Датчик

Формула / Реферат
Датчик, що містить постійний магніт, який відрізняється тим, що як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійного магніту та з'єднаних за градієнтною схемою.
Текст
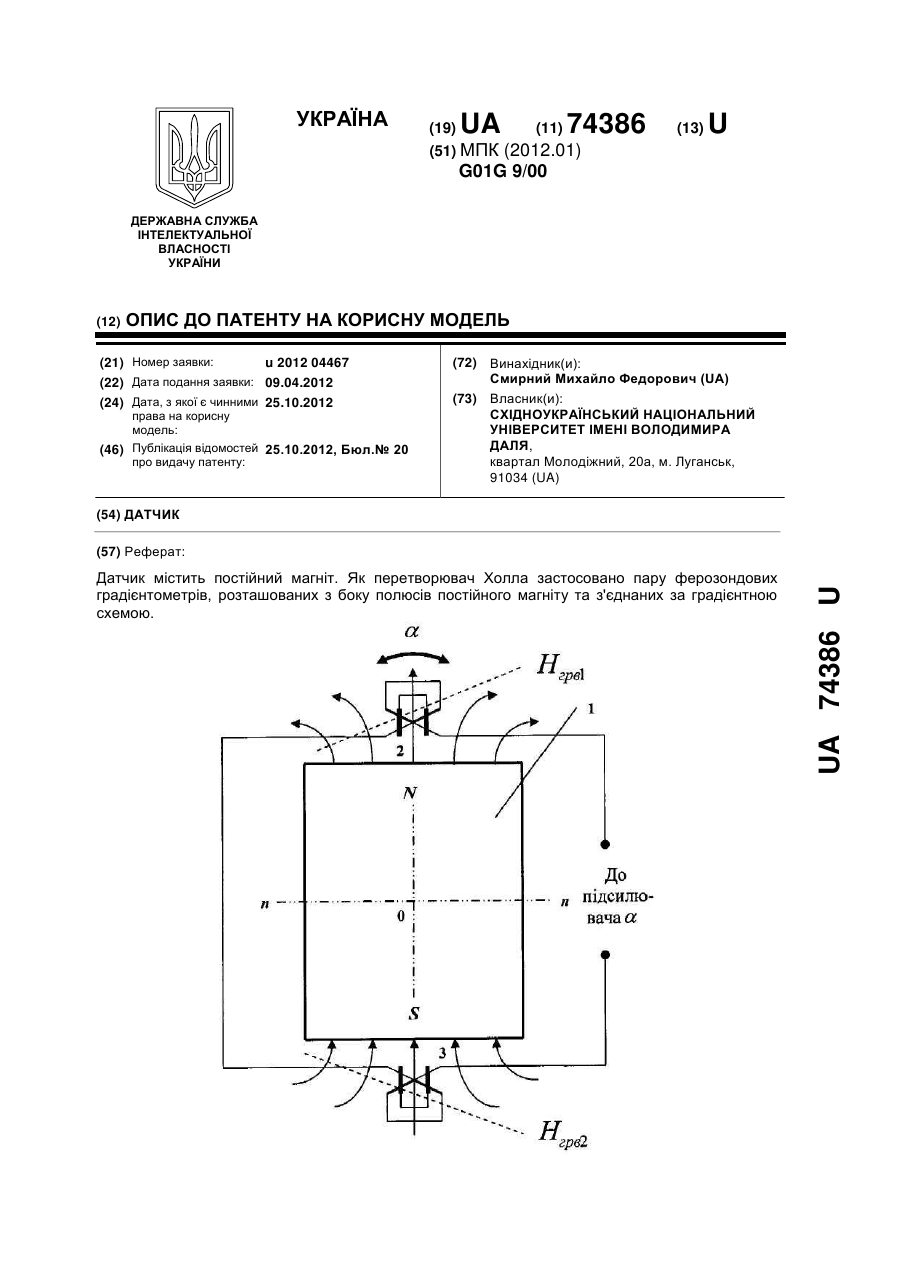
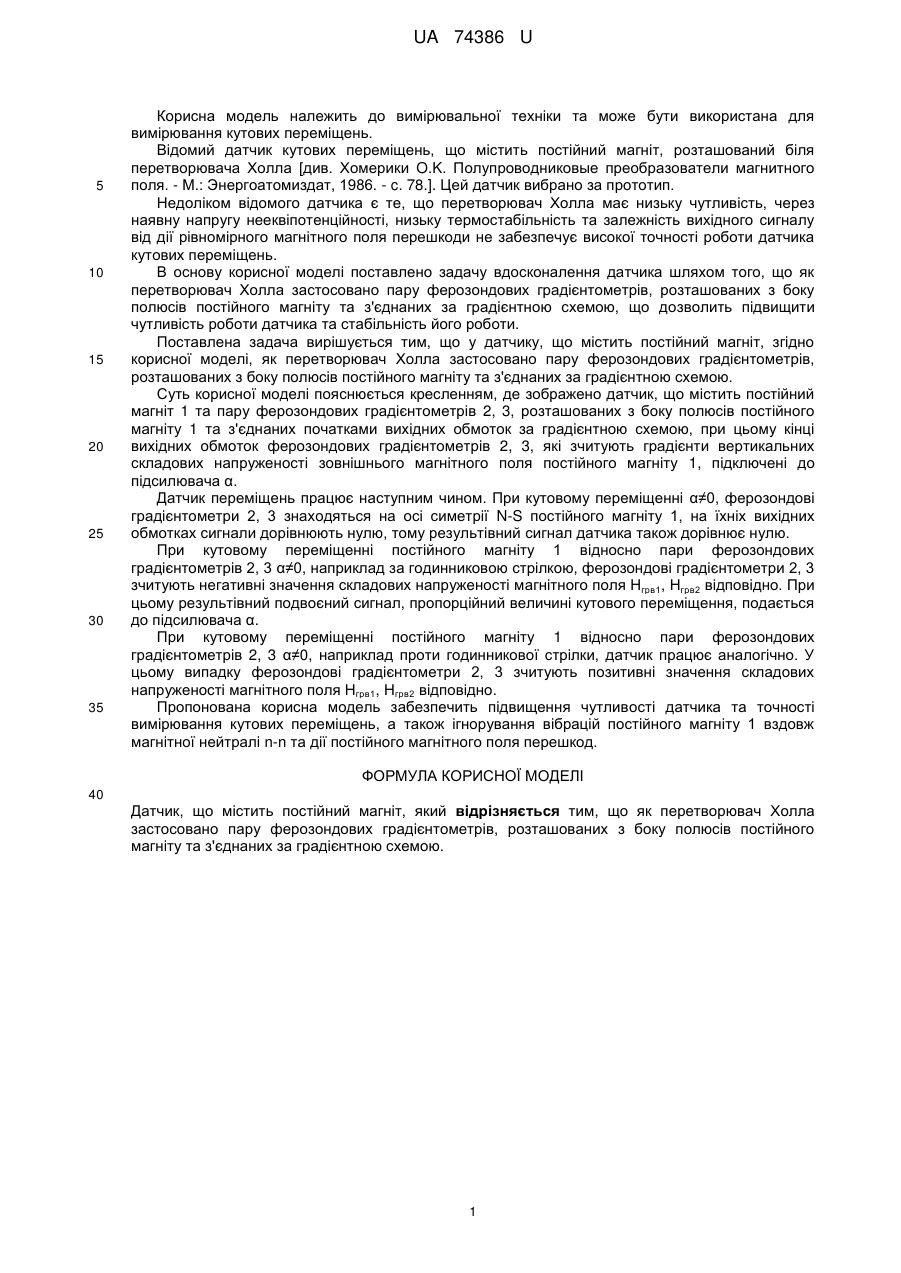
Реферат: UA 74386 U UA 74386 U 5 10 15 20 25 30 35 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання кутових переміщень. Відомий датчик кутових переміщень, що містить постійний магніт, розташований біля перетворювача Холла [див. Хомерики O.K. Полупроводниковые преобразователи магнитного поля. - М.: Энергоатомиздат, 1986. - c. 78.]. Цей датчик вибрано за прототип. Недоліком відомого датчика є те, що перетворювач Холла має низьку чутливість, через наявну напругу нееквіпотенційності, низьку термостабільність та залежність вихідного сигналу від дії рівномірного магнітного поля перешкоди не забезпечує високої точності роботи датчика кутових переміщень. В основу корисної моделі поставлено задачу вдосконалення датчика шляхом того, що як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійного магніту та з'єднаних за градієнтною схемою, що дозволить підвищити чутливість роботи датчика та стабільність його роботи. Поставлена задача вирішується тим, що у датчику, що містить постійний магніт, згідно корисної моделі, як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійного магніту та з'єднаних за градієнтною схемою. Суть корисної моделі пояснюється кресленням, де зображено датчик, що містить постійний магніт 1 та пару ферозондових градієнтометрів 2, 3, розташованих з боку полюсів постійного магніту 1 та з'єднаних початками вихідних обмоток за градієнтною схемою, при цьому кінці вихідних обмоток ферозондових градієнтометрів 2, 3, які зчитують градієнти вертикальних складових напруженості зовнішнього магнітного поля постійного магніту 1, підключені до підсилювача α. Датчик переміщень працює наступним чином. При кутовому переміщенні α≠0, ферозондові градієнтометри 2, 3 знаходяться на осі симетрії N-S постійного магніту 1, на їхніх вихідних обмотках сигнали дорівнюють нулю, тому результівний сигнал датчика також дорівнює нулю. При кутовому переміщенні постійного магніту 1 відносно пари ферозондових градієнтометрів 2, 3 α≠0, наприклад за годинниковою стрілкою, ферозондові градієнтометри 2, 3 зчитують негативні значення складових напруженості магнітного поля Нгрв1, Нгрв2 відповідно. При цьому результівний подвоєний сигнал, пропорційний величині кутового переміщення, подається до підсилювача α. При кутовому переміщенні постійного магніту 1 відносно пари ферозондових градієнтометрів 2, 3 α≠0, наприклад проти годинникової стрілки, датчик працює аналогічно. У цьому випадку ферозондові градієнтометри 2, 3 зчитують позитивні значення складових напруженості магнітного поля Нгрв1, Нгрв2 відповідно. Пропонована корисна модель забезпечить підвищення чутливості датчика та точності вимірювання кутових переміщень, а також ігнорування вібрацій постійного магніту 1 вздовж магнітної нейтралі n-n та дії постійного магнітного поля перешкод. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 Датчик, що містить постійний магніт, який відрізняється тим, що як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійного магніту та з'єднаних за градієнтною схемою. 1 UA 74386 U Комп’ютерна верстка M. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюSensor
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюДатчик
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: датчик
Код посилання
<a href="https://ua.patents.su/4-74386-datchik.html" target="_blank" rel="follow" title="База патентів України">Датчик</a>
Датчик
Номер патенту: 70986
Опубліковано: 25.06.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
Датчик, що містить постійний магніт, який відрізняється тим, що застосовано додатковий постійний магніт, розміщений з боку від основного постійного магніту та з'єднаний з ним немагнітними перемичками, а як перетворювач Холла застосовано пару ферозондів, розташованих між постійними магнітами один від одного на відстані, що дорівнює половині довжини постійного магніту, при цьому вихідні обмотки ферозондів увімкнені за диференціальною...
Датчик переміщень
Номер патенту: 68527
Опубліковано: 26.03.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: переміщень, датчик
Формула / Реферат:
Датчик переміщень, що містить С-подібний постійний магніт, який відрізняється тим, що як два датчики Холла застосовано два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від його центру на відстані, що дорівнює половині ширини полюсу постійного магніту, при цьому вихідні обмотки ферозондів з'єднані послідовно зустрічно.
Датчик

Номер патенту: 68944
Опубліковано: 10.04.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
Датчик, що містить С-подібний постійний магніт, який відрізняється тим, що як два перетворювачі Холла застосовано два ферозонди, розташовані в міжполюсному зазорі постійного магніту та зміщені один відносно одного вздовж осі магнітної нейтралі на відстані, що дорівнює трьом чвертям ширини міжполюсного зазору, при цьому вихідні обмотки ферозондів з'єднані послідовно узгоджено.
Датчик переміщень
Номер патенту: 73860
Опубліковано: 10.10.2012
Автор: Смірний Михайло Федорович
МПК: G01D 9/00
Мітки: переміщень, датчик
Формула / Реферат:
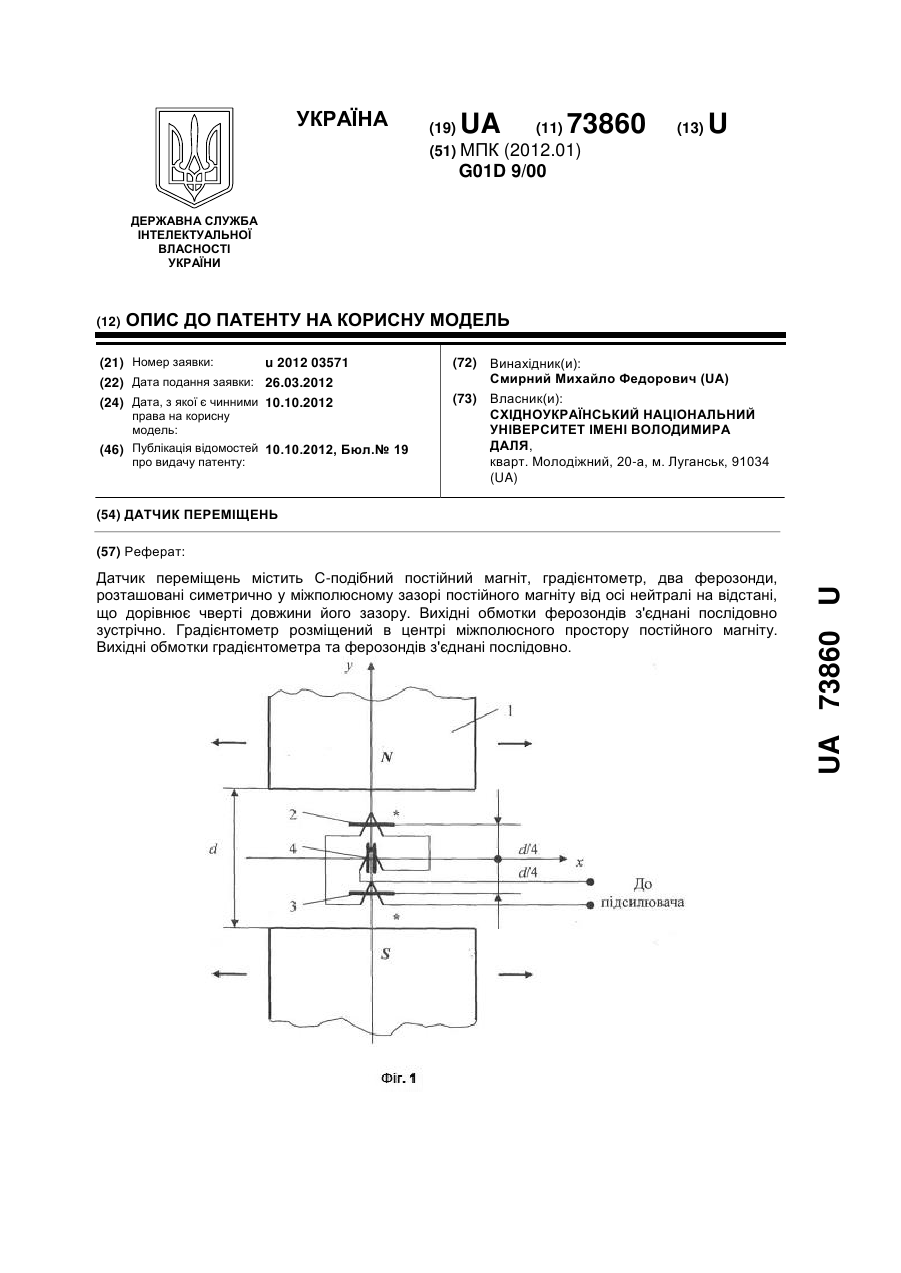
Датчик переміщень, що містить С-подібний постійний магніт, два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від осі нейтралі на відстані, що дорівнює чверті довжини його зазору, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно, який відрізняється тим, що додатково містить градієнтометр, розміщений в центрі міжполюсного простору постійного магніту, причому вихідні обмотки градієнтометра та...
Датчик переміщень
Номер патенту: 64735
Опубліковано: 10.11.2011
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик, переміщень
Формула / Реферат:
Датчик переміщень, що містить С-подібний постійний магніт, який відрізняється тим, що як два датчики Холла застосовано два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від осі нейтралі на відстані, що дорівнює чверті довжини його зазору, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно.