Спосіб зчищення з поверхні льоду і ущільненого снігу та/або обробітку грунту
Номер патенту: 57954
Опубліковано: 15.07.2003
Автори: Погорельська Юля Станіславівна, Погорельський Станіслав Володимирович
Формула / Реферат
1. Спосіб зчищення з поверхні льоду і ущільненого снігу та/або обробітку грунту, згідно з яким робочі органи пристрою з нахиленими осями обертання, розташовані догори дном, переміщують відносно оброблюваного середовища, прикладаючи зусилля в напрямку проникнення робочих органів в середовище та переміщення відносно цього середовища, який відрізняється тим, що зусилля на робочий орган прикладають за допомогою важеля.
2. Пристрій для зчищення з поверхні льоду, ущільненого снігу та/або обробітку грунту, що містить робочі органи, які розташовані догори дном та мають можливість обертатися навколо нахилених осей, а в робочому стані є можливість прикласти до робочих органів зусилля (силу, сили, вантаж, вантажі), який відрізняється тим, що містить щонайменше один робочий орган, до якого є можливість прикласти результуюче зусилля (силу) від зусиль та/або вантажів та/або реакцій в напрямку заглиблення робочого органа в лід, або ущільнений сніг, або грунт, а місця, до яких прикладено складові зусилля, розташовані поза розташуванням щонайменше однієї пари робочих органів на плечах важеля пристрою.
3. Пристрій за п. 2, який відрізняється тим, що центр обертання важеля розташований на вертикалі зони робочого органа.
4. Пристрій за п. 2, який відрізняється тим, що на одному плечі важеля пристрою розташовано вантаж або забезпечено зв'язок, який зумовлює реакцію сили на плече, а друге плече розташоване під кутом до напрямку зв'язку плеча з приводом.
5. Пристрій за п. 4, який відрізняється тим, що плече для вантажу має зв'язок з приводом.
6. Пристрій за п. 2, який відрізняється тим, що на плечах важеля розташовано вантаж або є зв'язок, який забезпечує реакцію сили, а важіль має зв’язок з приводом.
7. Пристрій за п. 2, який відрізняється тим, що важіль складають два плеча та корпус пристрою.
8. Пристрій за п. 2, який відрізняється тим, що має з приводом кінематичний зв'язок, який розташовано на пристрої попереду відносно робочого органа за напрямком передбачуваного руху робочого органа.
9. Пристрій за п. 2, який відрізняється тим, що має з приводом кінематичний зв’язок, який розташовано на пристрої позаду відносно робочого органа за напрямком передбачуваного руху робочого органа.
10. Пристрій за п. 2, який відрізняється тим, що робочі органи розташовані в рамі з можливістю переміщуватися в рамі відносно рами вверх та вниз.
11. Пристрій за п. 10, який відрізняється тим, що на рамі встановлено вантаж.
12. Пристрій за п. 2, який відрізняється тим, що плечі важеля розташовані під кутом одне до одного.
13. Пристрій за п. 2, який відрізняється тим, що плече важеля жорстко з’єднане з вантажем або з елементом (трактором), від якого важіль може отримати зусилля реакції.
14. Пристрій за п. 2, який відрізняється тим, що плече для вантажу розташоване вільно відносно вантажу (без жорсткого кріплення) та або з елементом (трактором), від якого важіль може отримати зусилля реакції (наприклад вільно упиратися під бампер).
15. Пристрій за п. 2, який відрізняється тим, що вісь обертання робочого органа розташовано поперек рухові робочого органа.
16. Пристрій за п. 2, який відрізняється тим, що перша пара робочих органів має меншу відстань між собою, ніж ті, що розташовані слідом.
17. Пристрій за п. 2, який відрізняється тим, що пари робочих органів, розташованих слідом, мають меншу відстань між собою, ніж ті, що розташовані попереду.
18. Пристрій за п. 2, який відрізняється тим, що привід має кінематичний зв'язок з пристроєм між робочими органами.
19. Пристрій за п. 2, який відрізняється тим, що зв'язок плеча важеля з приводом або вантажем в робочому стані може спричинити наявність в важелі моменту сил, вектор якого співпадає з вектором обертання робочого органа.
20. Пристрій за п. 2, який відрізняється тим, що пристрій зі співпадаючими векторами моментів сил та обертання робочих органів встановлено попереду приводу (трактора).
21. Пристрій за п. 2, який відрізняється тим, що зв'язок плеча важеля з приводом або вантажем в робочому стані може спричинити наявність у важелі моменту сил, вектор якого протилежний вектору обертання робочого органа.
22. Пристрій за п. 2, який відрізняється тим, що центр обертання важеля розташований на вертикалі зони робочого органа.
Текст
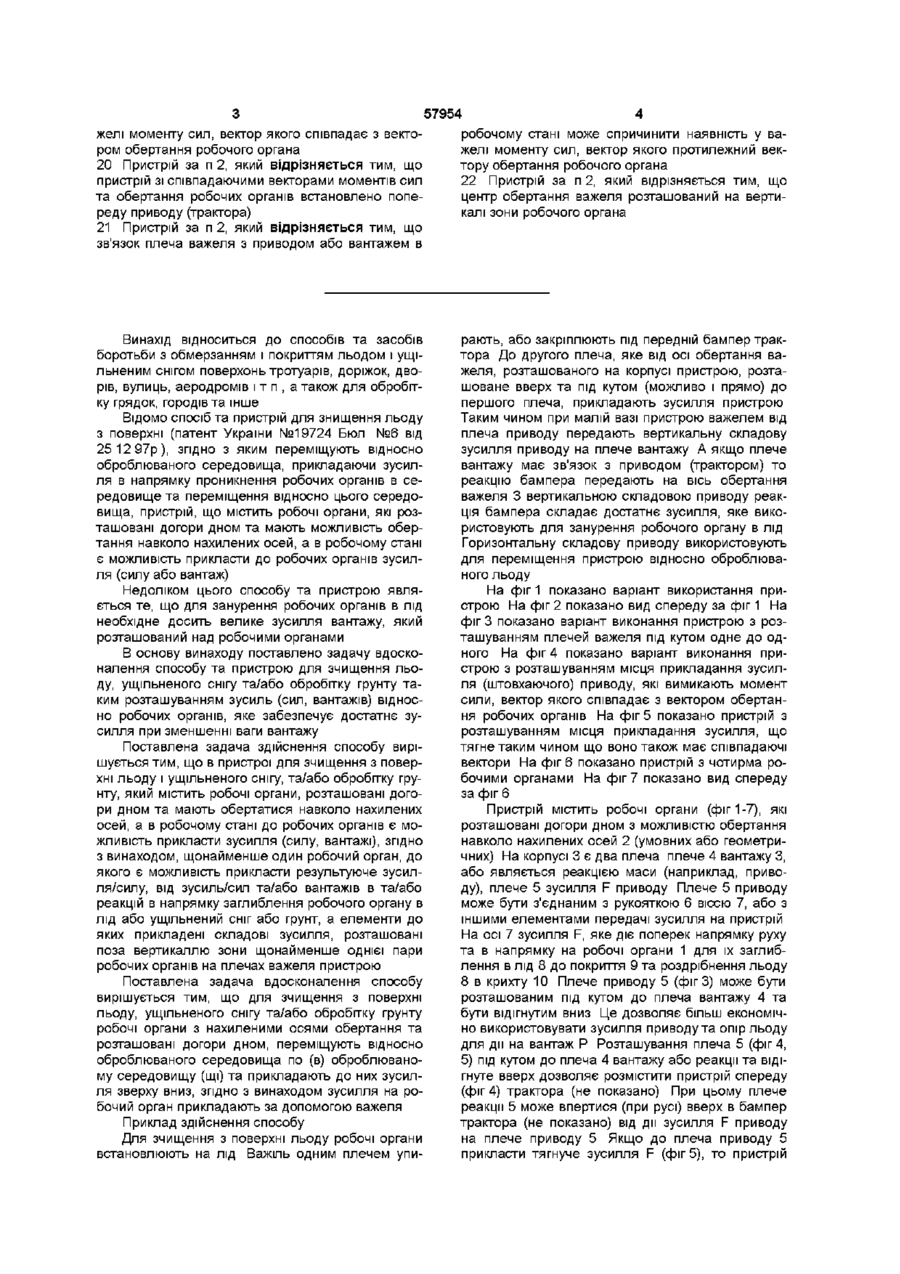
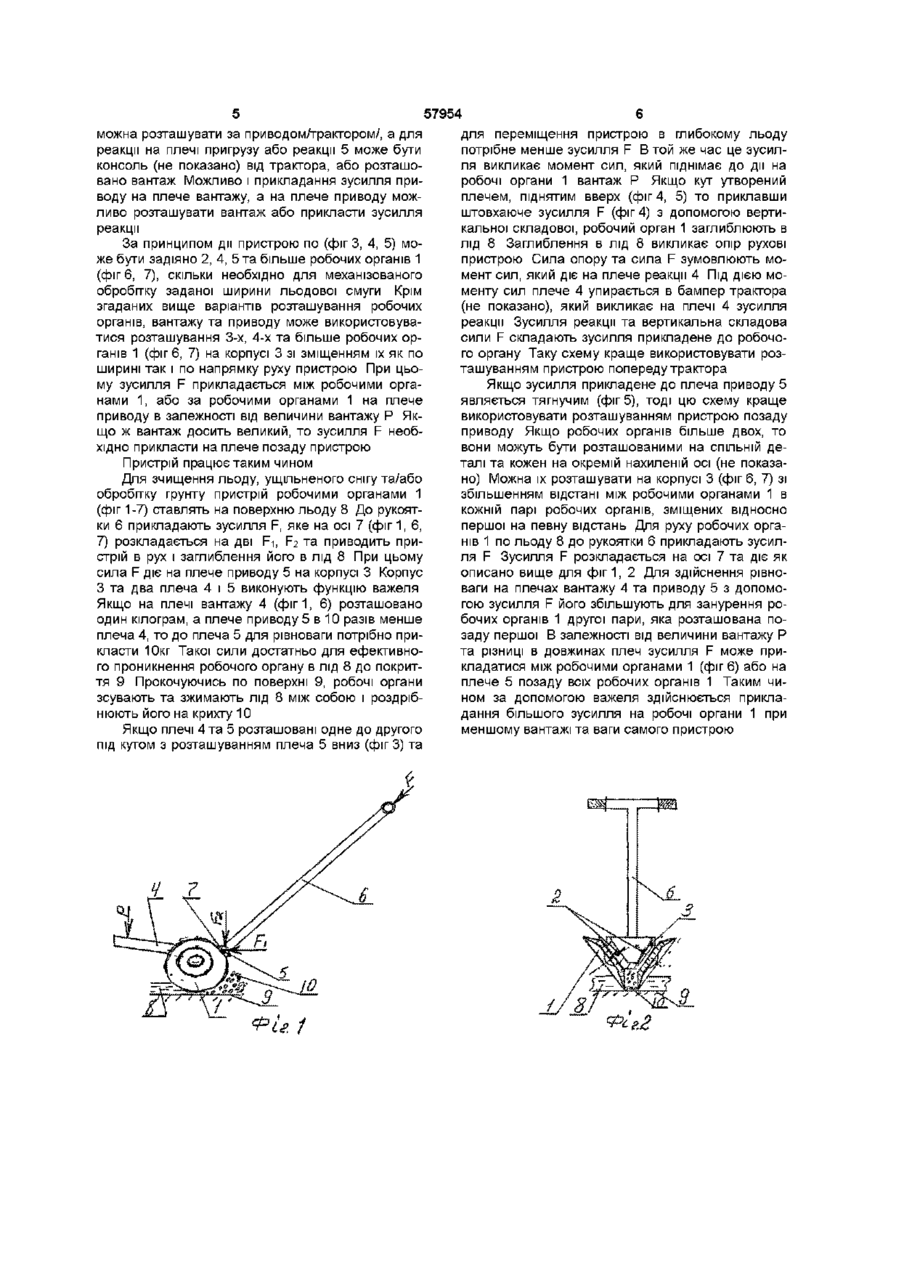
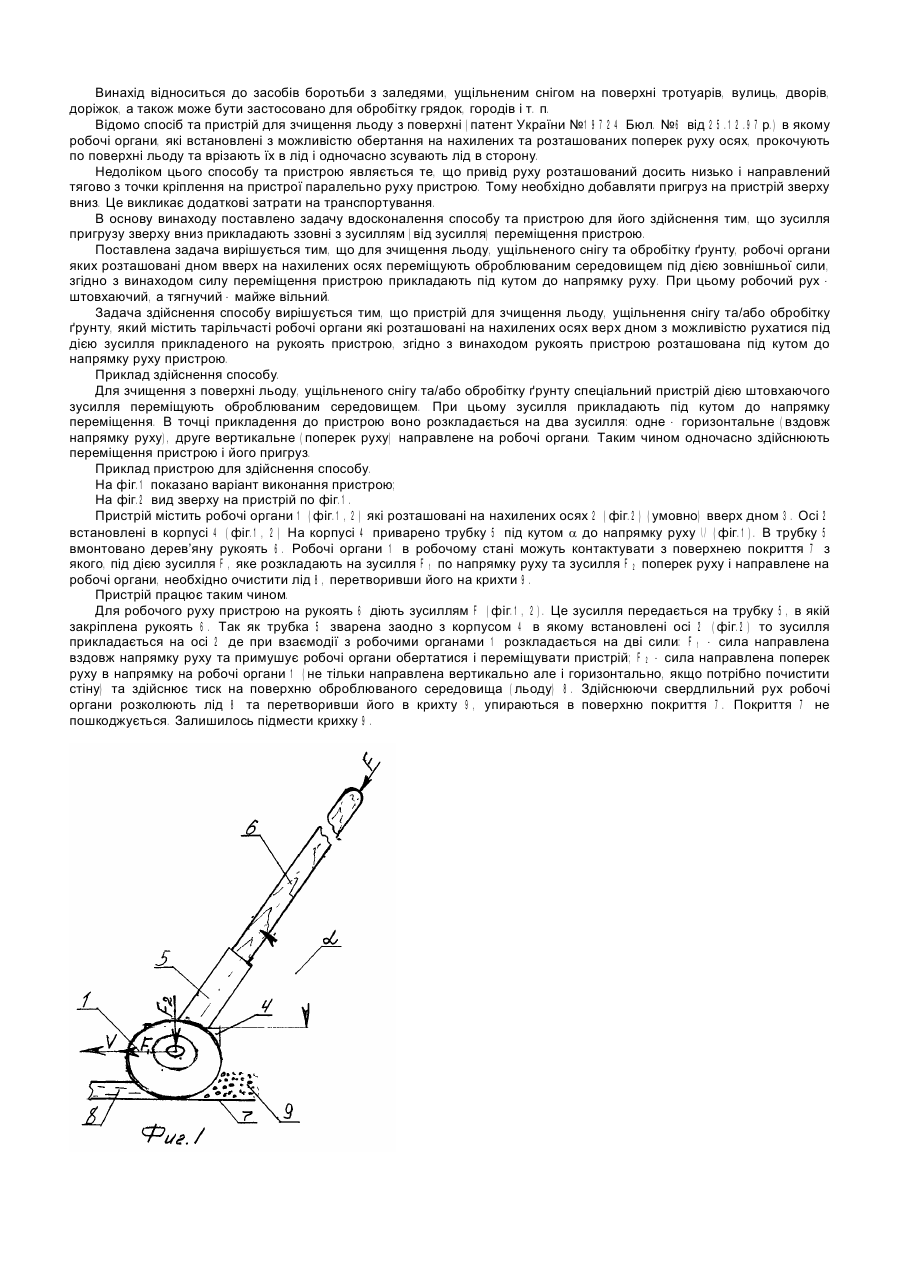
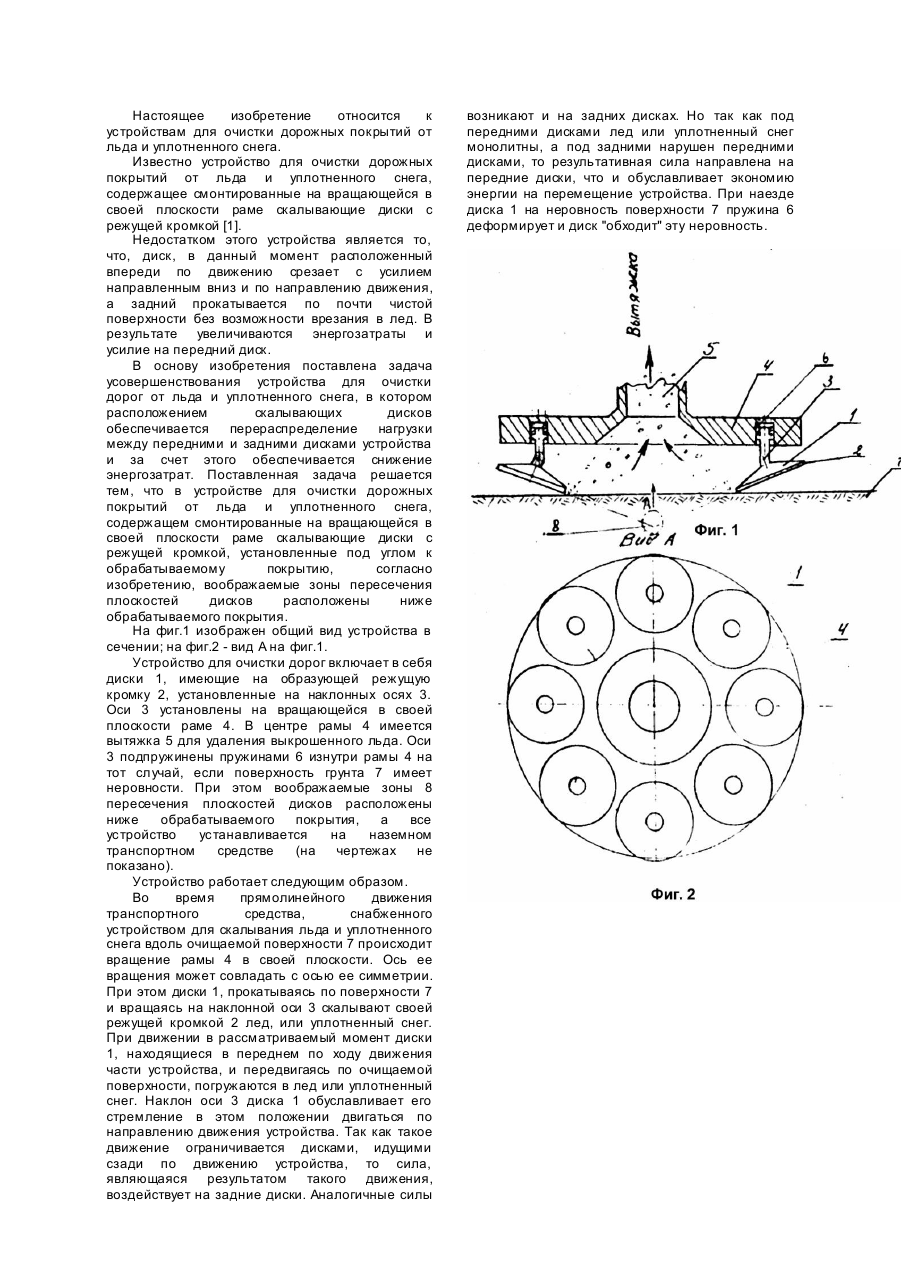
1 Спосіб зчищення з поверхні льоду і ущільненого снігу та/або обробітку грунту, згідно з яким робочі органи пристрою з нахиленими осями обертання, розташовані догори дном, переміщують відносно оброблюваного середовища, прикладаючи зусилля в напрямку проникнення робочих органів в середовище та переміщення відносно цього середовища, який відрізняється тим, що зусилля на робочий орган прикладають за допомогою важеля 2 Пристрій для зчищення з поверхні льоду, ущільненого снігу та/або обробітку грунту, що містить робочі органи, які розташовані догори дном та мають можливість обертатися навколо нахилених осей, а в робочому стані є можливість прикласти до робочих органів зусилля (силу, сили, вантаж, вантажі), який відрізняється тим, що містить щонайменше один робочий орган, до якого є можливість прикласти результуюче зусилля (силу) від зусиль та/або вантажів та/або реакцій в напрямку заглиблення робочого органа в лід, або ущільнений сніг, або грунт, а місця, до яких прикладено складові зусилля, розташовані поза розташуванням щонайменше однієї пари робочих органів на плечах важеля пристрою 3 Пристрій за п 2, який відрізняється тим, що центр обертання важеля розташований на вертикалі зони робочого органа 4 Пристрій за п 2, який відрізняється тим, що на одному плечі важеля пристрою розташовано вантаж або забезпечено зв'язок, який зумовлює реакцію сили на плече, а друге плече розташоване під кутом до напрямку зв'язку плеча з приводом 5 Пристрій за п 4, який відрізняється тим, що плече для вантажу має зв'язок з приводом 6 Пристрій за п 2, який відрізняється тим, що на плечах важеля розташовано вантаж або є зв'язок, який забезпечує реакцію сили, а важіль має зв'язок з приводом 7 Пристрій за п 2, який відрізняється тим, що важіль складають два плеча та корпус пристрою 8 Пристрій за п 2, який відрізняється тим, що має з приводом кінематичний зв'язок, який розташовано на пристрої попереду відносно робочого органа за напрямком передбачуваного руху робочого органа 9 Пристрій за п 2, який відрізняється тим, що має з приводом кінематичний зв'язок, який розташовано на пристрої позаду відносно робочого органа за напрямком передбачуваного руху робочого органа 10 Пристрій за п 2, який відрізняється тим, що робочі органи розташовані в рамі з можливістю переміщуватися в рамі відносно рами вверх та вниз 11 Пристрій за п 10, який відрізняється тим, що на рамі встановлено вантаж 12 Пристрій за п 2, який відрізняється тим, що плечі важеля розташовані під кутом одне до одного 13 Пристрій за п 2, який відрізняється тим, що плече важеля жорстко з'єднане з вантажем або з елементом (трактором), від якого важіль може отримати зусилля реакції 14 Пристрій за п 2, який відрізняється тим, що плече для вантажу розташоване вільно відносно вантажу (без жорсткого кріплення) та або з елементом (трактором), від якого важіль може отримати зусилля реакції (наприклад вільно упиратися під бампер) 15 Пристрій за п 2, який відрізняється тим, що вісь обертання робочого органа розташовано поперек рухові робочого органа 16 Пристрій за п 2, який відрізняється тим, що перша пара робочих органів має меншу відстань між собою, ніж ті, що розташовані слідом 17 Пристрій за п 2, який відрізняється тим, що пари робочих органів, розташованих слідом, мають меншу відстань між собою, ніж ті, що розташовані попереду 18 Пристрій за п 2, який відрізняється тим, що привід має кінематичний зв'язок з пристроєм між робочими органами 19 Пристрій за п 2, який відрізняється тим, що зв'язок плеча важеля з приводом або вантажем в робочому стані може спричинити наявність в ва ю ю 57954 желі моменту сил, вектор якого співпадає з вектором обертання робочого органа 20 Пристрій за п 2, який відрізняється тим, що пристрій зі співпадаючими векторами моментів сил та обертання робочих органів встановлено попереду приводу (трактора) 21 Пристрій за п 2, який відрізняється тим, що зв'язок плеча важеля з приводом або вантажем в робочому стані може спричинити наявність у важелі моменту сил, вектор якого протилежний вектору обертання робочого органа 22 Пристрій за п 2, який відрізняється тим, що центр обертання важеля розташований на вертикалі зони робочого органа Винахід відноситься до способів та засобів боротьби з обмерзанням і покриттям льодом і ущільненим снігом поверхонь тротуарів, доріжок, дворів, вулиць, аеродромів і т п , а також для обробітку грядок, городів та інше Відомо спосіб та пристрій для знищення льоду з поверхні (патент України №19724 Бюл №6 від 25 12 97р), згідно з яким переміщують відносно оброблюваного середовища, прикладаючи зусилля в напрямку проникнення робочих органів в середовище та переміщення відносно цього середовища, пристрій, що містить робочі органи, які розташовані догори дном та мають можливість обертання навколо нахилених осей, а в робочому стані є можливість прикласти до робочих органів зусилля (силу або вантаж) Недоліком цього способу та пристрою являється те, що для занурення робочих органів в лід необхідне досить велике зусилля вантажу, який розташований над робочими органами В основу винаходу поставлено задачу вдосконалення способу та пристрою для зчищення льоду, ущільненого снігу та/або обробітку грунту таким розташуванням зусиль (сил, вантажів) відносно робочих органів, яке забезпечує достатнє зусилля при зменшенні ваги вантажу Поставлена задача здійснення способу вирішується тим, що в пристрої для зчищення з поверхні льоду і ущільненого снігу, та/або обробітку грунту, який містить робочі органи, розташовані догори дном та мають обертатися навколо нахилених осей, а в робочому стані до робочих органів є можливість прикласти зусилля (силу, вантажі), згідно з винаходом, щонайменше один робочий орган, до якого є можливість прикласти результуюче зусилля/силу, від зусиль/сил та/або вантажів в та/або реакцій в напрямку заглиблення робочого органу в лід або ущільнений сніг або грунт, а елементи до яких прикладені складові зусилля, розташовані поза вертикаллю зони щонайменше однієї пари робочих органів на плечах важеля пристрою рають, або закріплюють під передній бампер трактора До другого плеча, яке від осі обертання важеля, розташованого на корпусі пристрою, розташоване вверх та під кутом (можливо і прямо) до першого плеча, прикладають зусилля пристрою Таким чином при малій вазі пристрою важелем від плеча приводу передають вертикальну складову зусилля приводу на плече вантажу А якщо плече вантажу має зв'язок з приводом (трактором) то реакцію бампера передають на вісь обертання важеля 3 вертикальною складовою приводу реакція бампера складає достатнє зусилля, яке використовують для занурення робочого органу в лід Горизонтальну складову приводу використовують для переміщення пристрою відносно оброблюваного льоду Поставлена задача вдосконалення способу вирішується тим, що для зчищення з поверхні льоду, ущільненого снігу та/або обробітку грунту робочі органи з нахиленими осями обертання та розташовані догори дном, переміщують відносно оброблюваного середовища по (в) оброблюваному середовищу (щі) та прикладають до них зусилля зверху вниз, згідно з винаходом зусилля на робочий орган прикладають за допомогою важеля Приклад здійснення способу Для зчищення з поверхні льоду робочі органи встановлюють на лід Важіль одним плечем упи На фіг 1 показано варіант використання пристрою На фіг 2 показано вид спереду за фіг 1 На фіг 3 показано варіант виконання пристрою з розташуванням плечей важеля під кутом одне до одного На фіг 4 показано варіант виконання пристрою з розташуванням місця прикладання зусилля (штовхаючого) приводу, які вимикають момент сили, вектор якого співпадає з вектором обертання робочих органів На фіг 5 показано пристрій з розташуванням місця прикладання зусилля, що тягне таким чином що воно також має співпадаючі вектори На фіг 6 показано пристрій з чотирма робочими органами На фіг 7 показано вид спереду за фіг 6 Пристрій містить робочі органи (фіг 1-7), які розташовані догори дном з можливістю обертання навколо нахилених осей 2 (умовних або геометричних) На корпусі 3 є два плеча плече 4 вантажу З, або являється реакцією маси (наприклад, приводу), плече 5 зусилля F приводу Плече 5 приводу може бути з'єднаним з рукояткою 6 віссю 7, або з іншими елементами передачі зусилля на пристрій На осі 7 зусилля F, яке діє поперек напрямку руху та в напрямку на робочі органи 1 для їх заглиблення в лід 8 до покриття 9 та роздрібнення льоду 8 в крихту 10 Плече приводу 5 (фіг 3) може бути розташованим під кутом до плеча вантажу 4 та бути відігнутим вниз Це дозволяє більш економічно використовувати зусилля приводу та опір льоду для дії на вантаж Р Розташування плеча 5 (фіг 4, 5) під кутом до плеча 4 вантажу або реакції та відігнуте вверх дозволяє розмістити пристрій спереду (фіг 4) трактора (не показано) При цьому плече реакції 5 може впертися (при русі) вверх в бампер трактора (не показано) від дії зусилля F приводу на плече приводу 5 Якщо до плеча приводу 5 прикласти тягнуче зусилля F (фіг 5), то пристрій 57954 можна розташувати за приводомл'рактором/, а для реакції на плечі пригрузу або реакції 5 може бути консоль (не показано) від трактора, або розташовано вантаж Можливо і прикладання зусилля приводу на плече вантажу, а на плече приводу можливо розташувати вантаж або прикласти зусилля реакції За принципом дії пристрою по (фіг 3, 4, 5) може бути задіяно 2, 4, 5 та більше робочих органів 1 (фіг 6, 7), скільки необхідно для механізованого обробітку заданої ширини льодової смуги Крім згаданих вище варіантів розташування робочих органів, вантажу та приводу може використовуватися розташування 3-х, 4-х та більше робочих органів 1 (фіг 6, 7) на корпусі 3 зі зміщенням їх як по ширині так і по напрямку руху пристрою При цьому зусилля F прикладається між робочими органами 1, або за робочими органами 1 на плече приводу в залежності від величини вантажу Р Якщо ж вантаж досить великий, то зусилля F необхідно прикласти на плече позаду пристрою Пристрій працює таким чином Для зчищення льоду, ущільненого снігу та/або обробітку грунту пристрій робочими органами 1 (фіг 1-7) ставлять на поверхню льоду 8 До рукоятки 6 прикладають зусилля F, яке на осі 7 (фіг 1, 6, 7) розкладається на дві F-i, F2 та приводить пристрій в рух і заглиблення його в лід 8 При цьому сила F діє на плече приводу 5 на корпусі 3 Корпус З та два плеча 4 і 5 виконують функцію важеля Якщо на плечі вантажу 4 (фиг 1, 6) розташовано один кілограм, а плече приводу 5 в 10 разів менше плеча 4, то до плеча 5 для рівноваги потрібно прикласти 10кг Такої сили достатньо для ефективного проникнення робочого органу в лід 8 до покриття 9 Прокочуючись по поверхні 9, робочі органи зсувають та зжимають лід 8 між собою і роздрібнюють його на крихту 10 Якщо плечі 4 та 5 розташовані одне до другого під кутом з розташуванням плеча 5 вниз (фіг 3) та ч Я для переміщення пристрою в глибокому льоду потрібне менше зусилля F В той же час це зусилля викликає момент сил, який піднімає до дії на робочі органи 1 вантаж Р Якщо кут утворений плечем, піднятим вверх (фіг 4, 5) то приклавши штовхаюче зусилля F (фіг 4) з допомогою вертикальної складової, робочий орган 1 заглиблюють в лід 8 Заглиблення в лід 8 викликає опір рухові пристрою Сила опору та сила F зумовлюють момент сил, який діє на плече реакції 4 Під дією моменту сил плече 4 упирається в бампер трактора (не показано), який викликає на плечі 4 зусилля реакції Зусилля реакції та вертикальна складова сили F складають зусилля прикладене до робочого органу Таку схему краще використовувати розташуванням пристрою попереду трактора Якщо зусилля прикладене до плеча приводу 5 являється тягнучим (фіг 5), тоді цю схему краще використовувати розташуванням пристрою позаду приводу Якщо робочих органів більше двох, то вони можуть бути розташованими на СПІЛЬНІЙ деталі та кожен на окремій нахиленій осі (не показано) Можна їх розташувати на корпусі 3 (фіг 6, 7) зі збільшенням відстані між робочими органами 1 в кожній парі робочих органів, зміщених відносно першої на певну відстань Для руху робочих органів 1 по льоду 8 до рукоятки 6 прикладають зусилля F Зусилля F розкладається на осі 7 та діє як описано вище для фіг1, 2 Для здійснення рівноваги на плечах вантажу 4 та приводу 5 з допомогою зусилля F його збільшують для занурення робочих органів 1 другої пари, яка розташована позаду першої В залежності від величини вантажу Р та різниці в довжинах плеч зусилля F може прикладатися між робочими органами 1 (фіг 6) або на плече 5 позаду всіх робочих органів 1 Таким чином за допомогою важеля здійснюється прикладання більшого зусилля на робочі органи 1 при меншому вантажі та ваги самого пристрою 57954 a 0. / s s / s Комп'ютерна верстка Е Гапоненко Підписано до друку 05 08 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for cleaning from surface ice and compacted snow and / or soil treatment
Автори англійськоюPogorelskyi Stanislav Volodymyrovych
Назва патенту російськоюСпособ счистки с поверхности льда и уплотненного снега и / или обработки грунта
Автори російськоюПогорельский Станислав Владимирович
МПК / Мітки
МПК: E01H 5/12
Мітки: поверхні, снігу, зчищення, грунту, обробітку, льоду, спосіб, ущільненого
Код посилання
<a href="https://ua.patents.su/4-57954-sposib-zchishhennya-z-poverkhni-lodu-i-ushhilnenogo-snigu-ta-abo-obrobitku-gruntu.html" target="_blank" rel="follow" title="База патентів України">Спосіб зчищення з поверхні льоду і ущільненого снігу та/або обробітку грунту</a>
Спосіб зчищення з поверхні льоду, ущільненого снігу та/або обробки грунту та пристрій для його здійснення
Номер патенту: 56391
Опубліковано: 15.05.2003
Автор: Погорельський Станіслав Володимирович
МПК: E01H 5/12
Мітки: зчищення, спосіб, обробки, ущільненого, здійснення, снігу, пристрій, поверхні, грунту, льоду
Формула / Реферат:
1. Спосіб зчищення льоду, ущільненого снігу та/або обробки ґрунту, згідно з яким робочі органи, які розташовані догори дном на нахилених осях, переміщують оброблюваним середовищем під дією сили, який відрізняється тим, що силу прикладають під кутом до напрямку руху пристрою.2. Спосіб зчищення льоду, ущільненого снігу та/або обробки ґрунту по п. 1, який відрізняється тим, що робочий рух пристрою здійснюють при штовхальному напрямку дії...
Пристрій для очистки поверхні від льоду, ущільненого снігу та/або обробітку грунту
Номер патенту: 1305
Опубліковано: 15.07.2002
Автор: Погорельський Станіслав Володимирович
МПК: A01B 21/08
Мітки: поверхні, пристрій, льоду, ущільненого, обробітку, снігу, очистки, грунту
Формула / Реферат:
Пристрій для очистки поверхні від льоду, ущільненого снігу та/або обробітку грунту, який містить робочі органи, встановлені з можливістю обертання навколо геометричних осей робочих органів, розташованих з нахилом та переважно поперек руху робочих органів, який відрізняється тим, що робочі органи розташовані зі зміщенням один відносно іншого поперек руху та вздовж напрямку руху.
Пристрій для сколювання льоду і ущільненого снігу
Номер патенту: 19724
Опубліковано: 25.12.1997
Автор: Погорельський Станіслав Володимирович
МПК: E01H 5/12
Мітки: льоду, снігу, пристрій, сколювання, ущільненого
Формула / Реферат:
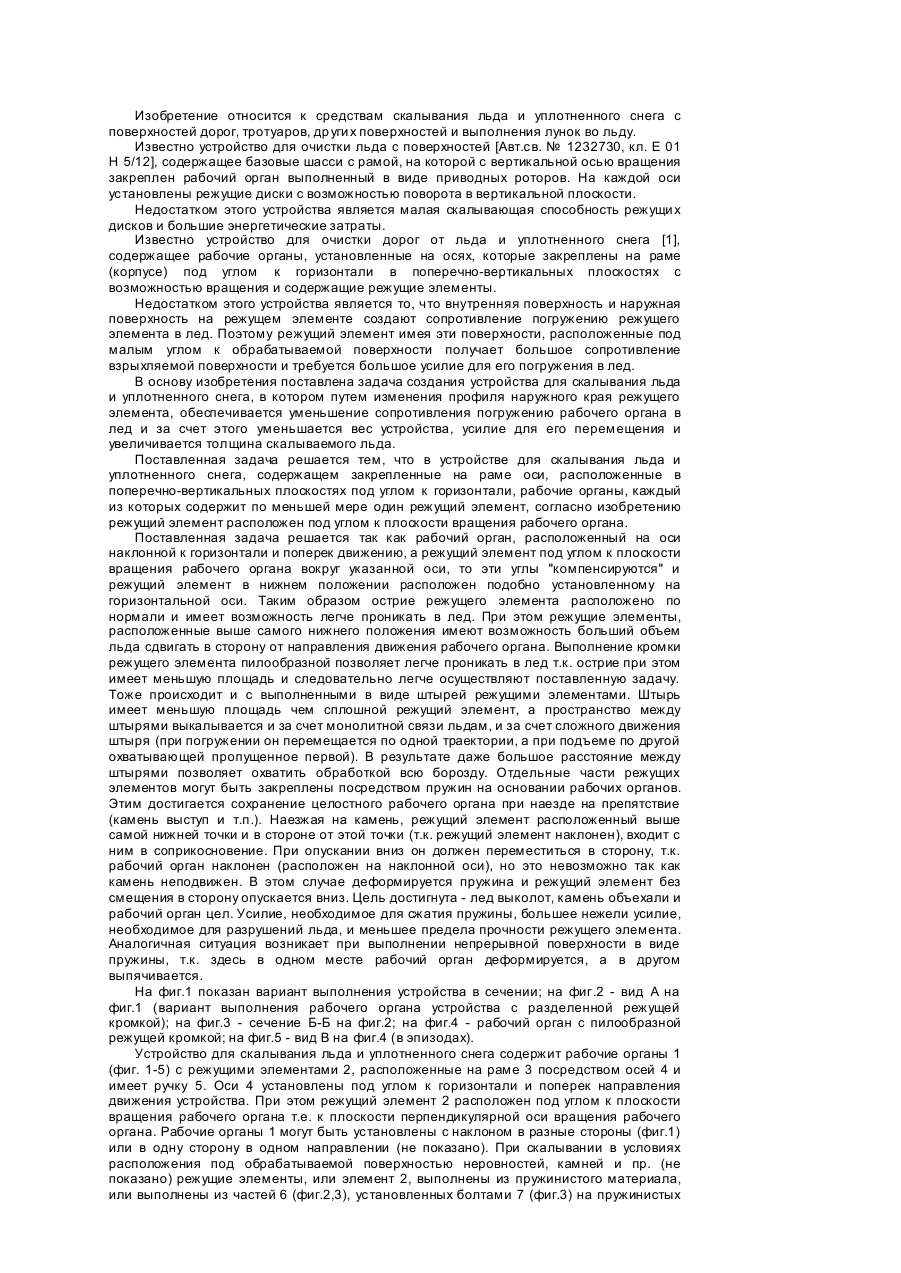
1. Устройство для скалывания льда и уплотненного снега, содержащее закрепленные на раме оси, расположенные в поперечно-вертикальных плоскостях под углом к горизонтали, на которых установлены рабочие органы, каждый из которых содержит по меньшей мере, один режущий элемент, отличающееся тем, что режущий элемент расположен под углом к плоскости вращения рабочего органа.2, Устройство по п.1, отличающееся тем, что каждый из указанных...
Пристрій для очищення доріг від льоду та ущільненого снігу
Номер патенту: 16800
Опубліковано: 29.08.1997
Автор: Погорельський Станіслав Володимирович
МПК: E01H 5/12
Мітки: очищення, ущільненого, льоду, доріг, пристрій, снігу
Формула / Реферат:
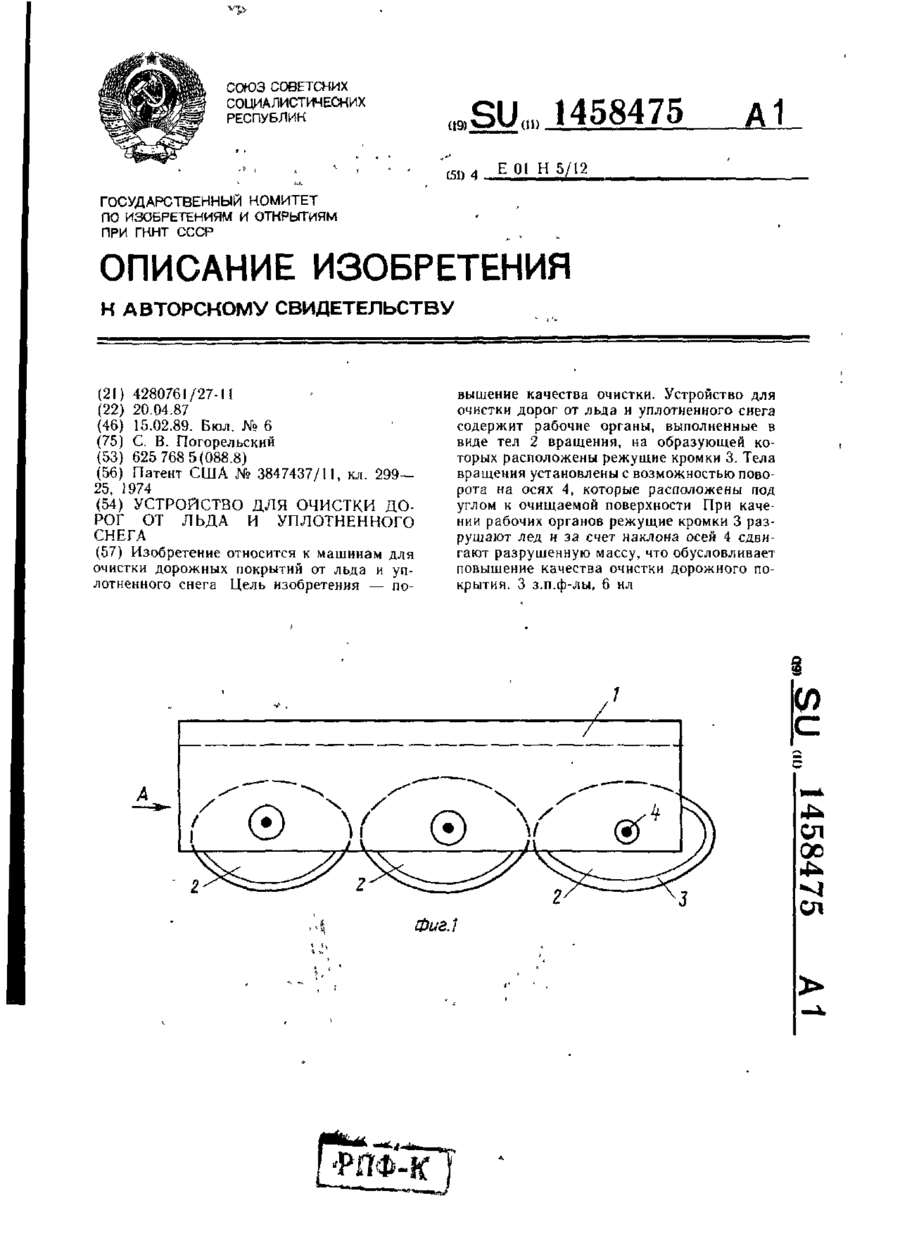
1. Устройство для очистки дорог от льда и уплотненного снега, содержащее рабочие органы, выполненные в виде тел вращения с режущей кромкой на образующей, установленных с возможностью поворота вокруг осей, лежащих в поперечной вертикальной плоскости, отличающееся тем, что, с целью повышения качества очистки, оси тел вращения расположены под углом к горизонтали.2. Устройство по п. 1, отличающееся тем, что тела вращения выполнены в виде...
Пристрій для очищення шляхових покриттів від льоду та ущільненого снігу
Номер патенту: 18480
Опубліковано: 25.12.1997
Автор: Погорельський Станіслав Володимирович
МПК: E01H 5/12
Мітки: покриттів, снігу, пристрій, льоду, шляхових, ущільненого, очищення
Формула / Реферат:
Устройство для очистки дорожных покрытий от льда и уплотненного снега, содержащее смонтированные на на вращающейся в своей плоскости раме скалывающие диски с режущей кромкой, установленные с возможностью перемещения вдоль оси вращения под углом к обрабатываемому покрытию, отличающееся тем, что воображаемые зоны пересечения плоскостей дисков расположены ниже обрабатываемого покрытия.
Попередній патент: Спосіб тонкої очистки коксового газу від оксидів азоту (іі)
Наступний патент: Механічний фільтр
Випадковий патент: Різьбове з'єднання