Спосіб занурення будівельних виробів в ґрунт
Номер патенту: 72161
Опубліковано: 17.01.2005
Автори: Чомкалова Ірина Олександрівна, Павленко Петро Володимирович, Богаєнко Микола Володимирович, Голенков Геннадій Михайлович, Голуб Володимир Павлович, Попков Володимир Сергійович
Формула / Реферат
1. Спосіб занурення будівельних виробів в ґрунт, при якому на вироби діють силовим статичним навантаженням і вимушеними віброколиваннями, який відрізняється тим, що регулюють величину силового статичного зусилля, а також амплітуду і частоту вимушених віброколивань до досягнення частоти коливання, рівної або близької до однієї з власних частот коливань виробу в системі "виріб - ґрунт".
2. Спосіб за п. 1, який відрізняється тим, що регулювання виконують постійно під час занурення виробу в залежності від зміни параметрів коливальної системи "виріб - ґрунт" з врахуванням швидкості дисипації енергії в системі.
3. Спосіб за пп. 1, 2, який відрізняється тим, що періодично, одночасно або роздільно змінюють величину силового статичного зусилля і вимушених віброколивань до нуля.
4. Спосіб за пп. 1-3, який відрізняється тим, що періодично здійснюють реверс силового статичного зусилля.
5. Спосіб за пп. 1-4, який відрізняється тим, що для занурення створюють тільки повздовжні віброколивання виробу.
Текст
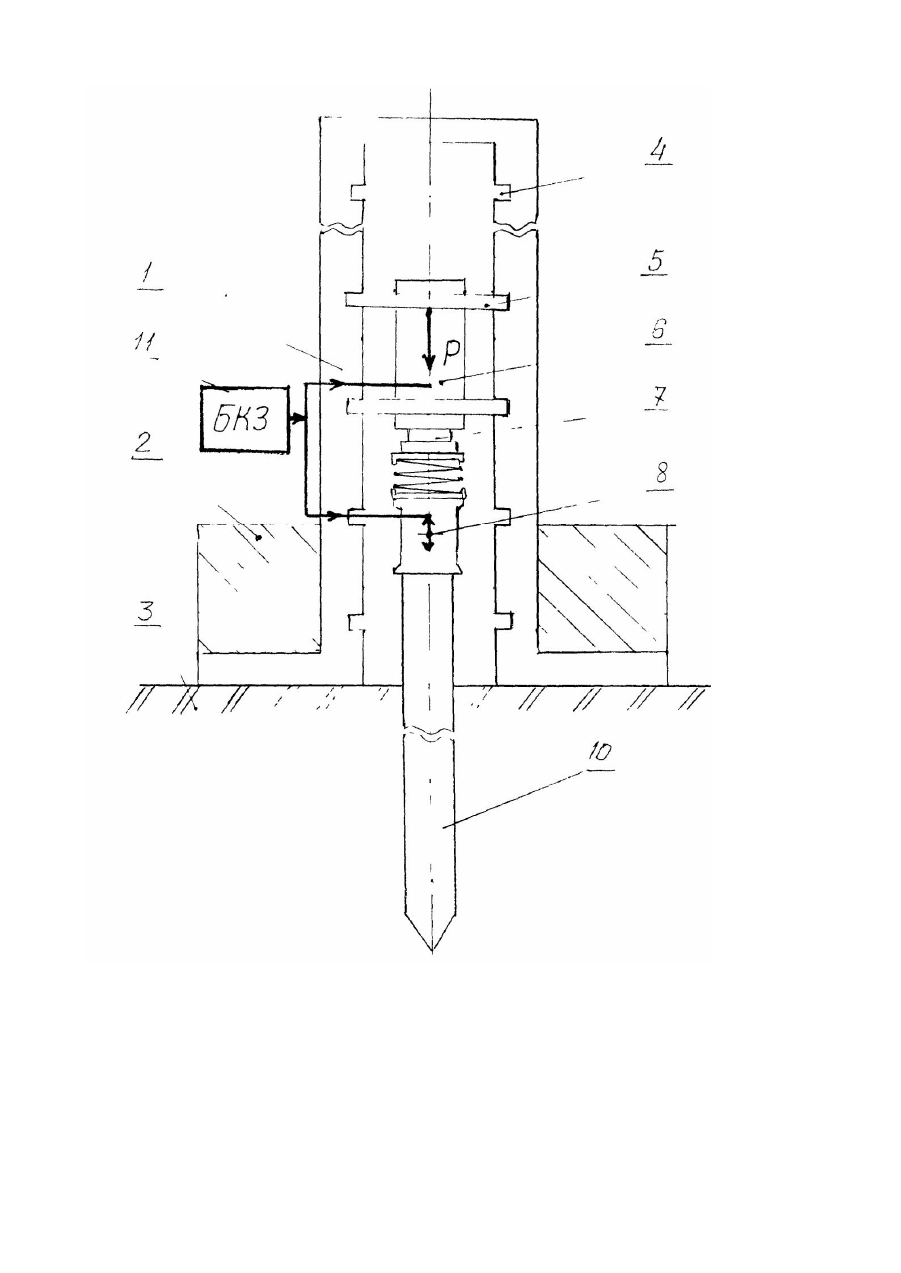
Винахід відноситься до галузі будівництва і може бути використаний для занурення будівельних виробів (шпунтів, паль, труб, оболонок тощо) в грун т, або виймання його з грунту. Відомий спосіб занурення будівельних виробів в гр унт забиванням за допомогою підвісних молотів, дизельмолотів, вібромолотів і т.п. [1]. Даний спосіб має обмежене застосування в умовах щільної міської забудови, насиченого розташування різноманітних підземних комунікацій (тепло-, газо-, електро- і водопостачання, каналізації, зв’язку тощо), а також не зовсім екологічно безпечний. Відомий спосіб занурення та виймання будівельних виробів в грунт за допомогою вібрації. [2]. Недоліком аналога є сталість статичного навантаження (маси виробу, вібратора і інколи привантажувальної маси), незмінність частоти і амплітуди вимушених коливань, що не дозволяє враховувати частоту власних коливань виробу в системі "виріб - грунт", її залежності від характеристик грунту і самого виробу, а також постійної зміни параметрів системи в залежності від глибини занурення виробу в грунт. Такий, в основному довільний, вибір статичного навантаження, частоти і амплітуди коливань не дозволяє достатньо ефективно використовувати спосіб, що збільшує час занурення, знижує коефіцієнт корисної дії (ККД), збільшує тривалість негативної дії на підземні комунікації і споруди. Крім того, застосовані дебалансні вібратори створюють крім корисних повздовжніх (вертикальних) коливань і поперечні (горизонтальні) коливання, які також знижують ККД за рахунок додаткових витрат енергії і негативно діють на підземні комунікації і споруди. Найбільш близьким технічним рішенням до пропонованого винаходу за призначенням і технічною сутністю є спосіб занурення будівельних виробів в грунт за допомогою вібровдавлювання, при якому на вироби діють силовим статичним навантаженням і вимушеними віброколиваннями. [3]. Недоліками способу, вибраного за прототип, як і попереднього аналога є недостатня ефективність перетворення енергії внаслідок нерегульованості силового статичного навантаження, частоти і амплітуди вимушених коливань, неврахування параметрів коливальної системи "виріб - грунт", а також застосування дебалансних вібраторів з складною формою віброколивань, що зменшує ефективність процесу за рахунок зниження загального ККД, збільшення часу занурення виробу, тривалості негативної дії на підземні комунікації і споруди. В основу винаходу покладена мета по підвищенню ефективності та інтенсифікації процесу занурення будівельних виробів в грунт шляхом керованості і проведення його на резонансних частотах, або близьких до них - дорезонансних і після резонансних частотах - з урахуванням дисипативності коливальної системи "виріб - грунт" і змінності під час роботи її параметрів. Поставлена задача вирішується тим, що згідно способу занурення будівельних виробів в грунт, при якому на вироби діють силовим статичним навантаженням і вимушеними віброколиваннями, згідно винаходу регулюють величину силового статичного зусилля, а також амплітуду і частоту вимушених віброколивань до досягнення частоти коливання виробу, рівної, або близької до однієї з власних частот коливань виробу в системі "виріб грунт". Враховуючи те, що під час занурення виробу в грунт параметри коливальної системи "виріб - грунт" і дисипація енергії змінюються, запропоноване регулювання виконують постійно під час всього занурення в залежності від зміни згаданих параметрів і швидкості дисипації енергії в системі. Постійність керування не заперечує деяку періодичність (дискретність) цього процесу при невеликій швидкості зміни параметрів і дисипації енергії. В запропонованому способі періодично, одночасно або роздільно змінюють величину силового статичного зусилля і вимушених віброколивань системи до нуля. В запропонованому рішенні періодично здійснюють реверс силового статичного зусилля. В способі занурення створюють тільки повздовжні (в загальному випадку вертикальні) віброколивання виробу. В порівнянні з прототипом запропонований спосіб відрізняється наявністю таких ознак: - регулюють силове статичне зусилля, а також амплітуду і частоту вимушених віброколивань; - регулювання здійснюють до досягнення частоти коливання виробу рівної, або близької до однієї з власних частот коливань виробу в системі "виріб - гр унт"; - виконують постійне регулювання під час всього процесу занурення виробу в гр унт в залежності від: - зміни параметрів коливальної системи "виріб - грунт", - швидкості дисипації енергії в системі; - змінюють періодично, одночасно або роздільно величину силового статичного зусилля і вимушених віброколивань до нуля; - періодично здійснюють реверс силового статичного зусилля; - створюють тільки повздовжні коливання занурюваного виробу. Всі вищеназвані ознаки є суттєвими, кожна окремо і в сук упності забезпечують досягнення поставленої мети. Суть винаходу пояснюється кресленням. На фігурі приведена функціональна схема одного з варіантів пристрою для реалізації запропонованого способу. Пристрій має П-подібну раму 1 з навантажувальними масами 2, наприклад бетонними блоками, установлену на грунті 3. Рама 1 має розміщені виїмки 4, в які на відповідній висоті входять силові фіксатори 5, на яких установлений гідроциліндр 6 з рухомим поршнем 7. Замість гідроциліндру 6 може використовуватись і інший функціональноподібний вузол - пневмоциліндр, гвинтовий домкрат і т.п. Між рухомим поршнем 7 і електромагнітним віброзбуджувачем 8 повздовжніх коливань розташована пружна розв’язка 9. Віброзбуджувач 8 установлений на занурюваному виробі 10, наприклад бетонній палі. Керування гідроциліндром 6 і віброзбуджувачем 8 виконується за допомогою блока керування зануренням (БКЗ) 11. БКЗ має зворотні зв"язки від датчиків (на фіг. умовно не показані), установлених на пристрої - наприклад, на гідроцилінрі б, віброзбуджувачі 8, палі 10, - які видають сигнали про величини силового статичного зусилля, частоти і амплітуди коливань палі тощо. Пристрій працює таким чином. В П-подібній рамі 1 установлюють палю 10 необхідної висоти. На ній установлюють віброзбуджувач 8, пружну розв'язку 9 і гідроциліндр 6, який за допомогою силових фіксаторів 5 закріплюють на відповідній висоті у виїмках 4 рами 1. Включають гідроциліндр 6, який за допомогою рухомого поршня 7 створює силове статичне повздовжнє зусилля Р , яке через пружну розв'язку 9 і корпус віброзбуджувача 8 передається на палю 10. При включенні віброзбуджувача 8 на палю 10 передаються і вимушені віброколивання, частота і амплітуда яких визначається частотою, амплітудою, формою, шпаруватістю та іншими показниками електричних імпульсів, які живлять електромагнітний віброзбуджувач 8. Таким чином, навантажена статичним зусиллям Р паля 10 отримує повздовжні коливання і починає занурюватись в грунт 3. БКЗ 11, комплексно регулюючи вищезгадані параметри, встановлює оптимальне їх співвідношення - доводить частоту коливання палі 10 до рівної, або близької до неї однієї з власних частот коливань, тобто до однієї з резонансних, або близької до неї частоти. При цьому з енергетичної точки зору між змушуючою силою і вимушеними коливаннями палі 10 встановлюються такі фазові співвідношення, при яких, як відомо, в коливальну систему надходить найбільша потужність. Значення максимальної амплітуди коливань при резонансній і близьких до неї частотах залежить від швидкості дисипації енергії в коливальній системі. Завдяки вищезазначеному, максимально зростає швидкість занурення палі 10 в грун т 3, зменшується час негативного впливу на підземні споруди і комунікації, зменшуються витрати енергії, зростає ККД, інтенсифікація та ефективність процесу занурення, забезпечується виконання поставленої мети. Під час занурення параметри коливальної системи і дисипація енергії в системі змінюються, передусім за рахунок зміни співвідношення довжин вже зануреної і ще вільної частин палі 10, характеру і опору грунту 3 і т.п., що викликає зміну резонансних частот. Враховуючи зазначене, для підтримки стану резонансних, або біля резонансних коливань занурюваної палі 10 БКЗ 11 виконує постійне регулювання величини силового статичного зусилля Р гідроциліндра 6, частоти і амплітуди коливань віброзбуджувача 8, тобто підтримує їх оптимальне співвідношення на даний момент. Під час занурення можливе періодичне, одночасне або роздільне змінювання величини силового статичного зусилля і змушених віброколивань до нуля. В деяких випадках це зменшує ефективний коефіцієнт сухого тертя на боковій поверхні палі 10 та лобовий опір. Інтенсифікує процес і періодичний реверс статичного зусилля Р, що дозволяє "розвантажувати і розкачувати" палю 9 в повздовжньому напрямку. Для підвищення ефективності запропонованого способу занурення створюють тільки повздовжні віброколивання палі 10, що також дозволяє зменшити додаткові витрати енергії і негативний вплив на підземні комунікації та споруди. Для виймання виробів з грунту, як і в відомих способах, змінюють напрям діючої сили в комплексі з віброколиваннями. Запропонований спосіб є достатньо ефективним і може бути успішно застосованим у будівництві для занурення (і вийняття) в грунт будівельних виробів - шпунтів, паль, труб, оболонок і т.п. Позитивний ефект від застосування даного способу полягає в інтенсифікації процесу занурення, підвищенні ККД, зменшенні витрат енергії і негативного впливу на розташовані поблизу підземні комунікації та споруди, що забезпечує ефективність даних будівельних робіт в цілому. Це дозволяє зробити висновок, що він займе своє місце серед загальновідомих, широковживаних функціонально подібних технологій. Бібліографічні дані джерел інформації 1. Смородинов М.А., Еро феев Л.В. Сваебойное оборудование. «Машиностроение», М., 1967г. 2. Ма шины и механизмы. Каталог-справочник, под ред. Буланова А.А., М., 1977г., с.167-169. 3. Грутман М.С. Свайные фундаменты. «Будівельник», Киев, 1969г., с.2б. (прототип).
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for driving building structures into soil
Автори англійськоюBohaienko Mykola Volodymyrovych, Holenkov Hennadii Mykhailovych, Holub Volodymyr Pavlovych, Popkov Volodymyr Serhiiovych, Popkov Volodymyr Serhiiovychch
Назва патенту російськоюСпособ погружения строительных изделий в грунт
Автори російськоюБогаенко Николай Владимирович, Голенков Геннадий Михайлович, Голуб Владимир Павлович, Попков Владимир Сергеевич
МПК / Мітки
МПК: E02D 7/26, E02D 7/18, E02D 7/20
Мітки: ґрунт, спосіб, виробів, будівельних, занурення
Код посилання
<a href="https://ua.patents.su/3-72161-sposib-zanurennya-budivelnikh-virobiv-v-runt.html" target="_blank" rel="follow" title="База патентів України">Спосіб занурення будівельних виробів в ґрунт</a>
Спосіб одержання будівельних виробів з піноматеріалу
Номер патенту: 37479
Опубліковано: 15.05.2001
Автор: Томський Юрій Вікторович
МПК: C04B 38/00, C04B 5/00
Мітки: виробів, будівельних, спосіб, одержання, піноматеріалу
Формула / Реферат:
Спосіб одержання будівельних виробів з піноматеріалу, що включає здрібнювання шихти, яка містить кальциновану соду, оксиди металів і домішки, перемішування її, нагрівання, спінювання та відпалення виробів, який відрізняється тим, що при перемішуванні в шихту вводять здрібнений глинозем, нагрівання здійснюють до розплавлення композиції, спінювання здійснюють при температурі розплавлення шляхом барботування розплаву нагрітим повітрям з...
Спосіб виготовлення будівельних виробів
Номер патенту: 55596
Опубліковано: 15.04.2003
Автори: Григоренко Анатолій Григорович, Ткаченко Володимир Андрійович, Федоренко Сергій Володимирович, Гребенников Валерій Миколайович
МПК: C03B 19/00
Мітки: виготовлення, виробів, спосіб, будівельних
Формула / Реферат:
Спосіб виготовлення будівельних виробів із пористого матеріалу, який включає завантаження шихти у формоутворюючий елемент, нагрівання, спінювання та спікання шихти з матеріалом формоутворюючого елемента, який відрізняється тим, що завантаження шихти здійснюють у формоутворюючий елемент, який виконано у вигляді принаймні одномісної форми визначеної конфігурації з тугоплавкого матеріалу, нагрівають формоутворюючий елемента з шихтою до...
Спосіб виготовлення будівельних виробів
Номер патенту: 53312
Опубліковано: 15.01.2003
Автор: Момотов Юрій Леонідович
МПК: C04B 28/08, C04B 18/14
Мітки: виробів, виготовлення, будівельних, спосіб
Формула / Реферат:
1. Спосіб виготовлення будівельних виробів, що включає змішування заповнювача і сполучного компонента, формування і термічну обробку, який відрізняється тим, що при змішуванні як заповнювач використовують гранульований шлак, а як сполучний компонент - гранульований шлак молотий у наступних пропорціях, %: гранульований шлак 55-85 гранульований шлак молотий 10-15. 2....
Спосіб виготовлення будівельних виробів
Номер патенту: 53346
Опубліковано: 15.01.2003
Автор: Момотов Юрій Леонідович
МПК: C04B 40/00, C04B 28/04, C04B 14/28
Мітки: виробів, виготовлення, спосіб, будівельних
Формула / Реферат:
1. Спосіб виготовлення будівельних виробів, що включає змішування заповнювача і сполучного компонента, формування і термічну обробку, який відрізняється тим, що при змішуванні заповнювача і сполучного компонента як сполучний компонент використовують портландцемент, як заповнювач використовують пісок з вапняку черепашнику при наступному співвідношенні компонентів, %: портландцемент 10-20 пісок з...
Форма для виготовлення будівельних виробів із скопобетону
Номер патенту: 1276
Опубліковано: 17.06.2002
Автор: Савченко Віктор Володимирович
МПК: B28B 7/00
Мітки: форма, виготовлення, скопобетону, будівельних, виробів
Формула / Реферат:
1. Форма для виготовлення будівельних виробів із скопобетону, що містить бортові стінки, піддон та стержні для утворення порожнин, яка відрізняється тим, що бортові стінки мають обмежувачі і являють собою каркас коробчастого вигляду із висувним дном та кришкою-пуансоном із стержнями для утворення порожнин, який встановлений на піддоні, при цьому бортові стінки, кришка-пуансон та висувне дно виконані перфорованими.2. Форма за п. 1, яка...
Попередній патент: Дентальний імплантат
Наступний патент: Віброзанурювач
Випадковий патент: Спосіб омолодження організму