Спосіб зважування вантажів
Номер патенту: 62555
Опубліковано: 15.12.2003
Автори: Лісовий Віталій Васильович, Чаков Олександр Миколайович, Раздобаров Віктор Георгійович, Ситий Володимир Іванович, Сацюк Валерій Іванович
Формула / Реферат
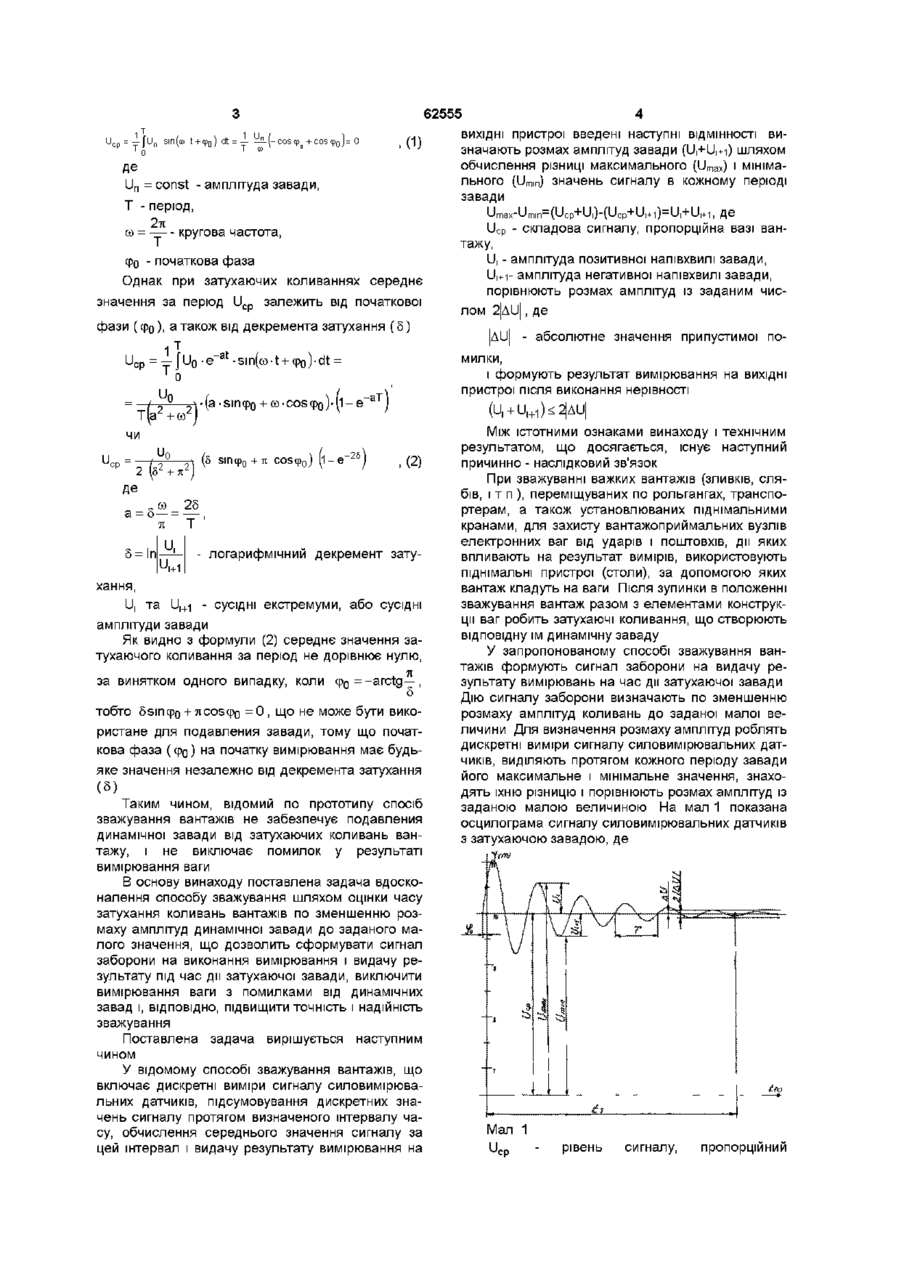
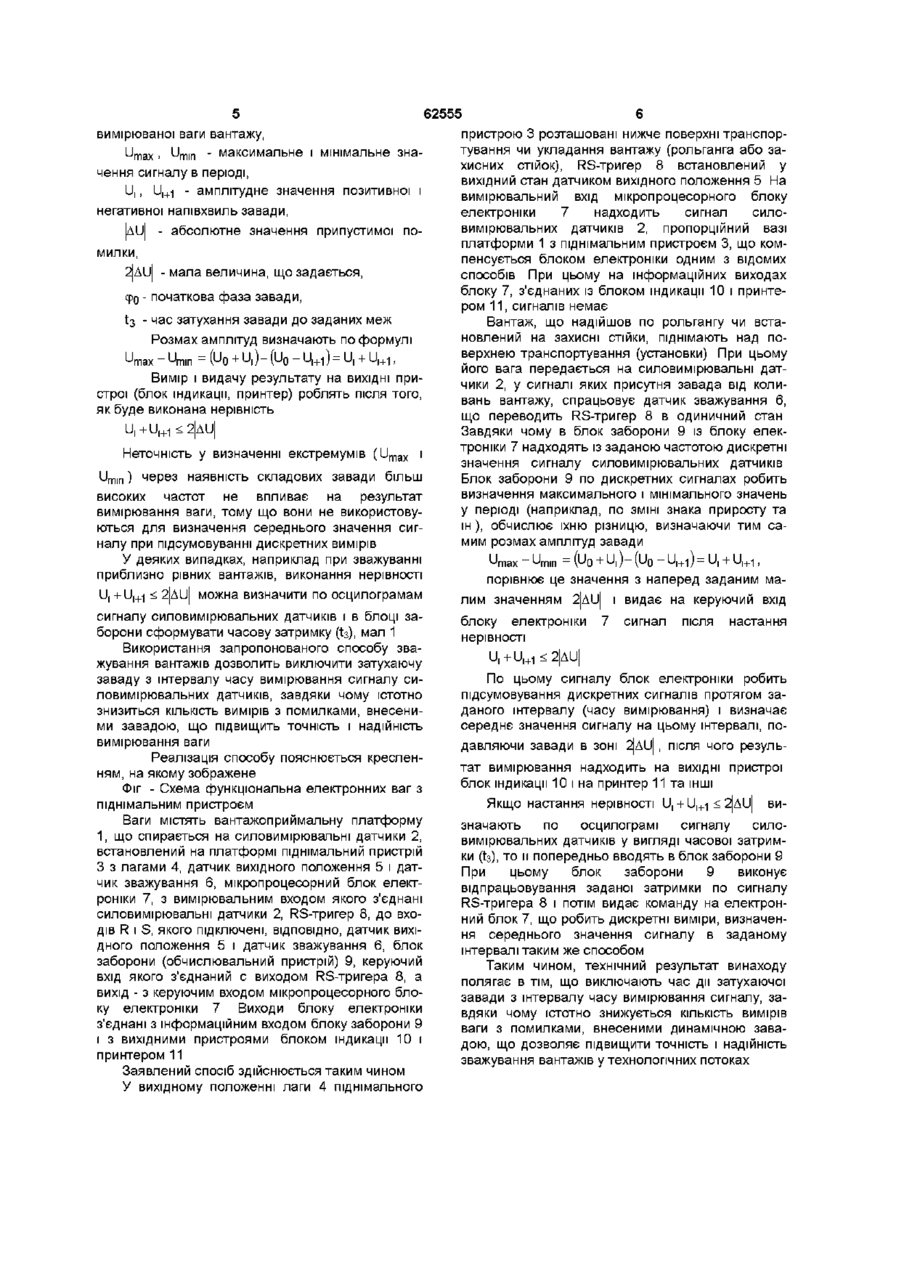
Спосіб зважування вантажів, що включає дискретні виміри сигналу силовимірювальних датчиків, підсумовування дискретних значень сигналу протягом визначеного інтервалу часу, обчислення середнього значення сигналу за інтервал часу і видачу результату на вихідні пристрої, який відрізняється тим, що визначають розмах амплітуд завади (Uі + Uі+1) шляхом обчислення різниці максимального (Umax) і мінімального (Umin) значень сигналу в кожнім періоді завади:
Umax - Umin = (Uсp + Ui) - (Ucp - Uі+1) == Uі + Uі+1, де
Ucp - складова сигналу, пропорційна ваги вантажу,
Ui - амплітуда позитивної напівхвилі завади,
Uі+1 - амплітуда негативної напівхвилі завади, порівнюють розмах амплітуд із заданим числом 2|![]() U|, де
U|, де
|![]() U| - абсолютне значення припустимої помилки, і формують результат вимірювання на вихідні пристрої після виконання нерівності:
U| - абсолютне значення припустимої помилки, і формують результат вимірювання на вихідні пристрої після виконання нерівності:
(Uі + Uі+1) ![]() 2|
2|![]() U|.
U|.
Текст
Спосіб зважування вантажів, що включає дискретні виміри сигналу силовимірювальних датчиків, підсумовування дискретних значень сигналу протягом визначеного інтервалу часу, обчислення середнього значення сигналу за інтервал часу і Винахід відноситься до ваговимірювальної техніки і може бути використаний для зважування зливків, слябів, пакетів листового металу і інших вантажів у технологічних потоках на рольгангах, транспортерах і т п , з підйомом (опусканням) вантажів на вантажоприймальні пристрої ваг Відомий спосіб зважування вантажів по книзі "Ваги, вагові дозатори, системи зважування і дозування", довідник, книга перша, стор 96 97, м Одеса, Астропринт, 2001, у якому вантаж, що транспортується рольгангом, (сляб, зливок) після його зупинки піднімають піднімальним столом (пристроєм), передаючи його вагу на вантажоприймальний пристрій, що містить вагові модулі із силовимірювальними датчиками, вимірюють сигнали датчиків мікропроцесорним блоком електроніки і видають результат на ВИХІДНІ пристрої (блок індикації, принтер, ПЭВМ і т п ) Недолік відомого способу обумовлений тим, що при ПІДЙОМІ і зупинці вантажу в положенні зважування від коливань вантажу в сигналі силовимірювальних датчиків присутня затухаюча динамічна завада, у той час як початок і інтервал вимірювання сигналів датчиків мікропроцесорним блоком не регламентований, що може привести до помилкового результату через вплив динамічної видачу результату на ВИХІДНІ пристрої, який відрізняється тим, що визначають розмах амплітуд завади (І), + Ц+і) шляхом обчислення різниці максимального (Umax) І МІНІМаЛЬНОГО (Umm) ЗНЭЧеНЬ сигналу в кожнім періоді завади Umax - Um,n = (UCp + U,) - (U c p - U,+i) = U, + U,+ 1, ДЄ U cp - складова сигналу, пропорційна ваги вантажу, U, - амплітуда позитивної напівхвилі завади, и,+і - амплітуда негативної напівхвилі завади, порівнюють розмах амплітуд із заданим числом 2|AU|, де ІA U| - абсолютне значення припустимої помилки, і формують результат вимірювання на ВИХІДНІ пристрої після виконання нерівності (U, + Ul+1)
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring weight
Автори англійськоюSytyi Volodymyr Ivanovych, Lisovyi Vitalii Vasyliovych, Razdobarov Viktor Heorhiyovych, Satsiuk Valeriy Ivanovych, Chakov Oleksandr Mykolayovych
Назва патенту російськоюСпособ взвешивания груза
Автори російськоюСытый Владимир Иванович, Лисовый Виталий Васильевич, Раздобаров Виктор Георгиевич, Сацюк Валерий Иванович, Чаков Александр Николаевич
МПК / Мітки
МПК: G01G 23/18
Мітки: спосіб, зважування, вантажів
Код посилання
<a href="https://ua.patents.su/4-62555-sposib-zvazhuvannya-vantazhiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб зважування вантажів</a>
Пристрій для зважування транспортувальних вантажів
Номер патенту: 47967
Опубліковано: 15.07.2002
Автори: Архіпов Олександр Миколайович, Чаков Олександр Миколайович, Сацюк Валерій Іванович, Лісовий Віталій Васильович, Раздобаров Віктор Георгійович, Сімененко Олег Володимирович
МПК: G01G 19/04, G01G 11/00
Мітки: зважування, транспортувальних, вантажів, пристрій
Формула / Реферат:
Пристрій для зважування транспортувальних вантажів, що містить вантажоприймальну платформу, що опирається з допомогою силоввідних елементів на силовимірювальні датчики, встановлені на станині, систему стабілізації положення вантажоприймальної платформи, вторинну вимірювальну апаратуру, який відрізняється тим, що до складу системи стабілізації входять пластини, які з'єднують вантажоприймальну платформу та станину з допомогою притискних...
Спосіб центрування довгомірних вантажів і пристрій для його здійснення
Номер патенту: 17486
Опубліковано: 06.05.1997
Автори: Коровець Ігор Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/06
Мітки: здійснення, спосіб, довгомірних, центрування, пристрій, вантажів
Формула / Реферат:
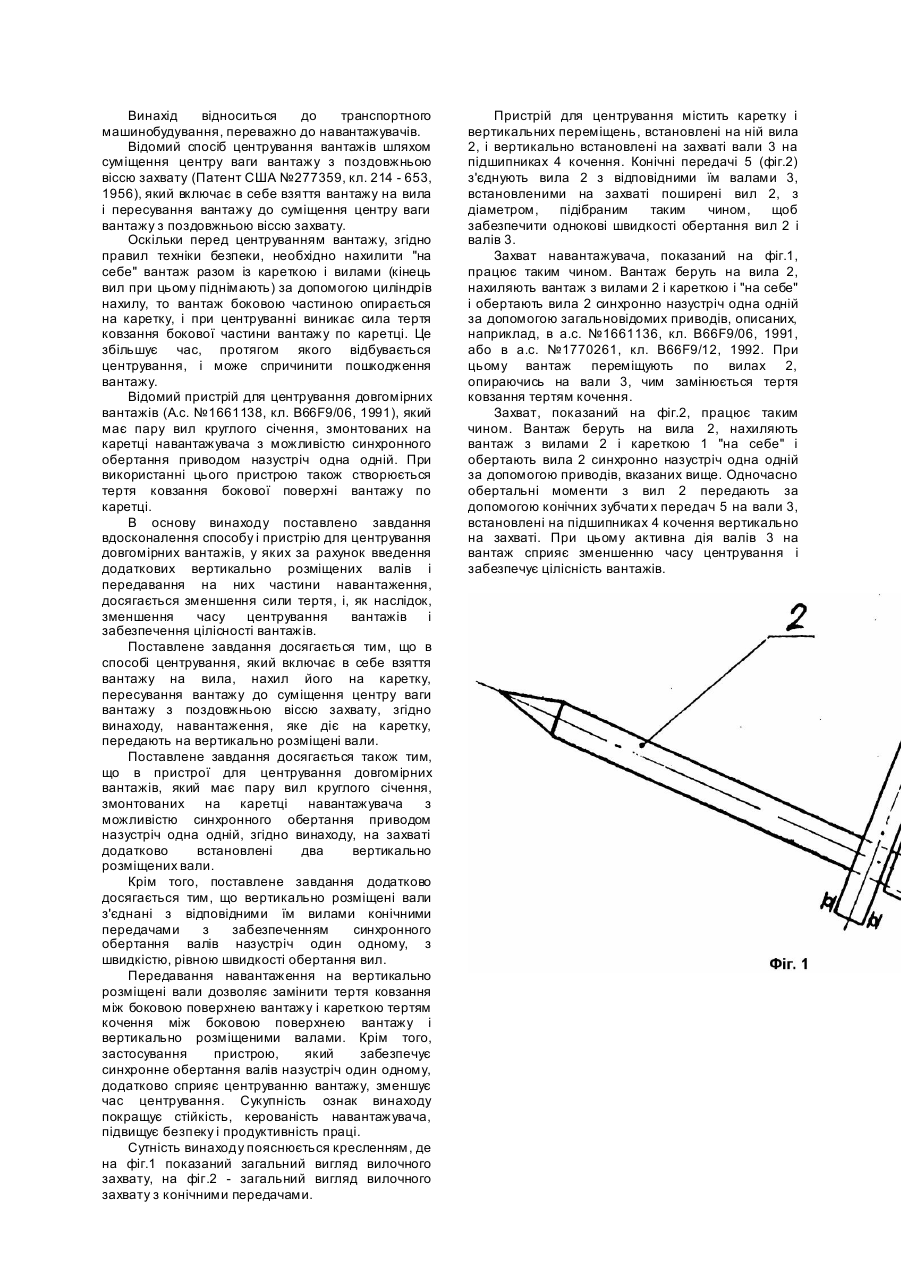
1. Спосіб центрування довгомірних вантажів, який включає в себе взяття вантажу на вила, нахил його на каретку, пересування вантажу до суміщення центру ваги вантажу з поздовжньою віссю захвату, який відрізняється тим, що навантаження, яке діє на каретку, передають на вертикально розміщені вали.2. Пристрій для центрування довгомірних вантажів, який має пару вил круглого січення, змонтованих на каретці навантажувача з можливістю...
Спосіб розвантаження сипучих вантажів із автомобілей важільно-балансирним механізмом
Номер патенту: 48388
Опубліковано: 15.08.2002
Автори: Хлинов Станіслав Олександрович, Мезенцев Микола Іванович, Шорохов Генадій Григорович
МПК: A01D 90/00
Мітки: спосіб, вантажів, важільно-балансирним, сипучих, розвантаження, механізмом, автомобілей
Формула / Реферат:
Спосіб розвантаження сипучих вантажів із автомобілів важільно-балансирним механізмом шляхом зміни кута нахилу платформи з автомобілем, який відрізняється тим, що зміну центра сил тяжіння платформи та нахилу автомобіля з вантажем до і після розвантаження здійснюють при взаємодії шарнірної опори та верхнього підпружиненого захоплювача платформи з крючком пандуса і взаємодії нижнього захоплювача з крючком платформи.
Спосіб укладання вантажів в пачках чи зв’язках на відкритому рухомому складі
Номер патенту: 35049
Опубліковано: 15.03.2001
Автори: Бабаєв Анатолій Максимович, Кушнір Валентина Олексіївна
Мітки: пачках, спосіб, рухомому, зв'язках, відкритому, укладання, вантажів, складі
Формула / Реферат:
Спосіб укладання вантажів в пачках чи зв'язках на відкритому рухомому складі, який передбачає розміщення пачок чи зв'язок по довжині кузова як горизонтально, так і з нахилом, відрізняється тим, що спочатку розміщують торцові групи вантажів з утворенням ними кососиметричних зазорів у середній частині кузова, після чого в ці зазори з нахилом верхніми частинами назустріч одна одній розміщують пачки чи зв'язки вантажу.
Система зважування залізничних вагонів і потягів у русі та спосіб ідентифікації вагонів і потягів у русі в процесі зважування
Номер патенту: 57536
Опубліковано: 16.06.2003
Автори: Паценкер Борис Львович, Григоров Євген Владиславович, Немчин Олександр Федорович, Яковлев Віталій Васильович
МПК: G01G 19/04
Мітки: русі, вагонів, ідентифікації, система, процесі, спосіб, залізничних, потягів, зважування
Формула / Реферат:
Спосіб виготовлення плівок халькогенідів металів, наприклад сульфіду цинку на підкладці полягає в тому, що всередині проточного реактора розміщують на вході кювету з хелатною металоорганічною сполукою, а на виході - підкладку. Пропускають через проточний реактор газ-носій. Нагрівають кювету до температури випаровування хелатної металоорганічної сполуки, а її пари за допомогою газу-носія транспортують до підкладки, яку перед цим додатково...
Попередній патент: Спосіб корекції порушень клітинної ланки неспецифічної реактивності бронхів у хворих на хронічний обструктивний бронхіт
Наступний патент: Магнітокомутуюча дискова машина з кігтеподібним індуктором
Випадковий патент: Мікроелектронний перетворювач тиску