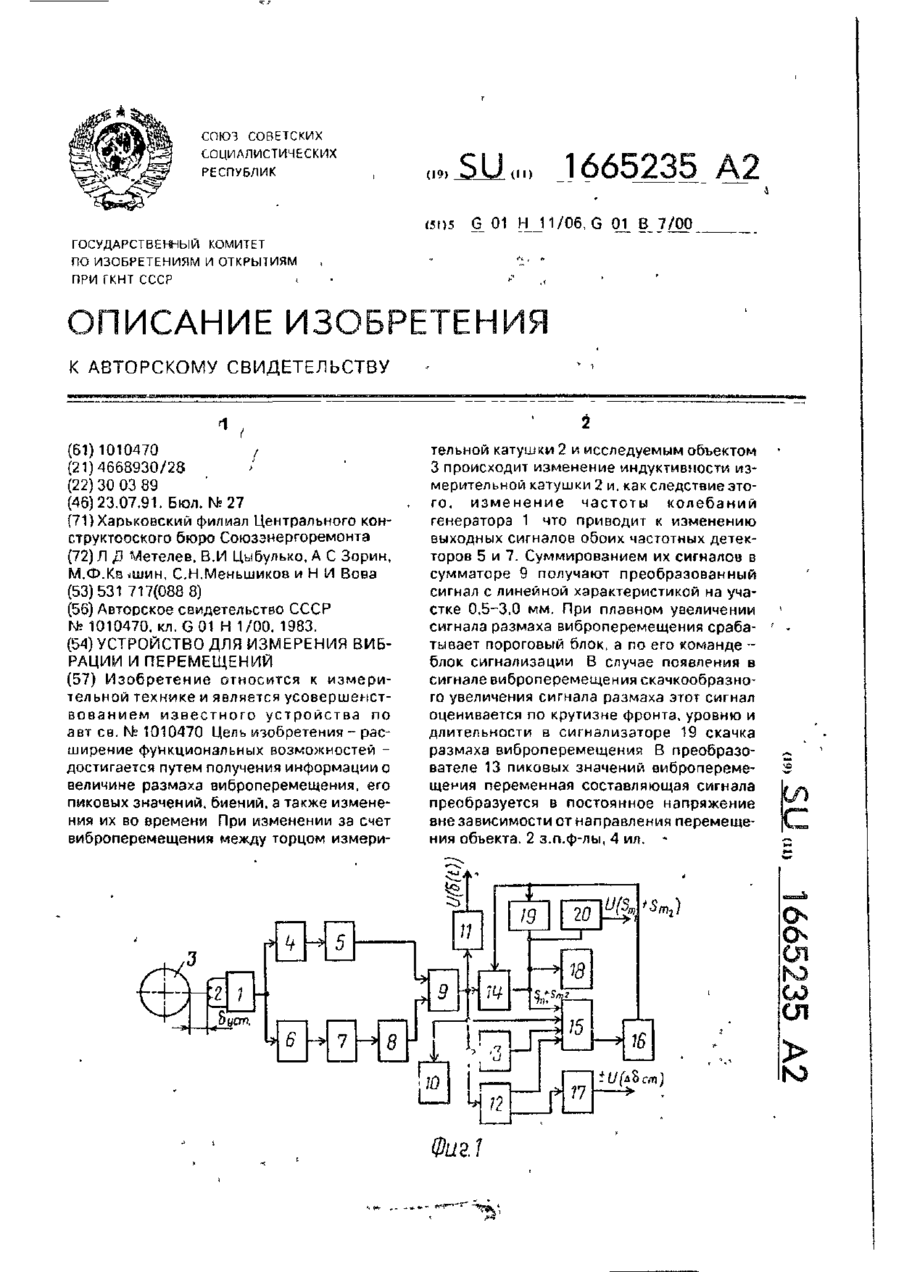
Формула изобретения1. Устройство для измерения вибрации и перемещений по авт. св. №1010470, отличающееся тем, что, с целью расширения функциональных возможностей за счет получения информации о величине размаха виброперемещения, его пиковых значениях, биениях, а также их изменении во времени, оно снабжено подключенными к выходу сумматора нормирующим блоком сигнала виброперемещения, преобразователем относительного статического...
Акустоелектронний спосіб визначення переміщень об’єкта
Номер патенту: 3040
Опубліковано: 26.12.1994
Автори: Жовнір Микола Федорович, Довгополий Анатолій Степанович, Скрипник Вікторія Іосифівна, Скрипник Юрій Олексійович
МПК: G01B 17/00
Мітки: визначення, об'єкта, спосіб, переміщень, акустоелектронний
Формула / Реферат:
Акустоэлектронный способ определения перемещений объекта, заключающийся в том, что в неподвижной пьезоэлектрической пластине излучающим встречно-штыревым преобразователем возбуждают поверхностную акустическую волну, принимают ее приемным встречно-штыревым преобразователем, установленным на подвижной пьезоэлектрической пластине, предназначенной для связи с перемещаемым объектом, измеряют разность фаз между принятым и опорным сигналами и...
Спосіб безконтактного вимірювання переміщень

Номер патенту: 356
Опубліковано: 30.04.1993
Автори: Меншиков Сергій Миколайович, Цибулько Вадим Йосипович, Маслій Володимир Миколайович, Метельов Леонід Дмитрович, Квашин Михайло Федорович, Росліков Олександр Фірсович, Зорін Олександр Сергійович
МПК: G01B 7/00
Мітки: безконтактного, вимірювання, спосіб, переміщень
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и яСпособ бесконтактного измерения перемещений, включающий преобразование параметров, вносимых токопроводящей поверхностью измеряемого объекта в катушку индуктивности автогенератора, в электрический сигнал, о т л и ч а ю щ и й с я тем, что, с целью повышения точности воспроизведения функциональной зависимости выходного сигнала от перемещения и расширения диапазона измерений, уменьшают чувствительность...
Попередній патент: Електронна система запалювання
Наступний патент: Пристрій для гемосорбції
Випадковий патент: Свердловинний магнітогідродинамічний активатор