Пристрій для вимірювання параметрів транспортних засобів
Номер патенту: 62015
Опубліковано: 10.08.2011
Автори: Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Ярута Антон Миколайович, Левтеров Андрій Іванович
Формула / Реферат
Пристрій для вимірювання параметрів транспортних засобів, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод, блок дефлекторів з підключеним до нього блоком керування дефлекторами та передавальну оптику, послідовно підключені приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, формувачі імпульсів та лічильники імпульсів мод променів і електронно-цифрову обчислювальну машину (ЕЦОМ), яка підключена до блока відображення інформації, який відрізняється тим, що додатково введені порогові пристрої, які підключені до тих же виходів формувачів імпульсів променевих каналів, що і входи лічильників імпульсів мод променів, виходи порогових пристроїв підключені через елемент АБО до входу селектора подовжніх мод і до других входів лічильників імпульсів мод променів, виходи яких підключені до відповідних входів ЕЦОМ, канал вимірювання відстані, що містить послідовно підключені до виходу селектора подовжніх мод формувача імпульсів моди відстані і лічильник імпульсів відстані, вихід якого підключений до блока керування дефлекторів та ЕЦОМ, доплерівський канал вимірювання радіальної швидкості, що містить послідовно підключені резонансний підсилювач моди швидкості, двократний перетворювач частоти, формувач імпульсів радіальної швидкості, а також пристрій обчислювання радіальної швидкості, що підключений до ЕЦОМ.
Текст
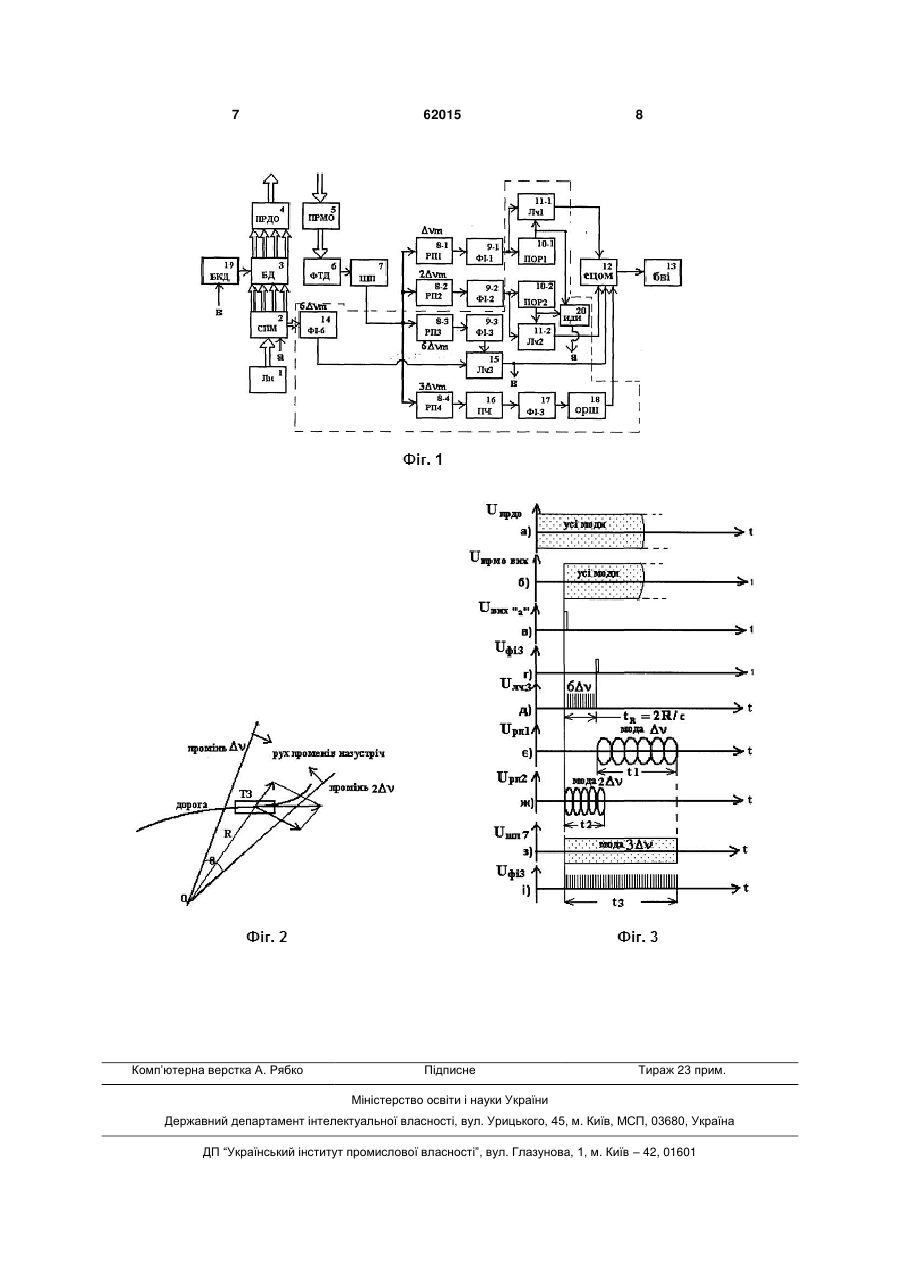
Пристрій для вимірювання параметрів транспортних засобів, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод, блок дефлекторів з підключеним до нього блоком керування дефлекторами та передавальну оптику, послідовно підключені приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, формувачі імпульсів та лічильники імпульсів мод променів і електронно-цифрову обчислювальну машину (ЕЦОМ), яка підключена до U 2 (19) 1 3 ження вимірювальної інформації по каналах кутових швидкостей , (Деклараційний патент UA №63285 А. Бюл. №1 від 15.01.2004). Цей пристрій є найбільш близьким до пристрою, що заявляється, тому обраний як найближчий аналог. Недоліком найближчого аналога є недостатні функціональні можливості та точність виміру параметрів транспортних засобів за рахунок того, що ширина діаграми спрямованості (апертура променя) на малих відстанях у тангенціальній площині руху транспортного засобу менша за розміром ніж розмір транспортного засобу, а штучне розширення апертури променів приведе до суттєвого зниження енергетичного потенціалу пристрою та його розрізняючої здатності. Крім того, більший розмір апертури променів призведе до відбиття променів з сусідніх транспортних засобів у потоці. І, на кінець, час вимірів значно збільшиться, що зробить неможливим оперативно вимірювати параметри транспортних засобів. Крім того, у зв'язку з тим, що розмір транспортного засобу невідомий, то використання частотно-часового методу для виміру параметрів транспортних засобів, а саме - радіальної та тангенціальної швидкостей транспортних засобів, кута руху транспортного засобу відносно осьової лінії дороги, буде неможливий. В основу корисної моделі поставлена задача розширення функціональної можливості і точності, за рахунок можливості виміру відстані до транспортного засобу, радіальної та тангенціальної швидкостей, кута руху відносно осьової лінії дороги та довжини транспортного засобу. Ці можливості досягаються за рахунок використання ефекту зміни відбитого від транспортного засобу сигналу в залежності від розмірів та направленості відносної швидкості транспортного засобу і лазерних променів пристрою, що використовує частотночасовий метод вимірювань. Поставлена задача вирішується тим, що у відомий пристрій, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод, блок дефлекторів з підключеним до нього блоком керування дефлекторами та передавальну оптику, послідовно підключені приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, формувачі імпульсів та лічильники імпульсів мод променів і ЕЦОМ, яка підключена до блока відображення інформації, відповідно до корисної моделі додатково введені порогові пристрої, що підключені до тих же виходів формувачів імпульсів променевих каналів, що і входи лічильників імпульсів мод променів, виходи порогових пристроїв підключені через елемент АБО до входу селектора подовжніх мод і до других входів лічильників імпульсів мод променів, виходи яких підключені до відповідних входів ЕЦОМ, канал вимірювання відстані, що містить послідовно підключені до виходу селектора подовжніх мод формувач імпульсів моди відстані і лічильник імпульсів відстані, вихід якого підключений до блока керування дефлекторів та ЕЦОМ, доплерівський канал вимірювання радіальної швидкості, що містить послідовно підключені резонансний підсилювач моди швидкості, двократний перетворювач частоти, формувач імпульсів радіальної швидкості, 62015 4 а також пристрій обчислювання радіальної швидкості, що підключений до ЕЦОМ. На Фіг.1 приведена структурна схема пристрою для вимірювання параметрів транспортних засобів. На Фіг.2 приведена схема використання корисної моделі. На Фіг.3 приведені частотні та часові співвідношення сигналів та принципи використання каналів у вигляді форми сигналів на відповідних елементах структурної схеми пристрою, наведеного на Фіг.1. На Фіг.1 зображено: лазер 1 з накачкою, селектор 2 подовжніх мод з входом «а» для включення випромінювання сигналу зондування відстані на моді 6m по сигналу виявлення відбиття променя m від транспортного засобу, блок 3 дефлекторів для зустрічного сканування двох променів, "підфарбованих" своїми модами, передавальна оптика 4, приймальна оптика 5, фотодетектор 6, широкосмуговий підсилювач 7, резонансні підсилювачі 8-1, 82 своїх мод каналів променів, що рухаються, каналу 8-3 відстані і каналу 8-4 радіальної швидкості, формувачі 9-1, 9-2 імпульсів променів, формувач 9-3 імпульсу приходу сигналу відстані, порогові пристрої 10-1 та 10-2 каналів променів, лічильники 11-1 та 11-2 часу відбиття променів, ЕЦОМ 12, блок 13 відображення інформації, формувач 14 імпульсів, лічильник 15 імпульсів відстані, подвійний перетворювач 16 частоти, формувач 17 імпульсів доплерівської частоти з підставкою, обчислювач 18 радіальної швидкості, блок 19 керування дефлекторами з входом «в» та елемент АБО 20, причому лазер 1 з накачкою, послідовно підключений через селектор 2 подовжніх мод та блок дефлекторів 3 до передавальної оптики 4, а приймальна оптика 5 підключена до входу фотодетектора 6, вихід якого підключений через широкосмуговий підсилювач 7 до резонансних підсилювачів 8-1, 8-2 двох каналів променів, до резонансного підсилювача 8-3 моди відстані та резонансного підсилювача 8-4 моди швидкості, виходи резонансних підсилювачів 8-1, 8-2 двох каналів променів підключені через відповідні формувачі 9-1 та 9-2 імпульсів до відповідних порогових пристроїв 10-1 та 10-2 каналів променів та лічильників 11-1 та 112 імпульсів мод променів, а вихід резонансного підсилювача 8-3 моди відстані через формувач 9-3 імпульсів підключений до входу лічильника 15 імпульсів відстані, виходи лічильників 11-1, 11-2 та 15 імпульсів підключені до ЕЦОМ 12, а вихід останньої - до блока 13 відображення інформації, порогові пристрої 10-1 та 10-2 через елемент АБО 20 підключені до входу «а» селектора 2 подовжніх мод, а вихід лічильника 15 імпульсів каналу вимірювання відстані - до входу «в» блока 19 керування дефлекторами, вихід формувача 14 імпульсів підключений до другого входу лічильника 15 імпульсів відстані, вихід резонансного підсилювача 8-4 моди швидкості підключений через подвійний перетворювач 16 частоти, формувач 17 імпульсів доплерівської частоти з підставкою до обчислювача 18 радіальної швидкості, вихід якого підключений до ЕЦОМ 12, другий вихід селектора 2 подовжніх мод підключений до формувача 14 5 імпульсів, а вихід блока 19 керування діапазону дефлекторів - до входу блока 3 дефлекторів для зустрічного сканування двох променів. Принцип дії пристрою для вимірювання параметрів транспортних потоків полягає у наступному. Стаціонарний або портативний пристрій націлюється на видимий транспортний засіб і натискається кнопка включення. На виході передавальної оптики 4 одночасно випромінюються моди m, 2m променів та вимірювача радіальної швидкості 3m (Фіг.3а), крім моди відстані 6m. Отриманий відбитий від транспортного засобу сигнал першого променя запізнюється (Фіг.3б, з, і) на час розповсюдження t3=2R/c, де R, c - відповідно відстань та швидкість розповсюдження світла. Виявлення сигналу відбувається у пороговому пристрої 10-1 або 10-2, з виходів яких через елемент АБО 20 на вхід «а» селектора 2 подовжніх мод поступає сигнал (Фіг.3в) для підключення випромінювання моди відстані 6m, формування імпульсів цієї ж частоти у блоці 14 формування імпульсів для рахунку імпульсів (Фіг.3д) лічильником 15 імпульсів відстані. Затримка моди відстані завжди менше ніж тривалість відбиття променя від транспортного засобу. Тому мода відстані раніше приймається приймальною оптикою 5 і фотодетектором 6, підсилюється широкосмуговим підсилювачем 7, підсилюється своїм резонансним підсилювачем 8-3, далі формувач імпульсів 9-3 виробляє імпульс закриття (Фіг.3г) лічильника відстані 15 і видає у цифровому вигляді відстань у ЕЦОМ 12 та на блок 19 керування дефлекторами регулювання діапазону (кута) розкриття у повторному циклі дефлекторів блока 3. Перший промінь згідно з Фіг.2 рухається назустріч транспортному засобу, тому час відбиття променя менше (Фіг.3ж), ніж у другого променя (Фіг. 3є). Час відбиття променів t1, t2 (Фіг.3е, ж) дозволяє знайти тангенціальну швидкість транспортному засобу з рівнянь: t1 I /( пр ), t 2 I /(пр ), (1) де пр , - відповідно лінійна тангенціальна швидкість променя (світлової плями відбиття променя) і тангенціальна швидкість транспортного засобу, I - тангенціальний шлях (плями) променя впродовж міделєвого перетину транспортного засобу. Систему рівнянь можна перетворити у наступну систему (2): T пр (1 ТЗ ) t1 , (2) T пр ( ТЗ 1) t2 причому пр I I R , (3) TТЗ T T де I, Т - відповідно довжина загального шляху плями на цій відстані і час циклу руху променів; Ттз - час проходження плями по ТЗ; R, - відповідно відстань і допустимий кут руху променів. 62015 6 З рівнянь (2) отримують значення Ттз 2t1t 2 TТЗ . (4) t1 t 2 Оскільки тангенціальна лінійна швидкість (плями) променів повинна бути заданою і постійною у цикліїх руху, то згідно з співвідношенням (3) треба вимірювати відстань R і розрахувати потрібну кутову швидкість /Т. Тобто, у скільки разів збільшилася відстань R, у стільки разів треба зменшити кутову швидкість /Т, або збільшити час сканування. Або при заданому часі сканування зменшити кут розкриття променів. Практичніше за результатом виміру відстані визначати розмах пилоподібної напруги у блоці 3 дефлекторів блоком 19 керування дефлекторами (вхід «в» Фіг.1). Значення np краще вибирати на 30% більшим максимальної швидкості транспортного засобу. Коли вимірювана радіальна швидкість, повна швидкість визначається за теоремою Піфагора. Тангенціальний (видимий) розмір транспортного засобу, або міделєвого перетину, можна визначити за допомогою формули (4): I пр TТЗ . Кут падіння лінії прицілювання (середини між променями) визначається за допомогою значень радіальної і тангенціальної швидкостей. Повний розмір транспортного засобу знаходиться за звісними значеннями тангенціального розміру та кута падіння лінії прицілювання (Фіг.2). Технічний результат при використанні корисної моделі, пристрою для вимірювання параметрів транспортних потоків, полягає у тому, що він дозволяє точно вимірювати у цифровому вигляді майже усі головні технічні параметри руху транспортних засобів, навіть тангенціальну швидкість, в складних дорожніх умовах: при будь-якій конфігурації дороги, у широкому діапазоні відстаней і кутів обзору. Джерела інформації: 1. Рондин Ю.П., Коломийцев А.В. Система автоматического сопровождения объекта по направлению на многомодовых лазерах // Информационные системы. Вып. - 1(5), - Харьков. - НАНУ ПАНИ, ХВУ, 1997. - С. 35-39. 2. Алешин Г.В., Коломийцев А.В., Боровик А.В. Проблемы создания высокоточной лазерной шестипараметрической системы нового поколения на основе модернизированного частотно-временного метода измерений. / Системи обробки інформації. Вип. - 4(20), - Харків. - НАНУ ПАНИ, ХВУ, 2002, - С. 145-149. 3. Альошин Г.В., Коломійцев Ю.В., Пашков Д.П. Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу. Деклар. патент на винахід 63285 А, G01S 11/04, G01S 17/42, 15.01.2004. Бюл. №1. 7 Комп’ютерна верстка А. Рябко 62015 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for vehicle parameter measurement
Автори англійськоюAlioshyn Hennadii Vasyliovych, Kolomiitsev Oleksii Volodymyrovych, Levterov Andrii Ivanovych, Yaruta Anton Mykolaiovych
Назва патенту російськоюУстройство для измерения параметров транспортных средств
Автори російськоюАлешин Геннадий Васильевич, Коломийцев Алексей Владимирович, Левтеров Андрей Иванович, Ярута Антон Николаевич
МПК / Мітки
МПК: G01S 11/00, G01S 17/42, G08G 1/052
Мітки: засобів, вимірювання, транспортних, параметрів, пристрій
Код посилання
<a href="https://ua.patents.su/4-62015-pristrijj-dlya-vimiryuvannya-parametriv-transportnikh-zasobiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання параметрів транспортних засобів</a>
Пристрій для вимірювання параметрів транспортних потоків
Номер патенту: 60154
Опубліковано: 10.06.2011
Автори: Ярута Антон Миколайович, Денисенко Олег Васильович, Левтеров Андрій Іванович
МПК: G08G 1/09
Мітки: транспортних, потоків, пристрій, параметрів, вимірювання
Формула / Реферат:
Пристрій для вимірювання параметрів транспортних потоків, що складається з датчика лазерного випромінювання інфрачервоного діапазону, оптичного модулятора, генератора розгортки, лічильника-дешифратора, підсилювачів, дискретного сканера, задавального генератора, елемента визначення частоти доплерівського зсуву сигналу, перетворювача частоти зсуву сигналу і фотоприймача, причому генератор розгортки через лічильник-дешифратор, що послідовно...
Пристрій кондиціонування повітря для транспортних засобів
Номер патенту: 44514
Опубліковано: 15.02.2002
Автори: Драпак Георгій Мефодіович, Козак Олег Володимирович, Бачок Олег Сергійович
МПК: B60H 3/00
Мітки: засобів, кондиціонування, транспортних, пристрій, повітря
Формула / Реферат:
Пристрій кондиціонування повітря для транспортних засобів оснащений повітропроводом для подачі повітря до салону транспортних засобів, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру, відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру розташовано у повітропроводі, який керує продуктивністю роботи вентилятора.
Пристрій переднього огляду для транспортних засобів
Номер патенту: 37833
Опубліковано: 10.12.2008
Автор: Мартиненко Олександр Васильович
МПК: B60R 1/00
Мітки: переднього, огляду, транспортних, пристрій, засобів
Формула / Реферат:
Пристрій переднього огляду для транспортних засобів, що містить два дзеркала, який відрізняється тим, що дзеркала розташовані з зовнішнього боку транспортного засобу з можливістю зміни кута огляду і встановлені таким чином, що віддзеркалювані поверхні розташовані вздовж бокових поверхонь транспортного засобу.
Пристрій для вимірювання струму витікання високовольтного обладнання транспортних засобів
Номер патенту: 24679
Опубліковано: 04.08.1998
Автори: Далека Василь Хомич, Міренський Ігор Григорович, Коваленко Віталій Іванович, Лозовий Сергій Борисович, Крутій Леонард Михайлович
МПК: G01R 19/00, G01R 19/145
Мітки: обладнання, транспортних, пристрій, засобів, витікання, вимірювання, струму, високовольтного
Формула / Реферат:
Пристрій для вимірювання струму витікання високовольтного обладнання транспортних засобів, що містить послідовно з'єднані контактний щуп, міліамперметр і заземлювач, який відрізняється тим, що забезпечений комутатором, який самоперемикається, двома осередками пам'яті, резисторним розподілом напруги, двома множними елементами й двома диференціальними підсилювачами, причому до виходу щупа підключено вхід комутатора, що самоперемикається, виходи...
Пристрій для кондиціонування повітря в салонах транспортних засобів
Номер патенту: 44515
Опубліковано: 15.02.2002
Автори: Бачок Олег Сергійович, Драпак Георгій Мефодіович, Козак Олег Володимирович
МПК: B60H 3/00
Мітки: транспортних, засобів, повітря, пристрій, кондиціонування, салонах
Формула / Реферат:
Пристрій для кондиціонування повітря в салонах транспортних засобів, що оснащений повітропроводом, фільтром, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру з привідною заслінкою, який відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру встановлено у повітропроводі після фільтру, а між вхідним та рециркуляційним каналами встановлено перегородку для заслінки, при цьому заслінку...
Попередній патент: Прилад для випробування матеріалу виробу на твердість дряпанням
Наступний патент: Спосіб лікування коней з асептичними та септичними ранами
Випадковий патент: Керування перешкодами з застосуванням часткового повторного використання частот