Спосіб вимірювання кутового положення вала і пристрій для його здійснення


Формула / Реферат
1. Способ измерения углового положения вала, включающий формирование последовательности периодически изменяющихся кодовых сигналов, преобразование этой последовательности в первую пару ортогональных опорных сигналов и запитку датчика угла переменным сигналом, отличающийся тем, что преобразуют последовательность периодически изменяющихся кодов во вторую - N-ю пары положительных и отрицательных гармоник для каждого ортогонального опорного сигнала первой пары с начальной фазой, пропорциональной номеру s= пары, запитку датчика угла осуществляют сигналами, образованными из периодически изменяющихся кодовых сигналов, формируют на выходах датчика угла К синусоидальных сигналов, мгновенные значения которых пропорциональны синусу угла q поворота вала, а начальные фазы пропорциональны номеру k = синусоидального сигнала, преобразуют эти синусоидальные сигналы в первый и второй ортогональные сигналы, мгновенные значения которых пропорциональны соответственно синусу и косинусу угла q, а амплитуды равны амплитудам опорных гармоник, определяют начальные фазы опорных гармоник в s-й паре по значению кодового сигнала, соответствующему равенству этих гармоник, определяют промежуточное значение qпром. угла q по значению кодового сигнала, соответствующему равенству измерительного сигнала, имеющего меньшее абсолютное значение, с соответствующей опорной гармоникой в s-й паре, определяют разность значения qпром, и начальной фазы той опорной гармоники в s -й паре, по которой определено значение 0пром определяют по найденной разности и знаку измерительного сигнала, имеющего большее абсолютное значение, предварительное значение q прєдв, угла q, корректируют значение q првдв в соответствии с выражениями:
для первого ортогонального измерительного сигнала и +Ss
и определяют значение угла q как сумму его скорректированного значения qk и заранее известного начального отсчета q 0.
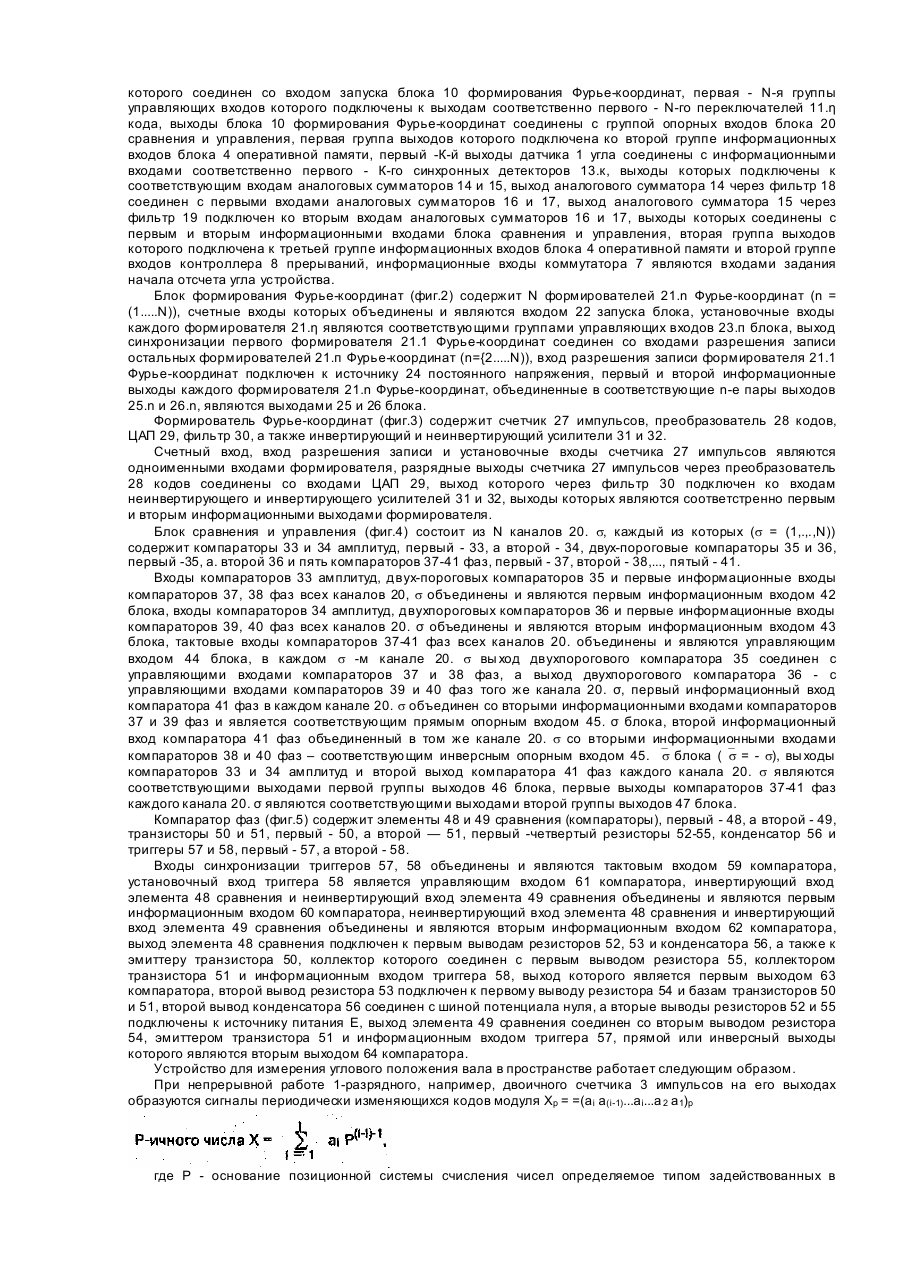
2. Устройство для измерения углового положения вала, содержащее Датчик угла, генератор тактовых импульсов, выход которого соединен со входом счетчика импульсов, отличающееся тем, что в устройство введены блок оперативной памяти, выходной регистр, блок отображения информации, коммутатор, контроллер прерываний, вычислительный блок, блок формирования Фурье-координат, переключатели кода, преобразователь сигналов, синхронные детекторы, аналоговые сумматоры, фильтры и блок сравнения и управления, управляющий вход которого подключен к выходу генератора тактовых импульсов, выходы счетчика импульсов соединены с первой группой информационных входов блока оперативной памяти, выходы которого объединены с выходами коммутатора и подключены к информационным входам выходного регистра и к первым группам входов блока отображения информации и вычислительного блока, первая группа выходов которого соединена со второй группой входов блока отображения информации и группой адресных входов блока оперативной памятки вторая группа выходов вычислительного блока подключена к первой группе входов контроллера прерываний, выходы которого соединены со второй группой входов вычислительного блока, управляющий выход которого подключен к управляющим входам блока отображения информации и выходного регистра, выходы которого являются выходами устройства, вход выбора выходного регистра, вход выбора коммутатора соединены с соответствующим разрядом первой группы выходов вычислительного блока, опорные входы первого - К-го синхронных детекторов объединены со входом преобразователя сигнала и подключены к соответствующему разряду выходов счетчика импульсов, выход синхронизации которого соединен с входом запуска блока формирования Фурье-координат, первая -N-я группы управляющих входов которого подключены к выходам соответственно первого - N-гo переключателей кода, выходы блока формирования Фурье-координат соединены с группой опорных входов блока сравнения и управления, первая группа выходов которого подключена ко второй группе информационных входов блока оперативной памяти, первый - К-й выходы датчика угла соединены с информационными входами соответственно первого - К-го синхронных детекторов, выходы которых подключены к соответствующим входам первого и второго аналоговых сумматоров, выход первого аналогового сумматора через первый фильтр соединен с первыми входами третьего и четвертого аналоговых сумматоров, выход второго аналогового сумматора через второй фильтр подключен ко вторым входам третьего и четвертого аналоговых сумматоров, выходы которых соединены с первым и вторым информационными входами блока сравнения и управления, вторая группа выходов которого подключена к третьей группе информационных входов блока оперативной памяти и второй группе входов контроллера прерываний, информационные входы коммутатора являются входами задания начала отсчета устройства.
3. Устройство по п.2, отличающееся тем, что блок формирования Фурье-координат содержит N формирователей Фурье-координат, счетные входы которых объединены и являются входом запуска блока, установочные входы каждого формировау теля Фурье-координат являются соответствующими группами управляющих входов блока, выход, синхронизации первого формирователя Фурье-координат соединен со входами разрешения записи остальных формирователей Фурье-координат, вход разрешения записи первого формирователя Фурье-координат подключен к источнику постоянного напряжения, первый и второй информационные выходы каждого формирователя Фурье-координат являются соответствующими выходами блока.
4. Устройство по п.3, отличающееся тем, что формирователь Фурье-координат содержит преобразователь кодов, цифроаналоговый преобразователь, фильтр, инвертирующий и неинвертирующий усилители и счетчик импульсов, счетный вход, вход разрешения записи и установочные входы которого являются одноименными входами формирователя, выход переполнения счетчика импульсов является выходом синхронизации формирователя, разрядные выходы счетчика импульсов через преобразователь кодов соединены со входами цифроаналогового преобразователя, выход которого через фильтр подключен ко входам неинвертирующего и инвертирующего усилителей, выходы которых являются соответственно первым и вторым информационными выходами формирователя.
5. Устройство по п.2, отличающее-с я тем, что блок сравнения и управления состоит из N каналов, каждый из которых содержит первый и второй компараторы амплитуд, первый и второй двухпороговые компараторы и первый - пятый компараторы фаз, входы первых компараторов амплитуд и двухпорогового компаратора и первые информационные входы первого и второго компараторов фаз всех каналов объединены и являются первым информационным ходом блока, первые входы вторых компаратора амплитуд и двухпорогового компаратора и первые информационные входы третьего и четвертого компараторов фаз всех каналов объединены и являются вторым информационным входом блока, тактовые входы всех компараторов фаз всех каналов объединены и являются управляющим входом блока, выход первого двухдорогового компаратора s -гo канала (s = ) соединен с управляющими входами первого и второго компараторов фаз того же канала, выход второго двухпорогового компаратора ff-ro канала подключены ко вторым информационным ходам третьего и четвертого компараторов фаз того же канала, первый информационный вход пятого компаратора фаз (7-го канала объединен со вторыми информационными входами первого и третьего компараторов фаз того же канала и является соответствующим прямым опорным входом блока, второй информационный вход пятого компаратора фаз (*то канала объединен со вторыми информационными входами второго и четвертого компараторов фаз того же. канала и является соответствующим инверсным опорным входом блока, выходы первого и второго компараторов амплитуд и второй выход пятого выходами первой группы выходов блока, первые выходы первого - пятого компараторов фаз каждого канала являются соответствующими выходами второй группы выходов блока.
6. Устройство по п.5, отличающееся тем, что компаратор фаз содержит первый и второй элементы сравнения, первый и второй транзисторы, конденсатор, первый - четвертый резисторы и первый и второй триггеры, входы синхронизации которых объединены и являются тактовым входом компаратора, установочный вход второго триггера является управляющим входом· компаратора, инвертирующий вход первого и неинвертирующий вход второго элементов сравнения объединены и являются первым информационным входом компаратора, неинвертирующий вход первого и инвертирующий вход второго элементов сравнения объединены и являются вторым информационным входом компаратора, выход первого элемента сравнения подключен к первым выводам конденсатора и первого и второго резисторов и эмиттеру первого транзистора, коллектор которого соединен с первым выводом четвертого резистора, коллектором второго транзистора и информационным входом второго триггера, выход которого является первым выходом компаратора, второй вывод второго резистора подключен к первому выводу третьего резистора и базам транзисторов, выход второго элемента сравнения соединен со вторым выводом третьего резистора, эмиттером второго транзистора и информационным входом первого триггера, прямой или инверсный выходы которого являются вторым выходом компаратора, вторые выводы первого и четвертого резисторов подключены к источнику питания.
Текст
Изобретение относится к области автоматики и вычислительной техники, предназначено для измерения углового положения вала в пространстве с высокой точностью в реальном масштабе времени. Известен способ измерения угла, принятый как наиболее близкий к заявляемому за прототип, заключающийся в формировании последовательности периодически изменяющихся кодовых сигналов, в преобразовании этой последовательности в пару ортогональных опорных колебаний напряжения, а затем в преобразовании их датчиком угла в синусоидальное колебание напряжения, фаза которого пропорциональна углу, прямой или дополнительный код которого получают при запоминании а памяти кодовых сигналов последовательности в моменты изменения знака выходного напряжения датчика угла с минуса на плюс или наоборот [2]. Известно устройство реализующее, такой способ (принятое как наиболее близкое к заявляемому за прототип), содержащее генератор тактовых импульсов, выход которого соединен со входом счетчика импульсов, младшие разряды выхода которого соединены с соответствующими разрядами' адресного входа блока памяти функций синуса и косинуса, а также информационного входа регистра, старший разряд выхода -соединен с первым информационным входом коммутатора, через инвертор - с его вторым информационным входом, а затем через коммутатор - со старшим разрядом информационного входа регистра, а также -со старшим разрядом адресного входа блока памяти функции синуса и косинуса, первый и второй выходы которого соединены со входом первого и второго цифроаналоговых преобразователей (ЦАП) соответственно, выходы которых соединены со входами фазовращателя (датчика угла), вы ход которого соединен со входом нуль-органа, выход которого через формирователь импульсов соединен с управляющими входами коммутатора и регистра, вы ход которого является выходом кода измеряемого угла устройства 2. К недостаткам такого способа и прототипа устройства относится низкое быстродействие (два измерения за период изменения опорного синусного или косинусного напряжения запитывающего датчик угла) и недостаточная точность измерения положения вала в пространстве, угловая погрешность измерения положения которого также не может быть меньше за технологическую погрешность допущенную при изготовлении датчика угла, даже невзирая на то, что он используется в режиме фазовращателя, т.е. суммарный эффект от сложения в нем двух ортогональных электромагнитных полей не приводит к существенному уменьшению помех типа "иголок" в его выходном сигнале и к компенсации систематических погрешностей приобретенных датчиком угла при его изготовлении. В основу изобретения поставлена задача создания способа измерения углового положения вала и устройства для его осуществления, в котором угловое положение вала в пространстве определяется путем решения тригонометрических уравнений вида sin q = sin(x + x0), где q - угловое положение вала в пространстве выраженное в радианах, x - переменная величина пропорциональная времени, xο - постоянная величина устанавливающая начало отсчета переменной x, а также уменьшено влияние случайных и систематических погрешностей вносимых датчиком угла в измеряемый угол и за счет этого с значительно меньшими затратами времени повышена точность его измерения. Поставленная задача решается тем, что в способе измерения углового положения вала включающем формирование последовательности периодически изменяющихся кодовых сигналов, преобразование этой последовательности в первую пару ортогональных опорных сигналов и запитку датчика угла переменным сигналом, согласно изобретению, преобразуют последовательность периодически изменяющихся кодов во вторую - N-to пары положительных и отрицательных гармоник для каждого ортогонального опорного сигнала первой пары с начальной фазой, пропорциональной номеру s= 2, N пары, запитку датчика угла осуществляют сигналами, образованными из периодически изменяющихся кодовых сигналов, формируют на выходах датчика угла К синусоидальных сигналов, мгновенные значения которых пропорциональны синусу угла q поворота вала, а начальные фазы пропорциональны номеру k= 1, K синусоидального сигнала, преобразуют эти синусоидальные сигналы в первый и второй ортогональные сигналы, мгновенные значения которых пропорциональны соответственно синусу и косинусу угла q, а амплитуды равны амплитудам опорных гармоник, определяют начальные фазы опорных гармоник в s-й паре по значению кодового сигнала, соответствующему равенству эти х гармоник, определяют промежуточное значение qпром угла q по значению кодового сигнала, соответствующему равенству измерительного сигнала, имеющего меньшее абсолютное значение, с соответствующей опорной гармоникой в s-й паре, определяют разность значения qпром и начальной фазы той опорной гармоники в s-й паре, по которой определено значение qпром , определяют по найденной разности и знаку измерительного сигнала, имеющего большее абсолютное значение, предварительное значение qпредв угла q, корректируют значение θ. в соответствии с выражениями: для первого ортогонального измерительного сигнала и -Ss Поставленная задача решается и благодаря тому, что, устройство для измерения углового положения вала, содержащее датчик угла, генератор тактовых импульсов, выход которого соединен со входом счетчика импульсов согласно изобретению отличается тем, что, в него введены блок оперативной памяти, выходной регистр, блок отображения информации, коммутатор, контроллер прерываний, вычислительный блок, блок формирования Фурье-координат, переключатели кода, преобразователь сигналов, синхронные детекторы, аналоговые сумматоры, фильтры и блок сравнения и управления, управляющий вход которого подключен к выходу генератора тактовых импульсов, выходы счетчика импульсов соединены с первой группой информационных входов блока оперативной памяти, выходы которого объединены с выходами коммутатора и подключены к информационным входам выходного регистра и к первым группам входов блока отображения информации и вычислительного блока, первая группа выходов которого соединена со второй группой входов блока отображения информации и группой адресных входов блока оперативной памяти, вторая группа выходов вычислительного блока подключена к первой группе входов контроллера прерываний, выходы которого соединены со второй группой входов вычислительного блока, управляющий выход которого подключен к управляющим входам блока отображения информации и выходного регистра, выходы которого являются выходами устройства, вход выбора выходного регистра, вход выбора коммутатора соединены с соответствующими разрядами первой группы выходов вычислительного блока, опорные входы первого - К-го синхронных детекторов объединены со входом преобразователя сигналов и подключены к Соответствующему разряду выходов счетчика импульсов, выход синхронизации которого соединен с входом запуска блока формирования Фурье-координат, первая - N-я группы управляющих входов которого подключены к выходам соответственно первого - N-ro переключателей кода, выходы блока формирования Фурье-координат соединены с группой опорных входов блока сравнения и управления, первая группа выходов которого подключена ко второй группе информационных входов блока оперативной памяти, первый К-й выходы датчика угла соединены с информационными входами соответственно первого - К-го синхронных детекторов, выходы которых подключены к соответствующим входам первого и второго аналоговых сумматоров, выход первого аналогового сумматора через первый фильтр соединен с первыми входами третьего и четвертого аналоговых сумматоров, выход второго аналогового сумматора через второй фильтр подключен ко вторым входам третьего и четвертого аналоговых сумматоров, выходы которых соединены с первым и вторым информационными входами блока сравнения и управления, вторая группа выходов которого подключена к третьей группе информационных входов блока оперативной памяти и второй группе входов контроллера прерываний, информационные входы коммутатора являются входами задания начала отсчета устройства. Блок формирования Фурье-координат содержит N формирователей Фурье-координат, счетные входы которых объединены и являются входом запуска блока, установочные входы каждого формирователя Фурьекоординат являются соответствующими группами управляющих входов блока, выход синхронизации первого формирователя Фурье-координат соединен со входами разрешения записи остальных формирователей Фурье-координат, вход разрешения записи первого формирователя Фурье-координат подключен к источнику постоянного напряжения, первый и второй информационные выходы каждого формирователя Фурьекоординат являются соответствующими выходами блока. Формирователь Фурье-координат содержит преобразователь кодов, ЦАП, фильтр, инвертирующий и неинвертирующий усилители и счетчик импульсов, счетный вход, вход разрешения записи и установочные входы которого являются одноименными входами формирователя, выход переполнения счетчика импульсов является выходом синхронизации формирователя, разрядные выходы счетчика импульсов через преобразователь кодов соединены со входами ЦАП. выход которого через фильтр подключен ко входам неинвертирующего и инвертирующего усилителей, выходы которых являются соответственно первым и вторым информационными выходами формирователя. Блок сравнения и управления состоит из N каналов, каждый из которых содержит первый и второй компараторы амплитуд, первый и второй двухпороговые компараторы и первый - пятый компараторы фаз, входьі первых компараторов амплитуд и двухпорогового компаратора и первые информационные входы первого и второго компаратора фаз всех каналов объединены и являются первым информационным входом блока, первые входы вторых компаратора амплитуд и двухпорогового компаратора и первые информационные входы третьего и четвертого компараторов фаз всех каналов объединены и являются вторым информационным входом блока, тактовые входы всех компараторов фаз всех каналов объединены и являются управляющим входом блока, выход первого двухпорогового компаратора s-го канала (s= 1, N ) соединен с управляющими входами первого и второго компараторов фаз того же канала, выход второго двухпорогового компаратора ого канала подключен к управляющим входам третьего и четвертого компараторов фаз того же канала, первый информационный вход пятого компаратора фаз s-го канала объединен со вторыми информационными входами первого и третьего компараторов фаз того же канала и является соответствующим прямым опорным входом блока, второй информационный вход пятого компаратора фаз s-го канала объединен со вторыми информационными входами второго и четвертого компараторов фаз того же канала и является соответствующим инверсным опорным входом блока, выходы первого и второго компараторов амплитуд и второй выход пятого компаратора фаз каждого канала являются соответствующими выходами первой группы выходов блока, первые выходы первого — пятого компараторов фаз каждого канала являются соответствующими выходами второй группы выходов блока. Компаратор фаз содержит первый и второй элементы сравнения, первый и второй транзисторы, конденсатор, первый-четвертый резисторы и первый и второй триггеры, входы синхронизации которых объединены и являются тактовым входом компаратора, установочный вход второго триггера является управляющим входом компаратора, инвертирующий вход первого и неинвертирующий вход второго элементов сравнения объединены и являются первым информационным входом компаратора, неинвертирующий вход первого и инвертирующий вход второго элементов сравнения объединены и являются вторым информационным входом компаратора, выход первого элемента сравнения подключен к первым выводам конденсатора и первого и второго резисторов и эмиттеру первого транзистора, коллектор которого соединен с первым выводом четвертого резистора, коллектором второго транзистора и информационным входом второго триггера, выход которого является первым выходом компаратора, второй вывод второго резистора подключен к первому выводу третьего резистора и базам транзисторов, выход второго элемента сравнения соединен со вторым выводом третьего резистора, эмиттером второго транзистора и информационным входом первого триггера, прямой или инверсный выходы которого являются вторым выходом компаратора, вторые выводы первого и четвертого резисторов подключены к источнику питания. В заявляемых способе и устройстве опорные напряжения используются не для запитки датчика угла (фазовращателя), а для образования переменных сигналов одинаковой амплитуды вида Y1(t)=Uosin(wt+ j), где Uo - амплитуда напряжения Y1(t), w- его частота, t - время, а j - фаза сигнала Υ1(t). Вы ходные сигналы датчика угла преобразуются в пару ортогональных сигналов вида Y2(q) = Uosin q и Y3(q) = Uocos q и, следовательно, определение кода угла сводится не к поиску корней тригонометрического уравнения sin (wt +q) = 0, а к решению 2N тригонометрических уравнений вида sin q = =sln(x + x0), чем и обеспечивается соответствие предложенного технического решения критерию "новизна". Атак как в предложенных методе и устройстве время измерения угла не зависит от формы и частоты напряжения запитывающего датчик угла, то это позволяет значительно уменьшить интервал времени измерения угла как за счет повышения частоты опорных сигналов, так и путем увеличения количества решаемых тригонометрических уравнений. Кроме того, случайные помехи влияющие на «точность измерения угла в устройстве удаляются фильтрами и интегрированием преобразованных напряжений выходных сигналов датчика угла, а внесенные им в измеряемый угол систематические погрешности - путем усреднения (суммирования) его К выходных преобразованных сигналов, что в конечном итоге и обеспечивает заявленному техническому решению по сравнению с известными методами более высокую точность измерения угла недоступную известным техническим решениям, а в совокупности - соответствие заявленных технических решений критериям "изобретательский уровень" и "промышленная применимость". Структурная схема устройства для измерения углового положения вала изображена на фиг.1, блока формирования Фурье-координат - на фиг.2; формирователя Фурье-координат - на фиг.3; блока сравнения и управления - на фиг.4; компаратора фаз - на фиг.5. Способ измерения углового положения вала заключается в формировании последовательности периодически изменяющихся кодовых сигналов, преобразовании этой последовательности в первую - N-ю пары положительных и отрицательных гармоник для каждого ортогонального опорного сигнала первой пары с начальной фазой, пропорциональной номеру s= (1,...,Ν) пары, запитке датчика угла сигналами образованными из периодически изменяющихся кодовых сигналов, формировании на выходах датчика угла К синусоидальных сигналов, мгновенные значения которых пропорциональны синусу угла θ поворота вала, а начальные фазы - номеру К = (1.....К) синусоидального сигнала, преобразовании этих син усоидальных сигналов в первый и второй ортогональные сигналы, мгновенные значения которых пропорциональны соответственно синусу и косинусу угла q, а амплитуды равны амплитудам опорных гармоник, определении начальных фаз опорных гармоник в s-й паре по значению кодового сигнала, соответствующему равенству этих гармоник, определении промежуточного значения qпром угла q по значению кодового сигнала, соответствующему равенству измерительного сигнала, имеющего меньшее абсолютное значение, с соответствующей опорной гармоникой в s-й паре, определении разности значения qпром и начальной фазы той опорной гармоники в s-й паре, по которой определено значение qпром · определении по найденной разности и знаку измерительного сигнала, имеющего большее абсолютное значение, предварительного значения qпредв угла q, корректировании значения qпредв в соответствии с выражениями: для первого ортогонального измерительного сигнала и +Ss Устройство для измерения углового положения вала (фиг. 1) содержит датчик 1 угла, генератор 2 тактовых импульсов, счетчик 3 импульсов, блок 4 оперативной памяти, выходной регистр 5, блок 6 отображения информации, коммутатор 7, контроллер 8 прерываний, вычислительный блок 9, блок 10 формирования Фурье-координат, N переключателей 1 1.n кода /n = (1,.,.,Ν)/, преобразователь 12 сигналов, К синхронных детекторов 13.k/k=(1,...,K)/, четыре аналоговых сумматоров 14-17, первый - 14, второй - 15, третий - 16 и четвертый - 17, два фильтра 18 и 19, первый - 18 и второй - 19, а также блок 20 сравнения и управления. Выход генератора 2 тактовых импульсов соединен со входом счетчика 3 импульсов и управляющим входом блока 20 сравнения и управления, выходы счетчика 3 импульсов соединены с первой группой информационных входов блока 4 оперативной памяти, выходы которого объединены с выходами коммутатора 7 и подключены к информационным входам выходного регистра 5 и к первым группам входов блока 6 отображения информации и вычислительного блока 9, первая группа выходов которого соединена со второй группой входов блока 6 отображения информации и группой адресных входов бока 4 оперативной памяти, вторая группа выходов вычислительного блока 9 подключена к первой группе входов контроллера 8 прерываний, выходы которого соединены со второй группой входов вычислительного блока 9, управляющий выход которого подключен к управляющим входам блока 6 отображения информации и выходного регистра 5, выходы которого являются выходами устройства, вход выбора выходного регистра 5, вход выбора коммутатора 7 соединены с соответствующими разрядами первой группы выходов вычислительного блока 9, опорные входы первого - К-го синхронных детекторов 13k объединены co входом преобразователя 12 сигналов и подключены κ соответствующему разряду выходов счетчика 3 импульсов, выход синхронизации которого соединен со входом запуска блока 10 формирования Фурье-координат, первая - N-я группы управляющих входов которого подключены к выходам соответственно первого - N-гo переключателей 11.η кода, выходы блока 10 формирования Фурье-координат соединены с группой опорных входов блока 20 сравнения и управления, первая группа выходов которого подключена ко второй группе информационных входов блока 4 оперативной памяти, первый -К-й выходы датчика 1 угла соединены с информационными входами соответственно первого - К-го синхронных детекторов 13.к, выходы которых подключены к соответствующим входам аналоговых сумматоров 14 и 15, выход аналогового сумматора 14 через фильтр 18 соединен с первыми входами аналоговых сумматоров 16 и 17, выход аналогового сумматора 15 через фильтр 19 подключен ко вторым входам аналоговых сумматоров 16 и 17, выходы которых соединены с первым и вторым информационными входами блока сравнения и управления, вторая группа выходов которого подключена к третьей группе информационных входов блока 4 оперативной памяти и второй группе входов контроллера 8 прерываний, информационные входы коммутатора 7 являются входами задания начала отсчета угла устройства. Блок формирования Фурье-координат (фиг.2) содержит N формирователей 21.n Фурье-координат (n = (1.....Ν)), счетные входы которых объединены и являются входом 22 запуска блока, установочные входы каждого формирователя 21.η являются соответствующими группами управляющих входов 23.п блока, выход синхронизации первого формирователя 21.1 Фурье-координат соединен со входами разрешения записи остальных формирователей 21.п Фурье-координат (n={2.....Ν)), вход разрешения записи формирователя 21.1 Фурье-координат подключен к источнику 24 постоянного напряжения, первый и второй информационные выходы каждого формирователя 21.n Фурье-координат, объединенные в соответствующие n-е пары выходов 25.n и 26.n, являются выходами 25 и 26 блока. Формирователь Фурье-координат (фиг.3) содержит счетчик 27 импульсов, преобразователь 28 кодов, ЦАП 29, фильтр 30, а также инвертирующий и неинвертирующий усилители 31 и 32. Счетный вход, вход разрешения записи и установочные входы счетчика 27 импульсов являются одноименными входами формирователя, разрядные выходы счетчика 27 импульсов через преобразователь 28 кодов соединены со входами ЦАП 29, выход которого через фильтр 30 подключен ко входам неинвертирующего и инвертирующего усилителей 31 и 32, выходы которых являются соответстренно первым и вторым информационными выходами формирователя. Блок сравнения и управления (фиг.4) состоит из N каналов 20. s, каждый из которых (s = (1,.,.,Ν)) содержит компараторы 33 и 34 амплитуд, первый - 33, а второй - 34, двух-пороговые компараторы 35 и 36, первый -35, а. второй 36 и пять компараторов 37-41 фаз, первый - 37, второй - 38,..., пятый - 41. Входы компараторов 33 амплитуд, двух-пороговых компараторов 35 и первые информационные входы компараторов 37, 38 фаз всех каналов 20, s объединены и являются первым информационным входом 42 блока, входы компараторов 34 амплитуд, двухпороговых компараторов 36 и первые информационные входы компараторов 39, 40 фаз всех каналов 20. σ объединены и являются вторым информационным входом 43 блока, тактовые входы компараторов 37-41 фаз всех каналов 20. объединены и являются управляющим входом 44 блока, в каждом s -м канале 20. s вы ход двухпорогового компаратора 35 соединен с управляющими входами компараторов 37 и 38 фаз, а выход двухпорогового компаратора 36 - с управляющими входами компараторов 39 и 40 фаз того же канала 20. σ, первый информационный вход компаратора 41 фаз в каждом канале 20. s объединен со вторыми информационными входами компараторов 37 и 39 фаз и является соответствующим прямым опорным входом 45. σ блока, второй информационный вход компаратора 41 фаз объединенный в том же канале 20. s со вторыми информационными входами компараторов 38 и 40 фаз – соответствующим инверсным опорным входом 45. `s блока (`s = - s), вы ходы компараторов 33 и 34 амплитуд и второй выход компаратора 41 фаз каждого канала 20. s являются соответствующими выходами первой группы выходов 46 блока, первые выходы компараторов 37-41 фаз каждого канала 20. σ являются соответствующими выходами второй группы выходов 47 блока. Компаратор фаз (фиг.5) содержит элементы 48 и 49 сравнения (компараторы), первый - 48, а второй - 49, транзисторы 50 и 51, первый - 50, а второй — 51, первый -четвертый резисторы 52-55, конденсатор 56 и триггеры 57 и 58, первый - 57, а второй - 58. Входы синхронизации триггеров 57, 58 объединены и являются тактовым входом 59 компаратора, установочный вход триггера 58 является управляющим входом 61 компаратора, инвертирующий вход элемента 48 сравнения и неинвертирующий вход элемента 49 сравнения объединены и являются первым информационным входом 60 компаратора, неинвертирующий вход элемента 48 сравнения и инвертирующий вход элемента 49 сравнения объединены и являются вторым информационным входом 62 компаратора, выход элемента 48 сравнения подключен к первым выводам резисторов 52, 53 и конденсатора 56, а также к эмиттеру транзистора 50, коллектор которого соединен с первым выводом резистора 55, коллектором транзистора 51 и информационным входом триггера 58, выход которого является первым выходом 63 компаратора, второй вывод резистора 53 подключен к первому выводу резистора 54 и базам транзисторов 50 и 51, второй вывод конденсатора 56 соединен с шиной потенциала нуля, а вторые выводы резисторов 52 и 55 подключены к источнику питания Е, выход элемента 49 сравнения соединен со вторым выводом резистора 54, эмиттером транзистора 51 и информационным входом триггера 57, прямой или инверсный выходы которого являются вторым выходом 64 компаратора. Устройство для измерения углового положения вала в пространстве работает следующим образом. При непрерывной работе 1-разрядного, например, двоичного счетчика 3 импульсов на его выходах образуются сигналы периодически изменяющихся кодов модуля Хр = =(аі а(i-1)...аі...а 2 а1)р где Ρ - основание позиционной системы счисления чисел определяемое типом задействованных в устройстве счетчиков импульсов, в рассматриваемом случае Р=2; аі -- Р-ичная цифра на позиции i-гo разряда модуля Xp=(ai...a2 a1)p числа X, величина которой совпадает с одним числом из множества целых чисел от н уля до (Р-1), і =(1.....I), в зависимости от величины которого те или иные ячейки блока 4 оперативной памяти в течение интервала времени длительностью t= 1 /pw, где w частота тактовых импульсов генератора 2, подготавливаются к занесению в них той или иной устойчивой информации об измеряемом угле, под которым расположен в пространстве вал датчика 1. При этом датчик 1 угла запитывается напряжением переменного тока, вида где Uд вх - периодическая последовательность биполярных прямоугольных импульсов на выходе преобразователя 12 сигналов; a i - эквивалент двоичной цифры на выходе 1-го разряда счетчика 3 импульсов, число нуль или единица. Сигнал Uд вх. датчиков 1 угла преобразуется в его К вы ходных пульсирующи х напряжений, вида: где h k- коэффициент передачи входного напряжения датчика 1 угла на его k-й вы ход, угловое начальное смещение по фазе, вносимое k-м каналом датчика 1 угла в измеряемый угол q, конструктивная постоянная величина, что не обязательно. Из приведенных выражений видно, что погрешности в измеряемый угол q вносятся отклонениями параметров от постоянных величин как через модуль r е =eU0, так и через фазы je = eq ο таким образом сформированных сигналов (1,2)Ua.c x (q / eU0, eq ο). но при этом взаимное влияние параметров (k)q0 на их модули и фазы значительно меньше, чем одного из них. А т.к. систематическую погрешность измерения угла q можно отнести к величинам (k)q0, то эта погрешность обусловленная неточным изготовлением датчика угла в таком случае значительно уменьшена, что позволяет как бы применить в устройстве "идеальный" датчик 1 угла. Случайные же помехи (погрешности), наведенные различными электромагнитными" полями в устройстве и бросками токов в шинах питания, из сигналов (1,2)Ua.c (q/eUo, eq o) удаляются путем их интегрирования фильтрами 18 и 19 с последующим алгебраическим суммированием аналоговыми сумматорами 16 и 17, образуя на их вы ходах первый и второй измерительные ортогональные сигналы, вида: где Uo - модуль амплитуды сигналов Y. 1(q /Uo, qО) и Υ2(q /Uo, q o) q - аргумент, а q 0 - и х одинаковые фазы. При подсчете прямоугольных импульсов с одного из выходов счетчика 3 подаваемых и на вход запуска блока 10 формирования Фурье-координат, на выходах последнего одновременно образуется 2Ν опар синусных колебаний напряжения, вида что на протяжении периода изменения одного из них при их сравнении в блоке 20 с первым или вторым "постоянным" напряжением Y1(q /U0 , q 0) или Y2(q /UO, q 0) позволяет измерение угла q свести к определению 4Ν корней с 2Ν тригонометрических уравнений: В каждом s-ом канале 20. s блока 20 сравнения и управления (фиг.4) компаратором 33 амплитуд определяется знак +S или -S (плюс или минус) сигнала Y1(q /U0, q 0), а компаратором 34 амплитуд - знак +С или С (плюс или минус) "постоянного" напряжения Y2(q /U0, q) двухпороговым компаратором 35 проверяется условие: при выполнении которого разрешается работа компараторов 37, 38 фаз: двухпороговым компаратором 36 проверяется выполнение условия: при нарушении которого блокируется работа компараторов 39,40 фаз, а компаратором 41 фаз определяются моменты изменения знаков +Ss или -Ss (плюс или минус) положительных и отрицательных гармоник в их 20 сравнения и управления передаются, например, "нулями" и "единицами" ("нуль" -плюс, а "единица" минус), работа компараторов 37, 38 или 39, 40 разрешается, например, "нулями" двухпороговых компараторов 35 и 36, а запрещается "единицами" их выходных сигналов. Сигналы Запись фаз компараторов 37, 38 или 39, 40 и Запись начальных фаз компараторов 41 в соответствующие разряды выхода 47 блока 20 сравнения и управления передаются прямоугольными импульсами напряжений, активные уровни которых по длине не меньшие, чем период следования тактовых импульсов генератора 2. Синхронизация же работы компараторов 37-41 во всех каналах блока 20 сравнения и управления осуществляется тактовыми импульсами генератора 2, которые с его выхода поступают и на управляющий вход 44 блока 20 сравнения и управления. Затем каждый раз. при равенстве опорных сигналов каждой s-пары первому или второму измерительному сигналу Y1(q /U0 , q 0) или Y2(q /U0 , q 0) с меньшей абсолютной величиной напряжения, сигналом Запись фазы, соответствующего этому моменту, в младшие разряды ячеек блока 4 оперативной памяти осуществляется запись установивши хся значений кода, например, 'Xp= (' ai.,.'а2 ‘a1)Р хранящегося в этот момент в течении времени t на выхода х сче тчика 3 импульсов и соответствующего в этот момент времени числовому эквиваленту q0) с большей абсолютной величиной напряжения. Этим же сигналом Запись фазы одновременно через контроллер 8 прерываний в вычислительный блок 9 посылается сигнал Запрос на обслуживание тех ячеек блока 4 оперативной памяти, в которых перед его формированием и была запомнена информация. А т.к. в рассматриваемом случае сигнал Запись фазы однозначно связан. с местоположением (или, что то же самое) с адресом) ячеек блока 4 оперативной памяти, под воздействием которого в них была запомнена информация, то под управлением программы вычислительный блок 9 по номеру соответствующего ему Запроса на обслуживание начинает ее снова или прекращает выполнение текущей программы, сбрасывает "флажок" контроллера 8 прерываний вызвавшего этот запрос в исходное состояние и под управлением той же программы по идентифицированному в нем адресу принимает информацию в свои внутренние регистры общего назначения с блока 4 оперативной памяти, а дальше' продолжает или завершает выполнение текущей программы и по ее окончании снова начинает выполнение нового цикла программы. В момент равенства мгновенного значения напряжения опорного сигнала Ys(х/U0, sx0), s-й пары мгновенному значению напряжения колебания Y `s (x/U0,. sХ0) или, что то же самое, например, в момент изменения знака сигнала Υs (x/Uo, sХ0) с минуса на плюс и, наоборот) сигналом Запись начальной фазы, соответствующего этому моменту времени, в младшие разряды ячеек блока 4 оперативной памяти указанных этим сигналом осуществляется как и раньше запись установивши хся значений кода модуля, например, Хр = ("аі..."а2 "а1)р с те х же выходов счетчика 3 импульсов и соответствующего в это т момент времени числовому эквиваленту s баний напряжений х0) численным значением их начальной фазы является параметр sх0, а на втором полупериоде (m=2) - параметр Однако этот факт аж никак не влияет на ход вычислений осуществляемых блоком 9, т.к. простой заменой индекса а номера m=1 на номер m=2 и, наоборот, определение корней решаемых тригонометрических уравнений снова сводится к интервалу [0, p], на котором они и в этом случае вычисляются по тем же правилам (формулам). Вычислительным блоком 9 на интервале [0, p] угла в радианной мере или, что то же самое, на его численном интервале [0,1/2] сначала определяется путем усреднения с предыдущим значением числовой эквивалент s х0 начальной фазы колебаний s s-й пары, затем числовое значение х0 являющегося действительным или мнимым корнем решаемого в данный момент тригонометрического уравнения, а потом -соответствующая ему пара знаковых сигналов: где Хо - численный эквивалент заранее известного начального отсчета q0 угла q, 0 ai – P-ичная цифра на позиции 1-го разряда заранее установленного в коммутаторе 7 кода модуля (Х0)р = (0ai...oa2 oa1) p, величина которой в общем случае совпадает с одним числом из множества целых чисел от нуля до (P-1), і = (1,.....,i), с последующим его суммированием с кодом модуля числа хк . После чего в блок 6 отображения информации из вычислительного блока 9 пересылается информация об измеренном угле. q= (qк + q0)< выраженная как в радианной мере, так и в численной. На этом и завершается работа вычислительного блока 9 с последующим входом его в режим Ожидания до получения следующего Запроса на обслуживание. В блоке формирования Фурье-координат (фиг.2) формирователь 21.1 Фурье-координат работает в асинхронном режиме, а остальные - в синхронном, т.к. на их входы разрешения записи, один раз за период Тфг изменения положительных и отрицательных гармоник генерируемых блоком, из формирователя 21.1 Фурье-координат подается сигнал Установки начальных фаз генерируемых ими колебаний, и, одновременно, на счетные входы всех формирователей 21.n Фурье-координат со входа 22 запуска блока - тактовые импульсы с периодом следования Тсл =Тфг /РМ где Μ - натуральное число, определяемое количеством ступенек в аппооксимирующи х функциях Yn(m) ступенек синтезируемых в блоке колебаний, коды задания начальных фаз которых подаются на установочные входы каждого формирователя 21.n Фурье-координат /n = -(1.....Ν), n=s/ с соответствующего ему входа 23.n блока. Каждый формирователь Фурье-координат (фиг.3) работает следующим образом. При работе счетчика 27 импульсов с информационной емкостью Q = РM на его информационном выходе периодически образуется с периодом следования Тф г изменяющийся во времени код М-разрядного модуля (m)р = (cM... c 2 c1) p также дискретно изменяющегося во времени (по величине) параметра m, где cm - Р-ичная цифра на позиции n -гo разряда модуля (m)р = (cM... c 2 c1)p числа m, величина которой совпадает с одним числом из множества целых чисел от н уля до (Р-1), n=(1,·...,Μ), который поступая на адресные входы преобразователя 28 кодов образует на его выходах код аппроксимирующей функции а во времени на выходе ЦАП 29 - ступенчатый синусоидальной сигнал с амплитудой Во и основной частотой w0·= =2p/Рм · Тсл колебания его напряжения. Фильтром 30 нижних частот с частотой среза wcp = 2w0 из выходного ступенчатого напряжения ЦАП 29 выделяется сигнал основной гармоники затем инвертирующим и неинвертирующими усилителями 31, 32 преобразуемый в пару положительных и от с одинаковыми модулями Uo амплитуд и начальными фазами х0 колебаний. При этом общая начальная фаза х0 таким образом генерируемой пары гармоник задается кодом М-разрядного модуля (0c)р = (0cM... 0 c2 0 c1) p числа °c подаваемого на установочные входы счетчика 27 импульсов, подтверждая или изменяя его состояние фронтом очередного счетного импульса с момента перехода в активное состояние сигнала Разрешение записи информации подаваемого на соответствующий вход формователя. Компаратор фаз (фиг.5) сравниваемых напряжений работает следующим образом. На вход 59 компаратора фаз подаются импульсы синхронизации, на входы 60 и 62 - сравниваемые напряжения (одно из которых может быть постоянным), а на вход 61 -сигнал Разрешение работы. Пусть при превышении первого сравниваемого напряжения над вторым элемент 48 сравнения находится в состоянии высокого уровня, а элемент 49 сравнения - в состоянии низкого. В этом случае транзистор 50' закрыт.отрицательным напряжением, а транзистор 51 открыт положительным напряжением приложенными к их р-переходам эмиттер-база, что на D-входах триггеров 57 и 58 вызывает напряжение низкого уровня. До тех пор пока на D-входах триггеров 57, 58 будут напряжения низкого уровня, синхроимпульсы поступающие на их С-входы удерживают триггеры 57 и 58 в основных состояниях, например, в состояниях низкого уровня. Если в некоторый момент времени второе сравниваемое напряжение превысит первое, то элемент 49 сравнения установится в состояние высокого уровня, а элемент 48 сравнения с некоторой задержкой во времени - в состояние низкого уровня. Это вызывает одинаковые потенциалы высокого уровня на эмиттерах и базах транзисторов 50 и 51, которые оба на время разряда конденсатора 56 до порогового уровня окажутся в закрытых состояниях, и, следовательно, повторяя напряжения на своих D-входах, триггеры 57 и 58 установятся по фронту первого же импульса синхронизации в состояния высокого уровня, которое для триггера 58 продлится до момента разряда конденсатора 56 до порогового уровня, т.к. при этом откроется транзистор 50. С момента превышения первого сравниваемого напряжения над вторым все повторится аналогично первому случаю с той лишь разницей, что на время заряда конденсатора 56 до порогового уровня транзисторы 50 и 51 окажутся оба закрытыми, но уже при потенциалах низкого уровня на их эмиттерах и базах. Триггер 57 установится в исходное состояние, а на выходе триггера 58 снова сформируется импульс Запись фазы (Начальной фазы),
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of angle shaft position and device for its realization
Автори англійськоюKovbasa Anatolii Mykolaiovych
Назва патенту російськоюСпособ измерения углового положения вала и устройство для его осуществления
Автори російськоюКовбаса Анатолий Николаевич
МПК / Мітки
Мітки: кутового, вала, пристрій, спосіб, положення, здійснення, вимірювання
Код посилання
<a href="https://ua.patents.su/21-19848-sposib-vimiryuvannya-kutovogo-polozhennya-vala-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання кутового положення вала і пристрій для його здійснення</a>
Пристрій для вимірювання фазового зсуву
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Токовенко Степан Омелянович, Свідлер Ігор Давидович
МПК: G01R 25/00
Мітки: вимірювання, фазового, пристрій, зсуву
Формула / Реферат:
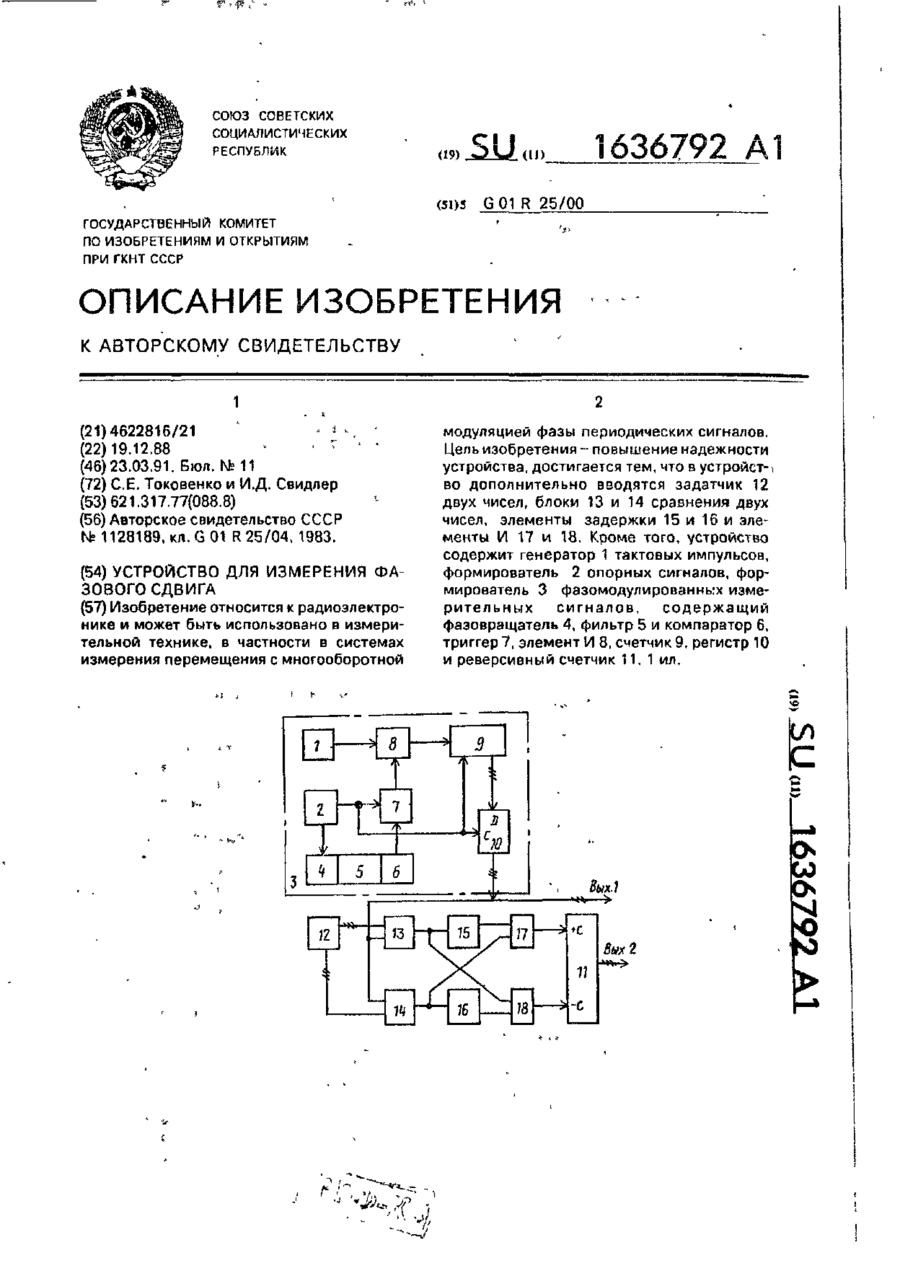
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Пристрій для вимірювання переміщень
Номер патенту: 454
Опубліковано: 30.04.1993
Автори: Виговський Олександр Володимирович, Тализін Григорій Володимирович, Вдовиченко Валерій Іванович, Оснач Віктор Григорович, Токовенко Степан Омелянович, Свідлер Ігор Давидович
МПК: H03M 1/50
Мітки: вимірювання, пристрій, переміщень
Формула / Реферат:
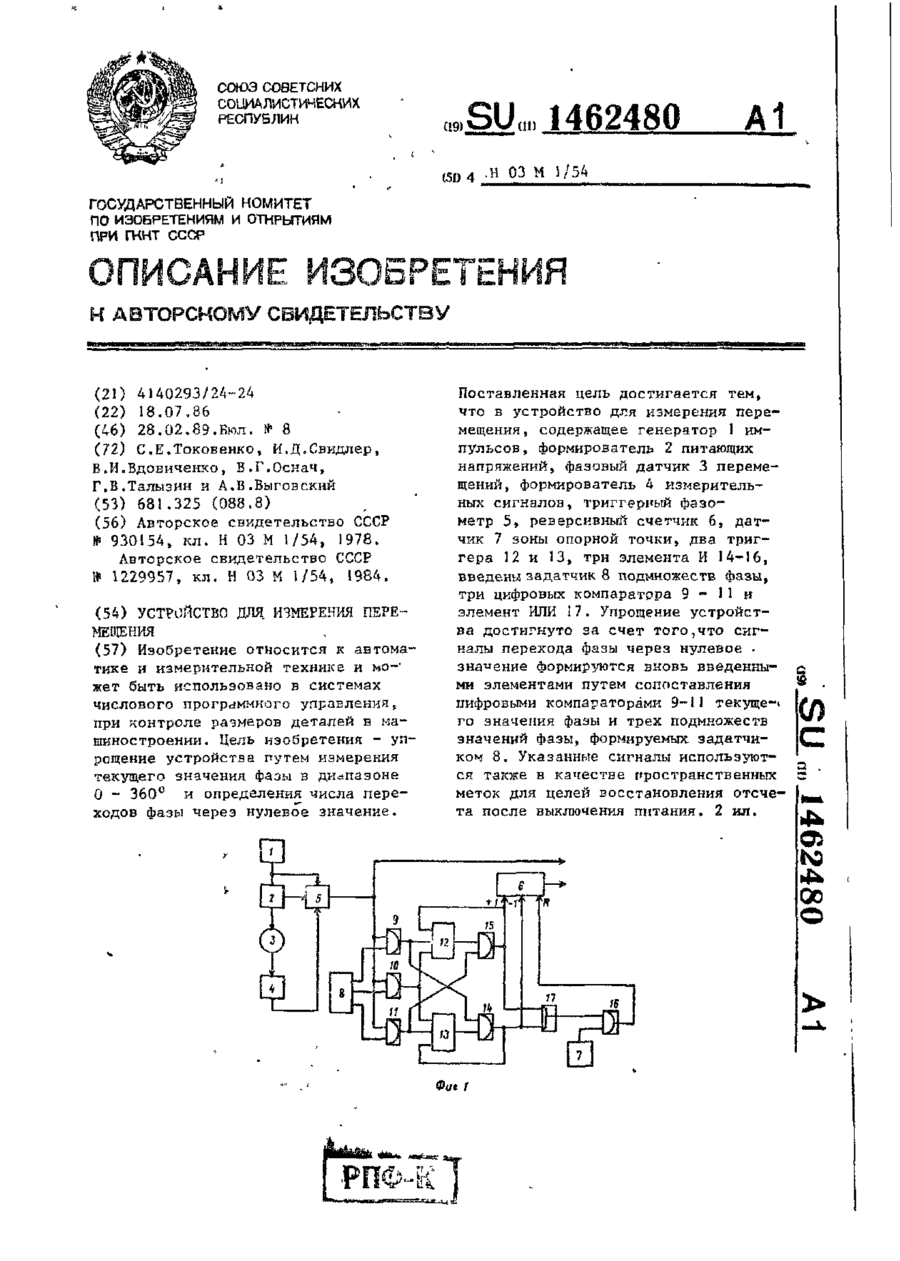
Формула изобретенияУстройство для измерения перемещения, содержащее генератор импульсов, выход которого соединен с входом формирователя питающих напряжений и с первым входом триггерного фазометра, второй вход которого подключен к первому выходу формирователя питающих напряжений, второй выход которого соединен с входом фазового датчика перемещений, выход которого через формирователь измерительных сигналов подключен к третьему входу...
Спосіб контролю щільності твердої фази суспензій та пристрій для його здійснення
Номер патенту: 6266
Опубліковано: 29.12.1994
Автори: Моркун Володимир Станіславович, Потапов Віктор Миколайович
МПК: G01N 29/00
Мітки: фазі, щільності, контролю, твердої, спосіб, пристрій, суспензій, здійснення
Формула / Реферат:
1. Способ контроля плотности твердой фазы суспензий, заключающийся в том, что в исследуемую среду излучают ультразвуковую волну и измеряют ее амплитуду, отличающийся тем, что, с целью повышения точности, используют ультразвуковую волну Лэмба, которую генерируют на границе раздела исследуемой суспензии с заключающей ее емкостью, пропускают через исследуемую среду g-излучение и измеряют амплитуду ультразвуковой волны Лэмба и интенсивность...
Пристрій для вимірювання часових інтервалів
Номер патенту: 16804
Опубліковано: 29.08.1997
Автор: Бантюков Євген Миколайович
МПК: G04F 10/00
Мітки: пристрій, інтервалів, часових, вимірювання
Формула / Реферат:
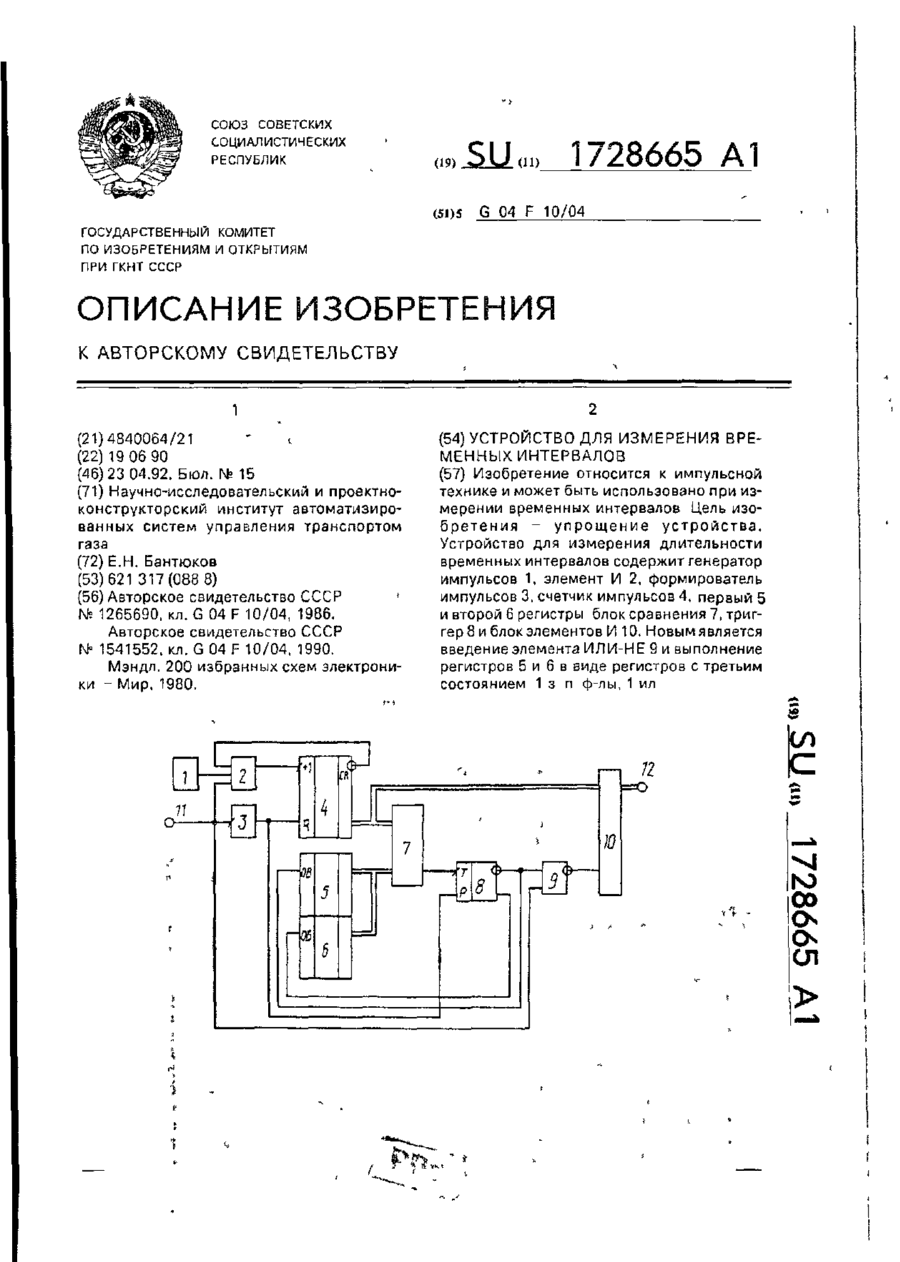
1. Устройство для измерения временных интервалов, содержащее генератор импульсов, элемент И, к первому входу которого подключен выход генератора импульсов, формирователь им-пульсов, счетчик импульсов, суммирующий вход которого соединен с выходом элемента И, первый и второй регистры, блок сравнения, к вторым входам которого подключены первый регистр, триггер, первый вход которого соединен с выходом блока сравнения, блок элементов И,...
Спосіб контролю чутливості приймача та пристрій для його здійснення
Номер патенту: 12656
Опубліковано: 28.02.1997
Автори: Бернякович Олександр Вікторович, Качанова Світлана Павлівна, Івашура Геннадій Володимирович
Мітки: пристрій, чутливості, спосіб, контролю, приймача, здійснення
Текст:
...соединен с 40 вторым выходом разветвителя, второй модулятор и второй детектор, коммутатор, первый выход которого соединен с модулирующим входом генератора шума, последовательно соединенные апалого-цифроАЪ вой преобразователь, первый вход которого соединен с выходом первого детектора, блок памяти, цифроаналоювый преобразователь и ключ, выход которого соединен с первым входом порогового блока, выход которого соеди 12 65 С нен с входом...
Попередній патент: Склад для лікування пародонтиту
Наступний патент: Спосіб обробки зерна сої
Випадковий патент: Спосіб вагового дозування порцій матеріалу