Спосіб дистанційного визначення лінійних розмірів або кутового положення нестаціонарних об’єктів та пристрій для його здійснення
Номер патенту: 60545
Опубліковано: 15.10.2003
Автори: Купчик Михайло Вікторович, Купчик Віктор Георгійович
Формула / Реферат
1. Спосіб дистанційного визначення лінійних розмірів або кутового положення нестаціонарних об'єктів, що включає направлення на об'єкт багатопроменевого оптичного випромінювання та визначення лінійних розмірів, що здійснюється шляхом порівняння результатів виміру тіньової проекції з еталонною, який відрізняється тим, що на об'єкт направляється однопроменеве оптичне випромінювання, а лінійні розміри або кутове положення об’єкта визначається за часом відсутності випромінювання на приймачі оптичного випромінювання.
2. Пристрій для дистанційного визначення лінійних розмірів або кутового положення нестаціонарних об'єктів, що містить оптичний випромінювач, приймач оптичного випромінювання, систему обробки прийнятого оптичного випромінювання та систему обробки результатів вимірювання, який відрізняється тим, що оптична система являє собою однопроменевий випромінювач і однопроменевий приймач оптичного випромінювання, а система обробки прийнятого оптичного випромінювання і система обробки результатів вимірювання містять блоки калібрування та синхронізації.
Текст
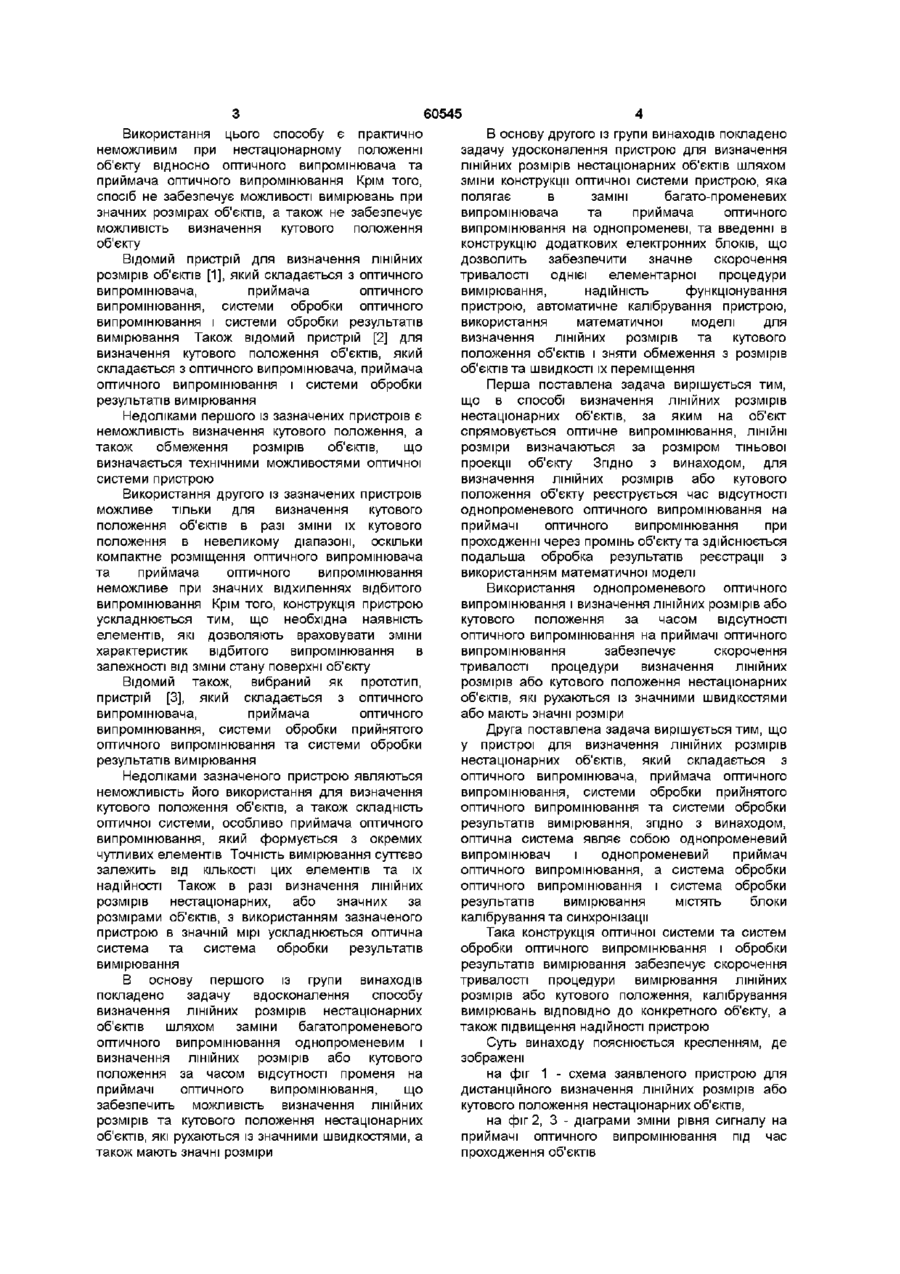
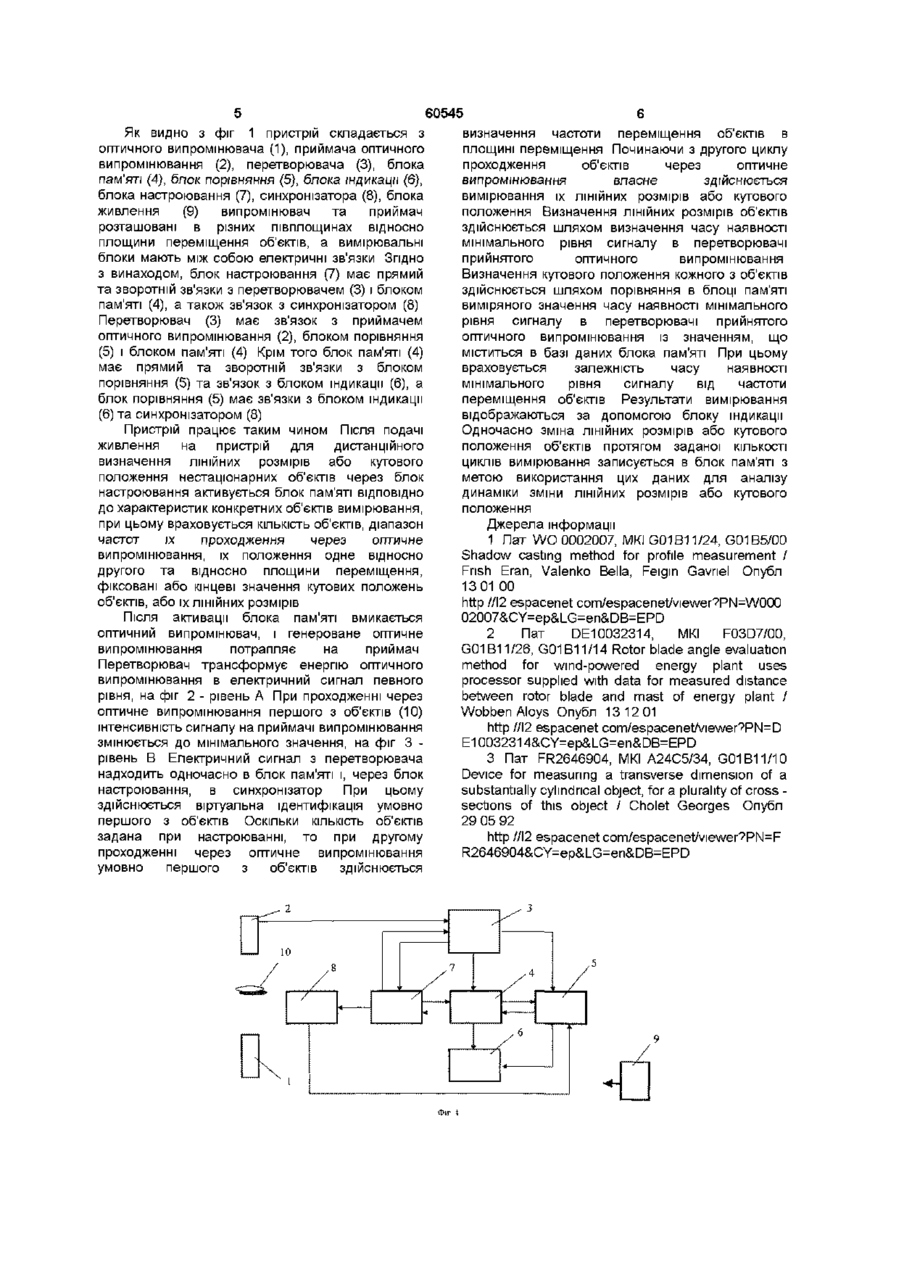
1 Спосіб дистанційного визначення ЛІНІЙНИХ розмірів або кутового положення нестаціонарних об'єктів, що включає направлення на об'єкт багатопроменевого оптичного випромінювання та визначення ЛІНІЙНИХ розмірів, що здійснюється шляхом порівняння результатів виміру тіньової проекції з еталонною, який відрізняється тим, що на об'єкт направляється однопроменеве оптичне випромінювання, а ЛІНІЙНІ розміри або кутове Взаємозв'язана група винаходів належить до вимірювальної техніки, зокрема до вимірювання ЛІНІЙНИХ розмірів та кутів, і до конструкції приладу, що використовується при цьому, і може бути застосована для вимірювання ЛІНІЙНИХ розмірів та кутового положення нестаціонарних об'єктів в промисловості, будівництві, на транспорті, в експериментальних дослідженнях Відомий спосіб вимірювання ЛІНІЙНИХ розмірів об'єктів [1], який полягає в тому, що при розміщенні об'єкту в направленому оптичному випромінюванні на приймачі оптичного випромінювання створюється тіньова проекція об'єкту, а ЛІНІЙНІ розміри визначаються шляхом порівняння отриманої проекції з еталонною Також відомий спосіб дистанційного вимірювання кутового положення нестаціонарних об'єктів [2], в якому на об'єкт спрямовується імпульсне оптичне випромінювання, а відбитий від поверхні об'єкту промінь реєструється приймачем оптичного випромінювання Визначення кутового положення об'єкту при цьому здійснюються шляхом обробки характеристик відбитого променя за допомогою математичної моделі положення об'єкта визначається за часом відсутності випромінювання на приймачі оптичного випромінювання 2 Пристрій для дистанційного визначення ЛІНІЙНИХ розмірів або кутового положення нестаціонарних об'єктів, що містить оптичний випромінювач, приймач оптичного випромінювання, систему обробки прийнятого оптичного випромінювання та систему обробки результатів вимірювання, який відрізняється тим, що оптична система являє собою однопроменевий випромінювач і однопроменевий приймач оптичного випромінювання, а система обробки прийнятого оптичного випромінювання і система обробки результатів вимірювання містять блоки калібрування та синхронізації Використання наведених способів є доцільним при стаціонарному положенні або незначних швидкостях переміщення об'єктів Застосування першого із наведених способів є неможливим для визначення кутового положення об'єктів, а для якісного визначення кутового положення нестаціонарних об'єктів з використанням імпульсного оптичного випромінювання, необхідно забезпечити високу частоту генерації випромінювання та приймання відбитого променя Також в разі, якщо ЛІНІЙНІ розміри або кутове положення об'єкту змінюються в широкому діапазоні, реєстрація відбитого променя значно ускладнюється, а в разі зміни стану поверхні об'єкту можливі значні помилки при визначенні його ЛІНІЙНИХ розмірів та кутового положення Відомий, вибраний як прототип, спосіб вимірювання ЛІНІЙНИХ розмірів об'єктів [3], в якому, як і в заявленому способі, на об'єкт направляється оптичне випромінювання, при цьому оскільки випромінювання багатопроменеве, то на приймачі оптичного випромінювання створюється лінійна тіньова проекція об'єкту, а визначення ЛІНІЙНИХ розмірів здійснюється шляхом порівняння результатів виміру тіньової проекції з еталонною ю ю о (О 60545 Використання цього способу є практично неможливим при нестаціонарному положенні об'єкту відносно оптичного випромінювача та приймача оптичного випромінювання Крім того, спосіб не забезпечує можливості вимірювань при значних розмірах об'єктів, а також не забезпечує можливість визначення кутового положення об'єкту Відомий пристрій для визначення ЛІНІЙНИХ розмірів об'єктів [1], який складається з оптичного випромінювача, приймача оптичного випромінювання, системи обробки оптичного випромінювання і системи обробки результатів вимірювання Також відомий пристрій [2] для визначення кутового положення об'єктів, який складається з оптичного випромінювача, приймача оптичного випромінювання і системи обробки результатів вимірювання Недоліками першого із зазначених пристроїв є неможливість визначення кутового положення, а також обмеження розмірів об'єктів, що визначається технічними можливостями оптичної системи пристрою Використання другого із зазначених пристроїв можливе тільки для визначення кутового положення об'єктів в разі зміни їх кутового положення в невеликому діапазоні, оскільки компактне розміщення оптичного випромінювача та приймача оптичного випромінювання неможливе при значних відхиленнях відбитого випромінювання Крім того, конструкція пристрою ускладнюється тим, що необхідна наявність елементів, які дозволяють враховувати зміни характеристик відбитого випромінювання в залежності від зміни стану поверхні об'єкту Відомий також, вибраний як прототип, пристрій [3], який складається з оптичного випромінювача, приймача оптичного випромінювання, системи обробки прийнятого оптичного випромінювання та системи обробки результатів вимірювання Недоліками зазначеного пристрою являються неможливість його використання для визначення кутового положення об'єктів, а також складність оптичної системи, особливо приймача оптичного випромінювання, який формується з окремих чутливих елементів Точність вимірювання суттєво залежить від КІЛЬКОСТІ ЦИХ елементів та їх надійності Також в разі визначення ЛІНІЙНИХ розмірів нестаціонарних, або значних за розмірами об'єктів, з використанням зазначеного пристрою в значній мірі ускладнюється оптична система та система обробки результатів вимірювання В основу першого із групи винаходів покладено задачу вдосконалення способу визначення ЛІНІЙНИХ розмірів нестаціонарних об'єктів шляхом заміни багатопроменевого оптичного випромінювання однопроменевим і визначення ЛІНІЙНИХ розмірів або кутового положення за часом відсутності променя на приймачі оптичного випромінювання, що забезпечить можливість визначення ЛІНІЙНИХ розмірів та кутового положення нестаціонарних об'єктів, які рухаються із значними швидкостями, а також мають значні розміри В основу другого із групи винаходів покладено задачу удосконалення пристрою для визначення ЛІНІЙНИХ розмірів нестаціонарних об'єктів шляхом зміни конструкції оптичної системи пристрою, яка полягає в заміні багато-променевих випромінювача та приймача оптичного випромінювання на однопроменеві, та введенні в конструкцію додаткових електронних блоків, що дозволить забезпечити значне скорочення тривалості однієї елементарної процедури вимірювання, надійність функціонування пристрою, автоматичне калібрування пристрою, використання математичної моделі для визначення ЛІНІЙНИХ розмірів та кутового положення об'єктів і зняти обмеження з розмірів об'єктів та швидкості їх переміщення Перша поставлена задача вирішується тим, що в способі визначення ЛІНІЙНИХ розмірів нестаціонарних об'єктів, за яким на об'єкт спрямовується оптичне випромінювання, ЛІНІЙНІ розміри визначаються за розміром тіньової проекції об'єкту Згідно З винаходом, для визначення ЛІНІЙНИХ розмірів або кутового положення об'єкту реєструється час відсутності однопроменевого оптичного випромінювання на приймачі оптичного випромінювання при проходженні через промінь об'єкту та здійснюється подальша обробка результатів реєстрації з використанням математичної моделі Використання однопроменевого оптичного випромінювання і визначення ЛІНІЙНИХ розмірів або кутового положення за часом відсутності оптичного випромінювання на приймачі оптичного випромінювання забезпечує скорочення тривалості процедури визначення ЛІНІЙНИХ розмірів або кутового положення нестаціонарних об'єктів, які рухаються із значними швидкостями або мають значні розміри Друга поставлена задача вирішується тим, що у пристрої для визначення ЛІНІЙНИХ розмірів нестаціонарних об'єктів, який складається з оптичного випромінювача, приймача оптичного випромінювання, системи обробки прийнятого оптичного випромінювання та системи обробки результатів вимірювання, згідно з винаходом, оптична система являє собою однопроменевий випромінювач і однопроменевий приймач оптичного випромінювання, а система обробки оптичного випромінювання і система обробки результатів вимірювання містять блоки калібрування та синхронізації Така конструкція оптичної системи та систем обробки оптичного випромінювання і обробки результатів вимірювання забезпечує скорочення тривалості процедури вимірювання ЛІНІЙНИХ розмірів або кутового положення, калібрування вимірювань ВІДПОВІДНО до конкретного об'єкту, а також підвищення надійності пристрою Суть винаходу пояснюється кресленням, де зображені на фіг 1 - схема заявленого пристрою для дистанційного визначення ЛІНІЙНИХ розмірів або кутового положення нестаціонарних об'єктів, на фіг 2, 3 - діаграми зміни рівня сигналу на приймачі оптичного випромінювання під час проходження об'єктів 60545 визначення частоти переміщення об'єктів в площині переміщення Починаючи з другого циклу проходження об'єктів через оптичне випромінювання власне здійснюється вимірювання їх ЛІНІЙНИХ розмірів або кутового положення Визначення ЛІНІЙНИХ розмірів об'єктів здійснюється шляхом визначення часу наявності мінімального рівня сигналу в перетворювачі прийнятого оптичного випромінювання Визначення кутового положення кожного з об'єктів здійснюється шляхом порівняння в блоці пам'яті виміряного значення часу наявності мінімального рівня сигналу в перетворювачі прийнятого оптичного випромінювання із значенням, що міститься в базі даних блока пам'яті При цьому (5) і блоком пам'яті (4) Крім того блок пам'яті (4) враховується залежність часу наявності має прямий та зворотній зв'язки з блоком мінімального рівня сигналу від частоти порівняння (5) та зв'язок з блоком індикації (6), а переміщення об'єктів Результати вимірювання блок порівняння (5) має зв'язки з блоком індикації відображаються за допомогою блоку індикації (6) та синхронізатором (8) Одночасно зміна ЛІНІЙНИХ розмірів або кутового Пристрій працює таким чином Після подачі положення об'єктів протягом заданої КІЛЬКОСТІ живлення на пристрій для дистанційного ЦИКЛІВ вимірювання записується в блок пам'яті з визначення ЛІНІЙНИХ розмірів або кутового метою використання цих даних для аналізу положення нестаціонарних об'єктів через блок динаміки зміни ЛІНІЙНИХ розмірів або кутового настроювання активується блок пам'яті ВІДПОВІДНО положення до характеристик конкретних об'єктів вимірювання, при цьому враховується КІЛЬКІСТЬ об'єктів, діапазон Джерела інформації частот їх проходження через оптичне 1 Пат WO 0002007, MKIG01B11/24, G01B5/00 випромінювання, їх положення одне відносно Shadow casting method for profile measurement / другого та відносно площини переміщення, Fnsh Eran, Valenko Bella, Feigm Gavnel Опубл фіксовані або кінцеві значення кутових положень 13 01 00 об'єктів, або їх ЛІНІЙНИХ розмірів http //12 espacenet com/espacenet/viewer?PN=W000 Після активації блока пам'яті вмикається 02007&CY=ep&LG=en&DB=EPD оптичний випромінювач, і генероване оптичне 2 Пат DE10032314, MKI F03D7/00, випромінювання потрапляє на приймач G01B11/26, G01B11/14 Rotor blade angle evaluation Перетворювач трансформує енергію оптичного method for wind-powered energy plant uses випромінювання в електричний сигнал певного processor supplied with data for measured distance рівня, на фіг 2 - рівень А При проходженні через between rotor blade and mast of energy plant / оптичне випромінювання першого з об'єктів (10) Wobben Aloys Опубл 13 12 01 інтенсивність сигналу на приймачі випромінювання http //12 espacenet com/espacenet/viewer^PN^D змінюється до мінімального значення, на фіг 3 E10032314&CY=ep&LG=en&DB=EPD рівень В Електричний сигнал з перетворювача 3 Пат FR2646904, MKI A24C5/34, G01B11/10 надходить одночасно в блок пам'яті і, через блок Device for measuring a transverse dimension of a настроювання, в синхронізатор При цьому substantially cylindrical object, for a plurality of cross здійснюється віртуальна ідентифікація умовно sections of this object / Cholet Georges Опубл першого з об'єктів Оскільки КІЛЬКІСТЬ об'єктів 29 05 92 задана при настроюванні, то при другому http //12 espacenet com/espacenet/viewer^PN^F проходженні через оптичне випромінювання R2646904&CY=ep&LG=en&DB=EPD умовно першого з об'єктів здійснюється Як видно з фіг 1 пристрій складається з оптичного випромінювача (1), приймача оптичного випромінювання (2), перетворювача (3), блока пам'яті (4), блок порівняння (5), блока індикації (6), блока настроювання (7), синхронізатора (8), блока живлення (9) випромінювач та приймач розташовані в різних півплощинах відносно площини переміщення об'єктів, а вимірювальні блоки мають між собою електричні зв'язки Згідно з винаходом, блок настроювання (7) має прямий та зворотній зв'язки з перетворювачем (3) і блоком пам'яті (4), а також зв'язок з синхронізатором (8) Перетворювач (3) має зв'язок з приймачем оптичного випромінювання (2), блоком порівняння 60545 сг Фіг Комп'ютерна верстка М Клюкш Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for distantly determining the linear dimensions and angular position of a movable object and a device for the realization of the method
Назва патенту російськоюСпособ дистанционного определения линейных размеров и углового положения нестационарного объекта и устройство для осуществления способа
МПК / Мітки
МПК: G01B 11/26, G01B 11/04
Мітки: спосіб, об'єктів, положення, нестаціонарних, лінійних, визначення, пристрій, здійснення, розмірів, дистанційного, кутового
Код посилання
<a href="https://ua.patents.su/4-60545-sposib-distancijjnogo-viznachennya-linijjnikh-rozmiriv-abo-kutovogo-polozhennya-nestacionarnikh-obehktiv-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного визначення лінійних розмірів або кутового положення нестаціонарних об’єктів та пристрій для його здійснення</a>
Спосіб безконтактного, дистанційного визначення лінійних розмірів та пристрій для його реалізації
Номер патенту: 56400
Опубліковано: 15.05.2003
Автори: Ощепков Анатолій Миколайович, Доренський Володимир Миколайович, Коваленко Валерій Володимирович
МПК: G01B 11/00, G01B 11/26
Мітки: безконтактного, дистанційного, пристрій, визначення, лінійних, спосіб, розмірів, реалізації
Формула / Реферат:
1. Спосіб безконтактного, дистанційного визначення лінійних розмірів, що включає калібровку вимірювального каналу та візування оптико-електронними перетворювачами країв об'єкту визначення розмірів, який відрізняється тим, що з метою підвищення надійності та точності визначення розмірів, а також підвищення надійності експлуатації у кожному циклі визначення розмірів одночас з візуванням об'єкту виконують візування калібрувальних реперів після...
Спосіб вимірювання лінійних розмірів та пристрій для його здійснення
Номер патенту: 57921
Опубліковано: 15.07.2003
Автор: Іванов Борис Миколайович
МПК: G01B 11/02
Мітки: пристрій, лінійних, вимірювання, спосіб, здійснення, розмірів
Формула / Реферат:
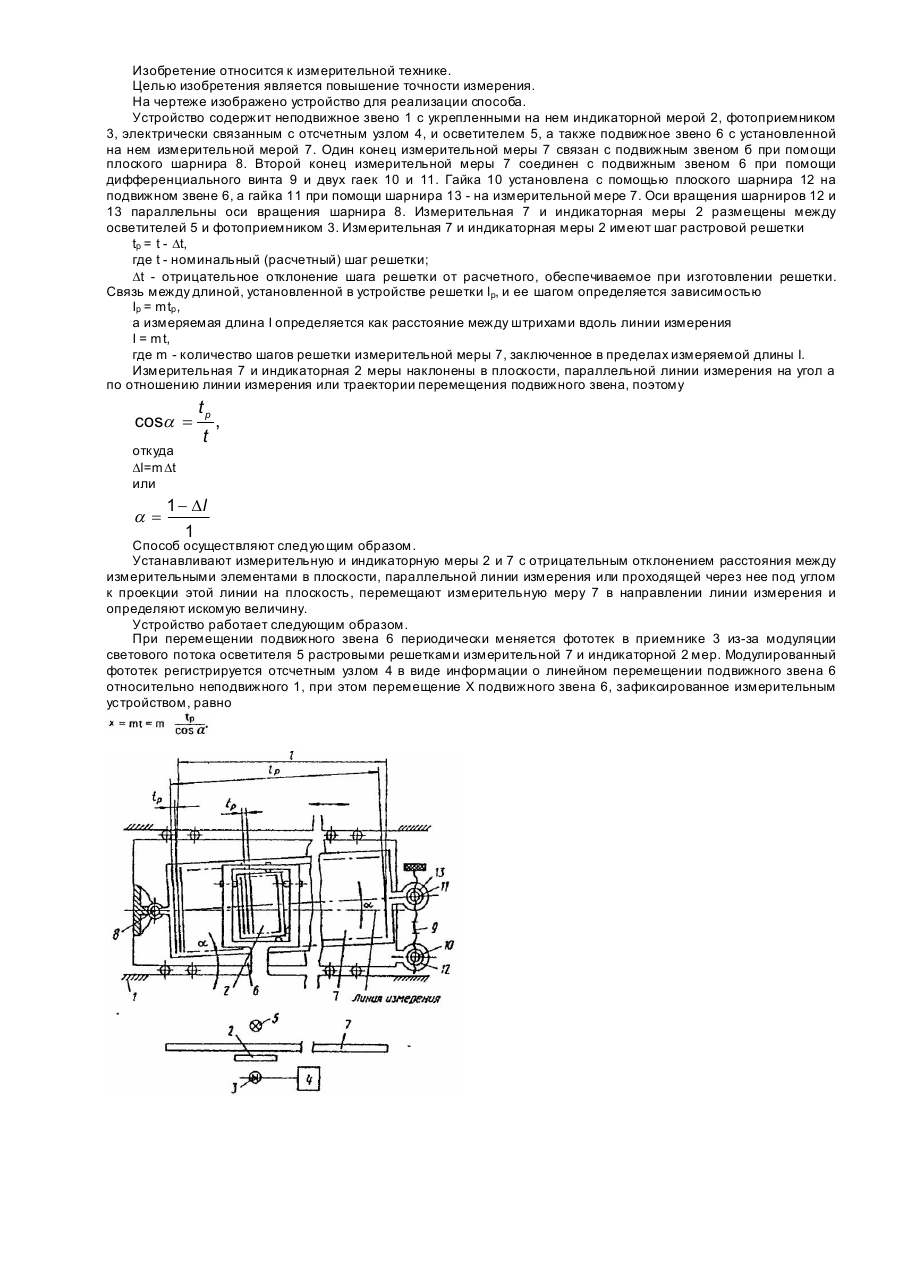
1. Способ измерения линейных размеров, заключающийся в том, что устанавливают измерительную и индикаторную меры в параллельных плоскостях, перемещают измерительную меру и по полученным результатам судят об измеряемой величине, отличающийся тем, что, с целью повышения точности, измерительную и индикаторную меры с отрицательным отклонением расстояния между измерительными элементами устанавливают в плоскости, параллельной линии измерения или...
Спосіб вимірювання кутового положення вала і пристрій для його здійснення
Номер патенту: 19848
Опубліковано: 25.12.1997
Автор: Ковбаса Анатолій Миколайович
Мітки: положення, здійснення, кутового, пристрій, вимірювання, спосіб, вала
Формула / Реферат:
1. Способ измерения углового положения вала, включающий формирование последовательности периодически изменяющихся кодовых сигналов, преобразование этой последовательности в первую пару ортогональных опорных сигналов и запитку датчика угла переменным сигналом, отличающийся тем, что преобразуют последовательность периодически изменяющихся кодов во вторую - N-ю пары положительных и отрицательных гармоник для каждого ортогонального опорного...
Еталон для ангіографічного визначення лінійних розмірів кровоносної судини
Номер патенту: 354
Опубліковано: 19.07.1999
Автори: Карпович Іван Павлович, Устінов Микола Іванович, Володось Микола Леонтіїйович, Троян Володимир Іванович, Калашнікова Юлія Валентинівна
МПК: A61B 5/103, G01B 5/02
Мітки: розмірів, еталон, кровоносної, визначення, судині, лінійних, ангіографічного
Формула / Реферат:
Еталон для ангіографічного визначення лінійних розмірів кровоносної судини, що містить гнучкий трубчастий провідник та зв'язані з ним таровані по довжині вимірювальні елементи з рентгеноконтрастного матеріалу, розташовані на відстані один від одного вдовж осі провідника, який відрізняється тим, що вимірювальні елементи виконані у вигляді розташованих у внутрішній порожнині провідника циліндрів, діаметр І довжина яких, а також відстань між...
Спосіб непрямого визначення лінійних розмірів аорти, наприклад черевної
Номер патенту: 55800
Опубліковано: 15.04.2003
Автор: Калашнікова Юлія Валентинівна
МПК: G01N 21/79, A61B 5/103, G01N 33/52, A61B 5/107, G01N 21/27, G01B 5/02
Мітки: аорти, наприклад, непрямого, спосіб, черевної, розмірів, визначення, лінійних
Формула / Реферат:
1. Спосіб непрямого визначення лінійних розмірів аорти, наприклад черевної, шляхом одномоментного виконання ангіограм сегментів аорти і еталона, що вимірюються, та наступного пропорційного порівняння розмірів їх ангіографічних зображень, який відрізняється тим, що вихідні ангіографічні зображення аорти і еталона перед пропорційним їх порівнянням контрастують.2. Спосіб непрямого визначення лінійних розмірів аорти, наприклад черевної за...
Попередній патент: Супозиторій
Наступний патент: Спосіб підйому води у водопровідних мережах
Випадковий патент: Спосіб виплавки сталі у подовій печі