Привід точних лінійних переміщень для механізму паралельної кінематики
Номер патенту: 73308
Опубліковано: 25.09.2012
Автори: Струтинський Сергій Васильович, Юрчишин Оксана Ярославівна
Формула / Реферат
Привід точних лінійних переміщень для механізму паралельної кінематики, який складається із двигуна, зубчастої передачі та гвинтової передачі, розміщеної в порожнистій штанзі з гайкою із можливістю переміщення штанги відносно трубчастого корпусу штанги, який відрізняється тим, що в трубчастій штанзі встановлені дискретні пневмо- або гідроприводи швидких переміщень, при цьому двигун встановлено на нерухомій основі, а зубчаста передача виконана у вигляді беззазорного безлюфтового хвильового редуктора, вхід якого підключено до вала двигуна, а вихід зв'язано з обертовим корпусом сферичної опори штанги, при цьому всі ланки кінематичного ланцюга мають пристрої для вибірки люфтів та попереднього натягу контактів деталей в рухомих з'єднаннях.
Текст
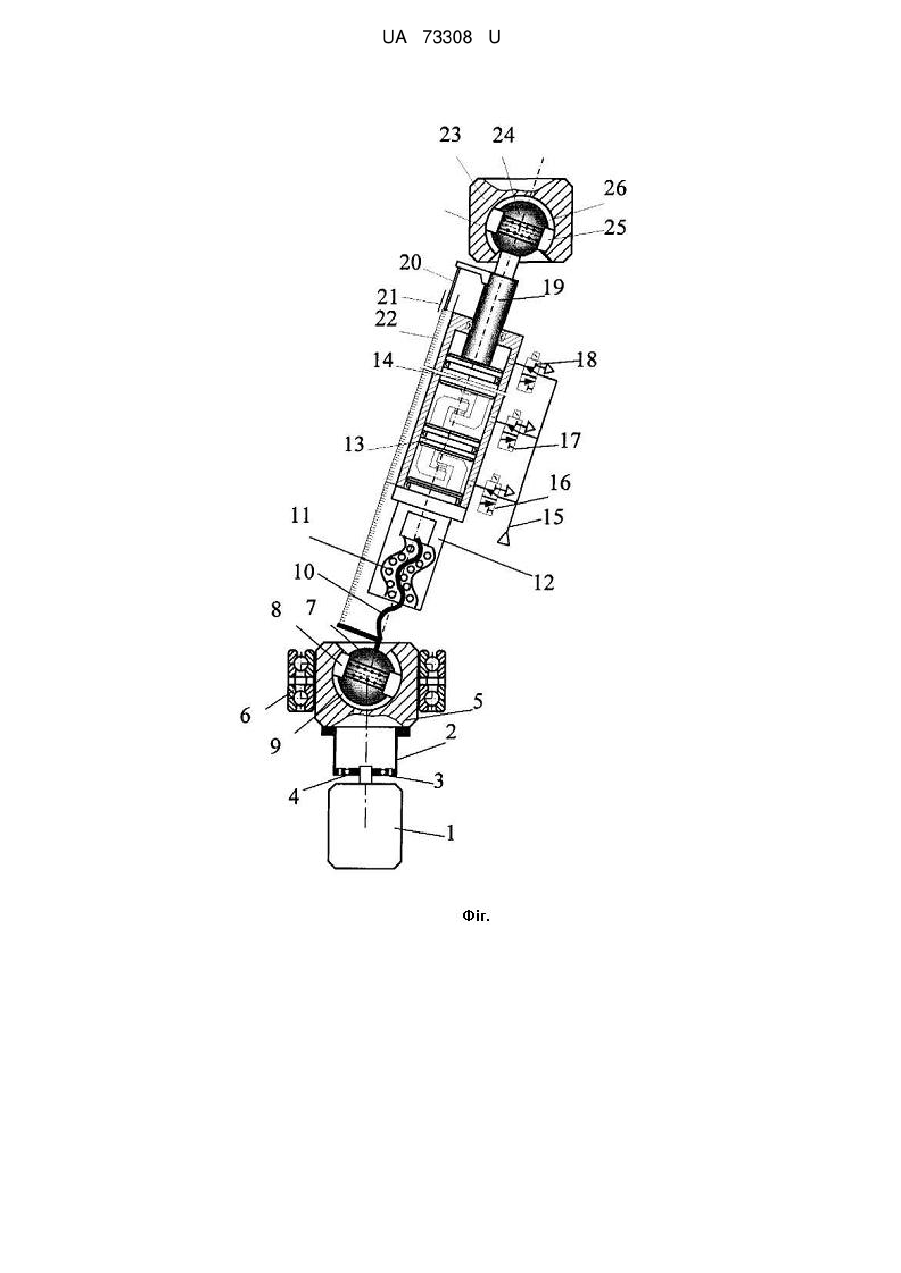
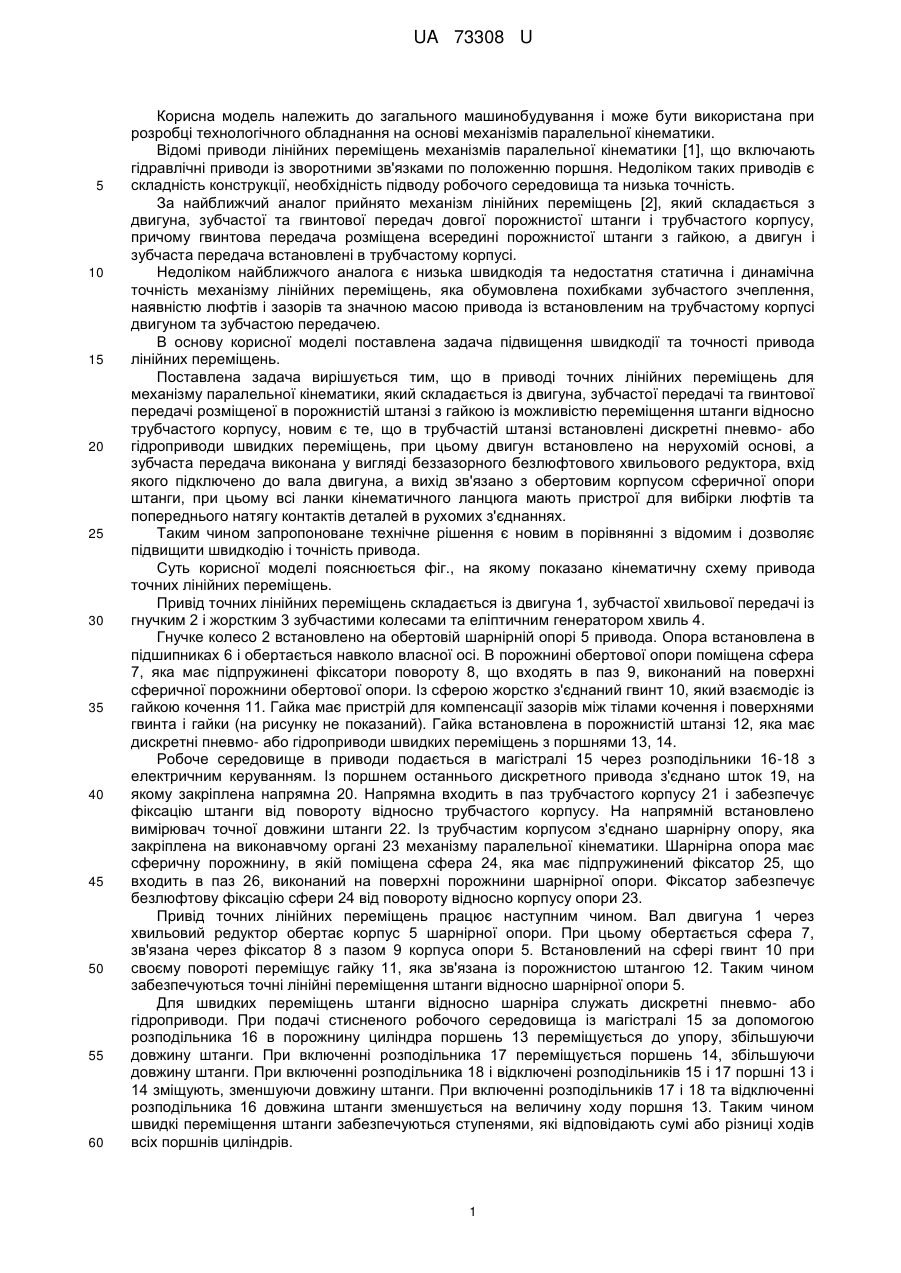
Реферат: UA 73308 U UA 73308 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до загального машинобудування і може бути використана при розробці технологічного обладнання на основі механізмів паралельної кінематики. Відомі приводи лінійних переміщень механізмів паралельної кінематики [1], що включають гідравлічні приводи із зворотними зв'язками по положенню поршня. Недоліком таких приводів є складність конструкції, необхідність підводу робочого середовища та низька точність. За найближчий аналог прийнято механізм лінійних переміщень [2], який складається з двигуна, зубчастої та гвинтової передач довгої порожнистої штанги і трубчастого корпусу, причому гвинтова передача розміщена всередині порожнистої штанги з гайкою, а двигун i зубчаста передача встановлені в трубчастому корпусі. Недоліком найближчого аналога є низька швидкодія та недостатня статична і динамічна точність механізму лінійних переміщень, яка обумовлена похибками зубчастого зчеплення, наявністю люфтів і зазорів та значною масою привода із встановленим на трубчастому корпусі двигуном та зубчастою передачею. В основу корисної моделі поставлена задача підвищення швидкодії та точності привода лінійних переміщень. Поставлена задача вирішується тим, що в приводі точних лінійних переміщень для механізму паралельної кінематики, який складається із двигуна, зубчастої передачі та гвинтової передачі розміщеної в порожнистій штанзі з гайкою із можливістю переміщення штанги відносно трубчастого корпусу, новим є те, що в трубчастій штанзі встановлені дискретні пневмо- або гідроприводи швидких переміщень, при цьому двигун встановлено на нерухомій основі, а зубчаста передача виконана у вигляді беззазорного безлюфтового хвильового редуктора, вхід якого підключено до вала двигуна, а вихід зв'язано з обертовим корпусом сферичної опори штанги, при цьому всі ланки кінематичного ланцюга мають пристрої для вибірки люфтів та попереднього натягу контактів деталей в рухомих з'єднаннях. Таким чином запропоноване технічне рішення є новим в порівнянні з відомим і дозволяє підвищити швидкодію і точність привода. Суть корисної моделі пояснюється фіг., на якому показано кінематичну схему привода точних лінійних переміщень. Привід точних лінійних переміщень складається із двигуна 1, зубчастої хвильової передачі із гнучким 2 і жорстким 3 зубчастими колесами та еліптичним генератором хвиль 4. Гнучке колесо 2 встановлено на обертовій шарнірній опорі 5 привода. Опора встановлена в підшипниках 6 і обертається навколо власної осі. В порожнині обертової опори поміщена сфера 7, яка має підпружинені фіксатори повороту 8, що входять в паз 9, виконаний на поверхні сферичної порожнини обертової опори. Із сферою жорстко з'єднаний гвинт 10, який взаємодіє із гайкою кочення 11. Гайка має пристрій для компенсації зазорів між тілами кочення і поверхнями гвинта і гайки (на рисунку не показаний). Гайка встановлена в порожнистій штанзі 12, яка має дискретні пневмо- або гідроприводи швидких переміщень з поршнями 13, 14. Робоче середовище в приводи подається в магістралі 15 через розподільники 16-18 з електричним керуванням. Із поршнем останнього дискретного привода з'єднано шток 19, на якому закріплена напрямна 20. Напрямна входить в паз трубчастого корпусу 21 і забезпечує фіксацію штанги від повороту відносно трубчастого корпусу. На напрямній встановлено вимірювач точної довжини штанги 22. Із трубчастим корпусом з'єднано шарнірну опору, яка закріплена на виконавчому органі 23 механізму паралельної кінематики. Шарнірна опора має сферичну порожнину, в якій поміщена сфера 24, яка має підпружинений фіксатор 25, що входить в паз 26, виконаний на поверхні порожнини шарнірної опори. Фіксатор забезпечує безлюфтову фіксацію сфери 24 від повороту відносно корпусу опори 23. Привід точних лінійних переміщень працює наступним чином. Вал двигуна 1 через хвильовий редуктор обертає корпус 5 шарнірної опори. При цьому обертається сфера 7, зв'язана через фіксатор 8 з пазом 9 корпуса опори 5. Встановлений на сфері гвинт 10 при своєму повороті переміщує гайку 11, яка зв'язана із порожнистою штангою 12. Таким чином забезпечуються точні лінійні переміщення штанги відносно шарнірної опори 5. Для швидких переміщень штанги відносно шарніра служать дискретні пневмо- або гідроприводи. При подачі стисненого робочого середовища із магістралі 15 за допомогою розподільника 16 в порожнину циліндра поршень 13 переміщується до упору, збільшуючи довжину штанги. При включенні розподільника 17 переміщується поршень 14, збільшуючи довжину штанги. При включенні розподільника 18 і відключені розподільників 15 і 17 поршні 13 і 14 зміщують, зменшуючи довжину штанги. При включенні розподільників 17 і 18 та відключенні розподільника 16 довжина штанги зменшується на величину ходу поршня 13. Таким чином швидкі переміщення штанги забезпечуються ступенями, які відповідають сумі або різниці ходів всіх поршнів циліндрів. 1 UA 73308 U 5 Об'єднання швидких і точних переміщень забезпечує необхідну швидкодію та точність привода. Для визначення точної довжини штанги (відстані між сферами 7 і 24) служить вимірювач 22. Джерела інформації: 1. Кузнецов Ю.Н., Дмитриев Д.О., Диневич Г.Ю. Компоновки станков с механизмами параллельной структуры - Херсон: ПП Вишемирський В.С, 2009.-456 с. 2. Механізм лінійних переміщень. Патент України № 44754. МПК F16H25/22 / Павленко І.І., Валявський І.А., Валявський А.І. Заявл. 22.05.2009. - № u200905087. Опубл. 12.10.2009, Бюл. № 19. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Привід точних лінійних переміщень для механізму паралельної кінематики, який складається із двигуна, зубчастої передачі та гвинтової передачі, розміщеної в порожнистій штанзі з гайкою із можливістю переміщення штанги відносно трубчастого корпусу штанги, який відрізняється тим, що в трубчастій штанзі встановлені дискретні пневмо- або гідроприводи швидких переміщень, при цьому двигун встановлено на нерухомій основі, а зубчаста передача виконана у вигляді беззазорного безлюфтового хвильового редуктора, вхід якого підключено до вала двигуна, а вихід зв'язано з обертовим корпусом сферичної опори штанги, при цьому всі ланки кінематичного ланцюга мають пристрої для вибірки люфтів та попереднього натягу контактів деталей в рухомих з'єднаннях. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of accurate linear displacements for the mechanism of parallel kinematics
Автори англійськоюStrutynskyi Serhii Vasyliovych, Yurchyshyn Oksana Yaroslavivna
Назва патенту російськоюПривод точных линейных перемещений для механизма параллельной кинематики
Автори російськоюСтрутинский Сергей Васильевич, Юрчишин Оксана Ярославовна
МПК / Мітки
МПК: F16H 25/22
Мітки: привід, механізму, переміщень, паралельно, кінематики, точних, лінійних
Код посилання
<a href="https://ua.patents.su/4-73308-privid-tochnikh-linijjnikh-peremishhen-dlya-mekhanizmu-paralelno-kinematiki.html" target="_blank" rel="follow" title="База патентів України">Привід точних лінійних переміщень для механізму паралельної кінематики</a>
Механізм лінійних переміщень
Номер патенту: 44754
Опубліковано: 12.10.2009
Автори: Валявський Іван Анатолійович, Павленко Іван Іванович, Валявський Анатолій Іванович
МПК: F16H 25/22
Мітки: лінійних, механізм, переміщень
Формула / Реферат:
Механізм лінійних переміщень, який складається з двигуна, зубчастої та гвинтової передач, довгої порожнистої штанги і трубчастого корпусу, який відрізняється тим, що гвинтова передача розміщена всередині порожнистої штанги з гайкою з можливістю її лінійного переміщення відносно трубчастого корпусу.
Механізм лінійних переміщень
Номер патенту: 48333
Опубліковано: 10.03.2010
Автори: Валявський Анатолій Іванович, Павленко Іван Іванович, Валявський Іван Анатолійович
МПК: F16C 13/00
Мітки: лінійних, переміщень, механізм
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої та гвинтової передач, порожнистої рухомої штанги та трубчастого корпусу, який відрізняється тим, що між корпусом зубчастої передачі та гвинтом встановлений упорний підшипник.
Механізм лінійних переміщень
Номер патенту: 63440
Опубліковано: 10.10.2011
Автори: Павленко Іван Іванович, Валявський Іван Анатолійович, Вахніченко Дмитро Володимирович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: механізм, переміщень, лінійних
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої передачі та гвинтової передачі з лівою та правою різьбами на кінцях, двох порожнистих штанг з гайками і двох трубчастих корпусів, який відрізняється тим, що обертання гвинта з лівою та правою різьбами на кінцях примушує дві порожнисті штанги з відповідними гайками переміщуватися у протилежних напрямках, змінюючи загальну довжину кінематичної ланки.
Механізм лінійних переміщень
Номер патенту: 63423
Опубліковано: 10.10.2011
Автори: Валявський Іван Анатолійович, Валявський Анатолій Іванович, Павленко Іван Іванович, Вахніченко Дмитро Володимирович
МПК: F16H 25/22
Мітки: лінійних, механізм, переміщень
Формула / Реферат:
Механізм лінійних переміщень, що складається з корпуса, двох штанг, рейкового колеса, зубчастої конічної передачі, електродвигуна, який відрізняється тим, що, при обертанні рейкового колеса, дві штанги з рейками переміщуються в протилежних напрямках, змінюючи загальну довжину кінематичної ланки.
Механізм лінійних переміщень
Номер патенту: 49572
Опубліковано: 26.04.2010
Автори: Павленко Іван Іванович, Коваль Роман Олександрович, Валявський Іван Анатолійович
МПК: F16H 55/00
Мітки: переміщень, механізм, лінійних
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої і гвинтової передач, який відрізняється тим, що гвинтова передача виконана хвильовою.
Попередній патент: Спосіб дистанційної зміни параметрів розчинів
Наступний патент: Пристрій для виконання обчислень в полі gf(2n)
Випадковий патент: Пристрій автоматизованого цифрового знімання предметів дорожнього комплексу