Спосіб отримання сил тяги
Формула / Реферат
Спосіб отримання сил тяги, в якому два повзуни, які посаджені на напрямну і кожний з яких з’єднаний з віссю індивідуального ролика, який встановлений на свою клинову поверхню клина, навантажують двома однаковими по величині, спрямованими по осі напрямної у протилежні напрями притискаючими ролики до клина, силами, при цьому кожну притискаючу силу розділяють відповідною перекітною парою на нормальну складову, яка клином сприймається, і на тангенціальну складову, яка клином не сприймається, який відрізняється тим, що як повзуни використовують два механізми, елементи яких і вектори сили у яких розташовані дзеркальносиметрично, з загальним для двох механізмів клином, клинові поверхні якого виконані у формі дуг, і направляючими двох механізмів, які зв’язані між собою пружним елементом повороту, під дією тангенціальних складових ролики перекочують по поверхнях клина та повертають направляючі навколо осі пружного елемента, чим деформують пружний елемент, у якому виникають два внутрішніх до пружного елемента реактивних крутних моменти, кожний з яких з відповідним йому крутним моментом, утвореним тангенційними складовими, взаємно знищується.
Текст
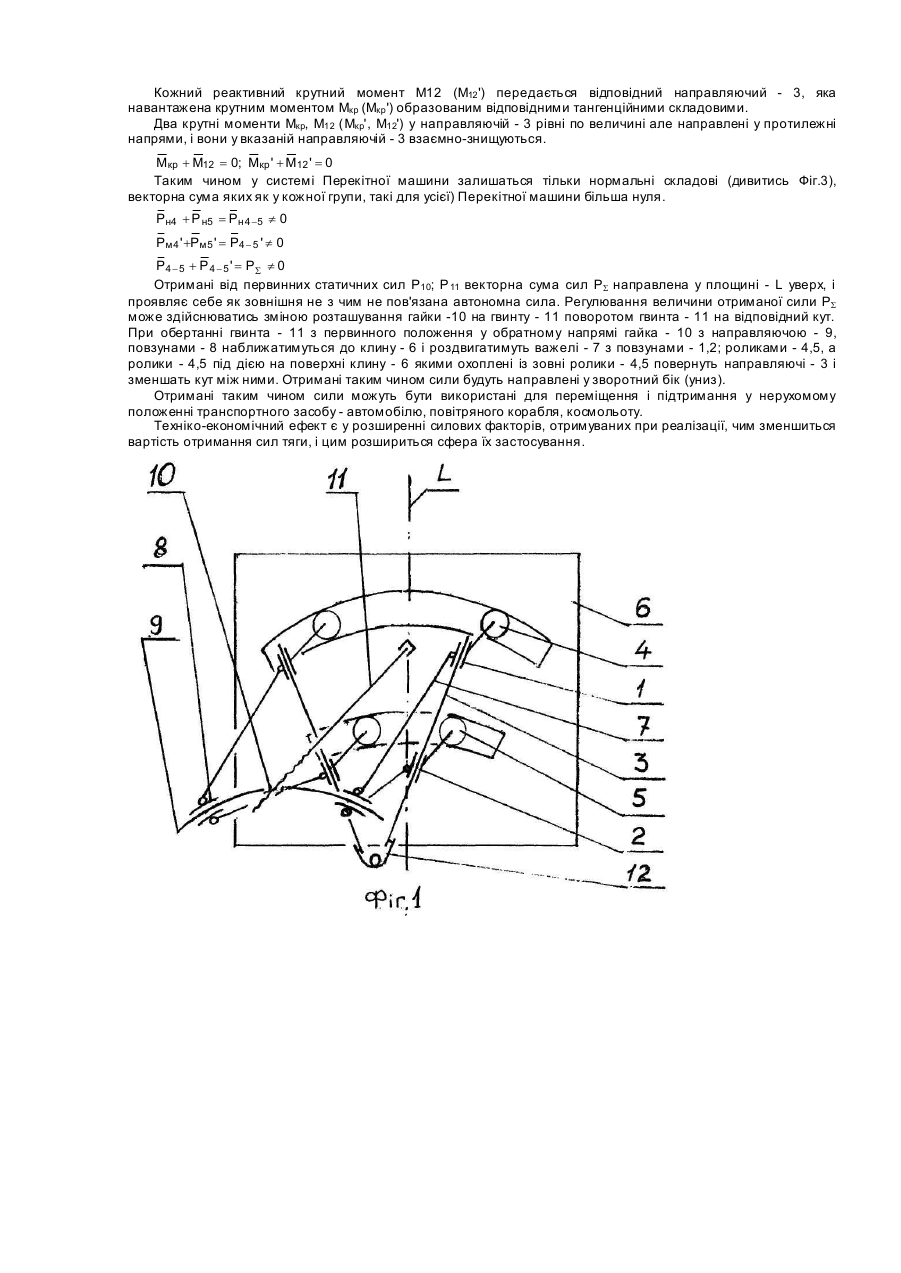
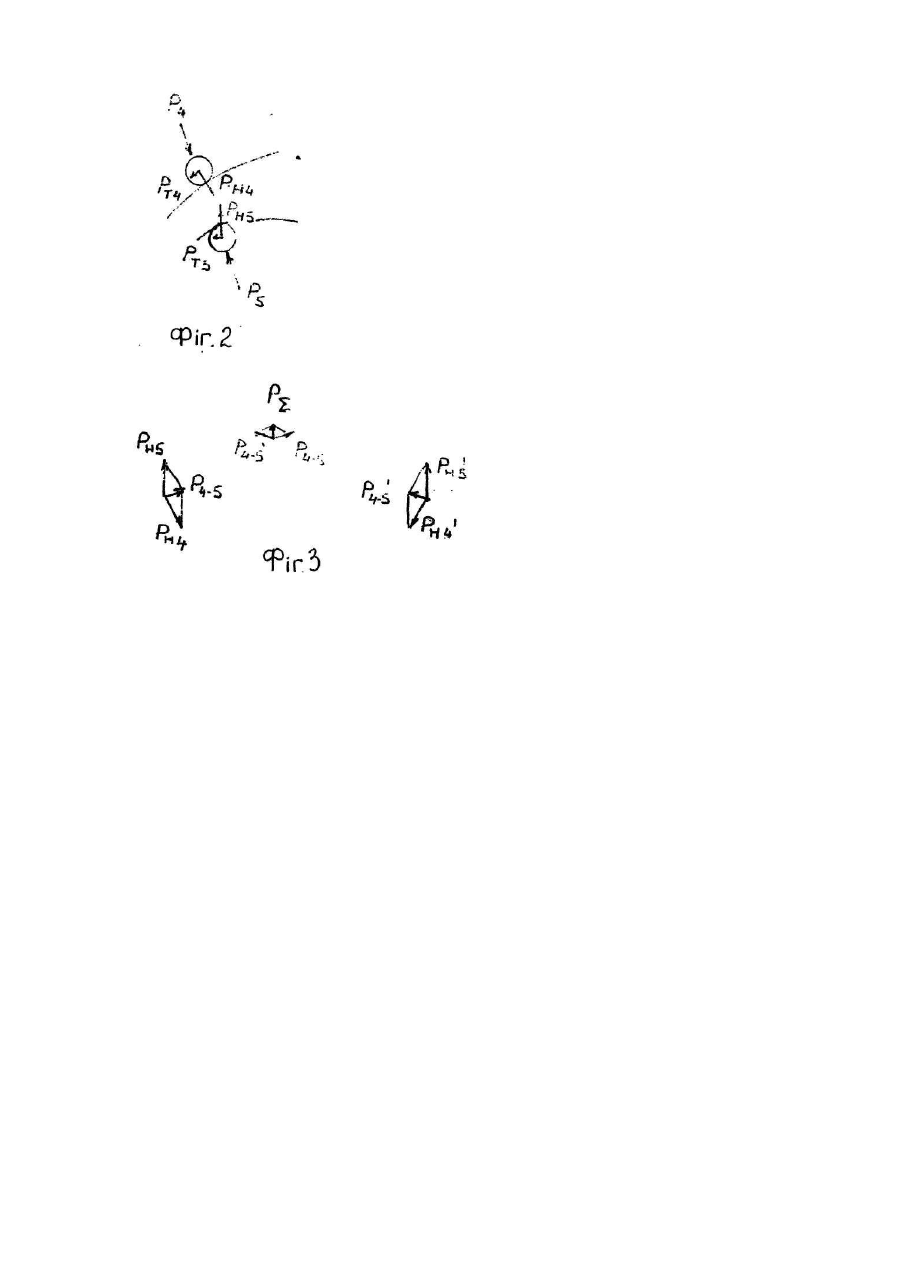
Винахід відноситься до пристроїв отримання сил тяги, які перетворюють внутрішні сили у зовнішні сили. Загально відомий спосіб отримання сил тяги ракетного реактивного двигуна, в якому, у камері згоряння підвищують внутрішню енергію робочого тіла - газу, для чого спалюють паливо в окислювачі, а далі робоче тіло (газоподібні продукти згоряння) випускають через сопло, у якому завдяки перепаду тиску і зменшенню площі поперечного перетину у соплі по напряму з камери згоряння - збільшують швидкість витікання робочого тіла від нуля до швидкості звуку, а далі завдяки збільшенню площі поперечного перетину у соплі по напряму з камери згоряння - збільшують швидкість витікання робочого тіла вище швидкості звуку (і при цьому на стінках сопла отримують силу тяги - перетворюють внутрішні сили у зовнішні, для системи ракетного реактивного двигуна, сили). Детальніше дивитись книгу під редакцією Б.М. Яворського, А.А. Пінського «Основы физики. Том 1» «Механика. Молекулярная физика. Электродинамика». М. На ука 1981. дивитись § 30.10 "Сопло" на ст.282, 283, дивитись § 15,4 "Реактивное движение" на ст. 128, 129 (все по російськи). Загальновідомий спосіб отримання сил тяги ракетного реактивного двигуна реалізований у сучасних машинах - ракетах і космольотах, і є аналогом. Недоліком аналогу є розхід робочого тіла і підвищення внутрішньої енергії робочого тіла. Наслідком розходу робочого тіла є обмежена автономність отримання сили тяги, результатом якої є обмежена можливість у використанні ракети і космольота. Наслідком підвищення внутрішньої енергії робочого тіла є вибухо-пожежнонебезпечність первинних компонентів робочого тіла, і негативний вплив первинних компонентів і самого робочого тіла на навколишнє середовище, результатом яких є низькі техніко-економічні показники отримання сили тяги, і необхідність обмеженого застосування сили тяги. Підсумком недоліків з їх наслідками і їх результатами є обмеження сфери застосування сил тяги. Відомі способи отримання сил тяги і крутного моменту Зарядо-інерційних і Потенціало-інерційних машин, у яких (у Зарядо-інерційних машинах) гравітаційні заряди-грузи переміщують по визначеним траєкторіям у визначених швидкісних режимах і фазах р уху ( і при цьому на опорах валів отримують сили тяги, а на флянцях валів отримують крутні моменти-перетворюють сили інерції у зовнішні для системи зарядо-інерційної машини, сили і пари сил), і у яких (у потенціало-інерційних машинах) елементи навантажені внутрішніми силами переміщують по визначеним траєкторіям у визначених швидкісних режимах і фазах р уху (і при цьому на флянцях валів отримують крутні моменти - перетворюють внутрішні сили у зовнішні, для системи Потенціалоінерційної машини, пари сил). Детальніше дивитись опис винаходів до патентів України UA-35818А "Спосіб отримання внутрішніх неврівноважених сил" (сили тяги), UA-45581A "Спосіб перетворення сил і інерції у крутний момент" (крутний момент), - обидві - Зарядо-інерційні машини, UA-35775А "Спосіб отримання позитивної роботи циклу кривошипно-шатунного механізму двигуна з термодинамічно-ізольованим циліндром" (крутний момент) остання Потенціало-інерційна машина. Спосіб отримання сил тяги і крутного моменту Зарядо-інерційних і Потенціало-інерційних машин є близьким аналогом. Недоліком близького аналогу є роздільне отримання крутного моменту (обертання) у Зарядо-інерційній або Потенціало-інерційній машині з перетворенням обертання у сили тяги у Зарядо-інерційній машині, і використання сил інерції для роботи Зарядо-інерційних і Потенціало-інерційних машинах. Наслідком роздільного отримання і перетворення є необхідність застосування Зарядо-інерційної або Потенціало-інерційної машини у якості джерела обертання, з необхідністю застосування Зарядо-інерційної машини у якості перетворювача обертання у сили тяги, результатом якого є складність самого пристрою отримання сили тяги (хоча і без недоліків аналогу)· Наслідком використання сили інерції для роботи є необхідність застосування допоміжного агрегату пристрою запуску джерела обертання, результатом якого є складність усієї машини вцілому - пристрою отримання сил тяги. Підсумком недоліків з їх наслідками і їх результатами є низькі техніко-екомічні показники отримання сил тяги у Зарядо-інерційних - Потенціало-інерційних машинах. Інших способів отримання сил тяги, які реалізовані у сучасних машинах, таких як ракети і космольоти, або які відомі з сучасної технічної літератури, такі як Зарядо-інерційні і Потенціало-інерційні машини - потеперішній час невідомо. Загальновідомий спосіб отримання сил, який є прототипом, у якому два повзуни, які посаджені на направляючу, кожний з яких з'єднаний з віссю індивідуального ролика, який встановлений на свою клинову поверхню клину, навантажують двома, однаковими по величині, направленими по осі направляючої у протилежні напрями, притискаючими ролики до клину силами при цьому кожну силу розділяють відповідною перекітною парою (ролик-клин) на нормальну складову, яку клином сприймають, і на тангенційну складову, яку клином не сприймають, але дії якої направлені на навантаження направляючої і перекочування роликів по клину (і при цьому на клину отримують перемішуючі внутрішні, для системи з вказаних елементів, сили перетворюють внутрішні притискачі сили у внутрішні сили). Детальніше дивитись книгу під редакцією A.M. Малого "Справочник технолога - машиностроителя. Том 2" М. Машиностроение. 1972. Дивитись табл. На стр.94, друга фігура зверху у правій колонці "Зажимные приспособления» (все по російськи). Недоліком загальновідомого способу отримання сил є обмеженість силових факторів, отримуваних у наслідок його реалізації. Так первинні внутрішні притискачі сили не представляється можливим перетворити у зовнішні сили - сили тяги, так як загальновідомий механізм перекітного клинового зажиму, який його реалізує, тільки для його реалізації і призначений. Наслідком недоліку прототипу є неможливість його застосування для відкритих систем, результатом якого є необхідність застосування для відкритих систем тільки аналогу або близького аналогу (з їх недоліками). В основу винаходу поставлено задачу розширення силових факторів, отримуваних у наслідок реалізації Способу отримання сил тяги, у якому два повзуни, які посаджені на направляючу, кожний з яких з'єднаний з віссю індивідуального ролика, який встановлений на свою клинову поверхню клину, навантажують двома однаковими по величині, направленими по осі направляючої у протилежні напрями притискаючими роликами до клину силами, при цьому кожну притискаючу силу розділяють відповідною перекітною парою на нормальну складову, яку клином сприймають, на тангенційну складову, яку клином не сприймають, завдяки застосуванню двох аналогічних механізмів, елементи яких і вектори сил у яких розташовані дзеркальносиметрично, з загальним для двох механізмів клином, клинові поверхні якого виконані у формі дуг, і направляючи двох механізмів, які пов'язані між собою пружним елементом повороту, під дією тангенційних складових ролики перекочують по поверхням клину та повертають направляючи навколо осі пружного елементу чим деформують пружний елемент, у якому виникають два внутрішніх до пружного елементу реактивних крутних моменти, кожний з яких з відповідним йому крутним моментом, який образований тангенційними складовими, взаємно-знищують, чим забезпечують векторну величину залишених нормальних складових більшу нуля отримують сили аналогічні по дії зовнішніми силами, і за рахунок того підвищують те хніко-економічні показники отримання сил тяги. Поставлена задача вирішується Способом отримання сил тяги, у якому два повзуни, які посаджені на направляючу, кожний з яких з'єднаний з віссю індивідуального ролика, який встановлений на свою клинову поверхню клину, навантажують двома однаковими по величині, направленими по осі направляючої у протилежні напрями притискаючими ролики до клину силами, при цьому кожну притискаючу силу розділяють відповідною перекітною парою на нормальну складову, яку клином сприймають, і на тангенційну складову, яку клином не сприймають, стосовно винаходу використовують два аналогічних механізми, елементи яких і вектори сил у яких розташовані дзеркальносиметрично, з загальним для двох механізмів клином, клинові поверхні якого виконані у формі дуг, і направляючими двох механізмів, які пов'язані між собою пружним елементом повороту, під дією тангенційних, складових ролики перекочують по поверхням клину та повертають направляючі навколо осі пружного елементу, чим деформують пружний елемент у якому виникають два внутрішніх до пружного елементу реактивних крутних моменту, кожний з яких з відповідним йому крутним моментом який образований тангенційними складовими, взаємно-знищують. Спосіб отримання сил тяги реалізують у Перекітних машинах, аналогічних представленій. Винахід пояснюється графічними матеріалами, на яких показані: на Фіг.1 - схема будови Перекітної машини, на Фіг.2, Фіг.3 - схема сил, діючих у Перекітній машині. У Перекітну машину (дивитись Фіг.1) включені дві групи елементів, розташованих дзеркальносиметрично, перша до другої, відносно площини - L, у кожній групі - повзуни - 1, 2 посаджені на направляючу - 3, повзун - 1 з'єднаний з віссю ролика - 4, повзун - 2, з'єднаний з віссю ролика - 5, ролики - 4,5 встановлені на клин - 6, клин - 6 виконаний у вигляді товстостінного листу, у якому розташовані пази у вигляді дуг, верхній - з меншим радіусом осі пазу, в нього встановлений ролик - 4, і нижній - з більшим радіусом осі пазу, в нього вставлений ролик - 5, повзуни - 1,2 шарнірно-з'єднані індивідуальними важелями - 7 з повзуном - 8, який посаджений на направляючу - 9 вісь якої виконана у формі дуги , направляюча - 9 з'єднана з гайкою - 10, у яку вкручений гвинт - 11, який з'єднаний підшипниковим вузлом з клином - 6, направляюча - 3 з'єднана з пружиною скручування 12, при цьому для двох груп елементів клин - 6, направляюча - 9, гайка - 10, гвинт - 11 пружина - 12 - спільні, з можливістю повороту гвинта - 11 навколо своєї осі відносно гайки -10, з переміщенням гайки - 10 з направляючою - 9 і повзунами - 8 вздовж осі гвинта - 11, з поворотом важелів - 7 кожного навколо осі свого шарніру з повзуном - 8 і переміщенням повзунів - 1,2 з роликами - 4,5 вздовж осей направляючих - 3, з перекочуванням роликів - 4,5 по клину - 6 і поворотом направляючих - 3 навколо осі пружини - 12, з поворотом кінців пружини - 12 і навантаженням всіх елементів силовими навантаженнями. Перекітна машина працює наступним чином. У первинному положенні елементи розташовані так, що пружина - 12 вільна, всі елементи розвантажені, і сили тяги відсутні. При повороті гвинта - 11 відносно гайки - 10 гайка - 10 з направляючою - 9 і повзунами - 8 переміщуються від клину - 6 (і від направляючих - 3). При цьому важелі - 2 повернуться кожний навколо свого шарніру з повзуном - 8 при якому кут між суміжними важелями - 7 зменшиться. Суміжні повзуни - 1,2 з роликами - 4,5 перемістяться по направляючих - 3 наблизившись, а суміжні ролики - 4,5 перекочуються по охоплюваним роликами - 4,5 поверхням клину - 6 і повернуть направляючі - 3 таким чином, що кут між осями направляючих 3 збільшиться. При цьому кінці пружини - 12 з'єднані з направляючими - 3 повернуться у пружині - 12 утворять два вн утрішніх до пружини - 12 реактивних крутни х моменти М12; М12'. Так як взаємне розташування елементів обумовлено розташуванням гайки - 10 відносно гвинт - 11 у гвинтовій парі - гайка - 10 - гвинт - 11 виникають статичні сили Р10; Р11 і векторна сума яких рівна нулю P10 + P11 = 0 Статична сила Р11 від гвинта - 11 передається клину - 6, а статична сила Р10 від гайки - 10 через направляючу - 9 повзуни - 8 важелі - 7 передається повзунам - 1,2 з роликами - 4,5. Ролики - 4,5 розташовані у пазах клину - 6 і у напряму осі гвинта - 11 їх переміщення блоковане клином - 6, і сила Р11 з гвинта - 11 через клин - 6, ролики - 4,5 передається повзунам - 1,2, і у повзунах - 1,2 векторна сума Р10, Р 11 також рівна нулю. Але так як важелі - 7 розташовані під кутом до лінії дії сили Р10 більшим нуля у них виникають крутні моменти, які навантажують повзуни - 1,2 притискаючими ролики - 4,5 до клину - 6 силами, лінії дії яких направлені по осям направляючих - 3. Перекітними парами ролик - 4 - клин - 6 і ролик - 5 - клин - 6 притискаючі сили Р4, P5, Р4', Р5' розділяють на нормальні складові Рн4, Рн4', Рн5', Рн5, які клином - 6 сприймають і на тангенційні складові Рт4, Рт4', Pт5', Рт5 , які клином - 6 не сприймають, але дії яких направлені на перекочування роликів - 4,5 по клину - 6 і поворот направляючих - 3 навколо осі пружини - 12 (дивитись Фіг.2). Але при повороті кінців пружини - 12 у пружині -12 виникає два внутрішні х до пружини - 12 реактивних крутних моменти – М12 ; М12'; векторна сума яких рівна нулю M12 + M12 ' = 0 Кожний реактивний крутний момент М12 (М12 ') передається відповідний направляючий - 3, яка навантажена крутним моментом Мкр (Мкр ') образованим відповідними тангенційними складовими. Два крутні моменти Мкр, М12 (Мкр', М12') у направляючій - 3 рівні по величині але направлені у протилежні напрями, і вони у вказаній направляючій - 3 взаємно-знищуються. Mкр + M12 = 0; Mкр ' + M12 ' = 0 Таким чином у системі Перекітної машини залишаться тільки нормальні складові (дивитись Фіг.3), векторна сума яких як у кожної групи, такі для усієї) Перекітної машини більша нуля. Рн4 + Р н5 = Рн 4 -5 ¹ 0 Рм 4 ' +Рм 5 ' = Р4 - 5 ' ¹ 0 Р4 - 5 + Р 4 - 5 ' = РS ¹ 0 Отримані від первинних статичних сил Р10; Р 11 векторна сума сил РS направлена у площині - L уверх, і проявляє себе як зовнішня не з чим не пов'язана автономна сила. Регулювання величини отриманої сили РS може здійснюватись зміною розташування гайки -10 на гвинту - 11 поворотом гвинта - 11 на відповідний кут. При обертанні гвинта - 11 з первинного положення у обратномунапрямі гайка - 10 з направляючою - 9, повзунами - 8 наближатимуться до клину - 6 і роздвигатимуть важелі - 7 з повзунами - 1,2; роликами - 4,5, а ролики - 4,5 під дією на поверхні клину - 6 якими охоплені із зовні ролики - 4,5 повернуть направляючі - 3 і зменшать кут між ними. Отримані таким чином сили будуть направлені у зворотний бік (униз). Отримані таким чином сили можуть бути використані для переміщення і підтримання у нерухомому положенні транспортного засобу - автомобілю, повітряного корабля, космольоту. Техніко-економічний ефект є у розширенні силових факторів, отримуваних при реалізації, чим зменшиться вартість отримання сил тяги, і цим розшириться сфера їх застосування.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod to obtain traction force
Автори англійськоюChuhui Volodymyr Leonidovych
Назва патенту російськоюСпособ получения сил тяги
Автори російськоюЧугуй Владимир Леонидович
МПК / Мітки
МПК: F03H 5/00
Мітки: сіль, тяги, отримання, спосіб
Код посилання
<a href="https://ua.patents.su/4-68593-sposib-otrimannya-sil-tyagi.html" target="_blank" rel="follow" title="База патентів України">Спосіб отримання сил тяги</a>
Спосіб підвищення повного імпульсу тяги рідинної реактивної рушійної установки на двокомпонентному паливі
Номер патенту: 67852
Опубліковано: 15.07.2004
Автори: Сергійчук Борис Васильович, Доброгорський Віктор Антонович, Драновський Володимир Йосипович, Аніщенко Вячеслав Михайлович, Борисенко Вячеслав Михайлович, Кавелін Сергій Сергійович, Кошкін Михайло Іванович, Попель Анатолій Михайлович
Мітки: установки, повного, спосіб, рушійної, рідинної, реактивної, імпульсу, паливі, двокомпонентному, тяги, підвищення
Формула / Реферат:
Спосіб підвищення повного імпульсу тяги рідинної реактивної рушійної установки на двокомпонентному паливі, заснований на збільшенні маси палива, подаваного в двигуни, який відрізняється тим, що після витрачання одного з компонентів палива двигуни підігрівають за допомогою автономних електронагрівачів до потрібної температури, потім подають у них гарантійний залишок невитраченого компонента палива, а для компенсації зниження тяги збільшують...
Спосіб регулювання тяги опалювального котла
Номер патенту: 2723
Опубліковано: 15.07.2004
Автор: Задорожний Дмитро Васильович
МПК: F23L 11/00
Мітки: котла, регулювання, опалювального, спосіб, тяги
Формула / Реферат:
Спосіб регулювання тяги опалювального котла, що включає надходження в димовий патрубок атмосферного повітря, який відрізняється тим, що регулювання тяги здійснюють шляхом циклічної пульсації продуктів згорання у димовому патрубку, при цьому температура газів на виході з димового патрубка не перевищує 60°С.
Спосіб спорудження пристрою для одержання енергії з використанням природної тяги
Номер патенту: 47193
Опубліковано: 15.06.2004
Автори: Гончаренко Микола Опанасович, Коваленко Ігор Анатолійович, Капуста Іван Романович
МПК: F03D 1/00, F03G 7/04, F03D 3/04
Мітки: пристрою, використанням, спосіб, одержання, природної, енергії, тяги, спорудження
Формула / Реферат:
Спосіб спорудження пристрою для одержання енергії з використанням природної тяги, що включає формування на місцевості повітроводу у вигляді сполучених між собою гірничих виробок із установленими на різних височинах повітрозабірною і витяжною частинами та установку всередині повітроводу перетворювача енергії природної тяги, який відрізняється тим, що попередньо на місцевості виділяють природні височини, вимірюють їх висоту, отримані величини...
Датчик тяги в топковому агрегаті
Номер патенту: 632
Опубліковано: 15.12.1993
Автор: Дуденко Віктор Тихонович
МПК: F23N 5/02
Мітки: топковому, датчик, тяги, агрегаті
Формула / Реферат:
Формула изобретенияДатчик тяги в топочном агрегате, содержащий корпус с соплом и биметаллический диск, отличающийся тем, что, с целью повышения точности настройки, в стенке корпуса выполнена резьба и диск укреплен в нем на этой резьбе с возможностью перемещения.
Спосіб визначення реактивної тяги гтд
Номер патенту: 12571
Опубліковано: 28.02.1997
Автори: Козлов Володимир Вікторович, Панін Владислав Вадимович, Дмитріев Сергій Олексійович, Моісеев Борис Михайлович
МПК: G01M 15/14
Мітки: реактивної, тяги, спосіб, визначення, гтд
Формула / Реферат:
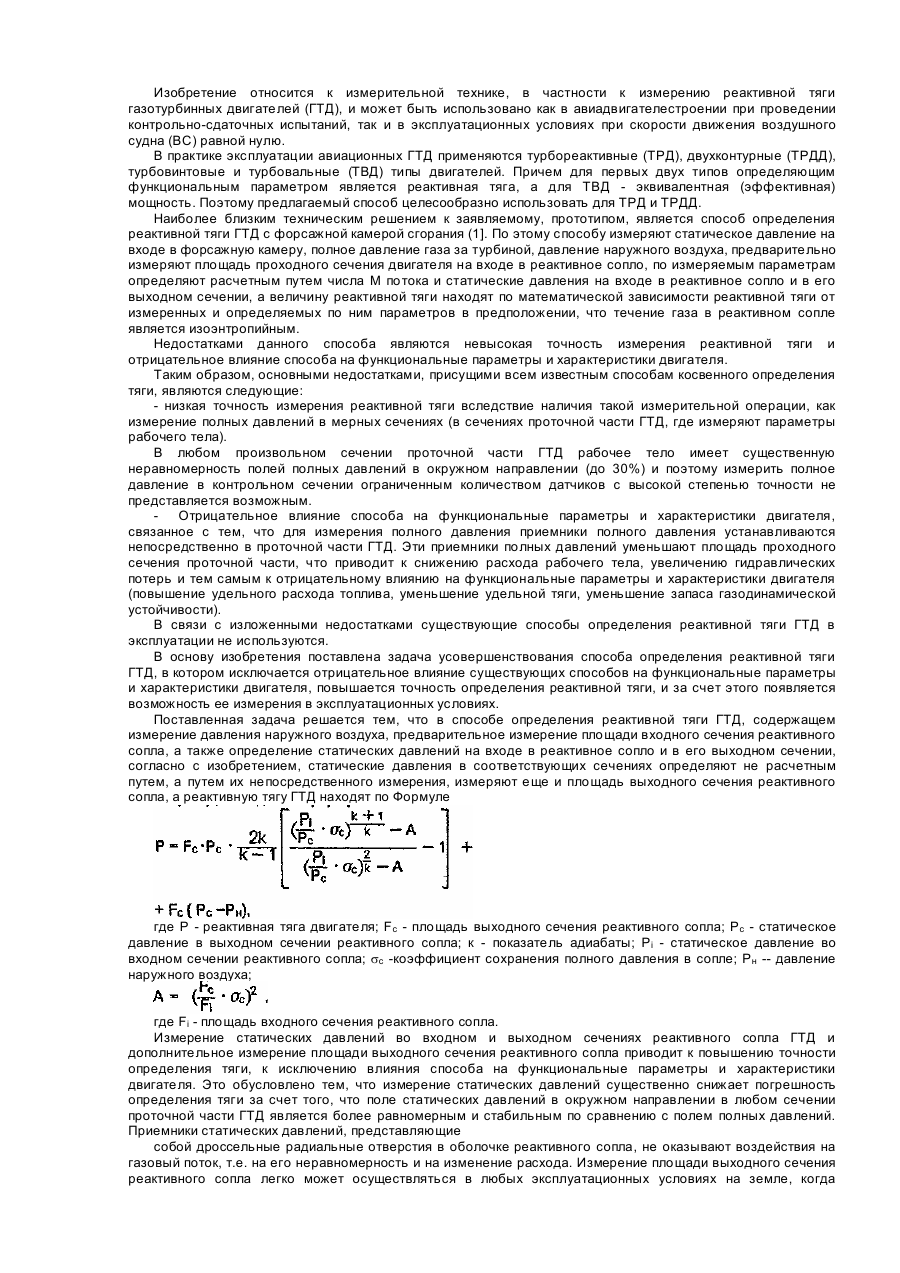
Способ определения реактивной тяги ГТД, при котором измеряют давление, наружного воздуха и площадь входного сечения сопла, а также находят статические давления во входном и выходном сечениях путем непосредственного их измерения, кроме того, измеряют площадь выходного сечения реактивного сопла, а реактивную тягу ГТД вычисляют по формуле:где Р - реактивная тяга двигателя; fс - площадь выходного сечения реактивного...