Валявський Іван Анатолійович
Верстат-гексапод
Номер патенту: 88988
Опубліковано: 10.04.2014
Автори: Валявський Іван Анатолійович, Павленко Іван Іванович, Вахніченко Дмитро Володимирович, Вахніченко Руслан Володимирович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи рухомої платформи, які шарнірно зв'язані кінематичними ланками змінної довжини, робочого столу, змонтованого на платформі, робочий стіл складається з нерухомої платформи, кінематичних ланок та рухомої платформи із заготовкою, на рухомій платформі змонтована шпиндельна головка, яка складається з нерухомої платформи, кінематичних ланок та рухомої платформи, де встановлюється інструмент,...
Опорний шарнір
Номер патенту: 69999
Опубліковано: 25.05.2012
Автори: Валявський Іван Анатолійович, Вахніченко Дмитро Володимирович, Солових Ігор Костянтинович, Павленко Іван Іванович
МПК: F16C 11/00
Формула / Реферат:
Опорний шарнір складається із основи з кульковим підшипником, кронштейна, двох кулькових підшипників, осі, двох кришок та стержня, який відрізняється тим, що вісь обертається на підшипниках, встановлених у кронштейні, що обмежує рух стержня лише нижньою основою кронштейна.
Верстат-гексапод
Номер патенту: 64804
Опубліковано: 25.11.2011
Автори: Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович, Павленко Іван Іванович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що містить нерухому шестигранну конічну основу, на площинах якої розташовані напрямні, рухомий виконавчий орган з відповідним інструментом, шість кінематичних ланок та механізм лінійних переміщень опорних шарнірів, який відрізняється тим, що використовуються кінематичні ланки змінної довжини, які з'єднують рухомий виконавчий орган з нерухомою основою.
Верстат-гексапод
Номер патенту: 63442
Опубліковано: 10.10.2011
Автори: Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович, Павленко Іван Іванович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з основи, трьох штанг, кільця та платформи, з'єднаних шістьма додатковими напрямними у формі конічної стрижневої ферми, шести опорних шарнірів, виконавчого органа з відповідним інструментом і шести кінематичних ланок змінної довжини, на основі змонтований робочий стіл з оброблюваною деталлю, який відрізняється тим, що кінематичні ланки, які з'єднують напрямні, розташовані на нерухомій основі з рухомим...
Механізм лінійних переміщень
Номер патенту: 63440
Опубліковано: 10.10.2011
Автори: Павленко Іван Іванович, Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: лінійних, переміщень, механізм
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої передачі та гвинтової передачі з лівою та правою різьбами на кінцях, двох порожнистих штанг з гайками і двох трубчастих корпусів, який відрізняється тим, що обертання гвинта з лівою та правою різьбами на кінцях примушує дві порожнисті штанги з відповідними гайками переміщуватися у протилежних напрямках, змінюючи загальну довжину кінематичної ланки.
Верстат-гексапод
Номер патенту: 63437
Опубліковано: 10.10.2011
Автори: Валявський Іван Анатолійович, Павленко Іван Іванович, Вахніченко Дмитро Володимирович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи з робочим столом, рухомої платформи, на якій змонтована шпиндельна головка, та шести кінематичних ланок змінної довжини, що шарнірно з'єднують рухому і нерухому платформи, робочий стіл виконаний за схемою гексапода і складається з нерухомої і рухомої платформ, які також шарнірно зв'язані кінематичними ланками змінної довжини, який відрізняється тим, що застосовується робочий стіл,...
Багатоцільовий верстат-гексапод
Номер патенту: 63433
Опубліковано: 10.10.2011
Автори: Валявський Іван Анатолійович, Вахніченко Дмитро Володимирович, Валявський Анатолій Іванович, Павленко Іван Іванович
МПК: B23Q 1/00
Мітки: багатоцільовий, верстат-гексапод
Формула / Реферат:
Багатоцільовий верстат-гексапод, що складається з нерухомої платформи, на якій розташована рухома платформа, призначена для закріплення та надання заготовці шести координатних рухів, і рухома платформа - для інструмента, який також реалізує шість координатних рухів, рухома платформа зв'язана з основою шістьма кінематичними ланками змінної довжини, а друга рухома платформа - з'єднана шістьма кінематичними ланками, який відрізняється тим, що...
Верстат-гексапод
Номер патенту: 63432
Опубліковано: 10.10.2011
Автори: Павленко Іван Іванович, Валявський Анатолій Іванович, Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи з робочим столом, рухомої платформи, на якій змонтована шпиндельна головка, та шести кінематичних ланок змінної довжини, шпиндельна головка складається з нерухомої та рухомої платформ, що шарнірно зв'язані шістьма кінематичними ланками змінної довжини, який відрізняється тим, що використовується шпиндельна головка, виконана за схемою гексапод, що надає інструменту додатково шість...
Механізм лінійних переміщень
Номер патенту: 63423
Опубліковано: 10.10.2011
Автори: Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович, Валявський Анатолій Іванович, Павленко Іван Іванович
МПК: F16H 25/22
Мітки: переміщень, лінійних, механізм
Формула / Реферат:
Механізм лінійних переміщень, що складається з корпуса, двох штанг, рейкового колеса, зубчастої конічної передачі, електродвигуна, який відрізняється тим, що, при обертанні рейкового колеса, дві штанги з рейками переміщуються в протилежних напрямках, змінюючи загальну довжину кінематичної ланки.
Механізм лінійних переміщень
Номер патенту: 49572
Опубліковано: 26.04.2010
Автори: Валявський Іван Анатолійович, Коваль Роман Олександрович, Павленко Іван Іванович
МПК: F16H 55/00
Мітки: лінійних, механізм, переміщень
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої і гвинтової передач, який відрізняється тим, що гвинтова передача виконана хвильовою.
Механізм лінійних переміщень
Номер патенту: 48333
Опубліковано: 10.03.2010
Автори: Валявський Іван Анатолійович, Валявський Анатолій Іванович, Павленко Іван Іванович
МПК: F16C 13/00
Мітки: переміщень, лінійних, механізм
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої та гвинтової передач, порожнистої рухомої штанги та трубчастого корпусу, який відрізняється тим, що між корпусом зубчастої передачі та гвинтом встановлений упорний підшипник.
Механізм лінійних переміщень
Номер патенту: 44754
Опубліковано: 12.10.2009
Автори: Валявський Іван Анатолійович, Павленко Іван Іванович, Валявський Анатолій Іванович
МПК: F16H 25/22
Мітки: лінійних, механізм, переміщень
Формула / Реферат:
Механізм лінійних переміщень, який складається з двигуна, зубчастої та гвинтової передач, довгої порожнистої штанги і трубчастого корпусу, який відрізняється тим, що гвинтова передача розміщена всередині порожнистої штанги з гайкою з можливістю її лінійного переміщення відносно трубчастого корпусу.
Верстат
Номер патенту: 3035
Опубліковано: 15.10.2004
Автори: Чернявський Святослав Олексійович, Пестунов Володимир Михайлович, Крижанівський Володимир Андрійович, Валявський Іван Анатолійович
МПК: B23B 41/00
Мітки: верстат
Формула / Реферат:
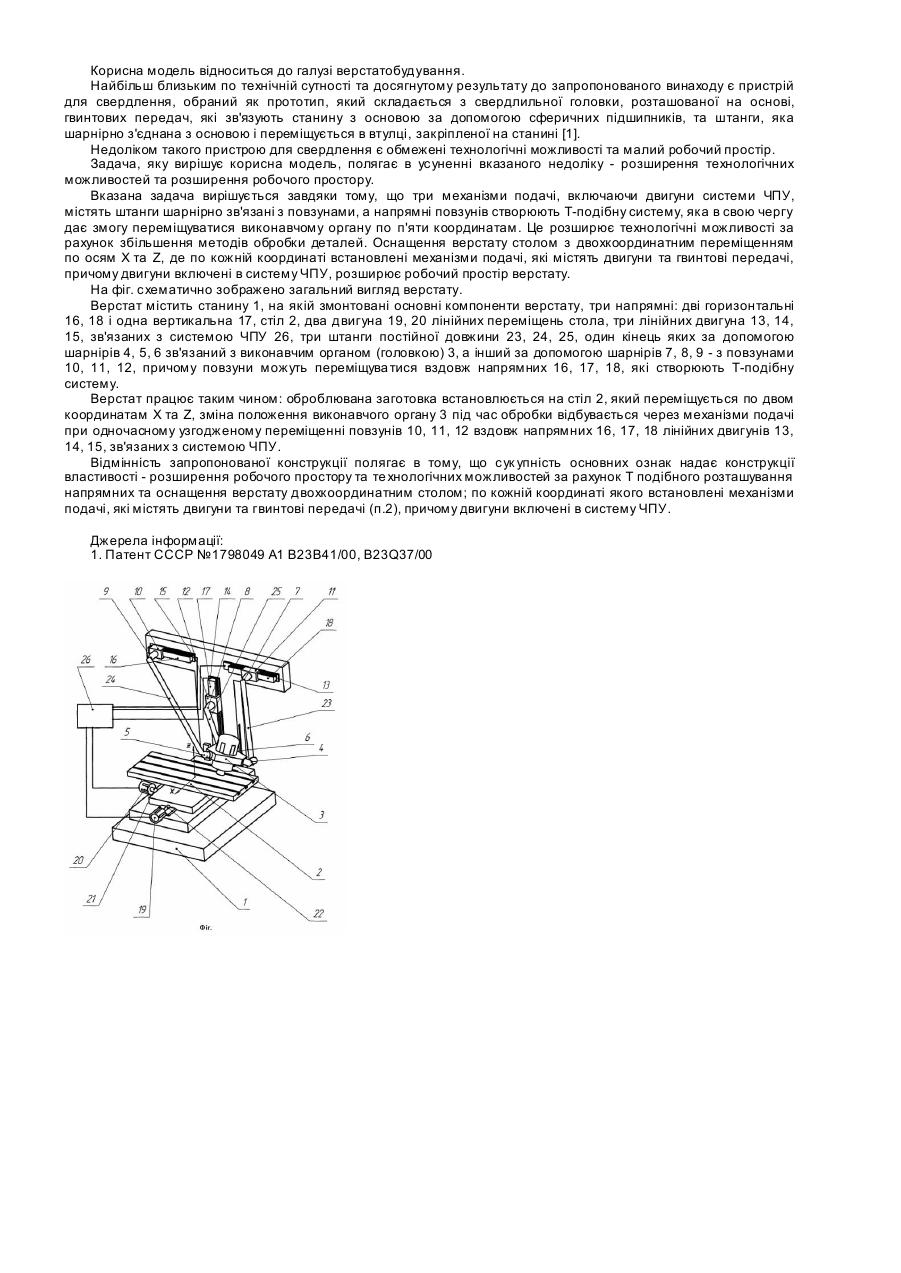
Верстат, який складається з станини двокоординатного столу, головки та напрямних, який відрізняється тим, що головка зв'язана з напрямними трьома штангами постійної довжини, шарніри яких виконані з можливістю переміщення вздовж напрямних, що утворюють Т-подібну систему.
Верстат-гексапод
Номер патенту: 54937
Опубліковано: 17.03.2003
Автори: Крижанівський Володимир Андрійович, Валявський Іван Анатолійович
МПК: B21D 5/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, який складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами, який відрізняється тим, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі.
Стіл
Номер патенту: 54936
Опубліковано: 17.03.2003
Автори: Валявський Іван Анатолійович, Крижанівський Володимир Андрійович
МПК: B23Q 1/00
Мітки: стіл
Формула / Реферат:
Стіл, який складається з основи, виконаної у вигляді призми, рухомої платформи, шести штанг постійної довжини, кінці яких шарнірно зв'язані з рухомою платформою та основою, який відрізняється тим, що шарніри, які зв'язують штанги з основою, виконані з можливістю переміщення вздовж напрямних, розташованих на гранях основи.