Спосіб вимірювання кутової швидкості, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою
Номер патенту: 61160
Опубліковано: 17.11.2003
Автори: Гаврилюк Володимир Леонідович, Шервашидзе Володимир Варлаамович, Гуменюк Володимир Григорович, Олексієнко Микола Петрович, Леоненко Сергій Миколайович, Васильєв Володимир Леонідович, Шкляр Володимир Петрович
Формула / Реферат
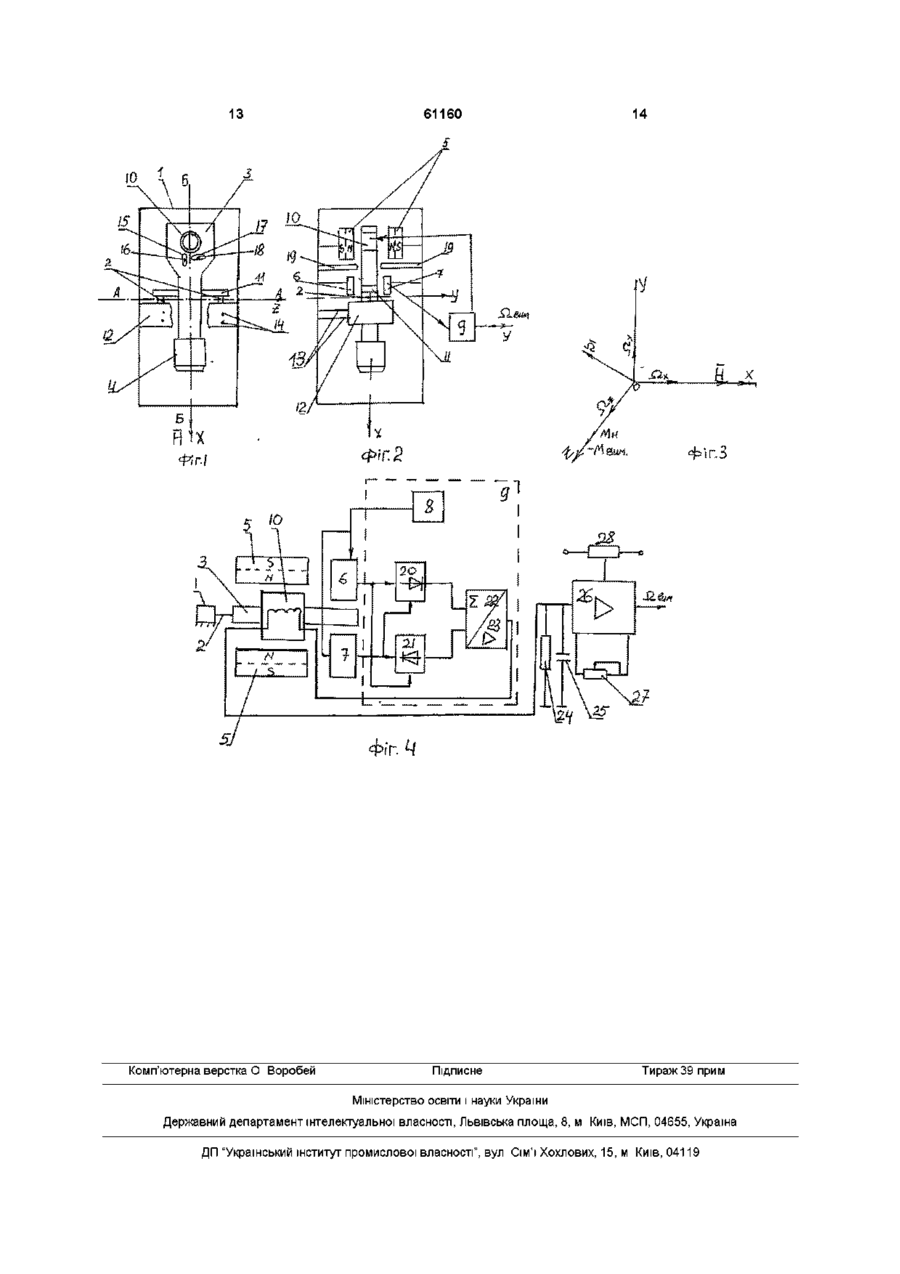
1. Спосіб вимірювання кутової швидкості, за яким визначають переміщення чутливого елемента з гіромотором, який розміщують на об'єкті, кутову швидкість якого виміряють, величину переміщення перетворюють в електричний сигнал, на основі якого формують компенсаційу силу, пропорційну кутовій швидкості вказаного об'єкта, і під впливом якої чутливий елемент повертається у зрівноважене положення, по величині якої визначають величину кутової швидкості, який відрізняється тим, що гіромотор підвішують на чутливому елементі так, що його вісь обертання перпендикулярна до осі, по якій підвіс згинається, та паралельна з віссю симетрії чутливого елемента, який переміщується на гнучкому підвісові в зустрічно направлених полях постійних магнітів.
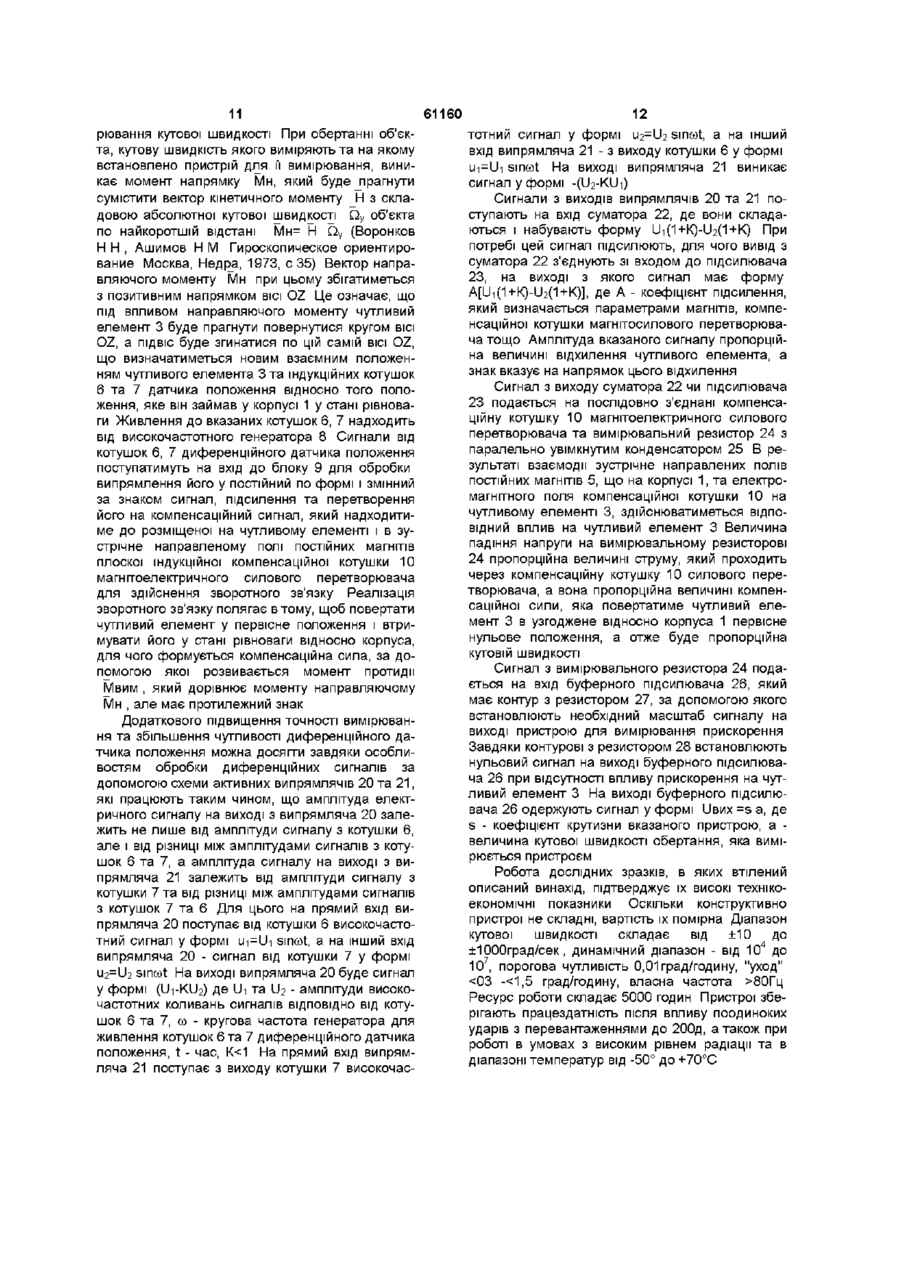
2. Спосіб за п. 1, який відрізняється тим, що формування компенсаційної сили здійснюють шляхом реєстрації переміщення чутливого елемента у двох точках у формі двох високочастотних сигналів u1 = U1 · sin![]() · t та u2 =U2 · sin
· t та u2 =U2 · sin![]() · t, де U1 та U2 - амплітуди високочастотних коливань сигналів відповідно в першій та в другій точках,
· t, де U1 та U2 - амплітуди високочастотних коливань сигналів відповідно в першій та в другій точках, ![]() -кругова частота живлення, a t - час, вказані сигнали перетворюють відповідно у сигнали (U1 -КU2) та -(U2 -КU1 ), де К<1, після чого отримують сумарний сигнал у формі U1 (1+К) – U2 (1+K), в якому амплітуда перетвореного сумарного електричного сигналу пропорційна величині відхилення інерційного елемента, а знак вказує на напрямок відхилення.
-кругова частота живлення, a t - час, вказані сигнали перетворюють відповідно у сигнали (U1 -КU2) та -(U2 -КU1 ), де К<1, після чого отримують сумарний сигнал у формі U1 (1+К) – U2 (1+K), в якому амплітуда перетвореного сумарного електричного сигналу пропорційна величині відхилення інерційного елемента, а знак вказує на напрямок відхилення.
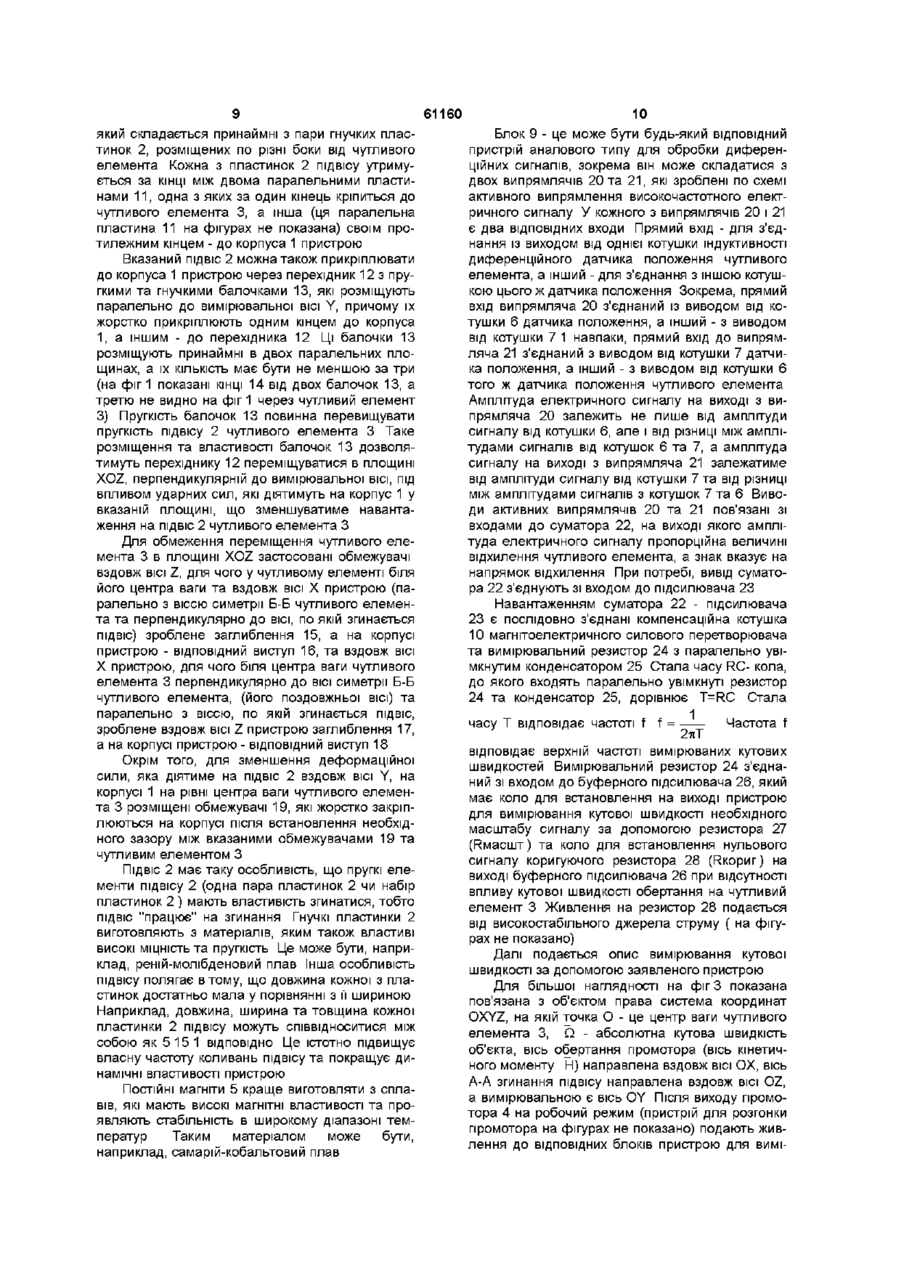
3. Пристрій для вимірювання кутової швидкості, до якого входять розміщений за допомогою пругкого підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку та схема визначення показника кутової швидкості, який відрізняється тим, що чутливий елемент закріплено у корпусі за допомогою гнучкого підвісу, гіромотор встановлено на чутливому елементі так, що вісь його обертання направлена перпендикулярно до осі, по якій згинається підвіс, і паралельна з віссю симетрії чутливого елемента, компенсаційна котушка магнітоелектричного силового перетворювача кола зворотного зв'язку встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів.
4. Пристрій за п. 3, який відрізняється тим, що чутливий елемент закріплено на підвісові, який складається принаймні з пари пругких, гнучких пластинок, розміщених по різні боки від чутливого елемента, кожна з яких закріплена кінцями між двома паралельними пластинами, одна з яких прикріплена до корпуса датчика, а інша своїм протилежним кінцем - до чутливого елемента.
5. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що компенсаційна котушка магнітоелектричного силового перетворювача розміщена на чутливому елементі у заглибленні так, що вона знаходиться на одному рівні із зовнішньою поверхнею чутливого елемента.
6. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що підвіс виготовлено з міцного та пругкого матеріалу, зокрема з реній-молібденового плаву.
7.Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що чутливий елемент виготовлено з струмопровідного матеріалу.
8. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що плоскі постійні магніти виготовлені з матеріалу з високими магнітними властивостями, стабільними в широкому діапазоні температур, зокрема з самарій-кобальтового плаву.
9. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що датчик положення розміщено на рівні вільного кінця чутливого елемента.
10. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що коло зворотного зв'язку містить два активні випрямлячі, кожен з яких має два відповідних входи, причому прямий вхід першого випрямляча з'єднаний із виводом від першої котушки індуктивності диференційного датчика положення чутливого елемента, а інший вхід першого випрямляча з'єднаний із виводом від другої котушки вказаного датчика положення, прямий вхід другого випрямляча з'єднаний з виводом від другої котушки індуктивності, а інший вхід другого випрямляча з'єднаний із виводом від першої котушки індуктивності диференційного датчика положення, виводи від вказаних випрямлювачів з'єднані із відповідними входами суматора.
11. Пристрій за будь - яким з попередніх пунктів, який відрізняється тим, що до схеми визначення показника кутової швидкості входять вимірювальний резистор, з'єднаний із входом до буферного підсилювача, який має коло для встановлення необхідного масштабу сигналу на виході пристрою та коло для встановлення нульового сигналу на виході буферного підсилювача при відсутності впливу на чутливий елемент.
12. Пристрій за будь - яким з попередніх пунктів, який відрізняється тим, що вказаний підвіс прикріплено до корпуса пристрою через перехідник з принаймні трьома пругкими балочками, розміщеними принаймні в двох паралельних з вимірювальною віссю пристрою площинах, протилежні кінці яких жорстко защемлені на корпусі та на перехіднику, причому пругкість балочок перевищує пругкість підвісу чутливого елемента.
13. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що на корпусі пристрою паралельно з вимірювальною віссю на рівні центра ваги чутливого елемента розміщені обмежувачі.
14. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що у чутливому елементі вздовж його осі симетрії та перпендикулярно до осі, по якій згинається підвіс, виконане заглиблення, а на корпусі пристрою - відповідний виступ.
15. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що у чутливому елементі вздовж осі, по якій згинається підвіс, та перпендикулярно до осі симетрії чутливого елемента, виконане заглиблення, а на корпусі пристрою- відповідний виступ.
16. Блок обробки диференційних сигналів, який містить випрямляч та суматор, який відрізняється тим , що має два випрямлячі, кожен з яких має два входи для диференційних сигналів, прямий вхід першого випрямляча призначений для з'єднання з виводом від першого датчика диференційних сигналів, а інший вхід першого випрямляча - для з'єднання з виводом від другого датчика диференційних сигналів, прямий вхід другого випрямляча призначений для з'єднання із виводом від другого датчика диференційних сигналів, а інший вхід другого випрямляча призначений для з'єднання із виводом від першого датчика диференційних сигналів, виводи від першого та другого випрямлячів з'єднані із входами суматора.
17.Блок за п. 16, який відрізняється тим, що вихід суматора з'єднаний з підсилювачем.
Текст
1 Спосіб вимірювання кутової швидкості, за яким визначають переміщення чутливого елемента з промотором, який розміщують на об'єкті, кутову швидкість якого виміряють, величину переміщення перетворюють в електричний сигнал, на основі якого формують компенсаційу силу, пропорційну кутовій швидкості вказаного об'єкта, і під впливом якої чутливий елемент повертається у зрівноважене положення, по величині якої визначають величину кутової швидкості, який відрізняється тим, що промотор підвішують на чутливому елементі так, що його вісь обертання перпендикулярна до осі, по якій ПІДВІС згинається, та паралельна з віссю симетрії чутливого елемента, який переміщується на гнучкому ПІДВІСОВІ В зустрічно направлених полях постійних магнітів 2 Спосіб за п 1, який відрізняється тим, що формування компенсаційної сили здійснюють шляхом реєстрації переміщення чутливого елемента у двох точках у формі двох високочастотних сигналів ui = Ui smCO tTau2=U2 smCO t, д е і і - і т а і і г амплітуди високочастотних коливань сигналів ВІДПОВІДНО в першій та в другій точках, СО-кругова частота живлення, a t - час, вказані сигнали перетворюють ВІДПОВІДНО у сигнали (Ui -KU2) та -(ІІ2 KUi ), де К
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for measuring angular velosity; differential signal processor for the device
Автори англійськоюLeonenko Serhii Mykolaiovych
Назва патенту російськоюСпособ и устройство для измерения угловой скорости; процессор разностного сигнала для устройства
Автори російськоюЛеоненко Сергей Николаевич
МПК / Мітки
Мітки: вимірювання, здійснення, обробки, сигналів, блок, пристрою, диференційних, швидкості, кутової, пристрій, спосіб
Код посилання
<a href="https://ua.patents.su/7-61160-sposib-vimiryuvannya-kutovo-shvidkosti-pristrijj-dlya-jjogo-zdijjsnennya-ta-blok-obrobki-diferencijjnikh-signaliv-dlya-pristroyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання кутової швидкості, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою</a>
Спосіб вимірювання прискорення, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою
Номер патенту: 61159
Опубліковано: 17.11.2003
Автори: Шервашидзе Володимир Варлаамович, Гаврилюк Володимир Леонідович, Шкляр Володимир Петрович, Гуменюк Володимир Григорович, Васильєв Володимир Леонідович, Олексієнко Микола Петрович, Леоненко Сергій Миколайович
МПК: G01P 15/13, G01P 15/00
Мітки: обробки, пристрій, прискорення, блок, спосіб, диференційних, вимірювання, пристрою, здійснення, сигналів
Формула / Реферат:
1. Спосіб вимірювання прискорення, за яким визначають переміщення інерційного елемента, який розміщують на об'єкті, прискорення якого підлягає вимірюванню, величину переміщення інерційного елемента перетворюють в електричний сигнал, на основі якого шляхом взаємодії його магнітного поля з полем постійного магніта, в якому інерційний елемент під впливом прискорення відхиляється від свого зрівноваженого положення, формують відповідну...
Спосіб вимірювання кутової швидкості та пристрій для його здійснення
Номер патенту: 10897
Опубліковано: 25.12.1996
Автори: Ільєнко Анатолій Миколайович, Довгополий Анатолій Степанович, Фадєєв Олексій Валерієвич, Скрипник Юрій Олексійович
МПК: G01C 19/64
Мітки: пристрій, вимірювання, спосіб, швидкості, здійснення, кутової
Формула / Реферат:
(57) 1. Способ измерения угловой скорости, включающий разделение оптического монохроматического когерентного излучения на две волны, распространение их в катушке волоконного световода во встречных направлениях, сдвиг частоты одной из волн до ее вхождения в катушку волоконного световода, а частота другой волны - после прохождения ею катушки волоконного световода, совмещение встречно распространяющихся волн, образующих интерференционную...
Спосіб вимірювання кутової швидкості і пристрій для його здійснення
Номер патенту: 22597
Опубліковано: 17.03.1998
Автори: Ільєнко Анатолій Миколайович, Скрипник Юрій Олексійович
МПК: G01C 19/64
Мітки: кутової, пристрій, здійснення, спосіб, швидкості, вимірювання
Формула / Реферат:
1. Способ измерения угловой скорости, включающий разделение оптического излучения на две волны, распространяющиеся в катушке волоконного световода во встречных направлениях, сдвиг частоты одной из волн до ее вхождения в катушку волоконного световода, а частоту другой волны сдвигают на то же значение после прохождения ею катушки волоконного световода, совмещение встречно распространяющихся волн, образующих интерференционную картину,...
Спосіб вимірювання кутової швидкості та пристрій для його здійснення
Номер патенту: 10840
Опубліковано: 25.12.1996
Автори: Скрипник Вікторія Іосиповна, Жовнір Микола Федорович, Скрипник Юрій Олексійович, Дубовенко Олександр Валентинович, Довгополий Анатолій Степанович
МПК: G01P 9/00
Мітки: вимірювання, спосіб, кутової, пристрій, здійснення, швидкості
Формула / Реферат:
1. Способ измерения угловой скорости, заключающийся в том, что в кольцевом волноводе, вращающемся с угловой скоростью Wх, возбуждают поверхностные акустические волны, преобразуют поверхностные акустические волны в электрический сигнал приемником, механически развязанным с кольцевым волноводом, и определяют угловую скорость по частоте сигнала на выходе приемника, отличающийся тем, что вначале направление распространения поверхностных...
Спосіб автоматичного регулювання кутової швидкості та пристрій для його здійснення
Номер патенту: 34183
Опубліковано: 15.02.2001
Автор: Ключковський Сергій Миронович
МПК: G05D 13/00
Мітки: пристрій, здійснення, швидкості, автоматичного, регулювання, кутової, спосіб
Текст:
...і сили акумулятора, то при зміні однієї з них, а саме - відцентрової сили, рівновага порушується і ланки здійснюють рух, змінюючи при цьому динамічний момент інерції системи. Наслідком зміни останнього є виникнення на валу крутного моменту, який запобігає подальшому відхиленню швидкості. Таким чином, відбувається автоматична зміна потоку рушійної енергії в регульованій системі, джерелом якої є акумулятор механічної енергії. Пристрій для...
Попередній патент: Спосіб вимірювання прискорення, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою
Наступний патент: Балон
Випадковий патент: Пристрій для стерилізації зубних щіток