Павленко Іван Іванович
Установка для вимірювання розподілу осьового зусилля між штангами верстата з мпс
Номер патенту: 122397
Опубліковано: 10.01.2018
Автори: Павленко Іван Іванович, Вахніченко Дмитро Володимирович
МПК: B23Q 17/00, G01L 5/00
Мітки: штангами, розподілу, осьового, установка, верстата, вимірювання, мпс, зусилля
Формула / Реферат:
Установка для вимірювання розподілу осьового зусилля між штангами верстата з механізмами паралельної структури (МПС), що містить дослідний зразок верстата з МПС, рухому платформу, до якої прикріплено тензодатчики, які з'єднують дану платформу з нижніми опорами штанг та підключаються до загального вимірювального блока, на який виводять результати вимірювання зусиль на штангах від розподілу осьового зусилля на інструменті, що створюється...
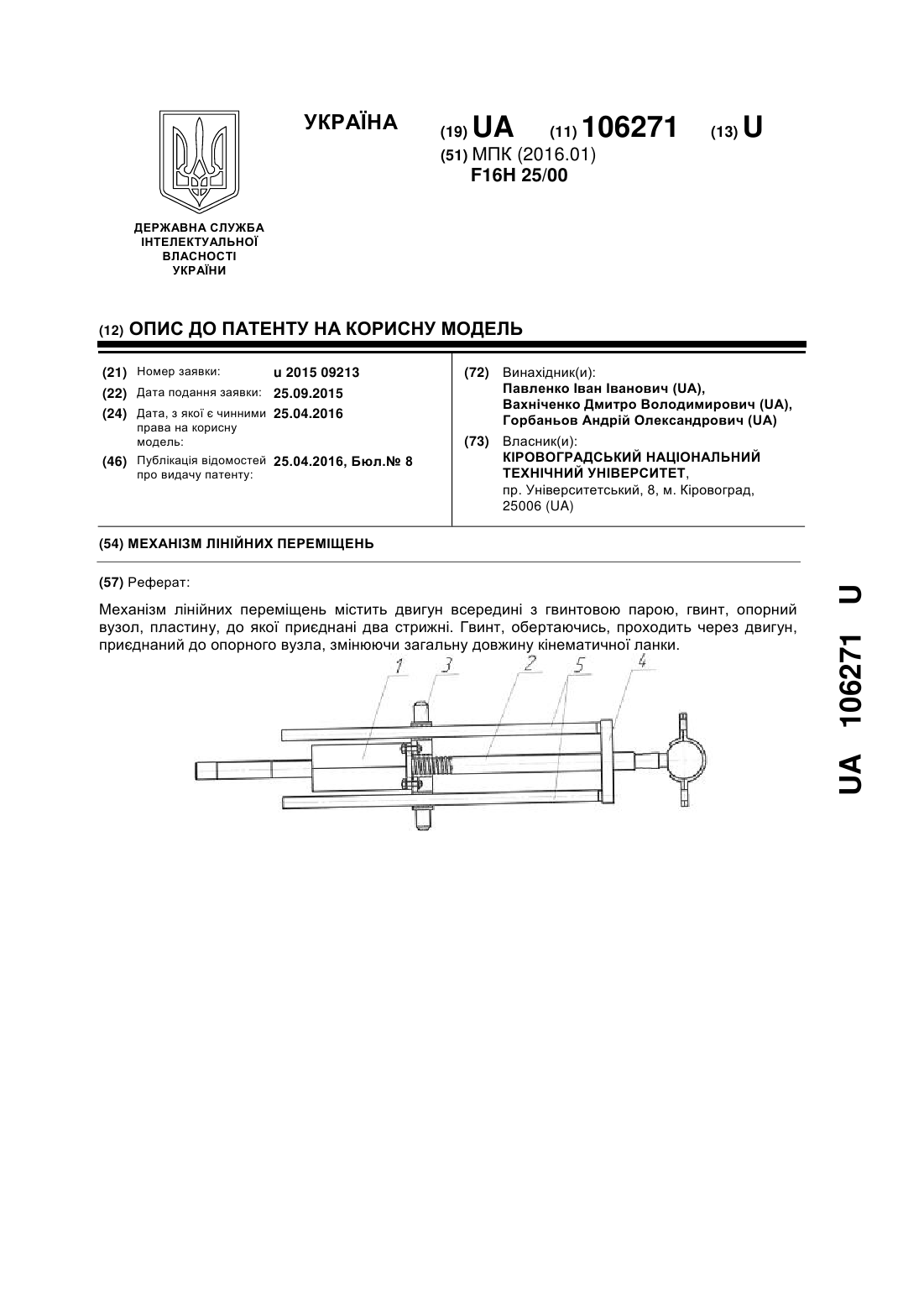
Механізм лінійних переміщень
Номер патенту: 106271
Опубліковано: 25.04.2016
Автори: Вахніченко Дмитро Володимирович, Горбаньов Андрій Олександрович, Павленко Іван Іванович
МПК: F16H 25/00
Мітки: переміщень, механізм, лінійних
Формула / Реферат:
Механізм лінійних переміщень, що містить двигун всередині з гвинтовою парою, гвинт, опорний вузол, пластину, до якої приєднані два стрижні, який відрізняється тим, що гвинт, обертаючись, проходить через двигун, приєднаний до опорного вузла, змінюючи загальну довжину кінематичної ланки.
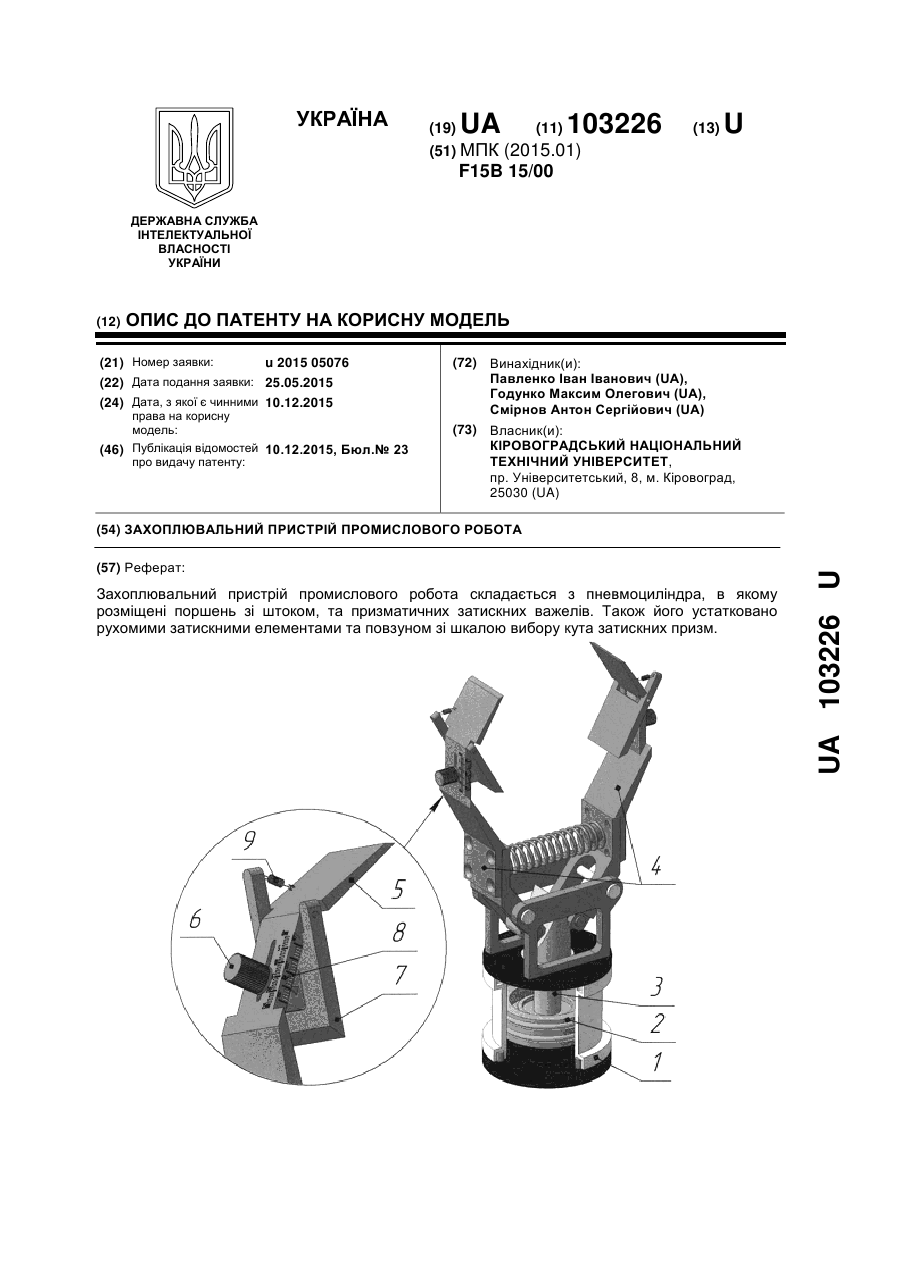
Захоплювальний пристрій промислового робота
Номер патенту: 103226
Опубліковано: 10.12.2015
Автори: Павленко Іван Іванович, Годунко Максим Олегович, Смірнов Антон Сергійович
МПК: F15B 15/00
Мітки: робота, промислового, захоплювальний, пристрій
Формула / Реферат:
Захоплювальний пристрій промислового робота, який складається з пневмоциліндра, в якому розміщені поршень зі штоком, та призматичних затискних важелів, який відрізняється тим, що його устатковано рухомими затискними елементами та повзуном зі шкалою вибору кута затискних призм.
Опорний шарнір

Номер патенту: 101939
Опубліковано: 12.10.2015
Автори: Костюк Євген Сергійович, Павленко Іван Іванович, Вахніченко Дмитро Володимирович
МПК: B23Q 1/32
Формула / Реферат:
Опорний шарнір, який складається із двох стійок, на кожну з яких встановлено опорні підшипники в опорах, в підшипники встановлено осі, на яких тримається кронштейн, який відрізняється тим, що на ньому встановлені два підшипникові вузли з рухомими осями, на яких встановлено виконавчу ланку.
Захватний пристрій промислового робота
Номер патенту: 89728
Опубліковано: 25.04.2014
Автори: Годунко Максим Олегович, Павленко Іван Іванович, Заліпський Олег Миколайович
МПК: F15B 15/00
Мітки: промислового, пристрій, робота, захватний
Формула / Реферат:
Захватний пристрій промислового робота, що містить пневмоциліндр, в якому розміщені поршень зі штоком та приєднані до штока затискні важелі із затискними елементами, який відрізняється тим, що оснащений рухомими затискними елементами та ексцентриком для вибору кута їх приєднання.
Верстат-гексапод
Номер патенту: 88988
Опубліковано: 10.04.2014
Автори: Валявський Іван Анатолійович, Вахніченко Руслан Володимирович, Вахніченко Дмитро Володимирович, Павленко Іван Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи рухомої платформи, які шарнірно зв'язані кінематичними ланками змінної довжини, робочого столу, змонтованого на платформі, робочий стіл складається з нерухомої платформи, кінематичних ланок та рухомої платформи із заготовкою, на рухомій платформі змонтована шпиндельна головка, яка складається з нерухомої платформи, кінематичних ланок та рухомої платформи, де встановлюється інструмент,...
Опорний шарнір

Номер патенту: 88987
Опубліковано: 10.04.2014
Автори: Павленко Іван Іванович, Вахніченко Дмитро Володимирович
МПК: B23Q 1/00
Формула / Реферат:
Опорний шарнір, що містить дві стійки, на кожну з яких встановлено підшипники в опорах, в підшипники встановлено осі, на яких тримається кронштейн, на якому встановлено підшипниковий вузол з рухомою віссю, на яку встановлено виконавчу ланку, який відрізняється тим, що орієнтація виконавчої ланки в вертикальній площині виконується обертанням виконавчої ланки на рухомій осі, яка встановлена у підшипниковий вузол.
Захоплювальний пристрій промислового робота
Номер патенту: 84583
Опубліковано: 25.10.2013
Автори: Павленко Іван Іванович, Кіріченко Іван Дмитрович, Годунко Максим Олегович
МПК: C23C 4/00
Мітки: пристрій, захоплювальний, промислового, робота
Формула / Реферат:
Захоплювальний пристрій промислового робота, який містить пневмоциліндр, в якому розміщені поршень зі штоком, та приєднані до штока затискні важелі із затискними елементами, який відрізняється тим, що його встатковано рухомими затискними елементами, регулюючим гвинтом та шкалою для вибору кута їх приєднання.
Захоплювальний пристрій промислового робота

Номер патенту: 71952
Опубліковано: 25.07.2012
Автори: Годунко Максим Олегович, Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: B25J 15/00
Мітки: робота, захоплювальний, промислового, пристрій
Формула / Реферат:
Захоплювальний пристрій промислового робота, який складається з пневмоприводу, корпусу та призматичних затискних важелів, який відрізняється тим, що важелі з'єднані пружиною розтиску, яка встановлена між короткими їх частинами відносно опор.
Опорний шарнір
Номер патенту: 69999
Опубліковано: 25.05.2012
Автори: Вахніченко Дмитро Володимирович, Солових Ігор Костянтинович, Павленко Іван Іванович, Валявський Іван Анатолійович
МПК: F16C 11/00
Формула / Реферат:
Опорний шарнір складається із основи з кульковим підшипником, кронштейна, двох кулькових підшипників, осі, двох кришок та стержня, який відрізняється тим, що вісь обертається на підшипниках, встановлених у кронштейні, що обмежує рух стержня лише нижньою основою кронштейна.
Захоплювальний пристрій промислового робота
Номер патенту: 66207
Опубліковано: 26.12.2011
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович, Годунко Максим Олегович
МПК: B25J 15/00
Мітки: захоплювальний, пристрій, робота, промислового
Формула / Реферат:
Захоплювальний пристрій промислового робота, що складається з пневмоприводу, корпусу та приєднаних до останнього затискних важелів з призматичними затискними елементами, який відрізняється тим, що він містить два рухомі фіксатори та чотири пази для зміни відстані між опорами затискних важелів.
Двозахватний пристрій робота

Номер патенту: 65163
Опубліковано: 25.11.2011
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович, Годунко Максим Олегович
МПК: B23Q 3/06, B25J 18/00
Мітки: робота, двозахватний, пристрій
Формула / Реферат:
Двозахватний пристрій робота, що складається з корпуса, фланця, захватів, циліндрів зміни захватів місцями з шток-рейками, шестерень та підшипників, який відрізняється тим, що корпус виконаний у вигляді вилки.
Верстат-гексапод
Номер патенту: 64804
Опубліковано: 25.11.2011
Автори: Павленко Іван Іванович, Валявський Анатолій Іванович, Валявський Іван Анатолійович, Вахніченко Дмитро Володимирович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що містить нерухому шестигранну конічну основу, на площинах якої розташовані напрямні, рухомий виконавчий орган з відповідним інструментом, шість кінематичних ланок та механізм лінійних переміщень опорних шарнірів, який відрізняється тим, що використовуються кінематичні ланки змінної довжини, які з'єднують рухомий виконавчий орган з нерухомою основою.
Верстат-гексапод
Номер патенту: 63442
Опубліковано: 10.10.2011
Автори: Валявський Іван Анатолійович, Вахніченко Дмитро Володимирович, Павленко Іван Іванович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з основи, трьох штанг, кільця та платформи, з'єднаних шістьма додатковими напрямними у формі конічної стрижневої ферми, шести опорних шарнірів, виконавчого органа з відповідним інструментом і шести кінематичних ланок змінної довжини, на основі змонтований робочий стіл з оброблюваною деталлю, який відрізняється тим, що кінематичні ланки, які з'єднують напрямні, розташовані на нерухомій основі з рухомим...
Механізм лінійних переміщень
Номер патенту: 63440
Опубліковано: 10.10.2011
Автори: Вахніченко Дмитро Володимирович, Валявський Анатолій Іванович, Валявський Іван Анатолійович, Павленко Іван Іванович
МПК: B23Q 1/00
Мітки: переміщень, механізм, лінійних
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої передачі та гвинтової передачі з лівою та правою різьбами на кінцях, двох порожнистих штанг з гайками і двох трубчастих корпусів, який відрізняється тим, що обертання гвинта з лівою та правою різьбами на кінцях примушує дві порожнисті штанги з відповідними гайками переміщуватися у протилежних напрямках, змінюючи загальну довжину кінематичної ланки.
Верстат-гексапод
Номер патенту: 63437
Опубліковано: 10.10.2011
Автори: Павленко Іван Іванович, Валявський Іван Анатолійович, Валявський Анатолій Іванович, Вахніченко Дмитро Володимирович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи з робочим столом, рухомої платформи, на якій змонтована шпиндельна головка, та шести кінематичних ланок змінної довжини, що шарнірно з'єднують рухому і нерухому платформи, робочий стіл виконаний за схемою гексапода і складається з нерухомої і рухомої платформ, які також шарнірно зв'язані кінематичними ланками змінної довжини, який відрізняється тим, що застосовується робочий стіл,...
Багатоцільовий верстат-гексапод
Номер патенту: 63433
Опубліковано: 10.10.2011
Автори: Павленко Іван Іванович, Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович, Валявський Анатолій Іванович
МПК: B23Q 1/00
Мітки: багатоцільовий, верстат-гексапод
Формула / Реферат:
Багатоцільовий верстат-гексапод, що складається з нерухомої платформи, на якій розташована рухома платформа, призначена для закріплення та надання заготовці шести координатних рухів, і рухома платформа - для інструмента, який також реалізує шість координатних рухів, рухома платформа зв'язана з основою шістьма кінематичними ланками змінної довжини, а друга рухома платформа - з'єднана шістьма кінематичними ланками, який відрізняється тим, що...
Верстат-гексапод
Номер патенту: 63432
Опубліковано: 10.10.2011
Автори: Валявський Іван Анатолійович, Валявський Анатолій Іванович, Вахніченко Дмитро Володимирович, Павленко Іван Іванович
МПК: B23Q 1/00
Мітки: верстат-гексапод
Формула / Реферат:
Верстат-гексапод, що складається з нерухомої платформи з робочим столом, рухомої платформи, на якій змонтована шпиндельна головка, та шести кінематичних ланок змінної довжини, шпиндельна головка складається з нерухомої та рухомої платформ, що шарнірно зв'язані шістьма кінематичними ланками змінної довжини, який відрізняється тим, що використовується шпиндельна головка, виконана за схемою гексапод, що надає інструменту додатково шість...
Механізм лінійних переміщень
Номер патенту: 63423
Опубліковано: 10.10.2011
Автори: Павленко Іван Іванович, Валявський Анатолій Іванович, Вахніченко Дмитро Володимирович, Валявський Іван Анатолійович
МПК: F16H 25/22
Мітки: механізм, переміщень, лінійних
Формула / Реферат:
Механізм лінійних переміщень, що складається з корпуса, двох штанг, рейкового колеса, зубчастої конічної передачі, електродвигуна, який відрізняється тим, що, при обертанні рейкового колеса, дві штанги з рейками переміщуються в протилежних напрямках, змінюючи загальну довжину кінематичної ланки.
Динамічна установка для вимірювання сил затиску
Номер патенту: 55141
Опубліковано: 10.12.2010
Автори: Годунко Максим Олегович, Павленко Іван Іванович
МПК: G01L 1/00
Мітки: динамічна, вимірювання, установка, затиску, сіль
Формула / Реферат:
Динамічна установка для вимірювання сил затиску, що складається з захватного пристрою із рухомими важелями, яка відрізняється тим, що важелі виконано призматичними з пластинами із пружинної сталі, на які прикріплено тензодатчики, що під'єднані до тензостанції з блоком живлення та персонального комп'ютера.
Установка для вимірювання мінімально необхідних сил затиску
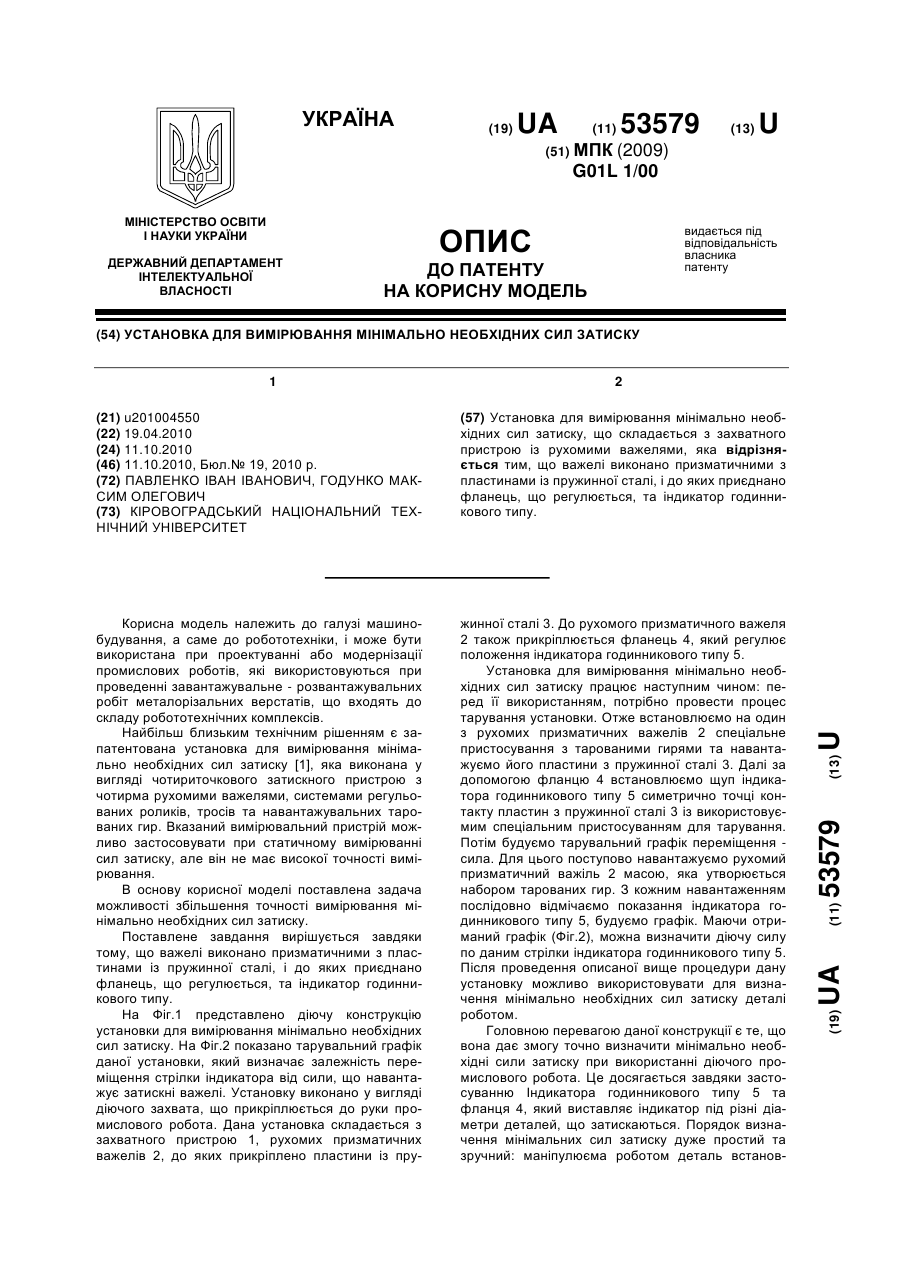
Номер патенту: 53579
Опубліковано: 11.10.2010
Автори: Годунко Максим Олегович, Павленко Іван Іванович
МПК: G01L 1/00
Мітки: вимірювання, мінімальної, сіль, установка, необхідних, затиску
Формула / Реферат:
Установка для вимірювання мінімально необхідних сил затиску, що складається з захватного пристрою із рухомими важелями, яка відрізняється тим, що важелі виконано призматичними з пластинами із пружинної сталі, і до яких приєднано фланець, що регулюється, та індикатор годинникового типу.
Механізм лінійних переміщень
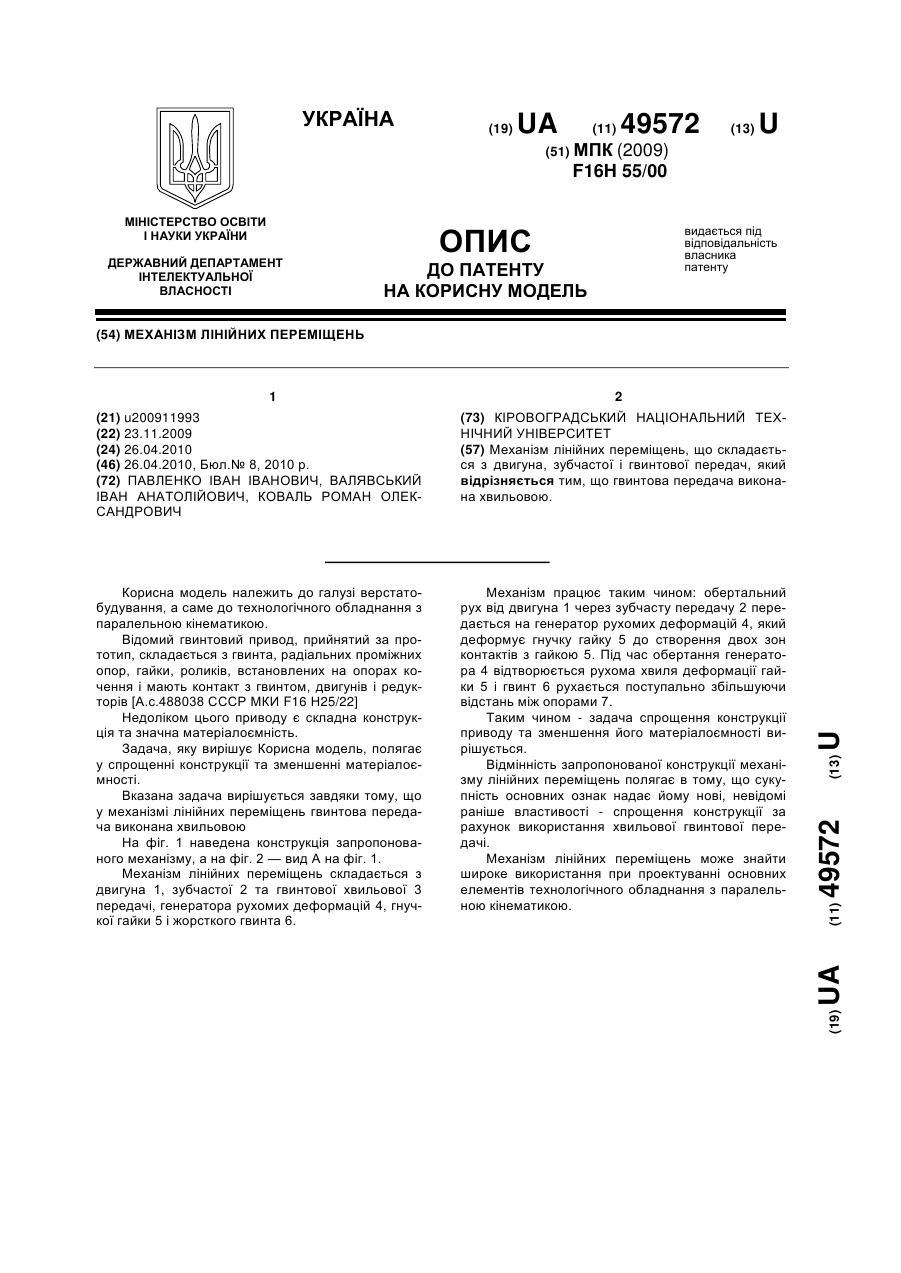
Номер патенту: 49572
Опубліковано: 26.04.2010
Автори: Коваль Роман Олександрович, Валявський Іван Анатолійович, Павленко Іван Іванович
МПК: F16H 55/00
Мітки: переміщень, механізм, лінійних
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої і гвинтової передач, який відрізняється тим, що гвинтова передача виконана хвильовою.
Механізм лінійних переміщень
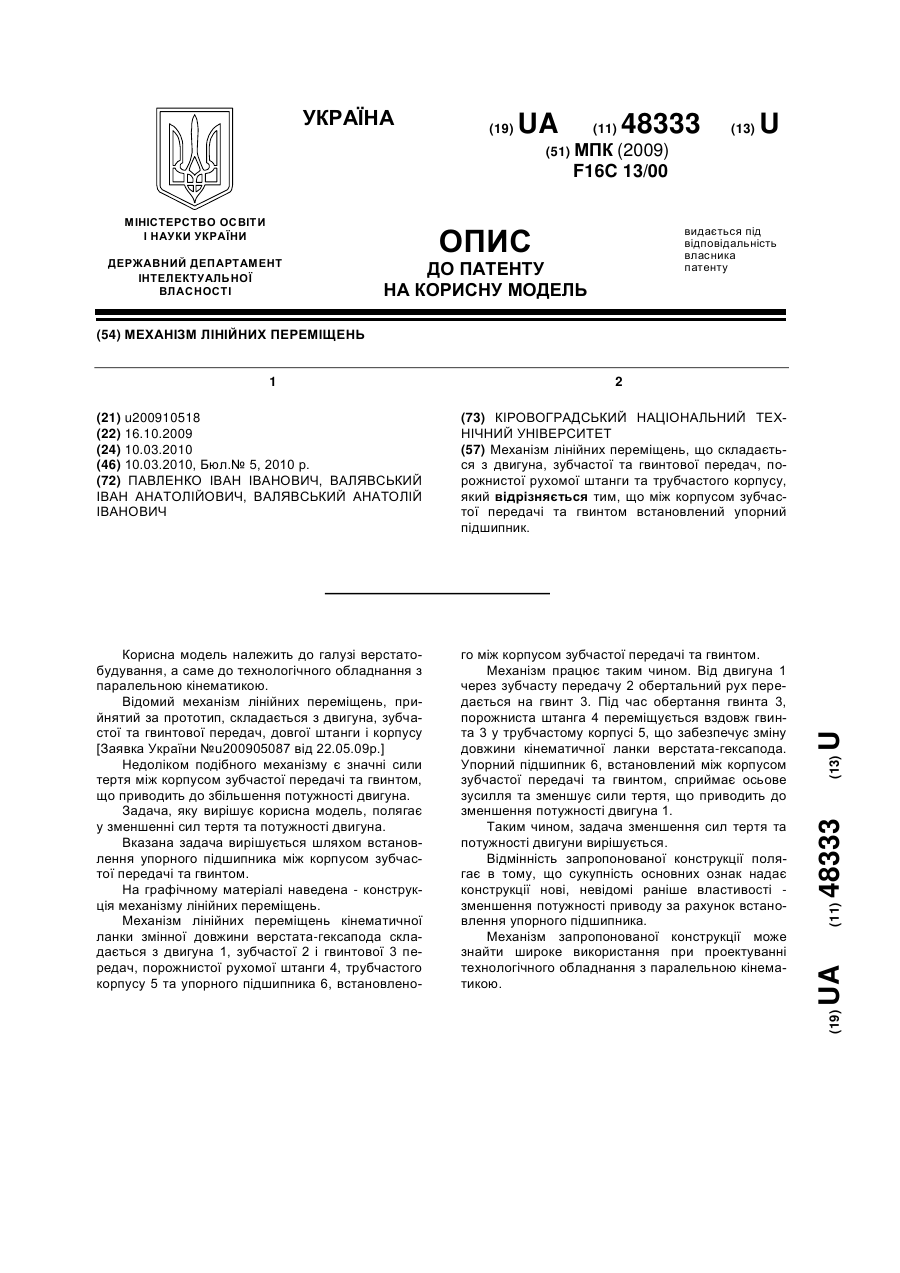
Номер патенту: 48333
Опубліковано: 10.03.2010
Автори: Валявський Іван Анатолійович, Павленко Іван Іванович, Валявський Анатолій Іванович
МПК: F16C 13/00
Мітки: механізм, переміщень, лінійних
Формула / Реферат:
Механізм лінійних переміщень, що складається з двигуна, зубчастої та гвинтової передач, порожнистої рухомої штанги та трубчастого корпусу, який відрізняється тим, що між корпусом зубчастої передачі та гвинтом встановлений упорний підшипник.
Механізм лінійних переміщень
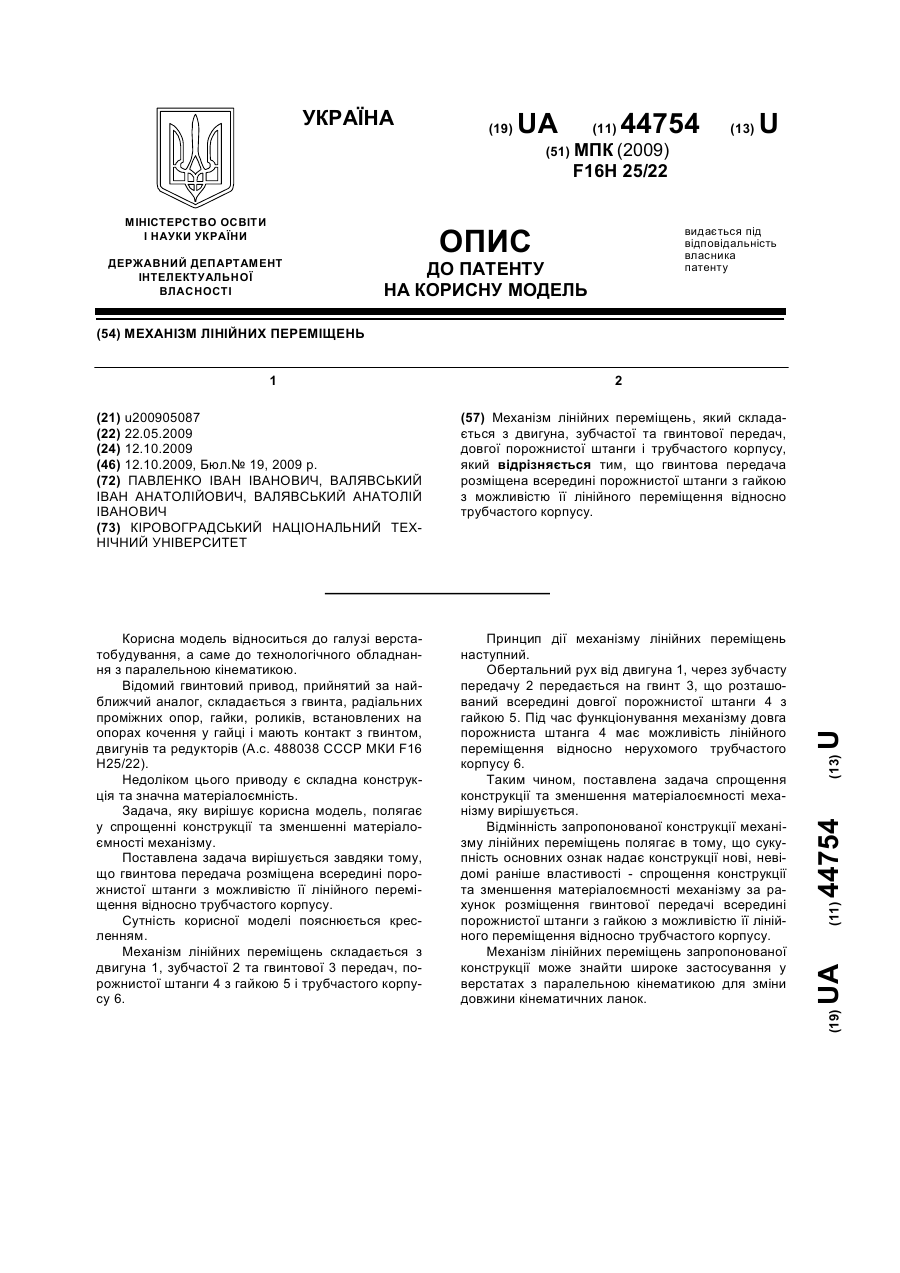
Номер патенту: 44754
Опубліковано: 12.10.2009
Автори: Валявський Іван Анатолійович, Валявський Анатолій Іванович, Павленко Іван Іванович
МПК: F16H 25/22
Мітки: механізм, переміщень, лінійних
Формула / Реферат:
Механізм лінійних переміщень, який складається з двигуна, зубчастої та гвинтової передач, довгої порожнистої штанги і трубчастого корпусу, який відрізняється тим, що гвинтова передача розміщена всередині порожнистої штанги з гайкою з можливістю її лінійного переміщення відносно трубчастого корпусу.
Установка для вимірювання мінімально необхідних сил затиску
Номер патенту: 42044
Опубліковано: 25.06.2009
Автори: Годунко Максим Олегович, Павленко Іван Іванович
МПК: G01L 1/00
Мітки: необхідних, вимірювання, сіль, мінімальної, затиску, установка
Формула / Реферат:
Установка для вимірювання мінімально необхідних сил затиску, що складається з тарованих гирь та важелів, яка відрізняється тим, що вона виконана у вигляді чотириточкового затискного пристрою з чотирма рухомими важелями, системами регульованих роликів, тросів та навантажувальних тарованих гирь.
Спосіб вимірювання сил затиску
Номер патенту: 39779
Опубліковано: 10.03.2009
Автори: Павленко Іван Іванович, Годунко Максим Олегович
МПК: G01L 1/00
Мітки: сіль, спосіб, вимірювання, затиску
Формула / Реферат:
Спосіб вимірювання сил затиску, згідно з яким сили визначаються шкалою, відносно якої рухається важіль з гирями, який відрізняється тим, що мінімально необхідні сили затиску деталі визначаються можливістю утримання її двома важелями.
Установка для вимірювання мінімально необхідних сил затиску
Номер патенту: 39778
Опубліковано: 10.03.2009
Автори: Павленко Іван Іванович, Годунко Максим Олегович
МПК: G01L 1/00
Мітки: сіль, мінімальної, установка, затиску, необхідних, вимірювання
Формула / Реферат:
Установка для вимірювання мінімально необхідних сил затиску, що складається з тарованих гирь та двох нерівноплечих важелів, яка відрізняється тим, що останні виконано з кутовою шкалою та рухомими затискними елементами.
Захоплювальний пристрій промислового робота

Номер патенту: 32260
Опубліковано: 12.05.2008
Автори: Павленко Іван Іванович, Годунко Максим Олегович, Мажара Віталій Анатолійович
МПК: B65H 9/10
Мітки: захоплювальний, промислового, робота, пристрій
Формула / Реферат:
Захоплювальний пристрій промислового робота, що складається з пневмоциліндра, в якому розміщені поршень зі штоком, та приєднаних до штока затискних важелів з чотирма призматичними затискними елементами, який відрізняється тим, що два призматичні затискні елементи виконано рухомими.
Захватний пристрій промислового робота
Номер патенту: 24280
Опубліковано: 25.06.2007
Автори: Годунко Максим Олегович, Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: B23B 15/00, B23Q 7/04
Мітки: промислового, робота, пристрій, захватний
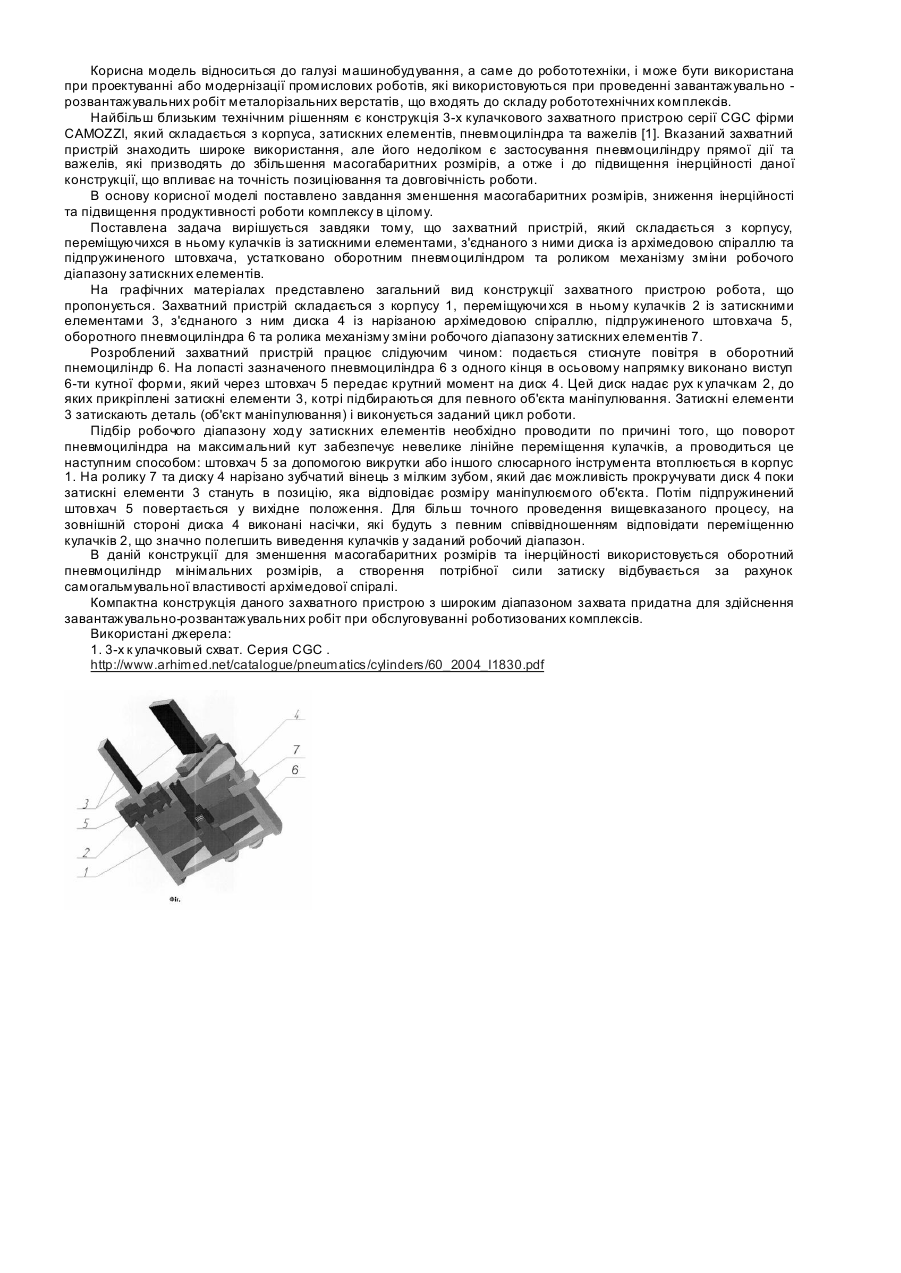
Формула / Реферат:
Захватний пристрій промислового робота, який складається з корпусу, кулачків із затискними елементами, що переміщуються в корпусі з'єднаного з ними диска із архімедовою спіраллю, та підпружиненого штовхача, який відрізняється тим, що його устатковано оборотним пневмоциліндром та роликом механізму зміни робочого діапазону затискних елементів.
Двозахватний пристрій промислового робота

Номер патенту: 18720
Опубліковано: 15.11.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович, Годунко Максим Олегович
МПК: B25J 18/00, B23Q 3/06
Мітки: промислового, робота, двозахватний, пристрій
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, який складається з механізму зміни захватів місцями, фланця, кисті та захватів, який відрізняється тим, що його устатковано гальмівним механізмом, а вісь захвату виконано паралельно осі руки робота.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що як гальмівний механізм використано гідравлічні демпфери.
Двозахоплювальний пристрій промислового робота

Номер патенту: 18300
Опубліковано: 15.11.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович
МПК: B65H 09/00
Мітки: промислового, робота, пристрій, двозахоплювальний
Формула / Реферат:
Двозахоплювальний пристрій промислового робота для одночасного затискання двох деталей, що складається з корпусу, в якому розміщені шток-рейка, з поршнем всередині, та рейкове колесо, пневмоциліндра, важеля, фланця та захоплювачів, який відрізняється тим, що його устатковано рейковим механізмом, а один із захоплювачів виконано підпружиненим.
Спосіб обробки отворів
Номер патенту: 17470
Опубліковано: 15.09.2006
Автори: Павленко Іван Іванович, Кабулов Костянтин Борисович, Пестунов Володимир Михайлович
МПК: B23B 1/00
Мітки: отворів, обробки, спосіб
Формула / Реферат:
Спосіб обробки отворів, при якому до заготівки підводиться напрямна втулка і фіксується в технологічній системі верстата до закінчення процесу обробки, який відрізняється тим, що напрямну втулку спочатку встановлюють на супутник і базують по отвору, а потім супутник встановлюють і закріплюють у шпинделі з базуванням по отвору шпинделя, після чого за допомогою шпинделя супутник підводять до заготівки, де фіксують напрямну втулку, після чого...
Спосіб зміни захватів місцями
Номер патенту: 17139
Опубліковано: 15.09.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович
МПК: F16H 19/00
Мітки: місцями, захватів, спосіб, зміни
Формула / Реферат:
Спосіб зміни захватів місцями, згідно з яким захвати промислового робота виходять у спільну точку чи змінюються місцями за допомогою обертових або поступальних рухів, який відрізняється тим, що для зміни захватів місцями використовують комбінований рух захватів.
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: F16S 5/00
Мітки: двозахватний, промислового, робота, пристрій
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Робототехнічний комплекс
Номер патенту: 10156
Опубліковано: 15.11.2005
Автори: Павленко Іван Іванович, Крамар Артем Володимирович, Пестунов Володимир Михайлович
МПК: B23Q 39/00
Мітки: комплекс, робототехнічний
Формула / Реферат:
1. Робототехнічний комплекс, що містить переналагоджуваний багатопозиційний агрегатний верстат із затискними пристроями і промисловий робот, який відрізняється тим, що затискні пристрої виконані у вигляді магнітних плит, а робот оснащений щонайменше двокоординатною системою управління переміщення руки та змінними модулями захоплювача заготовки.2. Комплекс за п. 1, який відрізняється тим, що система управління по кожній координаті...
Багатоопераційний верстат
Номер патенту: 9417
Опубліковано: 15.09.2005
Автори: Пестунов Володимир Михайлович, Павленко Іван Іванович, Крамар Артем Володимирович
МПК: B23Q 15/00, B23B 11/00
Мітки: багатоопераційний, верстат
Формула / Реферат:
1. Багатоопераційний верстат, що містить приводи головного руху, принаймні два шпинделі з патронами закріплення заготовки, два супорти, встановлених на напрямних паралельного та перпендикулярного осі шпинделів переміщень, який відрізняється тим, що шпинделі розташовані вертикально, а нижній шпиндель оснащено двопозиційною поворотною головкою, в одній із позицій якої розміщено патрон для закріплення заготовки, а в другій позиції - патрон для...
Багатоопераційний верстат
Номер патенту: 5095
Опубліковано: 15.02.2005
Автори: Пестунов Володимир Михайлович, Крамар Артем Володимирович, Павленко Іван Іванович
МПК: B23Q 15/00, B23Q 3/157, B23B 11/00 ...
Мітки: верстат, багатоопераційний
Формула / Реферат:
1. Багатоопераційний верстат, що містить передню бабку, задню бабку, які зв'язані з приводом обертового руху, і два супорти, які оснащені механізмом взаємно перпендикулярного руху подачі, який відрізняється тим, що супорти встановлені на траверсі, розташованій паралельно осям шпинделів передньої та задньої бабок і зв'язаній з механізмом вертикальної подачі.2. Верстат за п. 1, який відрізняється тим, що він оснащений попарно...
Верстатний модуль
Номер патенту: 3876
Опубліковано: 15.12.2004
Автори: Пестунов Володимир Михайлович, Головач Євген Вікторович, Павленко Іван Іванович
Мітки: модуль, верстатний
Формула / Реферат:
Верстатний модуль, що містить дві шпиндельні бабки, одна з яких з’єднана з механізмом повздовжньої подачі, супорт, що з’єднаний з механізмами повздовжньої та поперечної подачі, і систему числового програмного управління (ЧПУ), який відрізняється тим, що задня шпиндельна бабка встановлена на платформі і оснащена механізмом повороту навколо вертикальної осі, яка проходить через вісь шпинделя шпиндельної бабки.