Механізм перетворення зворотно-поступального руху у переміщення робочого органу


Формула / Реферат
Механізм перетворення зворотно-поступального руху у переміщення робочого органу, що складається із системи блоків з канатами, який відрізняється тим, що блоки різного діаметра поєднані один з одним і які обгинають канатами, що приєднані до блоків, при цьому один із блоків з'єднано з платформою, яка на боці має шарнір, а на іншому боці платформи закріплено канат, який через багатоступінчасту систему блоків з'єднує платформу з робочим органом.
Текст
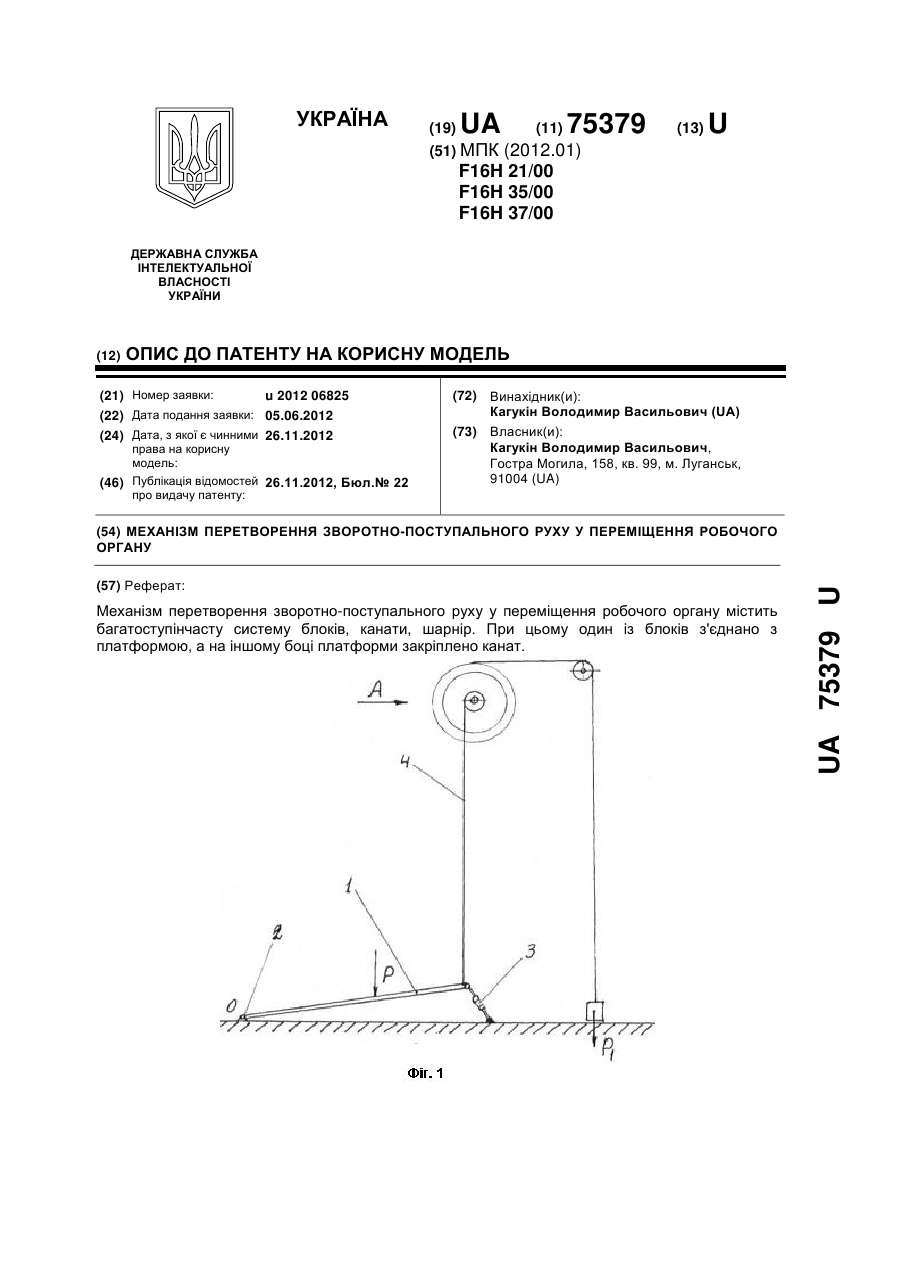
Реферат: Механізм перетворення зворотно-поступального руху у переміщення робочого органу містить багатоступінчасту систему блоків, канати, шарнір. При цьому один із блоків з'єднано з платформою, а на іншому боці платформи закріплено канат. UA 75379 U (54) МЕХАНІЗМ ПЕРЕТВОРЕННЯ ЗВОРОТНО-ПОСТУПАЛЬНОГО РУХУ У ПЕРЕМІЩЕННЯ РОБОЧОГО ОРГАНУ UA 75379 U UA 75379 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до механізмів, що застосовуються як у промисловості, так і у побутових пристроях, вузлах і таке інше, де необхідне перетворення зворотно-поступального руху у переміщення виконавчого органу, який підіймає вантажі або виконує інші рухи. Можливо застосовувати такий механізм у схемах автоматики для переміщення або зміни напряму дії виконавчих органів. Відомий механізм перетворення зворотно-поступального руху в обертальний, що містить корпус, в якому розташовано колінвал, пару коромисел, кінцями шарнірно зв'язаних з одного боку з колінвалом, а з другого боку - кінцями з корпусом [див. опис до деклараційного патенту на корисну модель України № 2232 МПК 7 F16H 21/00, 2003]. Недоліком конструкції механізму є неможливість зворотно-поступального руху у переміщення робочого органу. Таке перетворення потрібно не тільки в схемах автоматизації, а і у побутових механізмах, наприклад при підйомі вантажів або при переміщенні виконавчого органу, який здійснює рух інших предметів. Відомий блок, як деталь у вигляді колеса із жолобом по колу, який використовують у машинах і механізмах для зміни напряму дії сили (нерухомий блок) або для виграшу у силі відстані (рухомий блок) [див. Советский энциклопедический словарь. - М.: Советская энциклопедия, 1985. - С. 146]. Блоки, які обгинаються канатом, утворюють поліспаст, тобто систему рухомих і нерухомих блоків. Такий вантажний пристрій дозволяє отримати виграш у силі, а втрату - у відстані. Загаданий блок неможливо використовувати в системах автоматики або для зміни напряму, сили і відстані пересування виконавчого органу в пропонованому механізмі для переміщення вантажів на будівництві. Найближчим аналогом до пропонованого механізму є відома система блоків, тобто поліспаст, який має рухомий і нерухомий блоки, що поєднані і обгорнуті між собою канатами [див. Советский энциклопедический словарь. - М.: Советская энциклопедия, 1985. - С. 146]. Але згаданий механізм неможливо використовувати для надання дії його без приводного механізму або лебідки, а також неможливо перетворення зворотно-поступального руху у переміщення виконавчого органу. Задача, яка вирішується пропонованим механізмом, полягає в створенні нової конструкції пристрою, що утворений із окремих блоків, які обгинають канатами, які отримують переміщення від зворотно-поступального руху похилої платформи. Поставлена задача вирішується тим, що механізм має похилу платформу, яка з одного боку має шарнір, а з другого боку під платформою установлено демпфер, який уповільнює швидкий рух. До краю платформи зачеплений канат, який обгинає один із декількох блоків, що розташовані на одній осі та нерухомо з'єднані між собою. Блоки мають підшипники кулькові або ковзання, а також мають різні діаметри і поєднані один з одним. Можливо виготовляти блоки з однієї заготовки для невеликих розмірів блоків, тобто як одне тіло. До блоків приєднані гнучкі органи тобто канат, який передає рух від платформи до одного з блоків, а до кожного поряд розташованого блока приєднані гнучкі органи, які передають рух на робочий орган. Таких блоків, що розташовані на одній осі, можливо розмістити два, три і більше. Для пояснення конструкції та роботи пропонованого механізму наведені креслення, де: - на фіг. 1 зображено загальну схему механізму; - на фіг. 2 - система блоків, вигляд збоку, за стрілкою А. Механізм перетворення руху складається із похилої платформи 1, яку розташовано на шарнірі 2, а другий бік платформи упирається в шток демпфера 3. До кінця платформи 1 приєднано канат 4, який нерухомо прикріплено до блока 5. Блок 5 нерухомо поєднаний з блоками 6, 7, які розташовані на валу 8. Блоки 5, 6, 7 і їх може бути більше, утворюють багатоступінчасту систему блоків, які нерухомі між собою, але одночасно обертаються навколо осі на валу 8. Вал 8 обертається на підшипниках ковзання або кочення. Блоки 5, 7 різного діаметра і до кожного приєднаний канат, який передає рух на переміщення вантажу або виконання інших команд. Коли на похилу платформу 1 діє сила Р, наприклад автомашина, платформа повертається навколо шарніра 2, а канат, що зачеплений за другий кінець платформи повертає блок 6. При цьому демпфер 3 зм'якшує рух платформи 1. Діаметр блока 5 менше інших блоків у декілька разів, тому блоки 6 і 7 будуть передавати через канат на виконавчий орган з більшою швидкістю і меншим зусиллям. Це дозволяє використати зайву енергію на потрібну і необхідну роботу. 1 UA 75379 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Механізм перетворення зворотно-поступального руху у переміщення робочого органу, що складається із системи блоків з канатами, який відрізняється тим, що блоки різного діаметра поєднані один з одним і які обгинаються канатами, що приєднані до блоків, при цьому один із блоків з'єднано з платформою, яка на боці має шарнір, а на іншому боці платформи закріплено канат, який через багатоступінчасту систему блоків з'єднує платформу з робочим органом. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanism for transformation of reciprocating motion to displacement of working member
Автори англійськоюKahukin Volodymyr Vasyliovych
Назва патенту російськоюМеханизм преобразования возвратно-поступательного движения в перемещение рабочего органа
Автори російськоюКагукин Владимир Васильевич
МПК / Мітки
МПК: F16H 35/00, F16H 21/00, F16H 37/00
Мітки: робочого, зворотно-поступального, органу, механізм, перетворення, переміщення, руху
Код посилання
<a href="https://ua.patents.su/4-75379-mekhanizm-peretvorennya-zvorotno-postupalnogo-rukhu-u-peremishhennya-robochogo-organu.html" target="_blank" rel="follow" title="База патентів України">Механізм перетворення зворотно-поступального руху у переміщення робочого органу</a>
Механізм для перетворення зворотно-поступального руху в обертальний і навпаки
Номер патенту: 3457
Опубліковано: 15.11.2004
Автор: Мущинський Анатолій Климович
МПК: F16H 21/16
Мітки: руху, обертальний, перетворення, зворотно-поступального, механізм, навпаки
Формула / Реферат:
1. Механізм для перетворення зворотно-поступального руху в обертальний і навпаки, що складається з поршня, шатуна і колінчастого вала, який відрізняється тим, що кривошип виконаний у вигляді планетарної передачі, яка складається з епіциклічної еліпсоїдної і внутрішньої шестерень із шевронними зубами, що знаходяться в постійному зачепленні.2. Механізм за п. 1, який відрізняється тим, що колінчастий вал виконаний простим і прямим,...
Пристрій перетворення зворотно-поступального руху у зворотно-обертальний
Номер патенту: 70915
Опубліковано: 25.06.2012
Автори: Руткевич Володимир Степанович, Дусанюк Віктор Аркадійович
МПК: F15B 15/06
Мітки: зворотно-обертальний, зворотно-поступального, руху, перетворення, пристрій
Формула / Реферат:
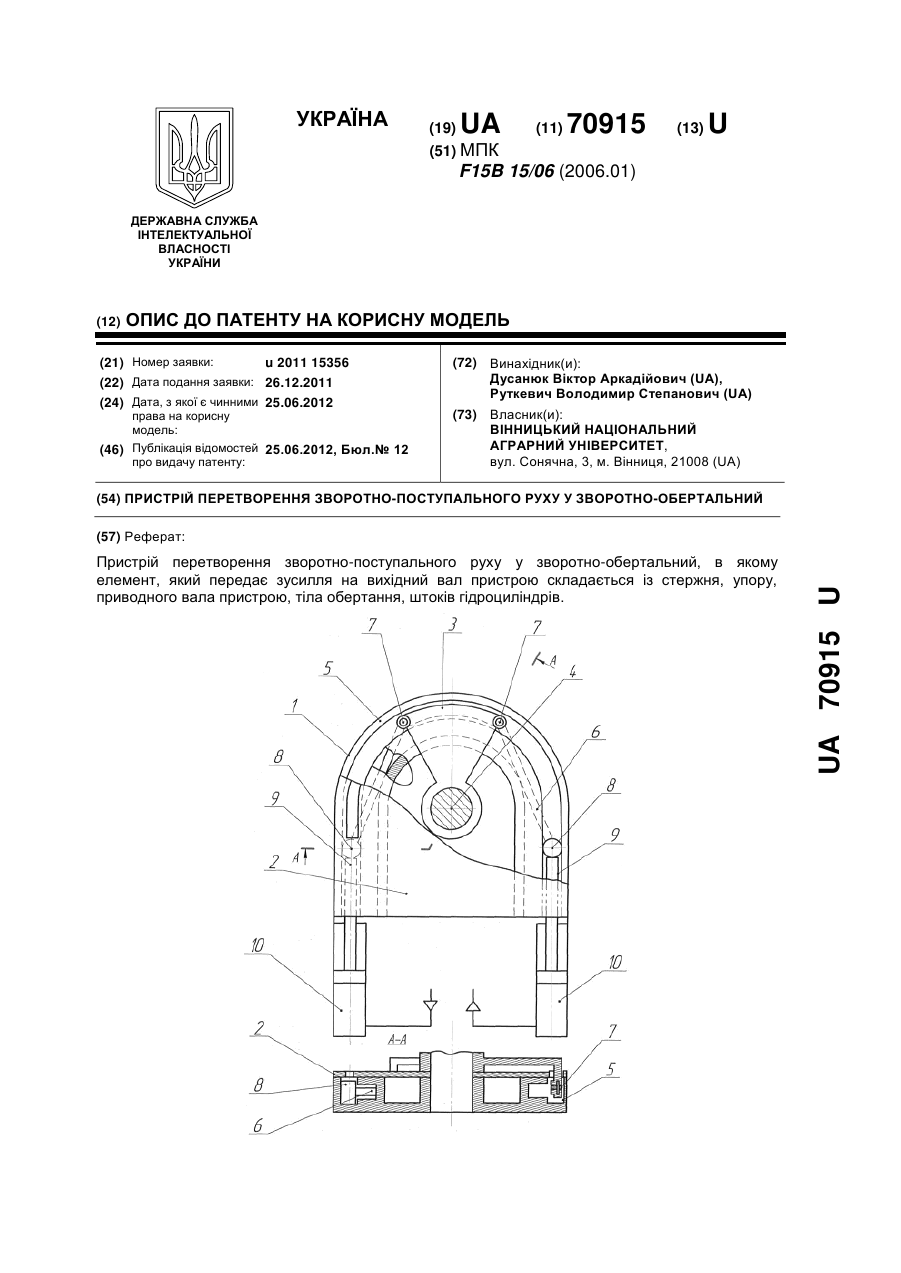
Пристрій перетворення зворотно-поступального руху у зворотно-обертальний, який відрізняється тим, що елемент, який передає зусилля на вихідний вал пристрою складається із стержня, один кінець якого шарнірно, з допомогою осі, з'єднаний з упором, що передає крутний момент на приводний вал пристрою, а другий - з тілом обертання, що взаємодіє з вихідними елементами (штоками) гідроциліндрів.
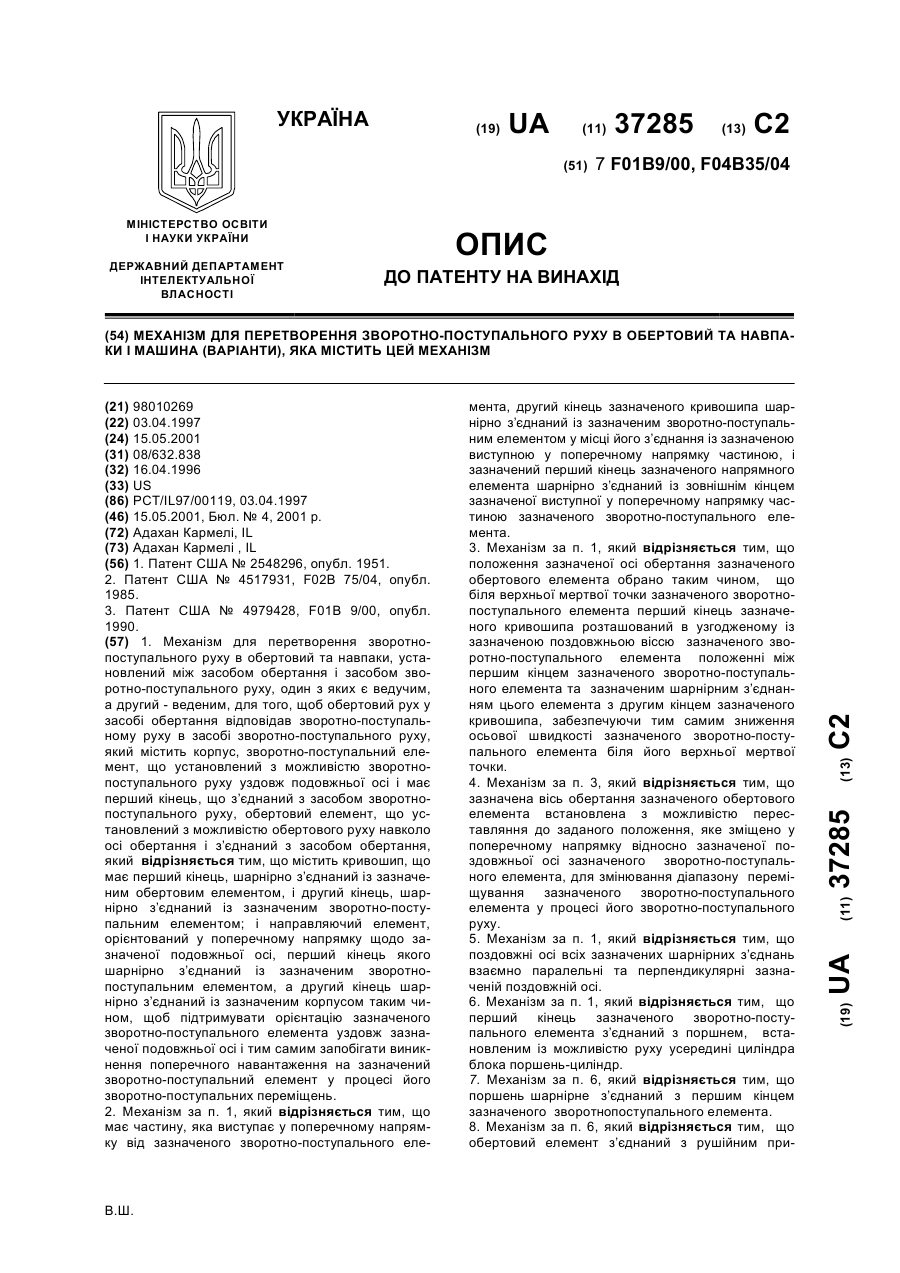
Механізм для перетворення зворотно-поступального руху в обертовий та навпаки і машина(варіанти), яка містить цей механізм
Номер патенту: 37285
Опубліковано: 15.05.2001
Автор: Адахан Кармелі
МПК: F04B 35/00, F01B 9/00
Мітки: зворотно-поступального, обертовий, машина(варіанти, механізм, навпаки, містить, яка, руху, перетворення
Формула / Реферат:
1. Механізм для перетворення зворотно-поступального руху в обертовий та навпаки, установлений між засобом обертання і засобом зворотно-поступального руху, один з яких є ведучим, а другий видимим, для того, щоб обертовий рух у засобі обертання відповідав зворотно-поступальному руху в засобі зворотно - поступального руху, який містить корпус» зворотно-поступальний елемент, що установлений з можливістю зворотно-поступального руху уздовж...
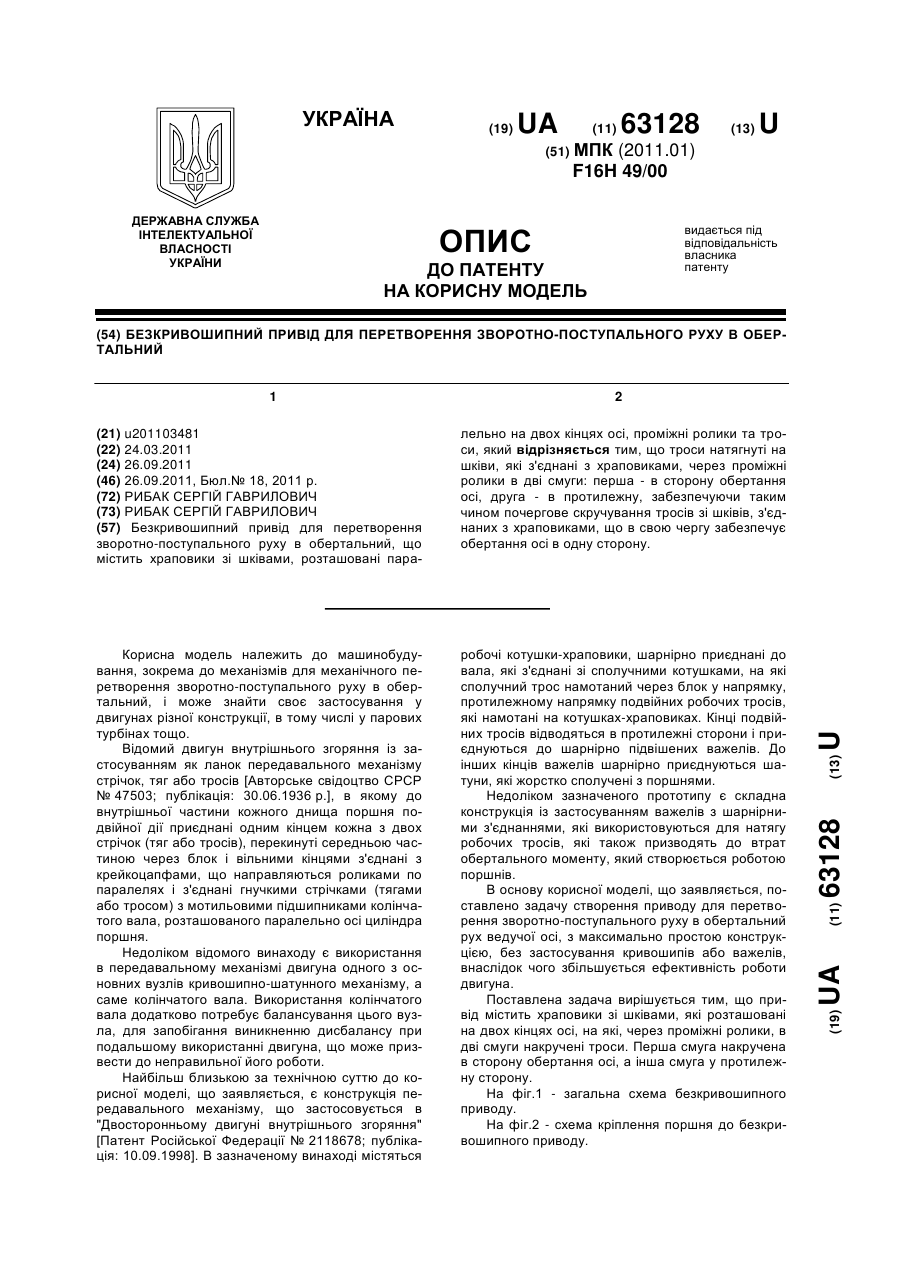
Безкривошипний привід для перетворення зворотно-поступального руху в обертальний
Номер патенту: 63128
Опубліковано: 26.09.2011
Автор: Рибак Сергій Гаврилович
МПК: F16H 49/00
Мітки: руху, привід, перетворення, безкривошипний, зворотно-поступального, обертальний
Формула / Реферат:
Безкривошипний привід для перетворення зворотно-поступального руху в обертальний, що містить храповики зі шківами, розташовані паралельно на двох кінцях осі, проміжні ролики та троси, який відрізняється тим, що троси натягнуті на шківи, які з'єднані з храповиками, через проміжні ролики в дві смуги: перша - в сторону обертання осі, друга - в протилежну, забезпечуючи таким чином почергове скручування тросів зі шківів, з'єднаних з храповиками,...
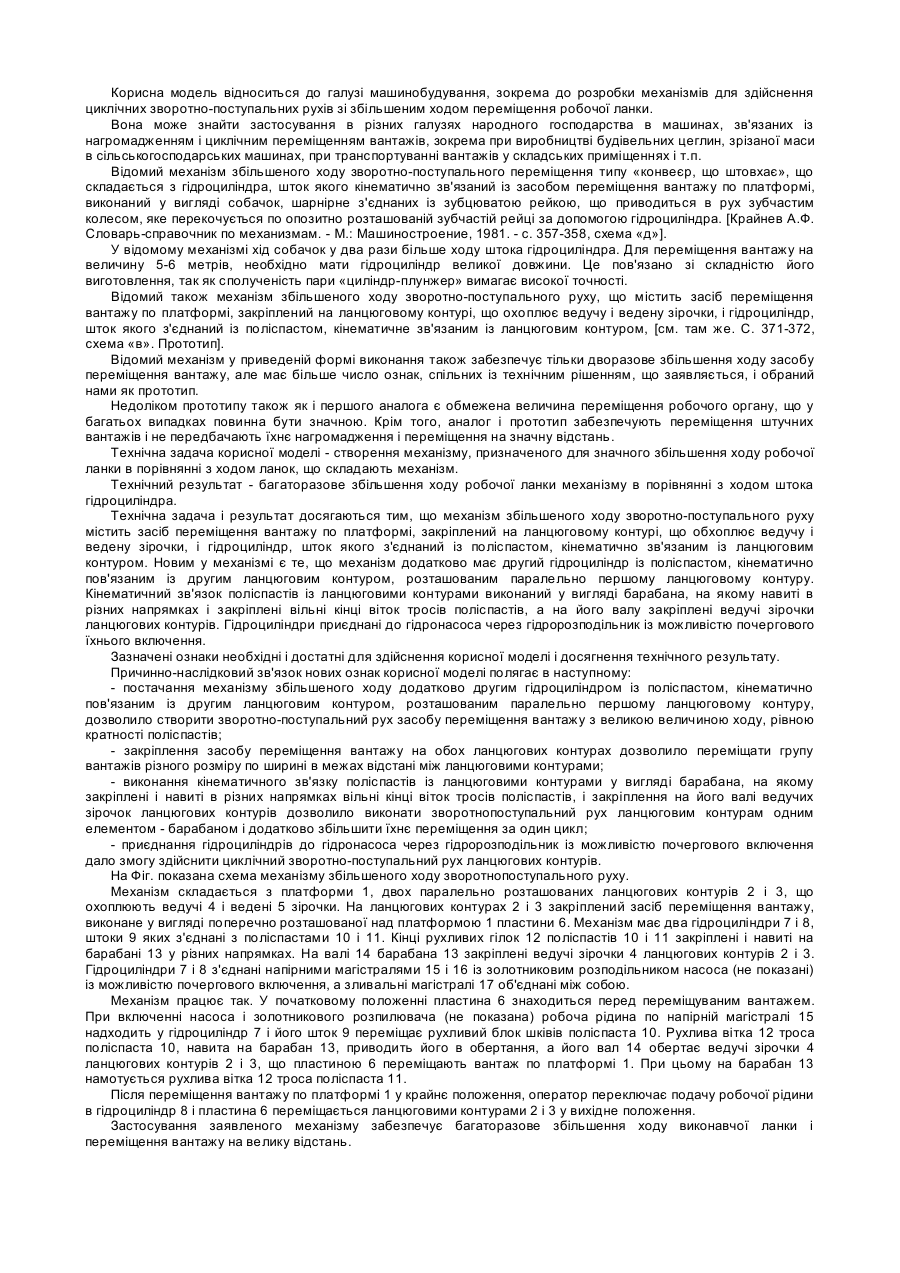
Механізм збільшеного ходу зворотно-поступального руху
Номер патенту: 22468
Опубліковано: 25.04.2007
Автори: Хабрат Микола Іванович, Марковська Оксана Євгенівна
МПК: F16H 27/00
Мітки: руху, ходу, механізм, збільшеного, зворотно-поступального
Формула / Реферат:
Механізм збільшеного ходу зворотно-поступального руху, що містить засіб переміщення вантажу по платформі, закріплений на ланцюговому контурі, що охоплює ведучу і ведену зірочки і гідроциліндр, шток якого з'єднаний із поліспастом, зв'язаним із ланцюговим контуром, який відрізняється тим, що механізм збільшеного ходу додатково має другий гідроциліндр із поліспастом, кінематично зв'язаним із другим ланцюговим контуром, розташованим паралельно...
Попередній патент: Технологія виробництва ферментованих грибів глива звичайна
Наступний патент: Спосіб прогнозування перебігу віл-інфекції
Випадковий патент: Спосіб виготовлення гнутих профілів з поздовжніми криволінійними гофрами