Заспокоювач вантажозахватного органа
Номер патенту: 64638
Опубліковано: 10.11.2011
Автори: Рибалко Вячеслав Миколайович, Ловейкін Вячеслав Сергійович, Попський Богдан Михайлович, Мельниченко Вячеслав Вікторович
Формула / Реферат
Заспокоювач вантажозахватного органа який складається із відтяжних канатів, лебідки із гальмівним пристроєм, направляючих блоків, пересувного візка, який закріплено на гілці поліспаста, пристрою для регулювання натягу відтяжних канатів, який відрізняється тим, що відтяжні канати закріплені на рухомій гайці гвинтового механізму та огинають напрямні ролики механізму регулювання натягу відтяжних канатів, який закріплено на іншій рухомій гайці гвинтового механізму, що встановлений на пересувному візку; рухомі гайки гвинтового механізму мають протилежний напрямок руху вздовж осі гвинта, а пересувний візок додатково закріплений на канаті механізму зворотного ходу.
Текст
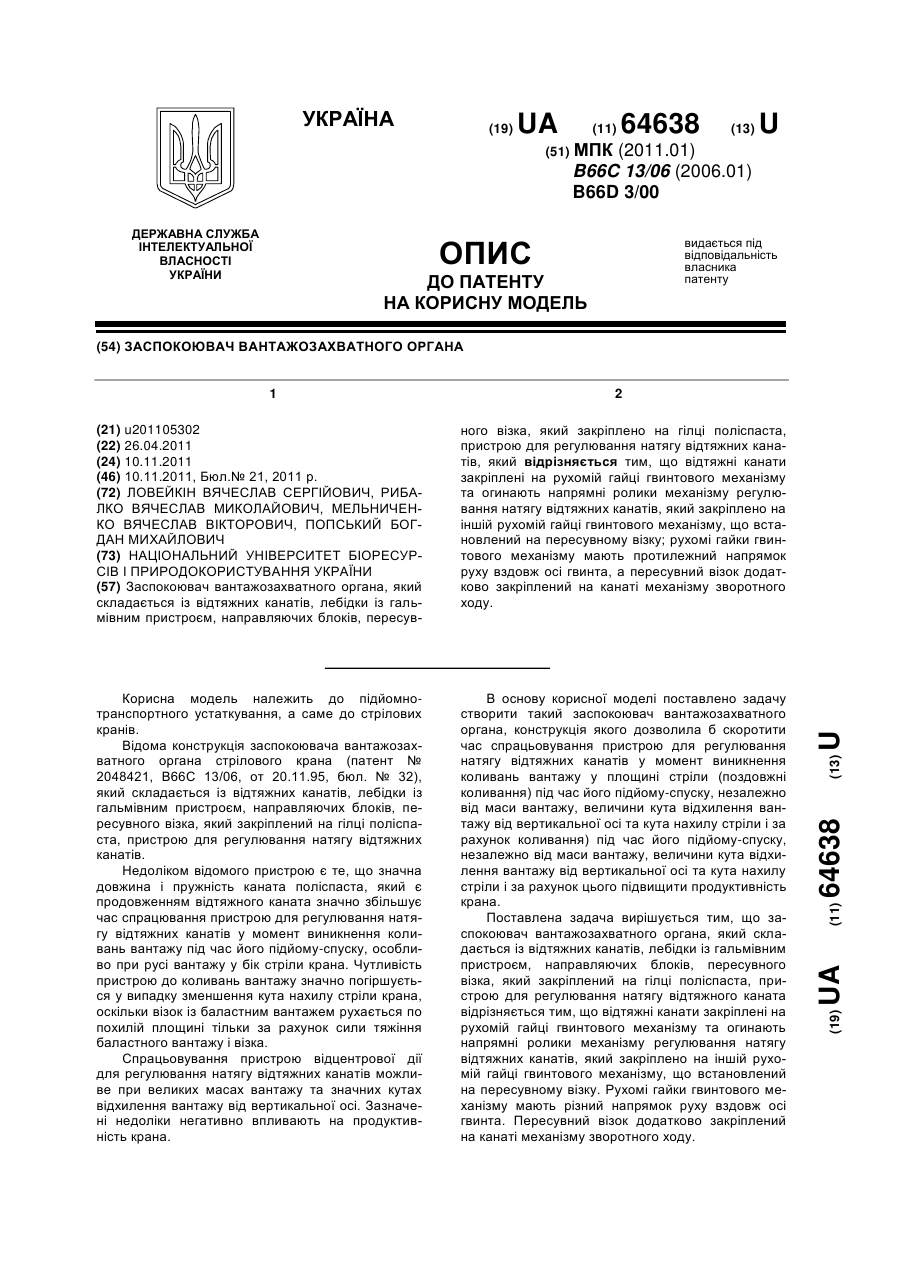
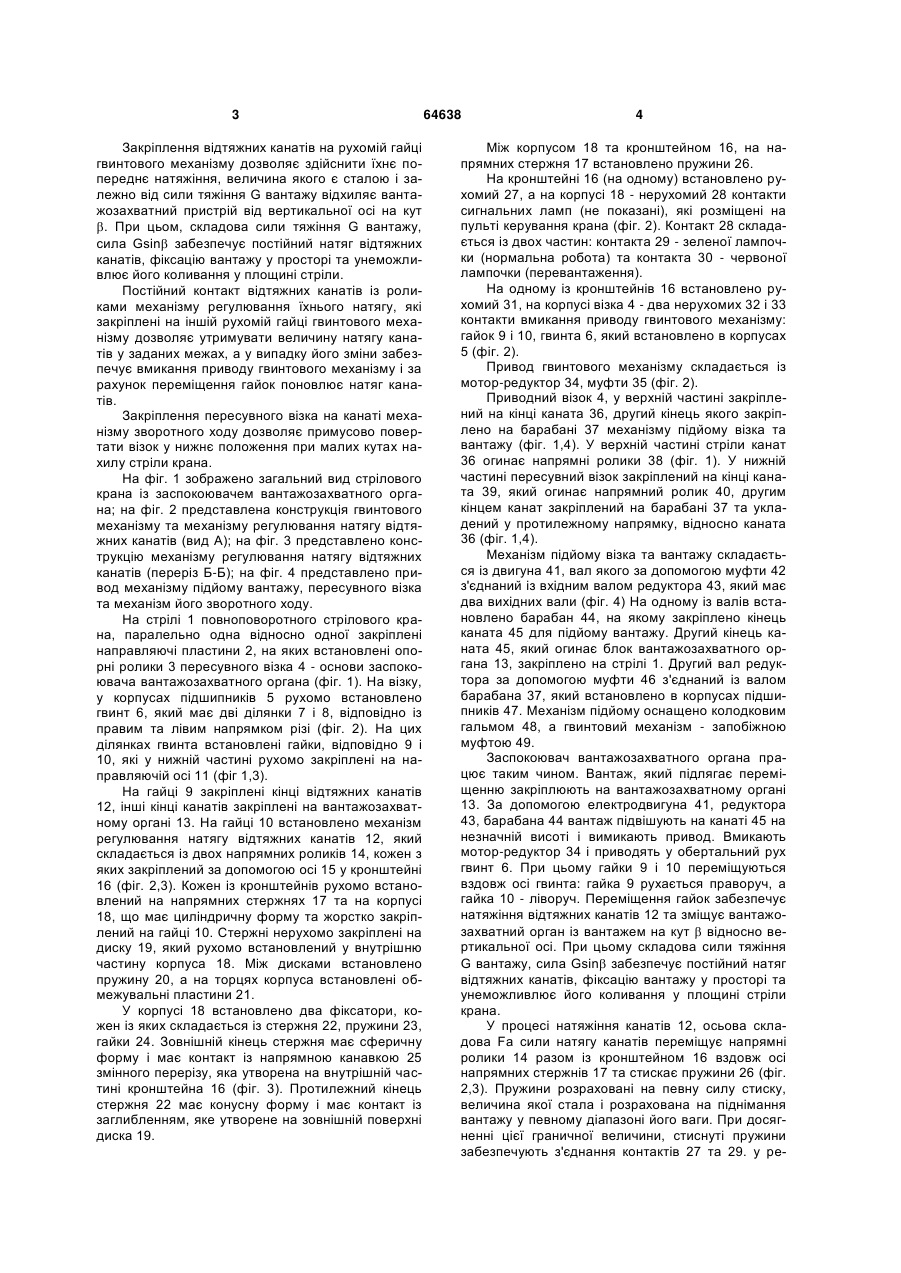
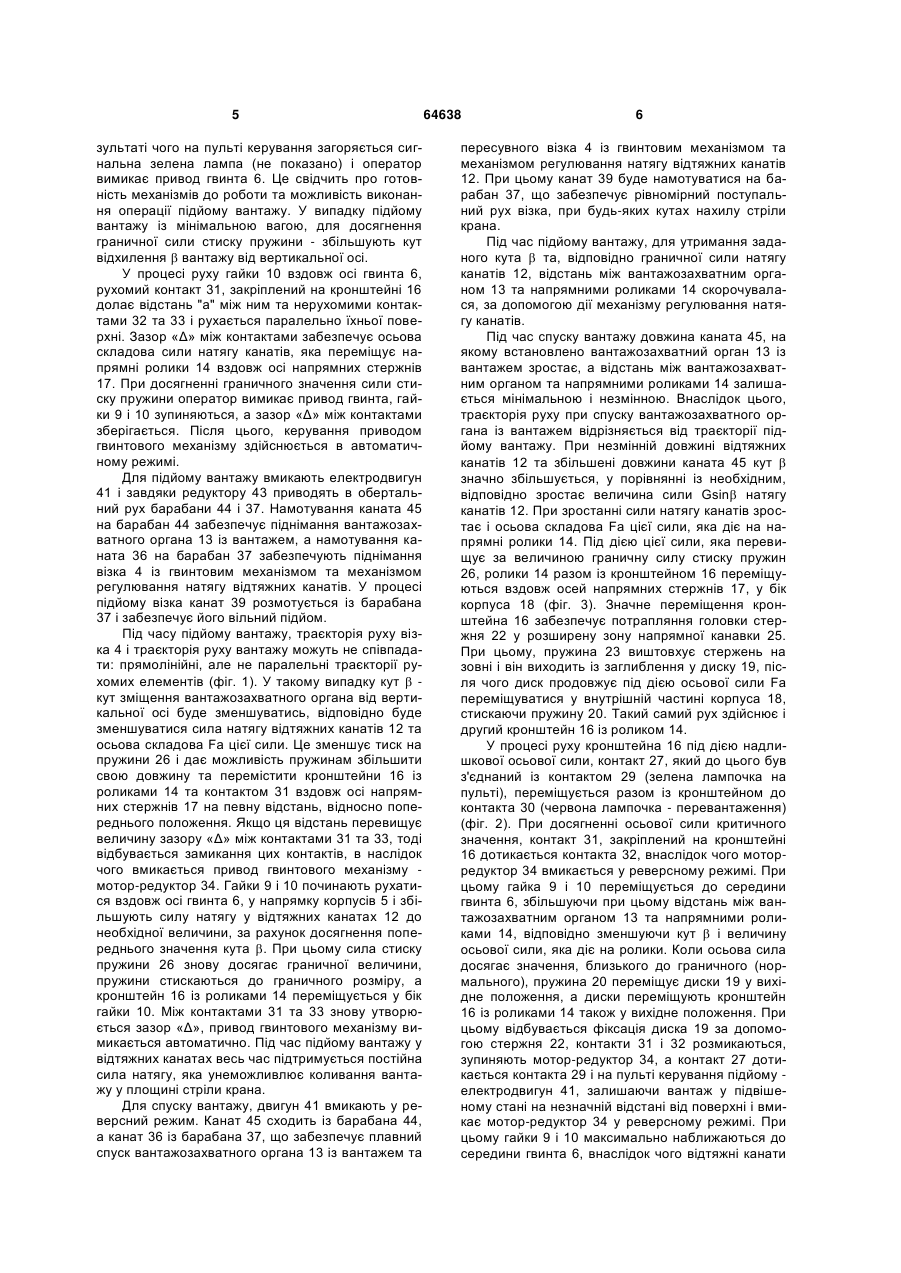
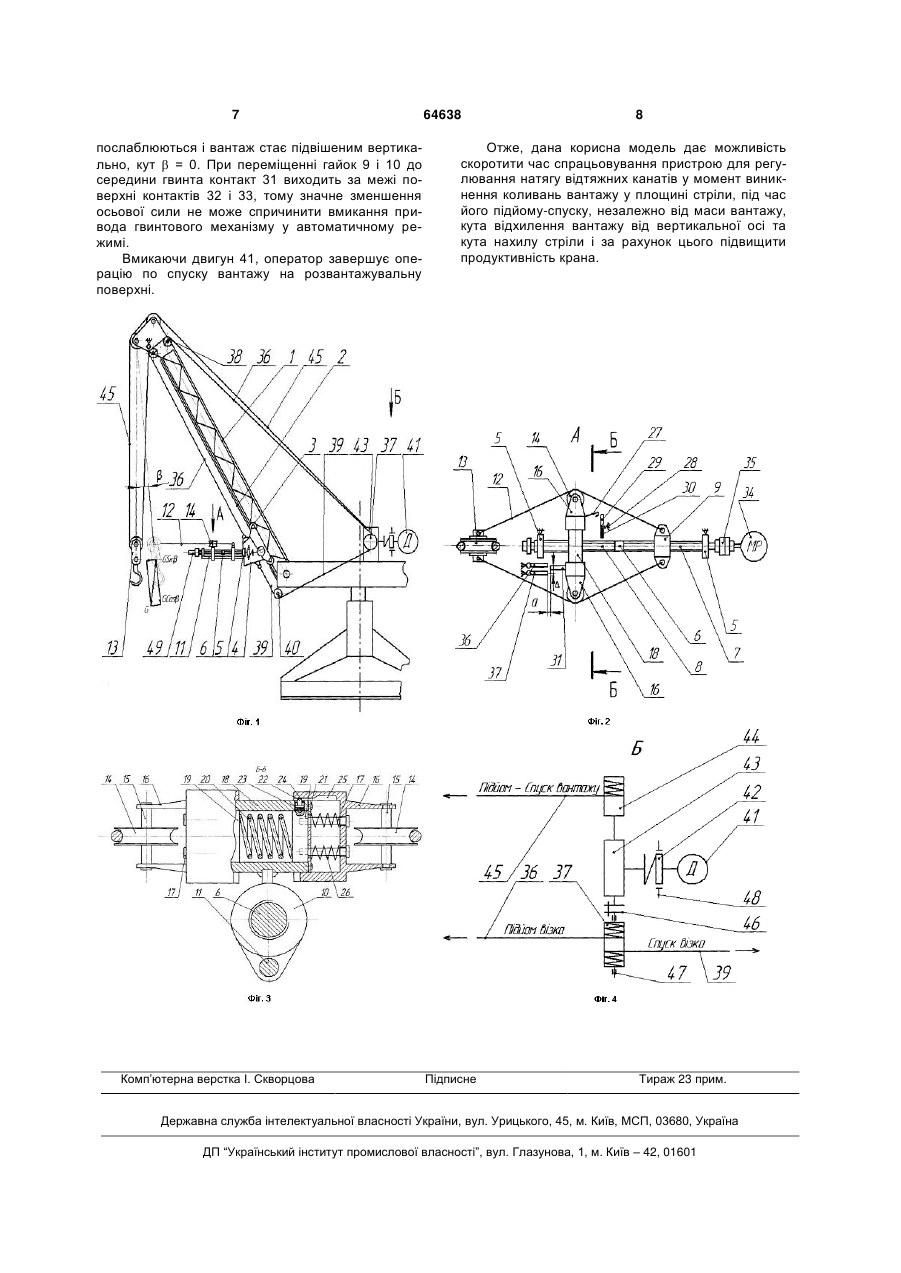
Заспокоювач вантажозахватного органа, який складається із відтяжних канатів, лебідки із гальмівним пристроєм, направляючих блоків, пересув 3 Закріплення відтяжних канатів на рухомій гайці гвинтового механізму дозволяє здійснити їхнє попереднє натяжіння, величина якого є сталою і залежно від сили тяжіння G вантажу відхиляє вантажозахватний пристрій від вертикальної осі на кут . При цьом, складова сили тяжіння G вантажу, сила Gsin забезпечує постійний натяг відтяжних канатів, фіксацію вантажу у просторі та унеможливлює його коливання у площині стріли. Постійний контакт відтяжних канатів із роликами механізму регулювання їхнього натягу, які закріплені на іншій рухомій гайці гвинтового механізму дозволяє утримувати величину натягу канатів у заданих межах, а у випадку його зміни забезпечує вмикання приводу гвинтового механізму і за рахунок переміщення гайок поновлює натяг канатів. Закріплення пересувного візка на канаті механізму зворотного ходу дозволяє примусово повертати візок у нижнє положення при малих кутах нахилу стріли крана. На фіг. 1 зображено загальний вид стрілового крана із заспокоювачем вантажозахватного органа; на фіг. 2 представлена конструкція гвинтового механізму та механізму регулювання натягу відтяжних канатів (вид А); на фіг. 3 представлено конструкцію механізму регулювання натягу відтяжних канатів (переріз Б-Б); на фіг. 4 представлено привод механізму підйому вантажу, пересувного візка та механізм його зворотного ходу. На стрілі 1 повноповоротного стрілового крана, паралельно одна відносно одної закріплені направляючі пластини 2, на яких встановлені опорні ролики 3 пересувного візка 4 - основи заспокоювача вантажозахватного органа (фіг. 1). На візку, у корпусах підшипників 5 рухомо встановлено гвинт 6, який має дві ділянки 7 і 8, відповідно із правим та лівим напрямком різі (фіг. 2). На цих ділянках гвинта встановлені гайки, відповідно 9 і 10, які у нижній частині рухомо закріплені на направляючій осі 11 (фіг 1,3). На гайці 9 закріплені кінці відтяжних канатів 12, інші кінці канатів закріплені на вантажозахватному органі 13. На гайці 10 встановлено механізм регулювання натягу відтяжних канатів 12, який складається із двох напрямних роликів 14, кожен з яких закріплений за допомогою осі 15 у кронштейні 16 (фіг. 2,3). Кожен із кронштейнів рухомо встановлений на напрямних стержнях 17 та на корпусі 18, що має циліндричну форму та жорстко закріплений на гайці 10. Стержні нерухомо закріплені на диску 19, який рухомо встановлений у внутрішню частину корпуса 18. Між дисками встановлено пружину 20, а на торцях корпуса встановлені обмежувальні пластини 21. У корпусі 18 встановлено два фіксатори, кожен із яких складається із стержня 22, пружини 23, гайки 24. Зовнішній кінець стержня має сферичну форму і має контакт із напрямною канавкою 25 змінного перерізу, яка утворена на внутрішній частині кронштейна 16 (фіг. 3). Протилежний кінець стержня 22 має конусну форму і має контакт із заглибленням, яке утворене на зовнішній поверхні диска 19. 64638 4 Між корпусом 18 та кронштейном 16, на напрямних стержня 17 встановлено пружини 26. На кронштейні 16 (на одному) встановлено рухомий 27, а на корпусі 18 - нерухомий 28 контакти сигнальних ламп (не показані), які розміщені на пульті керування крана (фіг. 2). Контакт 28 складається із двох частин: контакта 29 - зеленої лампочки (нормальна робота) та контакта 30 - червоної лампочки (перевантаження). На одному із кронштейнів 16 встановлено рухомий 31, на корпусі візка 4 - два нерухомих 32 і 33 контакти вмикання приводу гвинтового механізму: гайок 9 і 10, гвинта 6, який встановлено в корпусах 5 (фіг. 2). Привод гвинтового механізму складається із мотор-редуктор 34, муфти 35 (фіг. 2). Приводний візок 4, у верхній частині закріплений на кінці каната 36, другий кінець якого закріплено на барабані 37 механізму підйому візка та вантажу (фіг. 1,4). У верхній частині стріли канат 36 огинає напрямні ролики 38 (фіг. 1). У нижній частині пересувний візок закріплений на кінці каната 39, який огинає напрямний ролик 40, другим кінцем канат закріплений на барабані 37 та укладений у протилежному напрямку, відносно каната 36 (фіг. 1,4). Механізм підйому візка та вантажу складається із двигуна 41, вал якого за допомогою муфти 42 з'єднаний із вхідним валом редуктора 43, який має два вихідних вали (фіг. 4) На одному із валів встановлено барабан 44, на якому закріплено кінець каната 45 для підйому вантажу. Другий кінець каната 45, який огинає блок вантажозахватного органа 13, закріплено на стрілі 1. Другий вал редуктора за допомогою муфти 46 з'єднаний із валом барабана 37, який встановлено в корпусах підшипників 47. Механізм підйому оснащено колодковим гальмом 48, а гвинтовий механізм - запобіжною муфтою 49. Заспокоювач вантажозахватного органа працює таким чином. Вантаж, який підлягає переміщенню закріплюють на вантажозахватному органі 13. За допомогою електродвигуна 41, редуктора 43, барабана 44 вантаж підвішують на канаті 45 на незначній висоті і вимикають привод. Вмикають мотор-редуктор 34 і приводять у обертальний рух гвинт 6. При цьому гайки 9 і 10 переміщуються вздовж осі гвинта: гайка 9 рухається праворуч, а гайка 10 - ліворуч. Переміщення гайок забезпечує натяжіння відтяжних канатів 12 та зміщує вантажозахватний орган із вантажем на кут відносно вертикальної осі. При цьому складова сили тяжіння G вантажу, сила Gsin забезпечує постійний натяг відтяжних канатів, фіксацію вантажу у просторі та унеможливлює його коливання у площині стріли крана. У процесі натяжіння канатів 12, осьова складова Fa сили натягу канатів переміщує напрямні ролики 14 разом із кронштейном 16 вздовж осі напрямних стержнів 17 та стискає пружини 26 (фіг. 2,3). Пружини розраховані на певну силу стиску, величина якої стала і розрахована на піднімання вантажу у певному діапазоні його ваги. При досягненні цієї граничної величини, стиснуті пружини забезпечують з'єднання контактів 27 та 29. у ре 5 зультаті чого на пульті керування загоряється сигнальна зелена лампа (не показано) і оператор вимикає привод гвинта 6. Це свідчить про готовність механізмів до роботи та можливість виконання операції підйому вантажу. У випадку підйому вантажу із мінімальною вагою, для досягнення граничної сили стиску пружини - збільшують кут відхилення вантажу від вертикальної осі. У процесі руху гайки 10 вздовж осі гвинта 6, рухомий контакт 31, закріплений на кронштейні 16 долає відстань "а" між ним та нерухомими контактами 32 та 33 і рухається паралельно їхньої поверхні. Зазор «Δ» між контактами забезпечує осьова складова сили натягу канатів, яка переміщує напрямні ролики 14 вздовж осі напрямних стержнів 17. При досягненні граничного значення сили стиску пружини оператор вимикає привод гвинта, гайки 9 і 10 зупиняються, а зазор «Δ» між контактами зберігається. Після цього, керування приводом гвинтового механізму здійснюється в автоматичному режимі. Для підйому вантажу вмикають електродвигун 41 і завдяки редуктору 43 приводять в обертальний рух барабани 44 і 37. Намотування каната 45 на барабан 44 забезпечує піднімання вантажозахватного органа 13 із вантажем, а намотування каната 36 на барабан 37 забезпечують піднімання візка 4 із гвинтовим механізмом та механізмом регулювання натягу відтяжних канатів. У процесі підйому візка канат 39 розмотується із барабана 37 і забезпечує його вільний підйом. Під часу підйому вантажу, траєкторія руху візка 4 і траєкторія руху вантажу можуть не співпадати: прямолінійні, але не паралельні траєкторії рухомих елементів (фіг. 1). У такому випадку кут кут зміщення вантажозахватного органа від вертикальної осі буде зменшуватись, відповідно буде зменшуватися сила натягу відтяжних канатів 12 та осьова складова Fa цієї сили. Це зменшує тиск на пружини 26 і дає можливість пружинам збільшити свою довжину та перемістити кронштейни 16 із роликами 14 та контактом 31 вздовж осі напрямних стержнів 17 на певну відстань, відносно попереднього положення. Якщо ця відстань перевищує величину зазору «Δ» між контактами 31 та 33, тоді відбувається замикання цих контактів, в наслідок чого вмикається привод гвинтового механізму мотор-редуктор 34. Гайки 9 і 10 починають рухатися вздовж осі гвинта 6, у напрямку корпусів 5 і збільшують силу натягу у відтяжних канатах 12 до необхідної величини, за рахунок досягнення попереднього значення кута . При цьому сила стиску пружини 26 знову досягає граничної величини, пружини стискаються до граничного розміру, а кронштейн 16 із роликами 14 переміщується у бік гайки 10. Між контактами 31 та 33 знову утворюється зазор «Δ», привод гвинтового механізму вимикається автоматично. Під час підйому вантажу у відтяжних канатах весь час підтримується постійна сила натягу, яка унеможливлює коливання вантажу у площині стріли крана. Для спуску вантажу, двигун 41 вмикають у реверсний режим. Канат 45 сходить із барабана 44, а канат 36 із барабана 37, що забезпечує плавний спуск вантажозахватного органа 13 із вантажем та 64638 6 пересувного візка 4 із гвинтовим механізмом та механізмом регулювання натягу відтяжних канатів 12. При цьому канат 39 буде намотуватися на барабан 37, що забезпечує рівномірний поступальний рух візка, при будь-яких кутах нахилу стріли крана. Під час підйому вантажу, для утримання заданого кута та, відповідно граничної сили натягу канатів 12, відстань між вантажозахватним органом 13 та напрямними роликами 14 скорочувалася, за допомогою дії механізму регулювання натягу канатів. Під час спуску вантажу довжина каната 45, на якому встановлено вантажозахватний орган 13 із вантажем зростає, а відстань між вантажозахватним органом та напрямними роликами 14 залишається мінімальною і незмінною. Внаслідок цього, траєкторія руху при спуску вантажозахватного органа із вантажем відрізняється від траєкторії підйому вантажу. При незмінній довжині відтяжних канатів 12 та збільшені довжини каната 45 кут значно збільшується, у порівнянні із необхідним, відповідно зростає величина сили Gsin натягу канатів 12. При зростанні сили натягу канатів зростає і осьова складова Fa цієї сили, яка діє на напрямні ролики 14. Під дією цієї сили, яка перевищує за величиною граничну силу стиску пружин 26, ролики 14 разом із кронштейном 16 переміщуються вздовж осей напрямних стержнів 17, у бік корпуса 18 (фіг. 3). Значне переміщення кронштейна 16 забезпечує потрапляння головки стержня 22 у розширену зону напрямної канавки 25. При цьому, пружина 23 виштовхує стержень на зовні і він виходить із заглиблення у диску 19, після чого диск продовжує під дією осьової сили Fa переміщуватися у внутрішній частині корпуса 18, стискаючи пружину 20. Такий самий рух здійснює і другий кронштейн 16 із роликом 14. У процесі руху кронштейна 16 під дією надлишкової осьової сили, контакт 27, який до цього був з'єднаний із контактом 29 (зелена лампочка на пульті), переміщується разом із кронштейном до контакта 30 (червона лампочка - перевантаження) (фіг. 2). При досягненні осьової сили критичного значення, контакт 31, закріплений на кронштейні 16 дотикається контакта 32, внаслідок чого моторредуктор 34 вмикається у реверсному режимі. При цьому гайка 9 і 10 переміщується до середини гвинта 6, збільшуючи при цьому відстань між вантажозахватним органом 13 та напрямними роликами 14, відповідно зменшуючи кут і величину осьової сили, яка діє на ролики. Коли осьова сила досягає значення, близького до граничного (нормального), пружина 20 переміщує диски 19 у вихідне положення, а диски переміщують кронштейн 16 із роликами 14 також у вихідне положення. При цьому відбувається фіксація диска 19 за допомогою стержня 22, контакти 31 і 32 розмикаються, зупиняють мотор-редуктор 34, а контакт 27 дотикається контакта 29 і на пульті керування підйому електродвигун 41, залишаючи вантаж у підвішеному стані на незначній відстані від поверхні і вмикає мотор-редуктор 34 у реверсному режимі. При цьому гайки 9 і 10 максимально наближаються до середини гвинта 6, внаслідок чого відтяжні канати 7 послаблюються і вантаж стає підвішеним вертикально, кут = 0. При переміщенні гайок 9 і 10 до середини гвинта контакт 31 виходить за межі поверхні контактів 32 і 33, тому значне зменшення осьової сили не може спричинити вмикання привода гвинтового механізму у автоматичному режимі. Вмикаючи двигун 41, оператор завершує операцію по спуску вантажу на розвантажувальну поверхні. Комп’ютерна верстка І. Скворцова 64638 8 Отже, дана корисна модель дає можливість скоротити час спрацьовування пристрою для регулювання натягу відтяжних канатів у момент виникнення коливань вантажу у площині стріли, під час його підйому-спуску, незалежно від маси вантажу, кута відхилення вантажу від вертикальної осі та кута нахилу стріли і за рахунок цього підвищити продуктивність крана. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDamper of load-handling device
Автори англійськоюLoveikin Viacheslav Serhiiovych, Rybalko Viacheslav Mykolaiovych, Melnychenko Viacheslav Viktorovych, Popskyi Bohdan Mykhailovych
Назва патенту російськоюУспокоитель грузозахватного органа
Автори російськоюЛовейкин Вячеслав Сергеевич, Рыбалко Вячеслав Николаевич, Мельниченко Вячеслав Викторович, Попский Богдан Михайлович
МПК / Мітки
МПК: B66C 13/06, B66D 3/00
Мітки: заспокоювач, органа, вантажозахватного
Код посилання
<a href="https://ua.patents.su/4-64638-zaspokoyuvach-vantazhozakhvatnogo-organa.html" target="_blank" rel="follow" title="База патентів України">Заспокоювач вантажозахватного органа</a>
Стенд для дослідження навантажувальної здатності гвинтового робочого органа
Номер патенту: 30397
Опубліковано: 25.02.2008
Автори: Чвартацький Роман Ігорович, Гевко Іван Богданович
МПК: B65G 33/00
Мітки: навантажувальної, здатності, гвинтового, стенд, дослідження, органа, робочого
Формула / Реферат:
Стенд для дослідження навантажувальної здатності гвинтового робочого органу, який виконано у вигляді рами, механізму приводу, труби, в яку встановлено гвинтовий робочий орган, штатива, механізму навантаження, вимірювальних пристроїв з підставкою у вигляді напрямних типу ластівчина хвоста, який відрізняється тим, що лівий кінець гвинтового робочого органа жорстко закріплено до приводного вала механізму приводу, а правий кінець вала гвинтового...
Оправка для профілювання секцій гнучкого гвинтового робочого органа
Номер патенту: 15699
Опубліковано: 17.07.2006
Автор: Новосад Іван Ярославович
МПК: B23B 5/00
Мітки: оправка, гвинтового, гнучкого, робочого, органа, профілювання, секцій
Формула / Реферат:
Оправка для профілювання секцій гнучкого гвинтового робочого органа, що виконана у вигляді ступінчастого вала, на якому жорстко закріплена секція гвинтового робочого органа, що містить гвинтову спіраль, ліву і праву крайні втулки, лівий торець якої взаємодіє з ступінчастим виступом ступінчастого вала, а другий правий торець секції гвинтового робочого органа взаємодіє з затиснутим механізмом, яка відрізняється тим, що секція гвинтового...
Стояк ґрунтообробного робочого органа культиватора
Номер патенту: 13771
Опубліковано: 17.04.2006
Автор: Атрощенко Володимир Іванович
МПК: A01B 59/00
Мітки: ґрунтообробного, культиватора, робочого, органа, стояк
Формула / Реферат:
Стояк ґрунтообробного робочого органа культиватора, що виконаний гнутим, а частина його з боку робочого органа має С-подібну форму, який відрізняється тим, що поперечний переріз стояка складає 50х50 мм на довжині до місця кріплення робочого органа.
Вузол редуктора трансмісії робочого органа
Номер патенту: 21094
Опубліковано: 15.02.2007
Автор: Ісмаілов Адалет Кіпой огли
МПК: B64C 27/00
Мітки: трансмісії, робочого, редуктора, вузол, органа
Формула / Реферат:
Вузол редуктора трансмісії робочого органа, що містить планетарний редуктор та трансмісійний механізм, який відрізняється тим, що додатково оснащений кривошипним механізмом, виконаним у вигляді з'єднаних шарнірами з колінчастим валом тросами та стержневими опорами противаг, при цьому стержневі опори розташовані в циліндричних стаканах, жорстко з'єднаних з корпусом, виконаним у вигляді рами.
Спосіб пуску ланцюгового тягового органа гірничої машини та привід ланцюгового тягового органа гірничої машини
Номер патенту: 85277
Опубліковано: 12.01.2009
Автори: Висоцький Геннадій Васильович, Ковальчук Олександр Миколайович, Литвак Грігорій Алєксандровіч, Леусенко Анатолій Васильович, Рікман Ігорь Владіміровіч, Потапов Ігор Григорович, Ограпішвілі Георгій Вахтангович
МПК: E21C 31/00, B65G 23/00, H02K 7/16
Мітки: машини, спосіб, привід, тягового, пуску, органа, гірничої, ланцюгового
Формула / Реферат:
1. Спосіб пуску ланцюгового тягового органа подачі гірничої машини з диференціальним редуктором, що містить ступінь з диференціальним механізмом, що полягає у розгоні електричного двигуна приводу ланцюгового тягового органа подачі гірничої машини до номінального значення робочої характеристики за відсутності гальмівного моменту на зовнішньому центральному колесі диференціального механізму з наступним підключенням кінематичного ланцюга приводу...
Попередній патент: Спосіб корекції ліпідного обміну в організмі курей
Наступний патент: Гальмівна важільна передача тривісного візка
Випадковий патент: Спосіб виготовлення гіпсових виробів з фосфогіпсу