Віброзанурювач
Номер патенту: 72162
Опубліковано: 17.01.2005
Автори: Павленко Петро Володимирович, Голуб Володимир Павлович, Голенков Геннадій Михайлович, Попков Володимир Сергійович, Богаєнко Микола Володимирович, Чомкалова Ірина Олександрівна
Формула / Реферат
1. Віброзанурювач, що містить раму, гідроциліндр, пружні елементи і наголовник, який відрізняється тим, що між гідроциліндром і наголовником встановлені коаксіально розташовані магнітні системи, принаймні одна з яких виконана електромагнітною, причому одна з них жорстко закріплена на наголовнику і через пружні елементи з'єднана з гідроциліндром, який, в свою чергу, жорстко установлений на рамі, а інша магнітна система закріплена на пружних елементах з можливістю коливання відносно першої.
2. Віброзанурювач за п. 1, який відрізняється тим, що з наголовником жорстко з'єднана зовнішня магнітна система.
3. Віброзанурювач за п. 1, який відрізняється тим, що з наголовником жорстко з'єднана внутрішня магнітна система.
4. Віброзанурювач за пп. 1-3, який відрізняється тим, що гідроциліндр встановлено з можливістю періодичного реверсу створюваного зусилля.
5. Віброзанурювач за пп. 1-4, який відрізняється тим, що обидві магнітні системи виконані електромагнітними.
6. Віброзанурювач за пп. 1-5, який відрізняється тим, що магнітні системи виконані у вигляді коаксіально розташованих циліндрів або мають іншу відому в техніці форму.
7. Віброзанурювач за пп. 1-6, який відрізняється тим, що принаймні одна з магнітних систем виконана зубчатою.
8. Віброзанурювач за пп. 1-7, який відрізняється тим, що кількість зубців в обох магнітних системах, в загальному випадку, є різною.
9. Віброзанурювач за пп. 1-8, який відрізняється тим, що має додаткову навантажувальну масу.
Текст
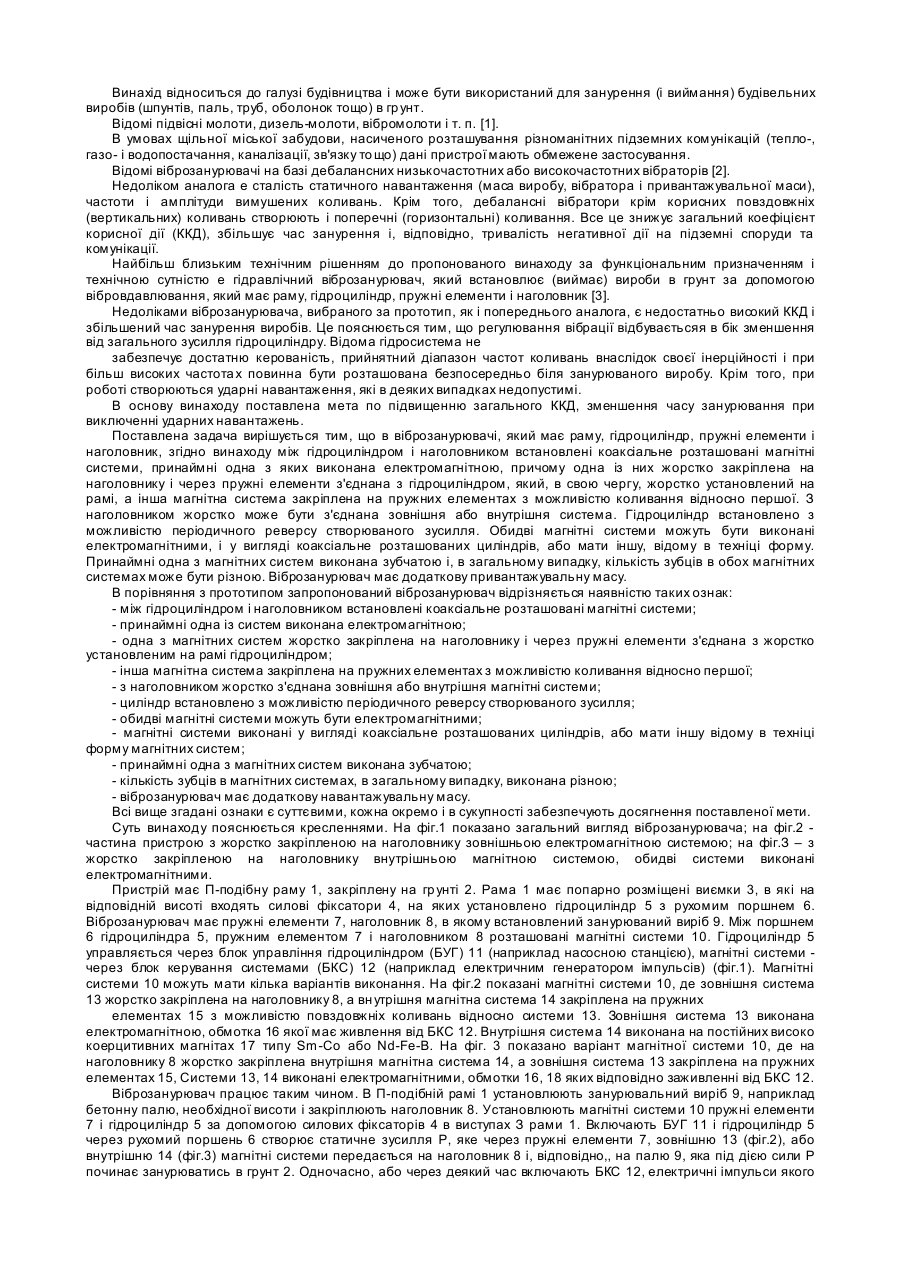
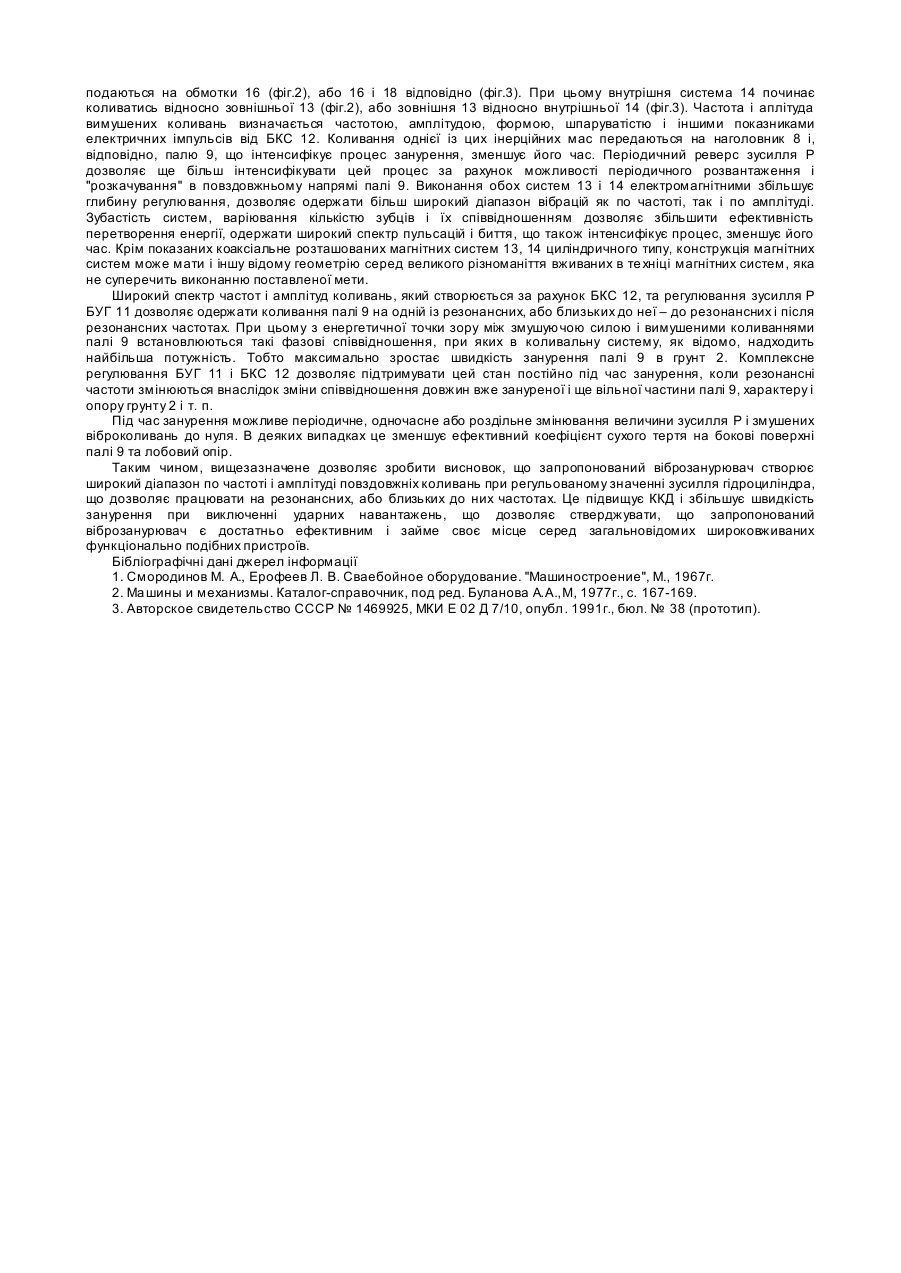
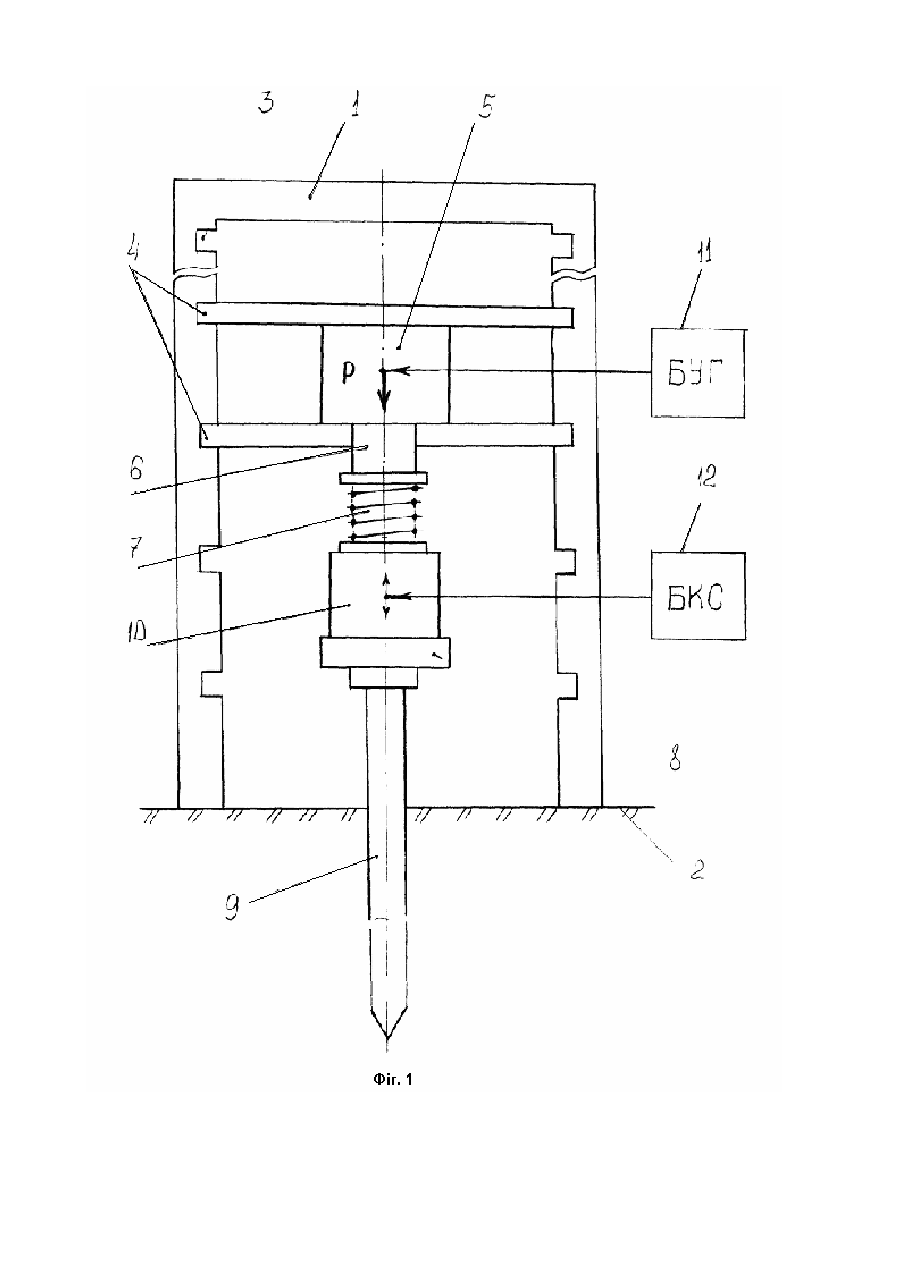
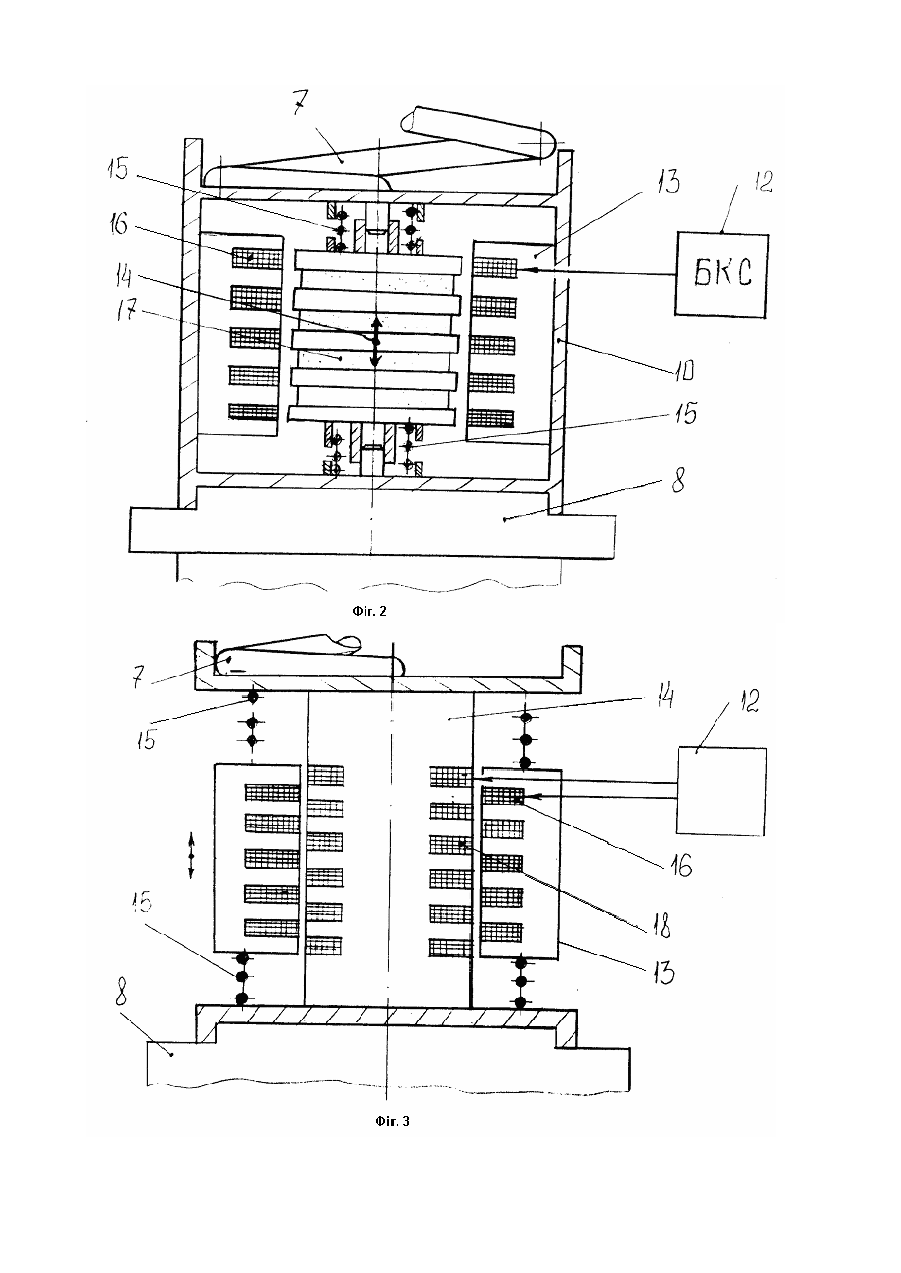
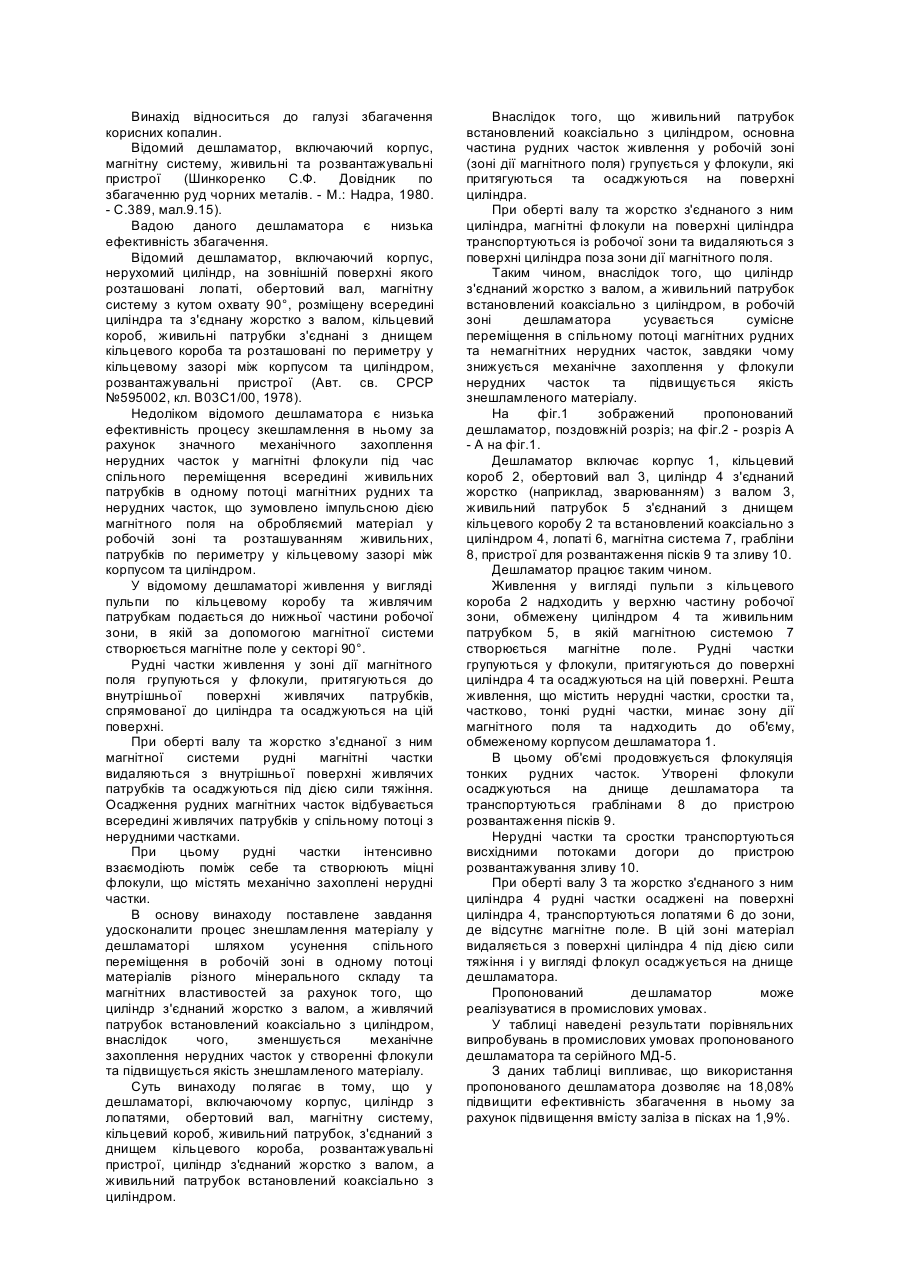
Винахід відноситься до галузі будівництва і може бути використаний для занурення (і виймання) будівельних виробів (шпунтів, паль, труб, оболонок тощо) в гр унт. Відомі підвісні молоти, дизель-молоти, вібромолоти і т. п. [1]. В умовах щільної міської забудови, насиченого розташування різноманітних підземних комунікацій (тепло-, газо- і водопостачання, каналізації, зв'язку то що) дані пристрої мають обмежене застосування. Відомі віброзанурювачі на базі дебалансних низькочастотних або високочастотних вібраторів [2]. Недоліком аналога е сталість статичного навантаження (маса виробу, вібратора і привантажувальної маси), частоти і амплітуди вимушених коливань. Крім того, дебалансні вібратори крім корисних повздовжніх (вертикальних) коливань створюють і поперечні (горизонтальні) коливання. Все це знижує загальний коефіцієнт корисної дії (ККД), збільшує час занурення і, відповідно, тривалість негативної дії на підземні споруди та комунікації. Найбільш близьким технічним рішенням до пропонованого винаходу за функціональним призначенням і технічною сутністю е гідравлічний віброзанурювач, який встановлює (виймає) вироби в грунт за допомогою вібровдавлювання, який має раму, гідроциліндр, пружні елементи і наголовник [3]. Недоліками віброзанурювача, вибраного за прототип, як і попереднього аналога, є недостатньо високий ККД і збільшений час занурення виробів. Це пояснюється тим, що регулювання вібрації відбуваєтьсяя в бік зменшення від загального зусилля гідроциліндру. Відома гідросистема не забезпечує достатню керованість, прийнятний діапазон частот коливань внаслідок своєї інерційності і при більш високих частота х повинна бути розташована безпосередньо біля занурюваного виробу. Крім того, при роботі створюються ударні навантаження, які в деяких випадках недопустимі. В основу винаходу поставлена мета по підвищенню загального ККД, зменшення часу занурювання при виключенні ударних навантажень. Поставлена задача вирішується тим, що в віброзанурювачі, який має раму, гідроциліндр, пружні елементи і наголовник, згідно винаходу між гідроциліндром і наголовником встановлені коаксіальне розташовані магнітні системи, принаймні одна з яких виконана електромагнітною, причому одна із них жорстко закріплена на наголовнику і через пружні елементи з'єднана з гідроциліндром, який, в свою чергу, жорстко установлений на рамі, а інша магнітна система закріплена на пружних елементах з можливістю коливання відносно першої. З наголовником жорстко може бути з'єднана зовнішня або внутрішня система. Гідроциліндр встановлено з можливістю періодичного реверсу створюваного зусилля. Обидві магнітні системи можуть бути виконані електромагнітними, і у вигляді коаксіальне розташованих циліндрів, або мати іншу, відому в техніці форму. Принаймні одна з магнітних систем виконана зубчатою і, в загальному випадку, кількість зубців в обох магнітних системах може бути різною. Віброзанурювач має додаткову привантажувальну масу. В порівняння з прототипом запропонований віброзанурювач відрізняється наявністю таких ознак: - між гідроциліндром і наголовником встановлені коаксіальне розташовані магнітні системи; - принаймні одна із систем виконана електромагнітною; - одна з магнітних систем жорстко закріплена на наголовнику і через пружні елементи з'єднана з жорстко установленим на рамі гідроциліндром; - інша магнітна система закріплена на пружних елементах з можливістю коливання відносно першої; - з наголовником жорстко з'єднана зовнішня або внутрішня магнітні системи; - циліндр встановлено з можливістю періодичного реверсу створюваного зусилля; - обидві магнітні системи можуть бути електромагнітними; - магнітні системи виконані у вигляді коаксіальне розташованих циліндрів, або мати іншу відому в техніці форму магнітних систем; - принаймні одна з магнітних систем виконана зубчатою; - кількість зубців в магнітних системах, в загальному випадку, виконана різною; - віброзанурювач має додаткову навантажувальну масу. Всі вище згадані ознаки є суттєвими, кожна окремо і в сукупності забезпечують досягнення поставленої мети. Суть винаходу пояснюється кресленнями. На фіг.1 показано загальний вигляд віброзанурювача; на фіг.2 частина пристрою з жорстко закріпленою на наголовнику зовнішньою електромагнітною системою; на фіг.З – з жорстко закріпленою на наголовнику внутрішньою магнітною системою, обидві системи виконані електромагнітними. Пристрій має П-подібну раму 1, закріплену на гр унті 2. Рама 1 має попарно розміщені виємки 3, в які на відповідній висоті входять силові фіксатори 4, на яких установлено гідроциліндр 5 з рухомим поршнем 6. Віброзанурювач має пружні елементи 7, наголовник 8, в якому встановлений занурюваний виріб 9. Між поршнем 6 гідроциліндра 5, пружним елементом 7 і наголовником 8 розташовані магнітні системи 10. Гідроциліндр 5 управляється через блок управління гідроциліндром (БУГ) 11 (наприклад насосною станцією), магнітні системи через блок керування системами (БКС) 12 (наприклад електричним генератором імпульсів) (фіг.1). Магнітні системи 10 можуть мати кілька варіантів виконання. На фіг.2 показані магнітні системи 10, де зовнішня система 13 жорстко закріплена на наголовнику 8, а вн утрішня магнітна система 14 закріплена на пружних елементах 15 з можливістю повздовжніх коливань відносно системи 13. Зовнішня система 13 виконана електромагнітною, обмотка 16 якої має живлення від БКС 12. Внутрішня система 14 виконана на постійних високо коерцитивних магнітах 17 типу Sm-Co або Nd-Fe-B. На фіг. 3 показано варіант магнітної системи 10, де на наголовнику 8 жорстко закріплена внутрішня магнітна система 14, а зовнішня система 13 закріплена на пружних елементах 15, Системи 13, 14 виконані електромагнітними, обмотки 16, 18 яких відповідно заживленні від БКС 12. Віброзанурювач працює таким чином. В П-подібній рамі 1 установлюють занурювальний виріб 9, наприклад бетонну палю, необхідної висоти і закріплюють наголовник 8. Установлюють магнітні системи 10 пружні елементи 7 і гідроциліндр 5 за допомогою силових фіксаторів 4 в виступах З рами 1. Включають БУГ 11 і гідроциліндр 5 через рухомий поршень 6 створює статичне зусилля Р, яке через пружні елементи 7, зовнішню 13 (фіг.2), або внутрішню 14 (фіг.3) магнітні системи передається на наголовник 8 і, відповідно,, на палю 9, яка під дією сили Р починає занурюватись в грунт 2. Одночасно, або через деякий час включають БКС 12, електричні імпульси якого подаються на обмотки 16 (фіг.2), або 16 і 18 відповідно (фіг.3). При цьому внутрішня система 14 починає коливатись відносно зовнішньої 13 (фіг.2), або зовнішня 13 відносно внутрішньої 14 (фіг.3). Частота і аплітуда вимушених коливань визначається частотою, амплітудою, формою, шпаруватістю і іншими показниками електричних імпульсів від БКС 12. Коливання однієї із цих інерційних мас передаються на наголовник 8 і, відповідно, палю 9, що інтенсифікує процес занурення, зменшує його час. Періодичний реверс зусилля Р дозволяє ще більш інтенсифікувати цей процес за рахунок можливості періодичного розвантаження і "розкачування" в повздовжньому напрямі палі 9. Виконання обох систем 13 і 14 електромагнітними збільшує глибину регулювання, дозволяє одержати більш широкий діапазон вібрацій як по частоті, так і по амплітуді. Зубастість систем, варіювання кількістю зубців і їх співвідношенням дозволяє збільшити ефективність перетворення енергії, одержати широкий спектр пульсацій і биття, що також інтенсифікує процес, зменшує його час. Крім показаних коаксіальне розташованих магнітних систем 13, 14 циліндричного типу, конструкція магнітних систем може мати і іншу відому геометрію серед великого різноманіття вживаних в те хніці магнітних систем, яка не суперечить виконанню поставленої мети. Широкий спектр частот і амплітуд коливань, який створюється за рахунок БКС 12, та регулювання зусилля Р БУГ 11 дозволяє одержати коливання палі 9 на одній із резонансних, або близьких до неї – до резонансних і після резонансних частотах. При цьому з енергетичної точки зору між змушуючою силою і вимушеними коливаннями палі 9 встановлюються такі фазові співвідношення, при яких в коливальну систему, як відомо, надходить найбільша потужність. Тобто максимально зростає швидкість занурення палі 9 в грунт 2. Комплексне регулювання БУГ 11 і БКС 12 дозволяє підтримувати цей стан постійно під час занурення, коли резонансні частоти змінюються внаслідок зміни співвідношення довжин вже зануреної і ще вільної частини палі 9, характеру і опору грунту 2 і т. п. Під час занурення можливе періодичне, одночасне або роздільне змінювання величини зусилля Р і змушених віброколивань до нуля. В деяких випадках це зменшує ефективний коефіцієнт сухого тертя на бокові поверхні палі 9 та лобовий опір. Таким чином, вищезазначене дозволяє зробити висновок, що запропонований віброзанурювач створює широкий діапазон по частоті і амплітуді повздовжніх коливань при регульованому значенні зусилля гідроциліндра, що дозволяє працювати на резонансних, або близьких до них частотах. Це підвищує ККД і збільшує швидкість занурення при виключенні ударних навантажень, що дозволяє стверджувати, що запропонований віброзанурювач є достатньо ефективним і займе своє місце серед загальновідомих широковживаних функціонально подібних пристроїв. Бібліографічні дані джерел інформації 1. Смородинов М. А., Ерофеев Л. В. Сваебойное оборудование. "Машиностроение", М., 1967г. 2. Ма шины и механизмы. Каталог-справочник, под ред. Буланова А.А.,М, 1977г., с. 167-169. 3. Авторское свидетельство СССР № 1469925, МКИ Е 02 Д 7/10, опубл. 1991г., бюл. № 38 (прототип).
ДивитисяДодаткова інформація
Назва патенту англійськоюVibratory pile driver
Автори англійськоюBohaienko Mykola Volodymyrovych, Holenkov Hennadii Mykhailovych, Holub Volodymyr Pavlovych, Popkov Volodymyr Serhiiovychch, Popkov Volodymyr Serhiiovych
Назва патенту російськоюВибропогружатель
Автори російськоюБогаенко Николай Владимирович, Голенков Геннадий Михайлович, Голуб Владимир Павлович, Попков Владимир Сергеевич
МПК / Мітки
МПК: E02D 7/18, E02D 7/20, E02D 7/10
Мітки: віброзанурювач
Код посилання
<a href="https://ua.patents.su/4-72162-vibrozanuryuvach.html" target="_blank" rel="follow" title="База патентів України">Віброзанурювач</a>
Дешламатор
Номер патенту: 24844
Опубліковано: 06.10.1998
Автор: Нотович Григорій Ісаакович
МПК: B03C 1/00
Мітки: дешламатор
Формула / Реферат:
Дешламатор, включаючий корпус, циліндр з лопатями, обертовий вал, магнітну систему, кільцевий короб, живильний патрубок, з'єднаний з днищем кільцевого короба, розвантажувальні пристрої, який відрізняється тим, що циліндр з'єднаний жорстко з валом, а живильний патрубок встановлений коаксіально з циліндром.
Сепаратор магнітний
Номер патенту: 59769
Опубліковано: 15.09.2003
Автори: Нітяговський Валентин Володимирович, Арсенюк Віталій Михайлович, Шушкевич Олександр Дмитрович
Формула / Реферат:
1. Сепаратор магнітний, який включає лоток подачі продукту, що сепарується, циліндричний обертовий барабан, магнітну систему, призначену для сепарації продукту і виконану з постійних магнітів, розміщених усередині барабана, систему постійних магнітів, встановлених поза барабаном і з’єднаних з лотком подачі продукту системою передачі коливань, який відрізняється тим, що по краях, або торцях циліндричного барабана додатково встановлено магнітну...
Постійний магніт
Номер патенту: 1591
Опубліковано: 15.01.2003
Автори: Бовда Олександр Михайлович, Кравченко Олександр Іванович
МПК: H01F 1/032, H01F 7/02
Формула / Реферат:
Постійний магніт, який містить магнітний елемент із сплаву Nd-Fe-B, який відрізняється тим, що він виконаний складеним так, що до полюсів магнітного елемента із сплаву Nd-Fe-B приєднані магнітні елементи із сплаву Sm-Co.
Магнітний сепаратор
Номер патенту: 4064
Опубліковано: 15.12.2004
Автори: Сущенков Юрій Єгорович, Погорелов Сергій Степановіч, Чугунов Юрій Давидович, Рижов Володимир Леонидович
Формула / Реферат:
1. Магнітний сепаратор, що містить робочий орган, виконаний у вигляді стрічкового транспортера на роликових опорах з натяжним і привідним барабанами, усередині якого розташована магнітна система з плоских постійних магнітів, встановлених уздовж напрямку вільнопадаючого потоку металургійного шлаку, і приймачі магнітних і немагнітних продуктів, який відрізняється тим, що він оснащений витяжним вентилятором і відсікачем, магнітна система і зона...
Спосіб вилучення магнітних частинок з рідких, газоподібних і сипучих середовищ та пристрій для його здійснення
Номер патенту: 64019
Опубліковано: 16.02.2004
Автори: Лозін Дмитро Андрійович, Нітяговський Валентин Володимирович, Арсенюк Віталій Михайлович, Зигалов Володимир Васильович, Жолобницький Ігор Олександрович, Лозін Андрій Афонійович
Мітки: середовищ, частинок, сипучих, магнітних, здійснення, вилучення, газоподібних, спосіб, рідких, пристрій
Формула / Реферат:
1. Спосіб вилучення магнітних частинок з рідких, газоподібних і сипучих середовищ з використанням осаджуючих елементів шляхом впливу на середовище неоднорідного магнітного поля з боку магнітної системи, розташованої всередині осаджуючих елементів при обтіканні їх середовищем, що очищається, який відрізняється тим, що потік середовища формують з урахуванням топології магнітного поля.2. Спосіб вилучення магнітних частинок з рідких,...
Попередній патент: Спосіб занурення будівельних виробів в ґрунт
Наступний патент: Віброзанурювальний пристрій
Випадковий патент: Спосіб і пристрій для вироблення електроенергії у газо- і паротурбінній електростанції