Ваговимірювальна система
Номер патенту: 58098
Опубліковано: 25.03.2011
Формула / Реферат
Ваговимірювальна система, що містить бункер і похилий вимірювальний лоток прямокутної форми перерізу, зв'язаний шарнірними з'єднаннями з трьома тензорезистивними датчиками сили, стрічковий конвеєр з електроприводом, встановлений під бункером, датчик швидкості руху стрічки, датчик температури, датчик розтягування стрічки, датчик вологості матеріалу, що розташований у бункері, кінцеві вимикачі, закріплені на конвеєрі, три аналого-цифрові перетворювачі, які підключені до мікропроцесора, з'єднаного із блоком індикації, функціональною клавіатурою, адресним дешифратором, накопичувачем пам'яті, оперативним запам'ятовувальним пристроєм, регістром адреси, цифро-аналоговим перетворювачем, підключеним до електроприводу й електровібратора, що розташований в бункері, а тензорезистивні датчики сили з'єднані з аналого-цифровими перетворювачами, яка відрізняється тим, що до її складу введені дозатор, що розташований у бункері, та електропривід вимірювального лотка, які через цифро-аналоговий перетворювач підключені до мікропроцесора.
Текст
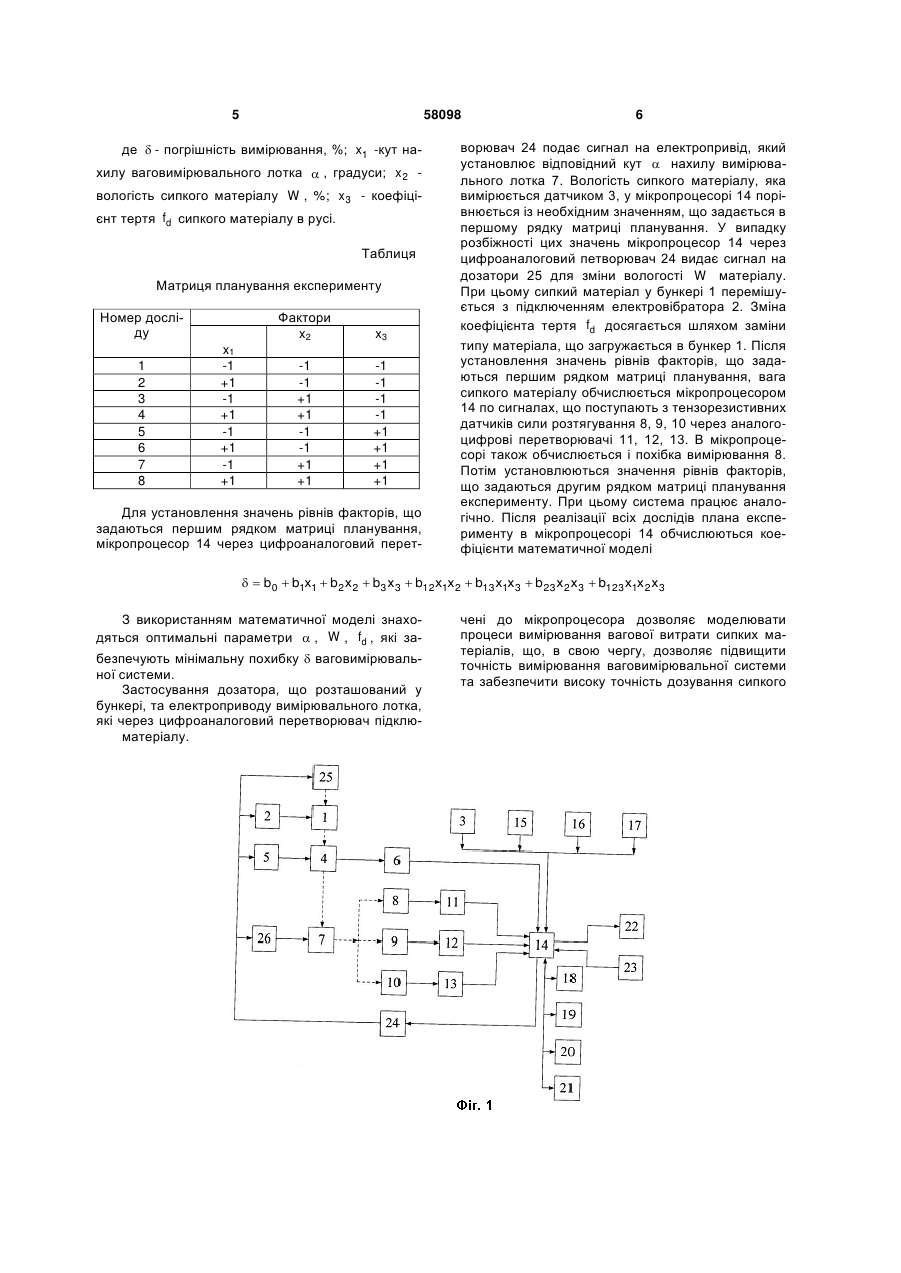
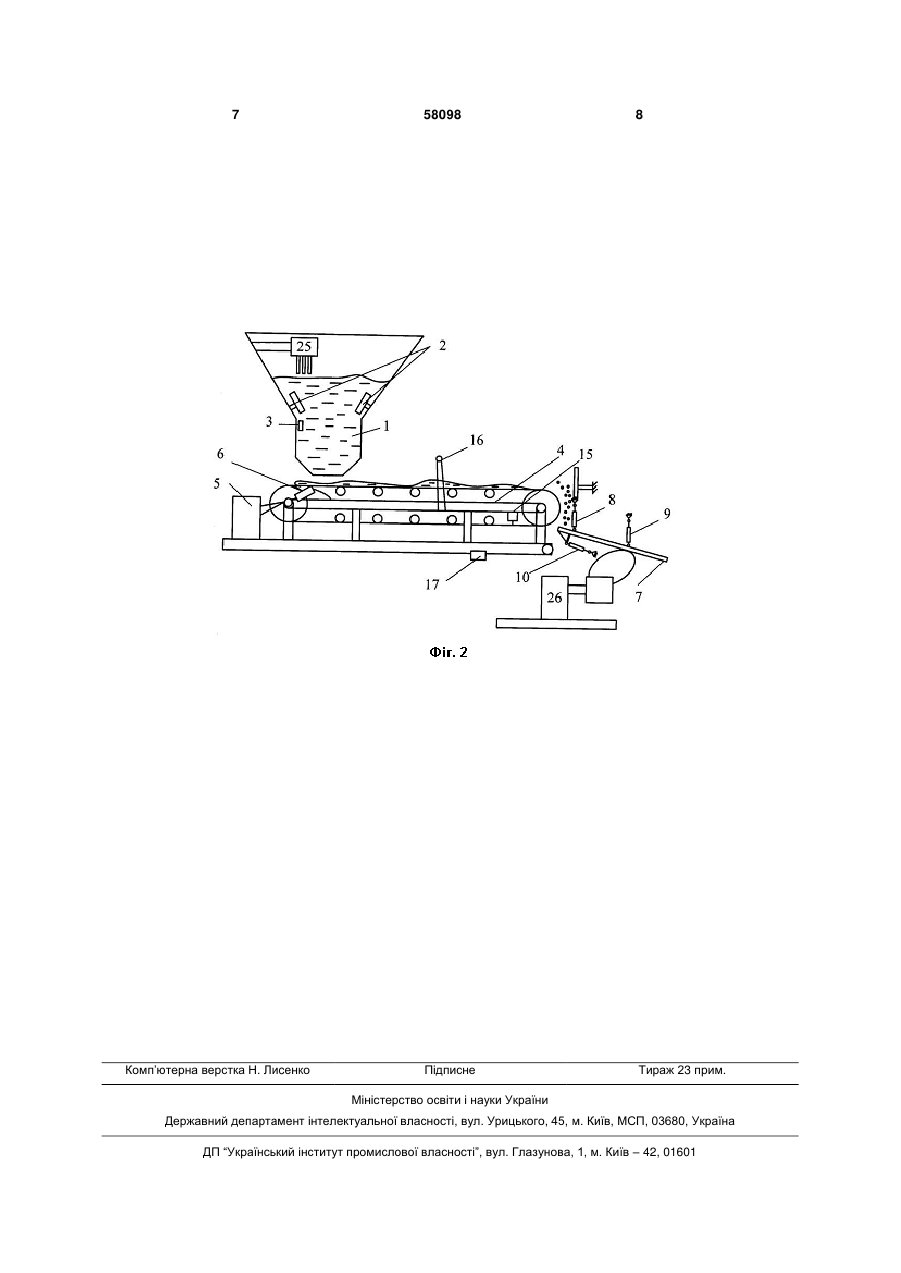
Ваговимірювальна система, що містить бункер і похилий вимірювальний лоток прямокутної форми перерізу, зв'язаний шарнірними з'єднаннями з трьома тензорезистивними датчиками сили, стрічковий конвеєр з електроприводом, встановлений під бункером, датчик швидкості руху стрічки, датчик температури, датчик розтягування стрічки, 3 Недоліком цієї системи являється неможливість моделювання процесів вимірювання вагової витрати сипких матеріалів. В основу корисної моделі поставлено технічну задачу забезпечення можливості моделювання процесів вимірювання вагової витрати сипких матеріалів та підвищення точності вимірювання. Для досягнення визначеної мети у ваговимірювальну систему, що містить бункер і похилий вимірювальний лоток прямокутної форми перерізу, зв'язаний шарнірними з'єднаннями з трьома тензорезистивними датчиками сили, стрічковий конвеєр з електроприводом, установлений під бункером, датчик швидкості руху стрічки, датчик температури, датчик розтягування стрічки, датчик вологості матеріалу, що розташований у бункері, кінцеві вимикачі, закріплені на конвеєрі, три аналого-цифрові перетворювачі, які підключені до мікропроцесора, з'єднаного із блоком індикації, функціональною клавіатурою, адресним дешифратором, накопичувачем пам'яті, оперативним запам'ятовувальним пристроєм, регістром адреси, цифроаналоговим перетворювачем, підключеним до електроприводу й електровібратора, що розташований в бункері, а тензорезистивні датчики сили з'єднані з аналого-цифровими перетворювачами згідно з корисною моделлю додатково введені дозатор, що розташований у бункері, та електропривід вимірювального лотка, які через цифроаналоговий перетворювач підключені до мікропроцесора. Введення таких додаткових елементів як дозатор, що розташований у бункері, та електропривід вимірювального лотка і підключення їх через цифроаналоговий перетворювач до мікропроцесора дає можливість моделювання процесів вимірювання вагової витрати сипких матеріалів. На фіг. 1 зображено функціональну схему ваговимірювальної системи. Загальний вигляд системи та конструкція вимірювального лотка зображені на фіг. 2. Ваговимірювальна система складається з бункера 1 з дозованим компонентом, електровібратора 2, датчика 3 вологості матеріалу, що розташовані у бункері, встановленого під бункером стрічкового конвеєра 4 з електроприводом 5, датчика 6 швидкості руху стрічки конвеєра. Під конвеєром закріплено вимірювальний лоток 7, зв'язаний шарнірними з'єднанням з тензорезистивними датчиками сили 8, 9, 10, що підключені до аналогоцифрових перетворювачів 11, 12, 13, з'єднаних з мікропроцесором 14. Датчик 15 розтягання стрічки, кінцеві вимикачі 16, датчик швидкості руху стрічки конвеєра, які закріплені на конвеєрі, та датчик 17 температури підключені до мікропроцесора, з'єднаного з адресним дешифратором 18, накопичувачем пам'яті 19, оперативним запам'ятовувальним пристроєм 20, регістром 21 адреси, блоком 22 індикації та функціональною клавіатурою 23, цифроаналоговим перетворювачем 24 підключеним до електропривода 5 й електровібратора 2. До мікропроцесора 14 через цифроаналоговий перетворювач 24 підключені також дозатор 25, що розташований у бункері 1, та електропривід 26 вимірювального лотка 7. 58098 4 Ваговимірювальна система працює наступним чином. Шихта з бункера 1 надходить на стрічковий конвеєр 4, потім на вимірювальний лоток 7. Надходження сипкого матеріалу на стрічковий конвеєр контролюється за допомогою кінцевих вимикачів 16, які розташовані над поверхнею стрічкового конвеєра 4. Якщо сипкий матеріал надходить у достатній кількості на стрічковий конвеєр 4, то кінцеві вимикачі 16 не спрацьовують, якщо в недостатній кількості, то вони спрацьовують. У випадку спрацювання кінцевих вимикачів 16 подається сигнал на мікропроцесор 14, з якого через цифроаналоговий перетворювач 24 подається сигнал на електровібратор 2. Якщо надходження сипкого матеріалу не почалося, то мікропроцесор 14 видає сигнал на електропривід 5 стрічкового конвеєра 4 для його зупинки, а також на блок 22 індикаціїсигнал аварійної зупинки стрічкового конвеєра 4. З конвеєра сипкий матеріал надходить на вимірювальний лоток 7. Сипкий матеріал, що рухається по вимірювальному лотку 7, впливає на тензорезистивні датчики 8, 9, 10 сили розтягування (ТДС). Сигнали з ТДС за допомогою аналого-цифрових перетворювачей 11, 12, 13 перетворюються на цифрові, та обробляються мікропроцесором 14. У даній системі використовується шарнірне кріплення всіх вузлів, вони дозволяють позбутися поперечних сил і моментів, що виникають у результаті температурного впливу та деформацій окремих деталей і вузлів монтажу. Для врахування впливу вологості сипкого матеріалу використовується датчик 3 вологості, сполучений безпосередньо з мікропроцесором 14. Якщо вологість матеріалу відрізняється від заданої, то мікропроцесор 14 сигналізує оператору про необхідність зміни кута нахилу вимірювального лотка 7. Для врахування впливу температури використовується мікроелектронний температурний датчик 17, сполучений безпосередньо з мікропроцесором 14. Кількість шихти, яка надходить на вимірювальний лоток 7, регулюється зміною швидкості руху стрічки конвеєра 4, для цього в системі використовується датчик 6 швидкості руху конвеєрної стрічки: - якщо витрата шихти недостатня, то мікропроцесор 14 видає сигнал на електропривод 5 конвеєра 4 для підвищення швидкості руху конвеєрної стрічки; - якщо витрата шихти перевищила задану, то мікропроцесор 14 видає сигнал на електропривід 5 конвеєра 4 для зменшення швидкості руху конвеєрної стрічки. Цей процес триває до тих пір, доки витрата матеріалу не буде згідно заданій величині. В мікропроцесорі 14 зберігається матриця планування повного факторного експерименту, яка наведена в таблиці і необхідна для отримання математичної моделі f ( x1, x 2 , x 3 ) , 5 58098 де - погрішність вимірювання, %; x1 -кут нахилу ваговимірювального лотка , градуси; x 2 вологість сипкого матеріалу W , %; x 3 - коефіцієнт тертя fd сипкого матеріалу в русі. Таблиця Матриця планування експерименту Номер досліду 1 2 3 4 5 6 7 8 Фактори x2 x1 -1 +1 -1 +1 -1 +1 -1 +1 x3 -1 -1 +1 +1 -1 -1 +1 +1 -1 -1 -1 -1 +1 +1 +1 +1 Для установлення значень рівнів факторів, що задаються першим рядком матриці планування, мікропроцесор 14 через цифроаналоговий перет 6 ворювач 24 подає сигнал на електропривід, який установлює відповідний кут нахилу вимірювального лотка 7. Вологість сипкого матеріалу, яка вимірюється датчиком 3, у мікропроцесорі 14 порівнюється із необхідним значенням, що задається в першому рядку матриці планування. У випадку розбіжності цих значень мікропроцесор 14 через цифроаналоговий петворювач 24 видає сигнал на дозатори 25 для зміни вологості W матеріалу. При цьому сипкий матеріал у бункері 1 перемішується з підключенням електровібратора 2. Зміна коефіцієнта тертя fd досягається шляхом заміни типу матеріала, що загружається в бункер 1. Після установлення значень рівнів факторів, що задаються першим рядком матриці планування, вага сипкого матеріалу обчислюється мікропроцесором 14 по сигналах, що поступають з тензорезистивних датчиків сили розтягування 8, 9, 10 через аналогоцифрові перетворювачі 11, 12, 13. В мікропроцесорі також обчислюється і похібка вимірювання 8. Потім установлюються значення рівнів факторів, що задаються другим рядком матриці планування експерименту. При цьому система працює аналогічно. Після реалізації всіх дослідів плана експерименту в мікропроцесорі 14 обчислюються коефіцієнти математичної моделі b0 b1х1 b2 х 2 b3 х 3 b12 х1х 2 b13 х1х 3 b23 х 2 х 3 b123 х1х 2 х 3 З використанням математичної моделі знаходяться оптимальні параметри , W , fd , які забезпечують мінімальну похибку ваговимірювальної системи. Застосування дозатора, що розташований у бункері, та електроприводу вимірювального лотка, які через цифроаналоговий перетворювач підклюматеріалу. чені до мікропроцесора дозволяє моделювати процеси вимірювання вагової витрати сипких матеріалів, що, в свою чергу, дозволяє підвищити точність вимірювання ваговимірювальної системи та забезпечити високу точність дозування сипкого 7 Комп’ютерна верстка Н. Лиcенко 58098 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюWeight-measuring system
Автори англійськоюKoshovyi Mykola Dmytrovych, Kostenko Olena Mykhailivna
Назва патенту російськоюВесоизмерительная система
Автори російськоюКошевой Николай Дмитриевич, Костенко Елена Михайловна
МПК / Мітки
МПК: G01F 11/00
Мітки: система, ваговимірювальна
Код посилання
<a href="https://ua.patents.su/4-58098-vagovimiryuvalna-sistema.html" target="_blank" rel="follow" title="База патентів України">Ваговимірювальна система</a>
Ваговимірювальна система
Номер патенту: 27285
Опубліковано: 25.10.2007
Автори: Кошовий Микола Дмитрович, Черепащук Григорій Олександрович, Калашніков Євген Євгенович
МПК: G01F 11/00
Мітки: ваговимірювальна, система
Формула / Реферат:
Ваговимірювальна система, що містить бункер і похилий вимірювальний лоток, зв'язаний шарнірним з'єднанням з тензорезистивним датчиком сили, стрічковий конвеєр з електроприводом, установлений під бункером, датчик швидкості руху стрічки, датчик температури, датчик розтягання стрічки, кінцеві вимикачі, закріплені на конвеєрі, аналого-цифровий перетворювач, які підключені до мікропроцесора, з'єднаного із блоком індикації, функціональною...
Ваговимірювальна система
Номер патенту: 18286
Опубліковано: 15.11.2006
Автори: Кошовий Микола Дмитрович, Черепащук Григорій Олександрович, Калашніков Євген Євгенович
МПК: G01F 11/00
Мітки: ваговимірювальна, система
Формула / Реферат:
Ваговимірювальна система, що містить бункер і вимірювальний лоток, яка відрізняється тим, що до складу системи додатково уведені стрічковий конвеєр з електроприводом, установлений під бункером, датчик швидкості руху стрічки, датчик температури, датчик розтягання стрічки, кінцеві вимикачі, закріплені на конвеєрі, аналого-цифровий перетворювач, які підключені до мікропроцесора, з'єднаного із блоком індикації, функціональною клавіатурою,...
Конвеєрні ваги
Номер патенту: 26945
Опубліковано: 10.10.2007
Автори: Павлов Володимир Евгенійович, Носіков Віталій Петрович, Поповкін Юрій Матвійович
МПК: G01G 13/00
Формула / Реферат:
Конвеєрні ваги, які містять датчик ваги, аналого-цифровий перетворювач, датчик швидкості, мікропроцесор, які відрізняються тим, що вагова платформа виконана з листового металу плоскої або жолобчастої форми, з двох сторін по ходу стрічки обмеженої напрямними роликами.
Система управління процесом снування
Номер патенту: 8438
Опубліковано: 15.08.2005
Автор: Клименко Дмитро Сергійович
МПК: D02H 13/00
Мітки: процесом, система, снування, управління
Формула / Реферат:
Система управління процесом снування, що містить пульт управління, систему управління, снувальну машину, датчик обриву ниток, датчик лінійної швидкості снування, датчик натягу, блок вимірювання та контролю натягу, яка відрізняється тим, що датчик натягу виконано акустичним з направленим резонатором, а блок вимірювання та контролю натягнення виконано на базі мікроконтролера, а управління натягом ниток виконується одночасно для всіх ниток...
Система годівлі комбікормами
Номер патенту: 62793
Опубліковано: 15.12.2003
Автори: Шалімов Віктор Олександрович, Смоквина Володимир Віталійович, Гуцул Василь Іванович, Шалімова Марина Олександрівна, Прохватілов Сергій Григорович, Віхрова Лариса Григорівна, Головатий Сергій Сергійович
МПК: A01K 5/02
Мітки: система, годівлі, комбікормами
Формула / Реферат:
Система годівлі комбікормами, що містить годівницю, обмежувач руху, бункер, під яким розміщений вібродозатор, з'єднаний з електромагнітом-вібратором, керованим блоком відпрацювання, які електрично зв'язані з блоком управління, що своїм виходом з'єднаний з рамкою розпізнавання, яка відрізняється тим, що вона додатково обладнана датчиком витрат, а також датчиком рівня комбікорму в бункері.
Попередній патент: Витратомір палива
Наступний патент: Спосіб визначення температури різального інструмента
Випадковий патент: Пневмопульсуючий спосіб формування складних просторових форм