Зубчасте зачеплення
Номер патенту: 62400
Опубліковано: 15.12.2003
Автори: Лученков Єгор Євгенович, Попов Олексій Павлович, Романовський Георгій Федорович, Попова Лариса Олексієвна, Форносов Єгор Юрійович
Формула / Реферат
Зубчасте зачеплення, яке складається з ведучого та веденого зубчастих коліс з розташованими на них евольвентними зубами, які знаходяться в зачепленні між собою, яке відрізняється тим, що бічні профілі головок зубів на відстані ![]() = 0,25m від полюса зачеплення виконані у вигляді кривих, що характеризуються у довільно взятих точках постійними радіусами кривизни
= 0,25m від полюса зачеплення виконані у вигляді кривих, що характеризуються у довільно взятих точках постійними радіусами кривизни ![]() та
та ![]() з центрами кривизни, які розташовані поза лінією зачеплення, за виключенням полюса зачеплення, до того ж ці криві визначаються за знайденими рівняннями, а радіуси кривизни
з центрами кривизни, які розташовані поза лінією зачеплення, за виключенням полюса зачеплення, до того ж ці криві визначаються за знайденими рівняннями, а радіуси кривизни ![]() та
та ![]() - із співвідношень:
- із співвідношень:
![]()
![]() - радіуси кривизни евольвентних профілів ніжок зубів в полюсі зачеплення;
- радіуси кривизни евольвентних профілів ніжок зубів в полюсі зачеплення;
m - модуль зачеплення;
z1, z2 - кількість зубів відповідно ведучого та веденого зубчастих коліс;
![]() - кут зачеплення.
- кут зачеплення.
Текст
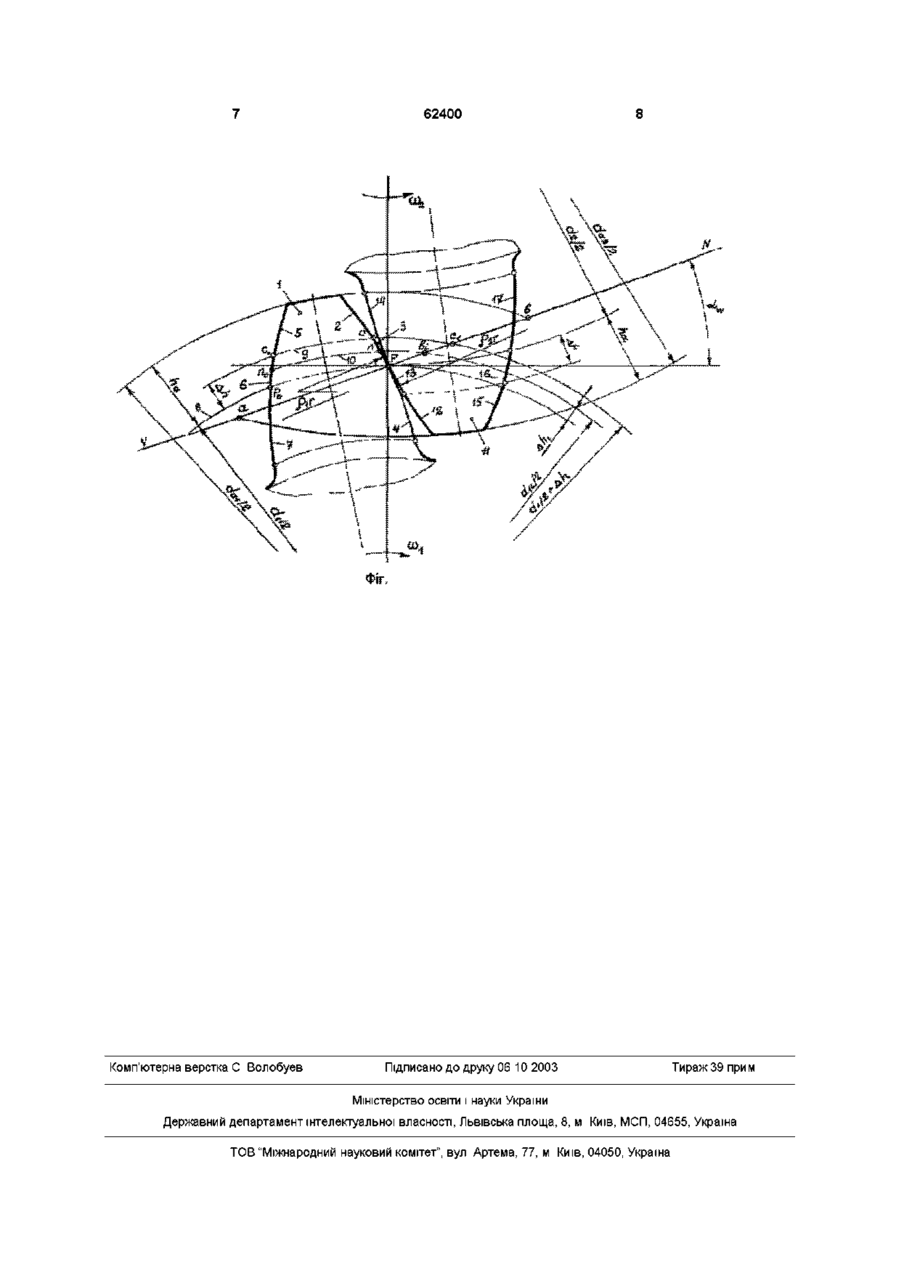
Зубчасте зачеплення, яке складається з ведучого та веденого зубчастих коліс з розташованими на них евольвентними зубами, які знаходяться в зачепленні між собою, яке відрізняється тим, що бічні профілі голівок зубів на відстані Ah = 0,25m від полюса зачеплення виконані у вигляді кривих, що характеризуються у довільно взятих точках Винахід відноситься до області машинобудування Відомо зубчасте зачеплення, що складається з ведучого та веденого зубчастих коліс з розташованими на них евольвентними зубами, які шляхом взаємодії один з одним здійснюють передачу обертання та навантаження від одних валів іншим валам машин та механізмів [1] Кудрявцев В Н , Державец Ю А, Глухарев Е Г Конструкция и расчет зубчастих передач редукторов - Л Машиностроение, 1971 - 328 с , [2] Осецкий Н С , Моисеенко Е И , Мясников Г В И др Прикладная механика -М Машиностроение, 1977 -488 с Недоліком евольвентного зачеплення є невисока навантажувальна здатність зубів по контактним напруженням, яка визначається в полюсі зачеплення, підвищення якої можливе за рахунок збільшення габаритів зубчастих передач [1] Кудрявцев В Н , Державец Ю А , Глухарев Е Г Конструкция и расчет зубчастих передач редукторов Л Машиностроение, 1971 -328 с Найбільш близьким за технічною сутністю до рішення, що пропонується є прийняте за прототип зубчасте зачеплення, у якого внаслідок зміщення ріжучого інструменту від осі або до осі зубчастих постійними радіусами кривизни р-ц- та Р2г з центрами кривизни, які розташовані поза ЛІНІЄЮ зачеплення, за виключенням полюса зачеплення, до того ж ці криві визначаються за знайденими рівняннями, а радіуси кривизни р-ц- та Р2г - із співвідношень р ІГ (2,5 Sjpi/smayv, Р2Г = (2,5 3 ) p 2 / s i n a w , де pi = mz-i sinayy /2, р 2 = mz2 sinayy /2 радіуси кривизни евольвентних профілів ніжок зубів в полюсі зачеплення, m - модуль зачеплення, z-i, Z2 - КІЛЬКІСТЬ зубів ВІДПОВІДНО ведучого та веденого зубчастих коліс, ayv - кут зачеплення коліс, що нарізаються, збільшуються радіуси кривизни евольвентних кривих у різних точках, у тому числі і в полюсі зачеплення, що призводить до зниження величин контактних напружень та, як наслідок, до підвищення навантажувальної здатності зачеплення [2] Осецкий Н С , Моисеенко Е И , Мясников Г В И др Прикладная механика М Машиностроение, 1977 -488 с Недоліком вказаного евольвентного зачеплення є невелике підвищення контактної МІЦНОСТІ зубів, яке не відповідає вимогам, що висуваються до евольвентного зачеплення Задача винаходу - зниження контактних напружень в полюсі зачеплення, підвищення навантажувальної здатності та ефективності роботи зубчастого зачеплення Для вирішення задачі бічні профілі головок зубів на відстані Ah = 0,25m від полюсу зачеплення виконані у вигляді кривих, що характеризуються у довільно взятих точках сталими радіусами кривизни ріг та Р2г з центрами кривизни, які розташовані поза ЛІНІЄЮ зачеплення, за виключенням полюсу зачеплення, до того ж ці криві визначаються по знайденим рівнянням, а радіуси кривизни р-ц О о (О 62400 та Р2г р 1 Г =(2,5 З ^ / э т а ^ із та по дузі рро ділильного кола 8, визначає товщи співвідношень ну р 2 г =(2,5 3 ) p 2 / s m a w зуба sw=7im/2 Дуга 10, що проведена -радіу радіусом di,/2, до того ж d-i/ 2 < d-|, / 2 < d-| / 2 + A h , си кривизни евольвентних профілів ніжок зубів в що дорівнює дузі п п о , характеризує довільну то полюсі зачеплення, m - модуль зачеплення z-i, Z2 вщину S,, бічного профілю зуба 1, розташованого КІЛЬКІСТЬ зубів ВІДПОВІДНО ведучого та веденого між кривими 3 та 6 Відстань Ah , в межах якої ос зубчастих коліс, a нови головок зубів окреслені, починаючи з точки р, де р і = mz-i s m a w /2, Р2 = mz2 s m a w / 2 , w - кут зачеплення кривими 3 та 6, дорівнює 0 , 2 5 т Порівняльний аналіз з прототипом показує, що зубчасте зачеплення, яке заявляється, відрізняється тим, що бічні профілі головок зубів на відстані Ah =0,25m від полюсу зачеплення виконані у вигляді кривих, що характеризуються у довільно взятих точках сталими радіусами кривизни р-ц- та Р2г Зуб 11 веденого зубчастого колеса, по аналогії з зубом 1, має лівий бічний профіль, що складається з евольвенти 12, кривої 13 та евольвенти 14 Правий бічний профіль зуба 11 також складається з евольвенти 15, кривої 16 та евольвенти 17 Криві 13 та 16, як і криві 3 та 6, характеризуються в кожній довільно взятій точці сталим радіусом кривизни Р2г, центри кривизни якого, за виключенням полюсу зачеплення, знаходяться поза ЛІНІЄЮ зачеплення NN Відстань Ah , у межах якої основи головок зубів веденого зубчастого колеса окреслені кривими 13 та 16, також рівна 0 , 2 5 т Для побудови ділянок бічних профілів зуба 1 у вигляді кривих 3 та 6 необхідно знати розміри дуг кіл 8 та 9, замкнених між дугами рро = s w = s m a x з центрами кривизни, які розташовані поза ЛІНІЄЮ зачеплення, за виключенням полюсу зачеплення, до того ж ці криві визначаються по знайденим рівнянням, а радіуси кривизни р-ц- та Р2г - із отриманих співвідношень На фіг зображене зачеплення зубів ведучого та веденого зубчастих коліс в полюсі зачеплення Зубчасте зачеплення складається з зуба 1 ведучого зубчастого колеса, правий бічний профіль якого містить евольвенту 2, криву 3 та евольвенту 4 Аналогічно лівий бічний профіль зуба 1 характеризується евольвентою 5, кривою 6 та евольвентою 7 Ідентичні криві 3 та 6 обмежені дугами 8 та 9, до того ж дуга 8 є частиною дуги ділильного кола зуба 1, що проведене радіусом d-i/2 т а C C Q = s m , n В результаті виконаних теоретичних ДОСЛІДІВ знайдений вираз для довільної дуги ппо = s, кола 10, який має вигляд Криві 3 та 6 в довільно взятій точці мають сталий радіус кривизни р-ц-, центри кривизни якого знаходяться поза ЛІНІЄЮ зачеплення NN , за виключенням полюсу зачеплення Відстань, що взяf s, = 2m ц 1 > \ r a i=d a i/2 - радіус кола вершин довжина робочої лінії зачеплення головки зуба 1 з ніжкою зуба 1 1 , яка визначається положенням точки п, що належить кривій З 2г-] cos a,, Xh. зубів ведучого зубчастого колеса, pb, - поточна pb, 2tga, Фі = 1,0 Якщо в рівнянні (1) прийняти Х = 0, то отри Тії маємо S|=Smax=Sw= рро sin2 a, При X =1/4 3 ріВНЯННЯ (1) визначається величина дуги smm = CCQ , яка в свою 9, = a r c c o s r a1i = h h m a = a > чергу, може бути знайдена, виходячи із загальновідомих виразів застосовано до евольвентного зачеплення Таким чином, визначив дугу s m m=cco pb, = по рів нянням евольвенти та підставивши и значення в рівняння (1) замість дуги s,, визначимо коефіцієнт X 0
ДивитисяДодаткова інформація
Назва патенту англійськоюToothed gear
Автори англійськоюRomanovskyi Heorhii Fedorovych, Popov Oleksii Pavlovych, Popova Larysa Oleksievna, Luchenkov Yehor Yevhenovych
Назва патенту російськоюЗубчатое зацепление
Автори російськоюРомановский Георгий Федорович, Попов Алексей Павлович, Попова Лариса Алексеевна, Лученков Егор Евгеньевич
МПК / Мітки
МПК: F16H 1/00
Мітки: зачеплення, зубчасте
Код посилання
<a href="https://ua.patents.su/4-62400-zubchaste-zacheplennya.html" target="_blank" rel="follow" title="База патентів України">Зубчасте зачеплення</a>
Зубчасте зачеплення попова о.п.
Номер патенту: 55868
Опубліковано: 15.04.2003
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: зубчасте, зачеплення, попова, о.п
Формула / Реферат:
Зубчасте зачеплення, що містить ведуче та ведене зубчасті колеса з розташованими на них зубами, що знаходяться в зачепленні між собою, яке відрізняється тим, що зуби виготовлені з евольвентних ніжок та неевольвентних головок, причому бокові профілі головок зубів отримані шляхом зменшення товщини початкових головок зубів по всій висоті з боковими профілями, які окреслені радіусами кривизни ρ11 і ρ22, розташованими на лінії...
Зубчаста передача попова о.п.
Номер патенту: 59839
Опубліковано: 15.09.2003
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: передача, попова, зубчаста, о.п
Формула / Реферат:
Зубчаста передача, що містить ведуче та ведене зубчасті колеса з розташованими на них зубами, які знаходяться між собою в зачепленні, яка відрізняється тим, що будь-які точки бокових профілів зубів характеризуються сталими і рівними радіусами кривизни, що перевищують за значенням змінні радіуси кривизни бокових профілів евольвентних зубів, до того ж центри кривизни радіусів не збігаються один з одним і розташовані поза лінією зачеплення, за...
Зубчасте зачеплення черв’ячної передачі
Номер патенту: 14766
Опубліковано: 18.02.1997
Автор: Настасенко Валентин Олексійович
МПК: F16H 55/02
Мітки: зачеплення, зубчасте, черв'ячної, передачі
Формула / Реферат:
1. Зубчатое зацепление червячной передачи на базе реечного исходного контура с углом профиля на делительной прямой, отделяющей головку и ножку профиля рейки, отличающееся тем, что боковая сторона профиля червяка выполнена вогнутой, а зуба колеса - адекватно выпуклой от головки и ножки к середине профиля на величину модификации контактирующих поверхностей, форма которых перераспределяет тепловые и силовые нагрузки от вершины к ножке витка...
Зубчасте колесо
Номер патенту: 35365
Опубліковано: 15.03.2001
Автор: Селівановський Володимир Юрійович
МПК: F16H 57/04
Формула / Реферат:
1. Зубчасте колесо, у тілі якого виконані радіальні канали у вигляді наскрізних отворів, яке відрізняється тим, що ці отвори виконані у зуб'ях, причому осі отворів лежать у серединній площині зуба.2. Зубчасте колесо за п. 1, яке відрізняється тим, що до внутрішньої порожнини колеса прилаштований мастилопідвідний пристрій, що підводить мастило тільки до каналів зубів, що знаходяться у зоні зачеплення. 3. Зубчасте колесо за п. 2,...
Планетарна передача
Номер патенту: 30682
Опубліковано: 15.12.2000
Автор: Бичук Анатолій Володимирович
МПК: F16H 1/36
Мітки: передача, планетарна
Формула / Реферат:
Планетарна передача, що складається з корпуса, ведучого і веденого валів, двох зубчастих сонячних коліс, перше з яких закріплене на ведучому валі, а друге нерухомо з'єднане з корпусом, закріпленого на веденому валі водила з установленою на ньому віссю, на якій закріплено два зубчасті сателіти, яка відрізняється тим, що зубчасті сонячні колеса виготовлені гнучкими у формі тонкостінних пружних стаканів, а на веденому валі закріплені генератори...
Попередній патент: Ультразвукова імпульсна доплерівська система для дослідження кровообігу
Наступний патент: Зубчасте зачеплення з поздовжньо модифікованими зубами
Випадковий патент: Пристрій для управління кришкою люка літального апарату