Спосіб вимірювання кутової швидкості коріолісовим вібраційним гіроскопом
Номер патенту: 73632
Опубліковано: 15.08.2005
Автори: Яценко Юрій Олексійович, Коваленко Володимир Анатолійович, Чіковані Валерій Валеріанович

Формула / Реферат
1. Спосіб вимірювання кутової швидкості вібраційним гіроскопом шляхом генерування основної вібраційної хвилі, яка формує опорний сигнал на частоті, близькій або рівній одній з безлічі резонансних мод вібраційної структури, яка містить електроди збудження, електроди управління та інформативні електроди і обертання навколо осі симетрії якої збуджує додаткову вібраційну хвилю, амплітуда якої пропорційна кутовій швидкості обертання або компенсації сили Коріоліса, що виникає, яка формує сигнал управління із зворотним зв'язком, і вимірювання кутової швидкості обертання засобами вимірювання амплітуди сигналу зворотного зв'язку, який відрізняється тим, що на електроди управління додатково подають заздалегідь заданий, синфазний опорному сигнал постійної амплітуди і вимірюють різницю фаз між опорним сигналом і сигналом інформативного електрода, що пропорційна кутовій швидкості обертання вібраційної структури.
2. Спосіб за п. 1, який відрізняється тим, що при вимірюванні кутових швидкостей, що швидко змінюються, додатково до вимірювання амплітуди сигналу зворотного зв'язку вимірюють різницю фаз між опорним сигналом і сигналом інформативного електрода, приводять їх до єдиної міри і об'єднують в один вимір.
Текст
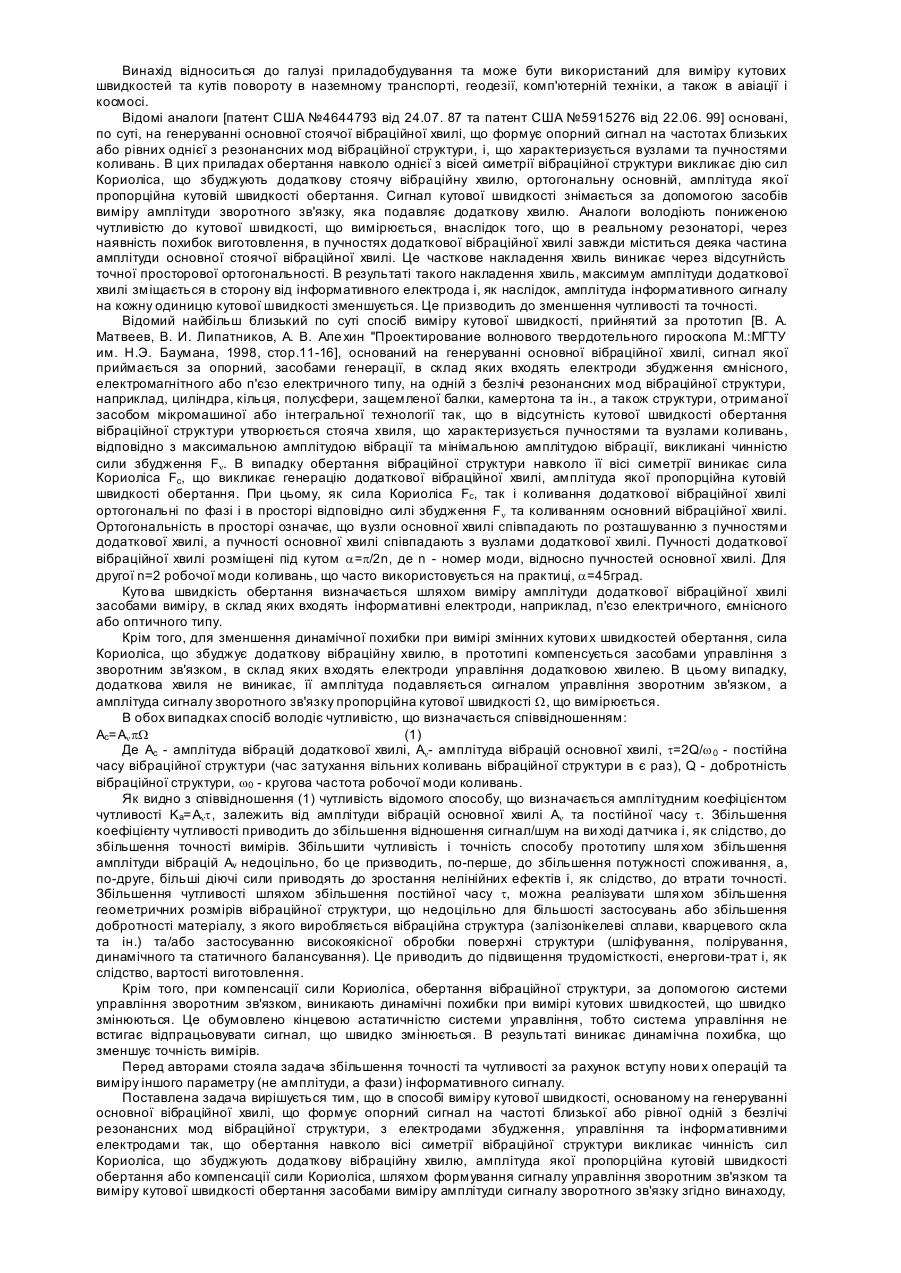
Винахід відноситься до галузі приладобудування та може бути використаний для виміру кутових швидкостей та кутів повороту в наземному транспорті, геодезії, комп'ютерній техніки, а також в авіації і космосі. Відомі аналоги [патент США №4644793 від 24.07. 87 та патент США №5915276 від 22.06. 99] основані, по суті, на генеруванні основної стоячої вібраційної хвилі, що формує опорний сигнал на частотах близьких або рівних однієї з резонансних мод вібраційної структури, і, що характеризується вузлами та пучностями коливань. В цих приладах обертання навколо однієї з вісей симетрії вібраційної структури викликає дію сил Кориоліса, що збуджують додаткову стоячу вібраційну хвилю, ортогональну основній, амплітуда якої пропорційна кутовій швидкості обертання. Сигнал кутової швидкості знімається за допомогою засобів виміру амплітуди зворотного зв'язку, яка подавляє додаткову хвилю. Аналоги володіють пониженою чутливістю до кутової швидкості, що вимірюється, внаслідок того, що в реальному резонаторі, через наявність похибок виготовлення, в пучностях додаткової вібраційної хвилі завжди міститься деяка частина амплітуди основної стоячої вібраційної хвилі. Це часткове накладення хвиль виникає через відсутнйсть точної просторової ортогональності. В результаті такого накладення хвиль, максимум амплітуди додаткової хвилі зміщається в сторону від інформативного електрода і, як наслідок, амплітуда інформативного сигналу на кожну одиницю кутової швидкості зменшується. Це призводить до зменшення чутливості та точності. Відомий найбільш близький по суті спосіб виміру кутової швидкості, прийнятий за прототип [В. А. Матвеев, В. И. Липатников, А. В. Але хин "Проектирование волнового твердотельного гироскопа М.:МГТУ им. Н.Э. Баумана, 1998, стор.11-16], оснований на генеруванні основної вібраційної хвилі, сигнал якої приймається за опорний, засобами генерації, в склад яких входять електроди збудження ємнісного, електромагнітного або п'єзо електричного типу, на одній з безлічі резонансних мод вібраційної структури, наприклад, циліндра, кільця, полусфери, защемленої балки, камертона та ін., а також структури, отриманої засобом мікромашиної або інтегральної технології так, що в відсутність кутової швидкості обертання вібраційної структури утворюється стояча хвиля, що характеризується пучностями та вузлами коливань, відповідно з максимальною амплітудою вібрації та мінімальною амплітудою вібрації, викликані чинністю сили збудження Fn. В випадку обертання вібраційної структури навколо її вісі симетрії виникає сила Кориоліса Fc, що викликає генерацію додаткової вібраційної хвилі, амплітуда якої пропорційна кутовій швидкості обертання. При цьому, як сила Кориоліса Fc, так і коливання додаткової вібраційної хвилі ортогональні по фазі і в просторі відповідно силі збудження Fn та коливанням основний вібраційної хвилі. Ортогональність в просторі означає, що вузли основної хвилі співпадають по розташуванню з пучностями додаткової хвилі, а пучності основної хвилі співпадають з вузлами додаткової хвилі. Пучності додаткової вібраційної хвилі розміщені під кутом a=p/2n, де n - номер моди, відносно пучностей основної хвилі. Для другої n=2 робочої моди коливань, що часто використовується на практиці, a=45град. Куто ва швидкість обертання визначається шляхом виміру амплітуди додаткової вібраційної хвилі засобами виміру, в склад яких входять інформативні електроди, наприклад, п'єзо електричного, ємнісного або оптичного типу. Крім того, для зменшення динамічної похибки при вимірі змінних кутови х швидкостей обертання, сила Кориоліса, що збуджує додаткову вібраційну хвилю, в прототипі компенсується засобами управління з зворотним зв'язком, в склад яких входять електроди управління додатковою хвилею. В цьому випадку, додаткова хвиля не виникає, її амплітуда подавляється сигналом управління зворотним зв'язком, а амплітуда сигналу зворотного зв'язку пропорційна кутової швидкості W, що вимірюється. В обох випадках спосіб володіє чутливістю, що визначається співвідношенням: Ас=Аn pW (1) Де Ас - амплітуда вібрацій додаткової хвилі, Аn- амплітуда вібрацій основної хвилі, t=2Q/w 0 - постійна часу вібраційної структури (час затухання вільних коливань вібраційної структури в є раз), Q - добротність вібраційної структури, w0 - кругова частота робочої моди коливань. Як видно з співвідношення (1) чутливість відомого способу, що визначається амплітудним коефіцієнтом чутливості Κa= Аnt, залежить від амплітуди вібрацій основної хвилі Аn та постійної часу t. Збільшення коефіцієнту чутливості приводить до збільшення відношення сигнал/шум на ви ході датчика і, як слідство, до збільшення точності вимірів. Збільшити чутливість і точність способу прототипу шля хом збільшення амплітуди вібрацій Αν недоцільно, бо це призводить, по-перше, до збільшення потужності споживання, а, по-друге, більші діючі сили приводять до зростання нелінійних ефектів і, як слідство, до втрати точності. Збільшення чутливості шляхом збільшення постійної часу t, можна реалізувати шля хом збільшення геометричних розмірів вібраційної структури, що недоцільно для більшості застосувань або збільшення добротності матеріалу, з якого виробляється вібраційна структура (залізонікелеві сплави, кварцевого скла та ін.) та/або застосуванню високоякісної обробки поверхні структури (шліфування, полірування, динамічного та статичного балансування). Це приводить до підвищення трудомісткості, енергови-трат і, як слідство, вартості виготовлення. Крім того, при компенсації сили Кориоліса, обертання вібраційної структури, за допомогою системи управління зворотним зв'язком, виникають динамічні похибки при вимірі кутових швидкостей, що швидко змінюються. Це обумовлено кінцевою астатичністю системи управління, тобто система управління не встигає відпрацьовувати сигнал, що швидко змінюється. В результаті виникає динамічна похибка, що зменшує точність вимірів. Перед авторами стояла задача збільшення точності та чутливості за рахунок вступу нови х операцій та виміру іншого параметру (не амплітуди, а фази) інформативного сигналу. Поставлена задача вирішується тим, що в способі виміру кутової швидкості, основаному на генеруванні основної вібраційної хвилі, що формує опорний сигнал на частоті близької або рівної одній з безлічі резонансних мод вібраційної структури, з електродами збудження, управління та інформативними електродами так, що обертання навколо вісі симетрії вібраційної структури викликає чинність сил Кориоліса, що збуджують додаткову вібраційну хвилю, амплітуда якої пропорційна кутовій швидкості обертання або компенсації сили Кориоліса, шляхом формування сигналу управління зворотним зв'язком та виміру кутової швидкості обертання засобами виміру амплітуди сигналу зворотного зв'язку згідно винаходу, що пропонується, на керуючі електроди подають заздалегідь заданий, синфазний опорному сигнал постійної амплітуди і вимірюють різність фаз між опорним сигналом та сигналом інформативного електрода, яка пропорційна кутовій швидкості обертання вібраційної структури. При подачі на керуючі електроди сигналу синфазного опорному, з постійною амплітудою Fm=mFn=Amcosotw, де Am=mАn, на інформативних електродах при обертанні вібраційної структури складаються два ортогональних по фазі сигнали: знов створеного Fm=Amcosotw) і сигналу, обумовленого чинністю сили Кориоліса Fc= Асsinotaw. При Цьому, результуючий сигнал що знімається з інформативного електрода рівний: Fp = Am cjsw0t + Ac sin w0 t = A2 + A2 cos(w0 t - j) m c (2) де j = arctg j= Ac A tW t = arctg n = arctg W, Am mAn m t W, ддл W Аn, Ka
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring angular velocity by a vibratory gyroscope sensitive to coriolis acceleration
Назва патенту російськоюСпособ измерения угловой скорости вибрационным гироскопом, чувствительным к кориолисову ускорению
МПК / Мітки
МПК: G01P 9/00
Мітки: вібраційним, коріолісовим, гіроскопом, вимірювання, спосіб, швидкості, кутової
Код посилання
<a href="https://ua.patents.su/4-73632-sposib-vimiryuvannya-kutovo-shvidkosti-koriolisovim-vibracijjnim-giroskopom.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання кутової швидкості коріолісовим вібраційним гіроскопом</a>
Спосіб та пристрій для вимірювання кутової швидкості
Номер патенту: 61044
Опубліковано: 15.10.2003
Автори: Леоненко Костянтин Миколайович, Мурзаханов Олександр Валентинович, Шервашидзе Володимир Варламович
МПК: G01P 9/00
Мітки: вимірювання, швидкості, кутової, спосіб, пристрій
Формула / Реферат:
1. Спосіб для вимірювання кутової швидкості (), який полягає у тому, що подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для подачі напруги, необхідної для розкручування гіромотора до його виходу на стаціонарний режим обертання, на виході датчика вимірюють величину напруги при даному напрямку обертання ротора гіромотора (U+), подають...
Спосіб вимірювання кутової швидкості, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою
Номер патенту: 61160
Опубліковано: 17.11.2003
Автори: Леоненко Сергій Миколайович, Гаврилюк Володимир Леонідович, Шкляр Володимир Петрович, Шервашидзе Володимир Варлаамович, Гуменюк Володимир Григорович, Васильєв Володимир Леонідович, Олексієнко Микола Петрович
Мітки: вимірювання, швидкості, обробки, пристрій, спосіб, диференційних, кутової, здійснення, сигналів, пристрою, блок
Формула / Реферат:
1. Спосіб вимірювання кутової швидкості, за яким визначають переміщення чутливого елемента з гіромотором, який розміщують на об'єкті, кутову швидкість якого виміряють, величину переміщення перетворюють в електричний сигнал, на основі якого формують компенсаційу силу, пропорційну кутовій швидкості вказаного об'єкта, і під впливом якої чутливий елемент повертається у зрівноважене положення, по величині якої визначають величину кутової...
Пристрій для вимірювання кутової швидкості
Номер патенту: 55791
Опубліковано: 15.04.2003
Автори: Кухарчук Василь Васильович, Білинська Марина Йосипівна
МПК: G01P 3/36
Мітки: пристрій, кутової, вимірювання, швидкості
Формула / Реферат:
Пристрій для вимірювання кутової швидкості, що містить освітлювач, об'єктив, багатоелементний фотоприймальний пристрій, який відрізняється тим, що в нього введена багатогранна насадка на контрольований вал, виконана у вигляді правильного багатогранника, обчислювальний пристрій, при цьому освітлювач виконаний у вигляді імпульсного лазера, а багатоелементний фотоприймальний пристрій виконаний у вигляді матриці світлочутливих елементів, оптичний...
Пристрій для вимірювання кутової швидкості та прискорення
Номер патенту: 56722
Опубліковано: 15.05.2003
Автори: Білинський Йосип Йосипович, Кухарчук Василь Васильович, Білинська Марина Йосипівна
МПК: G01P 3/36, G01C 19/00
Мітки: пристрій, швидкості, прискорення, вимірювання, кутової
Формула / Реферат:
Пристрій для вимірювання кутової швидкості та кутового прискорення, який містить освітлювач, контрольований вал, об'єктив, оптично зв'язаний з входом багатоелементного фотоприймального пристрою, який відрізняється тим, що в нього введена насадка на контрольованому валу, виконана у вигляді Архімедової спіралі, оптично зв'язана з освітлювачем, що являє собою напівпровідниковий лазер, об'єктивом і обчислювальним пристроєм, вхід якого зв'язаний з...
Спосіб вимірювання кутової швидкості та пристрій для його здійснення
Номер патенту: 10840
Опубліковано: 25.12.1996
Автори: Скрипник Юрій Олексійович, Жовнір Микола Федорович, Довгополий Анатолій Степанович, Дубовенко Олександр Валентинович, Скрипник Вікторія Іосиповна
МПК: G01P 9/00
Мітки: спосіб, вимірювання, кутової, швидкості, здійснення, пристрій
Формула / Реферат:
1. Способ измерения угловой скорости, заключающийся в том, что в кольцевом волноводе, вращающемся с угловой скоростью Wх, возбуждают поверхностные акустические волны, преобразуют поверхностные акустические волны в электрический сигнал приемником, механически развязанным с кольцевым волноводом, и определяют угловую скорость по частоте сигнала на выходе приемника, отличающийся тем, что вначале направление распространения поверхностных...
Попередній патент: Спосіб виявлення слідів цифрової обробки аналогових і цифрових сигналограм
Наступний патент: Спосіб отримання активного катодного матеріалу для літієвих акумуляторів
Випадковий патент: Спосіб передсадивної підготовки бульб картоплі