Спосіб адаптивного частотного керування асинхронним двигуном
Номер патенту: 68806
Опубліковано: 10.04.2012
Автори: Петрикович Юрій Ярославович, Іскерський Іван Станіславович, Федорейко Валерій Степанович, Луцик Ірина Богданівна, Рутило Микола Іванович

Формула / Реферат
Спосіб адаптивного частотного керування асинхронним електродвигуном, що забезпечує енергоефективне його регулювання шляхом формування оптимальної величини напруги статора, який відрізняється тим, що ця величина розраховується за відхиленням напруги, яке пропорційне різниці активної і реактивної складових потужності електродвигуна, в залежності від його механічного навантаження.
Текст
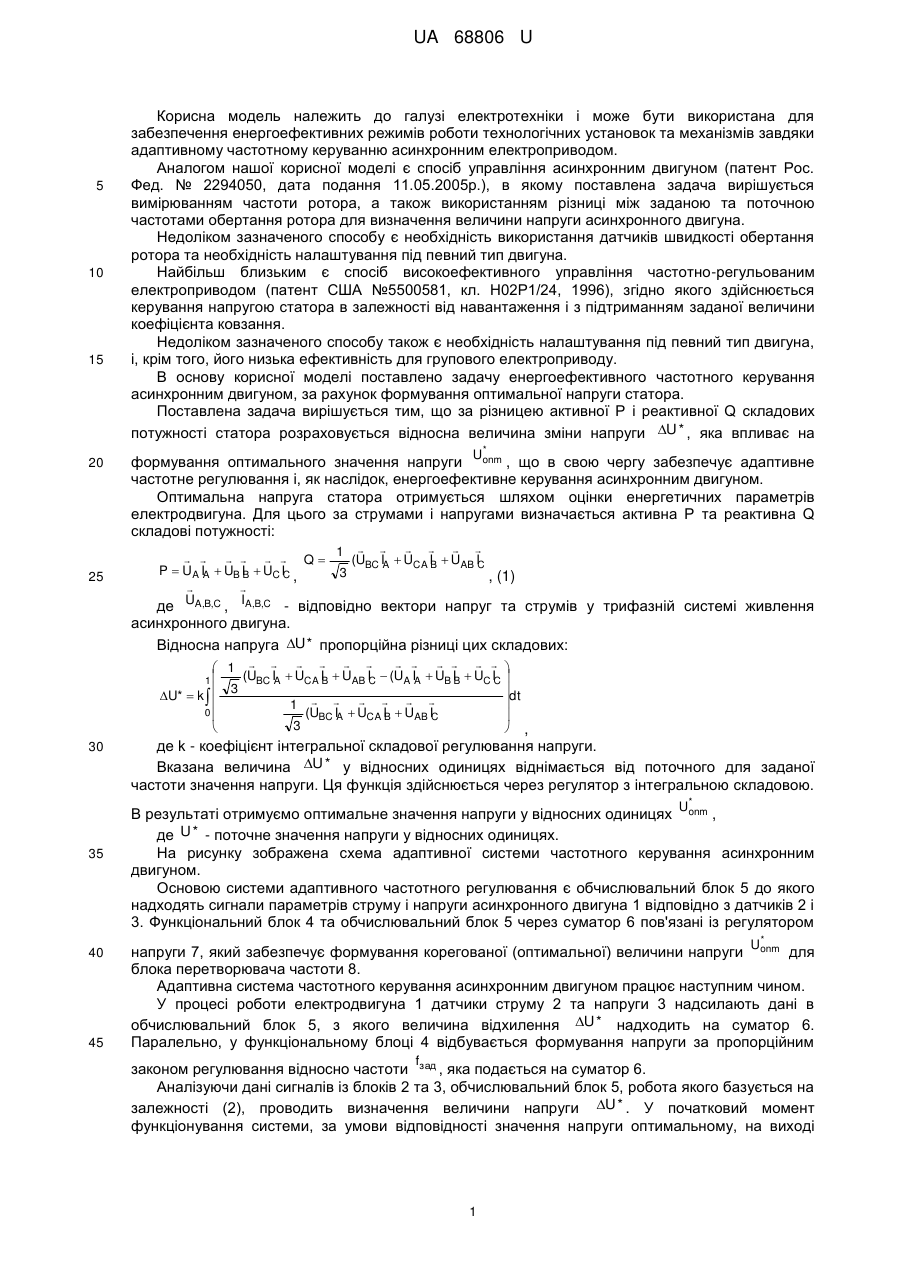
Реферат: Спосіб адаптивного частотного керування асинхронним електродвигуном включає формування оптимальної величини напруги статора. Величину напруги статора розраховується за відхиленням напруги. UA 68806 U (54) СПОСІБ АДАПТИВНОГО ЧАСТОТНОГО КЕРУВАННЯ АСИНХРОННИМ ДВИГУНОМ UA 68806 U UA 68806 U 5 10 15 20 25 Корисна модель належить до галузі електротехніки і може бути використана для забезпечення енергоефективних режимів роботи технологічних установок та механізмів завдяки адаптивному частотному керуванню асинхронним електроприводом. Аналогом нашої корисної моделі є спосіб управління асинхронним двигуном (патент Рос. Фед. № 2294050, дата подання 11.05.2005р.), в якому поставлена задача вирішується вимірюванням частоти ротора, а також використанням різниці між заданою та поточною частотами обертання ротора для визначення величини напруги асинхронного двигуна. Недоліком зазначеного способу є необхідність використання датчиків швидкості обертання ротора та необхідність налаштування під певний тип двигуна. Найбільш близьким є спосіб високоефективного управління частотно-регульованим електроприводом (патент США №5500581, кл. Н02Р1/24, 1996), згідно якого здійснюється керування напругою статора в залежності від навантаження і з підтриманням заданої величини коефіцієнта ковзання. Недоліком зазначеного способу також є необхідність налаштування під певний тип двигуна, і, крім того, його низька ефективність для групового електроприводу. В основу корисної моделі поставлено задачу енергоефективного частотного керування асинхронним двигуном, за рахунок формування оптимальної напруги статора. Поставлена задача вирішується тим, що за різницею активної P і реактивної Q складових потужності статора розраховується відносна величина зміни напруги U * , яка впливає на U* формування оптимального значення напруги onm , що в свою чергу забезпечує адаптивне частотне регулювання і, як наслідок, енергоефективне керування асинхронним двигуном. Оптимальна напруга статора отримується шляхом оцінки енергетичних параметрів електродвигуна. Для цього за струмами і напругами визначається активна P та реактивна Q складові потужності: Q 1 (UBC IA UCA I UAB IC B P UA IA UB I UC I , 3 B C , (1) UA,B,C IA,B,C де , - відповідно вектори напруг та струмів у трифазній системі живлення асинхронного двигуна. Відносна напруга U * пропорційна різниці цих складових: (UBC IA UCA I UAB I (UA IA UB I UC I B C B C dt U* k 3 1 0 (UBC IA UCA I UAB I B C 3 , 1 1 30 де k - коефіцієнт інтегральної складової регулювання напруги. Вказана величина U * у відносних одиницях віднімається від поточного для заданої частоти значення напруги. Ця функція здійснюється через регулятор з інтегральною складовою. U* 35 40 45 В результаті отримуємо оптимальне значення напруги у відносних одиницях onm , де U * - поточне значення напруги у відносних одиницях. На рисунку зображена схема адаптивної системи частотного керування асинхронним двигуном. Основою системи адаптивного частотного регулювання є обчислювальний блок 5 до якого надходять сигнали параметрів струму і напруги асинхронного двигуна 1 відповідно з датчиків 2 і 3. Функціональний блок 4 та обчислювальний блок 5 через суматор 6 пов'язані із регулятором U* напруги 7, який забезпечує формування корегованої (оптимальної) величини напруги onm для блока перетворювача частоти 8. Адаптивна система частотного керування асинхронним двигуном працює наступним чином. У процесі роботи електродвигуна 1 датчики струму 2 та напруги 3 надсилають дані в обчислювальний блок 5, з якого величина відхилення U * надходить на суматор 6. Паралельно, у функціональному блоці 4 відбувається формування напруги за пропорційним f законом регулювання відносно частоти зад , яка подається на суматор 6. Аналізуючи дані сигналів із блоків 2 та 3, обчислювальний блок 5, робота якого базується на залежності (2), проводить визначення величини напруги U * . У початковий момент функціонування системи, за умови відповідності значення напруги оптимальному, на виході 1 UA 68806 U 5 10 обчислювального блока 5 величина U* 0 , тому вона не чинить впливу на процес регулювання. У процесі роботи системи відхилення напруги U * , визначене блоком 5, віднімається в суматорі 6 від поточного значення напруги, сформованого функціональним блоком 4. Отримане оптимальне значення напруги у відносних одиницях надходить на регулятор напруги 7, в якому формується абсолютне значення цієї величини Uonm , яке подається на перетворювач частоти 8. Таким чином досягається підтримання оптимального значення напруги статора електродвигуна 1. Запропонований спосіб адаптивного алгоритму частотного керування асинхронним двигуном, при якому підтримується оптимальна величина прикладеної до статора електродвигуна напруги в залежності від його механічного навантаження, забезпечує енергоефективне керування асинхронним електроприводом технологічних установок. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Спосіб адаптивного частотного керування асинхронним електродвигуном, що забезпечує енергоефективне його регулювання шляхом формування оптимальної величини напруги статора, який відрізняється тим, що ця величина розраховується за відхиленням напруги, яке пропорційне різниці активної і реактивної складових потужності електродвигуна, в залежності від його механічного навантаження. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for adaptive frequency control of asynchronous motor
Автори англійськоюFedoreiko Valerii Stepanovych, Rutylo Mykola Ivanovych, Petrykovych Yurii Yaroslavovych, Lutsyk Iryna Bohdanivna, Iskerskyi Ivan Stanislavovych
Назва патенту російськоюСпособ адаптивного частотного управления асинхронным двигателем
Автори російськоюФедорейко Валерий Степанович, Рутило Николай Иванович, Петрикович Юрий Ярославович, Луцик Ирина Богдановна, Искерский Иван Станиславович
МПК / Мітки
МПК: H02P 1/26
Мітки: двигуном, адаптивного, асинхронним, частотного, спосіб, керування
Код посилання
<a href="https://ua.patents.su/4-68806-sposib-adaptivnogo-chastotnogo-keruvannya-asinkhronnim-dvigunom.html" target="_blank" rel="follow" title="База патентів України">Спосіб адаптивного частотного керування асинхронним двигуном</a>
Спосіб частотного керування асинхронним двигуном
Номер патенту: 2944
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: спосіб, двигуном, керування, частотного, асинхронним
Формула / Реферат:
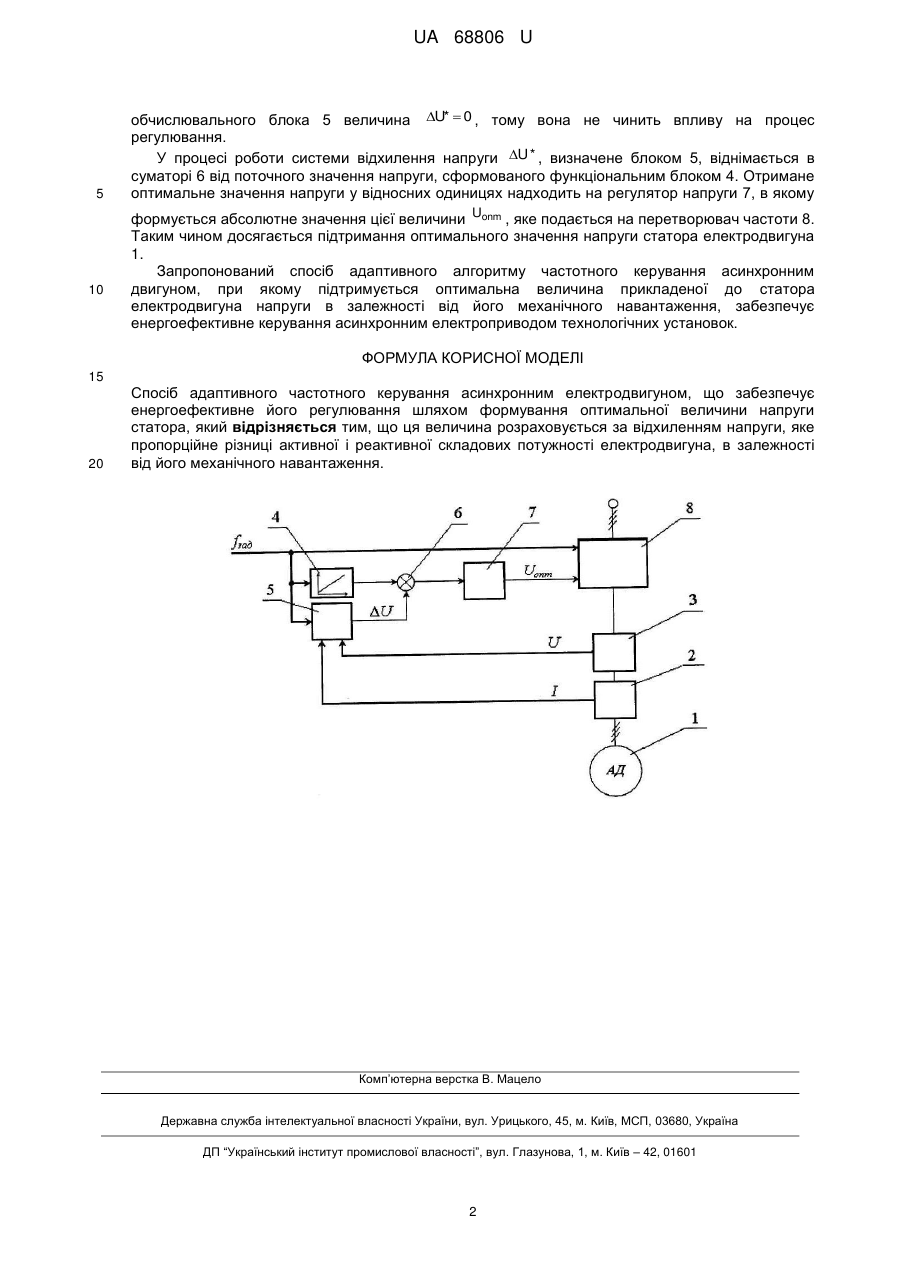
Способ частотного управления асинхронным двигателем, при котором регулируют частоту и величину напряжения питания асинхронного двигателя путем широтно-импульсного модулирования постоянного напряжения питания инвертора, обеспечивая закон регулирования U=Uo+Kf, отличающийся тем, что широтно-импульсное модулирование осуществляют путем дополнительного регулирования длительности импульсов в каждой полуволне напряжения питания по следующему...
Спосіб керування асинхронним двигуном при важкому рушанні та пристрій для його реалізації
Номер патенту: 84176
Опубліковано: 25.09.2008
Автори: Хребтова Оксана Анатоліївна, Романенко Катерина Георгіївна, Конох Ігор Сергійович, Ємець Валерій Васильович, Гладир Андрій Іванович, Гомілко Володимир Іванович
МПК: H02P 1/00
Мітки: пристрій, асинхронним, двигуном, реалізації, спосіб, важкому, рушанні, керування
Формула / Реферат:
1. Спосіб керування асинхронним двигуном при важкому рушанні, що полягає в підключенні асинхронного двигуна до трифазної мережі через перетворювач частоти, формуванні протягом часу t = tT електромагнітного моменту двигуна у функції часу з поступовим збільшенням до значення МП0, що дорівнює пусковому моменту двигуна, контролі процесу запуску впродовж часу t = tB шляхом обчислення ковзання s за миттєвими значеннями струму та напруги статора,...
Спосіб керування асинхронним двигуном та пристрій для його реалізації
Номер патенту: 62097
Опубліковано: 15.12.2003
Автори: Чорний Олексій Петрович, Родькін Дмитро Йосипович, Сичов Сергій Дмитрович
МПК: G01R 31/34
Мітки: асинхронним, двигуном, спосіб, реалізації, керування, пристрій
Формула / Реферат:
1. Спосіб керування асинхронним двигуном, що включає підключення асинхронного двигуна через перетворювач напруги до джерела промислової частоти, вимірювання миттєвих значень напруги та струму статорного ланцюга та розрахунок моменту двигуна, який відрізняється тим, що за даними вимірів розраховують миттєву потужність та момент двигуна, вилучають змінну складову моменту та подають на регулятор системи імпульсно-фазового керування тиристорним...
Пристрій керування асинхронним вентильним двигуном
Номер патенту: 80161
Опубліковано: 27.08.2007
Автори: Епштейн Ісаак Ізраілевич, Кохан Павло Степанович, Хоменко Олександр Андрійович
МПК: H02P 29/00, H02K 29/00
Мітки: керування, вентильним, асинхронним, двигуном, пристрій
Формула / Реферат:
Пристрій керування асинхронним вентильним двигуном, підключений до трифазної живильної мережі, який має трифазний мережний вимикач, перші клеми якого з'єднані з відповідними фазами трифазної живильної мережі, асинхронний вентильний двигун, датчик швидкості обертання ротора, що з'єднаний з ротором асинхронного вентильного двигуна, задатчик швидкості обертання, блок керування, до третього і четвертого входів якого підключені виходи відповідно...
Пристрій керування асинхронним вентильним двигуном
Номер патенту: 10620
Опубліковано: 15.11.2005
Автори: Хоменко Олександр Андрійович, Епштейн Ісаак Ізраілевич, Кохан Павло Степанович
МПК: H02K 29/00
Мітки: двигуном, пристрій, вентильним, асинхронним, керування
Формула / Реферат:
Пристрій керування асинхронним вентильним двигуном, що містить трифазну живильну мережу, трифазний мережний вимикач, перші клеми якого з'єднані з відповідними фазами трифазної живильної мережі, асинхронний вентильний двигун, датчик швидкості обертання ротора, що з'єднаний з ротором асинхронного вентильного двигуна, задатчик швидкості обертання, блок керування, до третього і четвертого входів якого підключені виходи відповідно датчика...
Попередній патент: Пристрій для екстракції рослинної сировини
Наступний патент: Гребінь східця ескалатора
Випадковий патент: Пристрій для розміщення реклами