Пристрій для стабілізації зображення в оптико-телевізійному прицілі
Номер патенту: 75652
Опубліковано: 15.05.2006
Формула / Реферат
Пристрій для стабілізації зображення в оптико-телевізійному прицілі, що містить телевізійну камеру, монітор, гіроскоп з датчиками кута по вертикалі і горизонталі, систему повороту візирної осі телевізійної камери з двигуном приводу по вертикалі і диференціальним підсилювачем, перший вхід якого підключений до датчика кута по вертикалі гіроскопа, другий його вхід підключений до датчика кутового положення візирної осі телекамери по вертикалі, а вихід диференціального підсилювача через підсилювач потужності підключений до двигуна приводу телевізійної камери по вертикалі, також містить систему повороту візирної осі телевізійної камери по горизонталі з диференціальним підсилювачем, перший вхід якого підключений до датчика кута по горизонталі гіроскопа, другий його вхід підключений до датчика положення візирної осі телевізійної камери по горизонталі, а вихід диференціального підсилювача через підсилювач потужності підключений до двигуна приводу телевізійної камери по горизонталі, який відрізняється тим, що в ньому вихід диференціального підсилювача системи повороту візирної осі по вертикалі підключений до схеми керування кадровою розгорткою монітора, а вихід диференціального підсилювача системи повороту візирної осі телекамери по горизонталі підключений до схеми керування рядковою розгорткою моніторa.
Текст
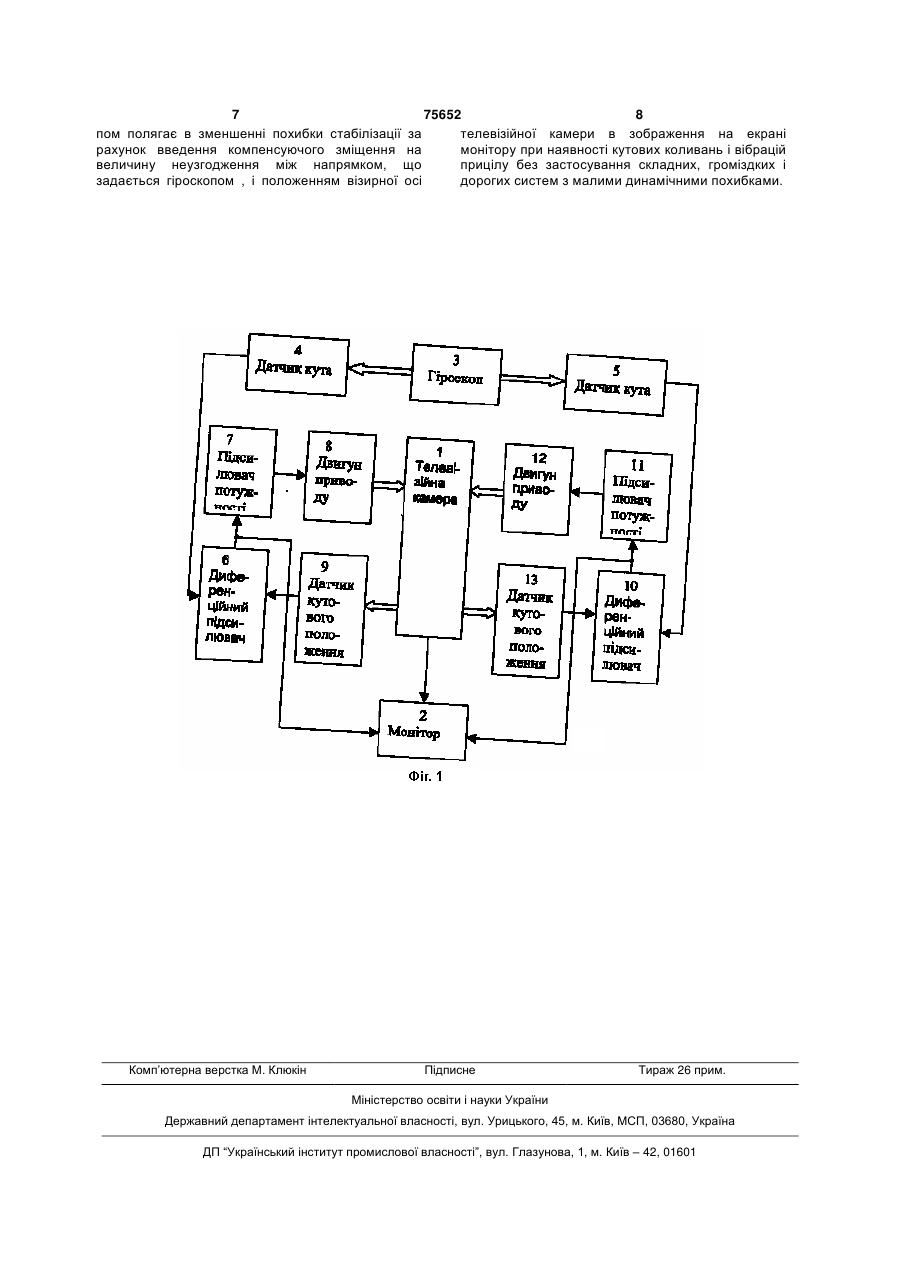
Пристрій для стабілізації зображення в оптико-телевізійному прицілі, що містить телевізійну камеру, монітор, гіроскоп з датчиками кута по вертикалі і горизонталі, систему повороту візирної осі телевізійної камери з двигуном приводу по вертикалі і диференціальним підсилювачем, перший вхід якого підключений до датчика кута по вертикалі гіроскопа, другий його вхід підключений до датчика кутового положення візирної осі телека C2 1 3 75652 4 візирної осі телевізійної камери по горизонталі, диференціального підсилювача через підсилювач вихід диференціального підсилювача через потужності підключений до двигуна приводу підсилювач потужності підключений до двигуна візирної осі телевізійної камери по горизонталі, приводу телевізійної камери по горизонталі. при цьому вихід диференціального підсилювача Система повороту візирної осі телевізійної касистеми повороту візирної осі телекамери по мери по горизонталі і вертикалі є платформою, на вертикалі підключений до схеми керування кадроякій установлена телевізійна камера. При цьому вою розгорткою монітору, а вихід платформа установлюється з можливістю розводиференціального підсилювача системи повороту роту її навколо горизонтальної і вертикальної візирної осі телекамери по горизонталі осей. Датчики положення візирної осі телевізійної підключений до схеми керування строчною розкамери механічно зв'язані з платформою і горткою монітору. об'єктом, на якому установлена телевізійна камеДосягненням технічного результату при ра, двигуни приводів забезпечують поворот платвикористанні даного винаходу є: форми з телевізійною камерою по вертикалі і Покращення стабілізації і підвищення горизонталі відповідно. роздільної здатності телевізійної системи, що При наявності неузгодження положення складається із телекамери і монітору, за рахунок візирної осі телевізійної камери з напрямком, що відображення поля зору прицілу з ціллю в одному і задається гіроскопом, сигнали з датчиків кута тому ж місці екрану монітору внаслідок зміщення гіроскопа і датчиків положення візирної осі зображення на величину, яка визначається велителевізійної камери по горизонталі або вертикалі, чиною неузгодження візирної осі телевізійної кабудуть різної величини, сигнали, пропорційні мери з напрямком, який задається гіроскопом. різниці сигналів з датчиків кута гіроскопа і датчиків На фіг.1 зображена структурна схема приположення візирної осі телевізійної камери з строю для стабілізації зображення в оптико виходів відповідних диференціальних телевізійному прицілі. підсилювачів через посилювачі потужності постуПропонований пристрій для стабілізації зобпають на двигуни приводу, які забезпечують повораження в оптико-телевізійному прицілі містить рот платформи в напрямку зменшення величини телевізійну камеру 1, монітор 2, що складають неузгодження з напрямком, що задається телевізійну систему, гіроскоп 3 з датчиками кута по гіроскопом. вертикалі 4 і горизонталі 5, диференціальний Недоліком відомого пристрою є похибка підсилювач 6, підсилювач потужності 7, двигун стабілізації із-за наявності динамічної похибки сисприводу 8, що утворюють систему повороту теми повороту телевізійної камери при наявності візирної осі телевізійної камери по горизонталі, кутових коливань і вібрацій об'єкта, на якому датчик кутового положення візирної осі установлюється відомий пристрій. Причиною цієї телевізійної камери по горизонталі 9, похибки є великий момент інерції платформи з диференціальний підсилювач 10, підсилювач телевізійною камерою. потужності 11, двигун приводу 12, що утворюють В основу винаходу поставлена задача вдоскосистему повороту візирної осі телевізійної камери налення оптико-телевізійного прицілу, в якому за по вертикалі, датчик кутового положення візирної рахунок реалізації запропонованого пристрою для осі телевізійної камери по вертикалі 13. стабілізації зображення в оптико - телевізійному Вихід телекамери 1 підключений до монітору прицілі забезпечується підвищення ефективності 2. Гіроскоп 3 механічно зв'язаний з датчиками кута стабілізації зображення шляхом зміщення зобрапо горизонталі 4 і вертикалі 5. Датчик положення ження на екрані монітору для компенсації неузтелевізійної камери по горизонталі 9 підключений годження напрямку, заданого гіроскопом і візирної до першого входу диференціального підсилювача осі телевізійної камери без ускладнення приводів 6, другий вхід якого підключений до датчика кута повороту візирної осі телевізійної камери. по горизонталі 4 гіроскопу 3. Вихід Для вирішення цієї задачі в пристрої для диференціального підсилювача 6 підключений стабілізації зображення в оптико - телевізійному через підсилювач потужності 7 до двигуна приводу прицілі, що містить телевізійну камеру, монітор, 8, кінематичне зв'язаного з телекамерою 1. Датчик гіроскоп з датчиками кута по вертикалі і положення візирної осі телевізійної камери по горизонталі, систему повороту візирної осі вертикалі 13 підключений до першого входу телевізійної камери з двигуном приводу по диференціального підсилювача 10, другий вхід вертикалі, диференціальним підсилювачем, перякого підключений до датчика кута по вертикалі 5 ший вхід якого підключений до датчика кута по гіроскопу 3. Вихід диференціального підсилювача вертикалі гіроскопу, другий вхід підключений до 10 через підсилювач потужності 11 підключений до датчика кутового положення візирної осі двигуна приводу 12, кінематичне зв'язаного з телевізійної камери по вертикалі, вихід телевізійною камерою 1. диференціального підсилювача через підсилювач Кадровий синхроімпульс телевізійної камери 1 потужності підключений до двигуна приводу поступає також на монітор 2. Вихід візирної осі телевізійної камери по вертикалі, сисдиференціального підсилювача 6 системи поворотему повороту візирної осі телевізійної камери по ту візирної осі телевізійної камери по горизонталі горизонталі з диференціальним підсилювачем, підключений до входу керування строчною розперший вхід якого підключений до датчика кута по горткою монітору 2. Вихід диференціального горизонталі гіроскопу, другий вхід підключений до підсилювача 10 системи повороту візирної осі датчика кутового положення візирної осі телевізійної камери по вертикалі підключений до телевізійної камери по горизонталі, вихід входу керування кадровою розгорткою монітору 2. 5 75652 6 Стабілізація зображення з використанням чином, зображення на екрані монітору займає на пропонованого пристрою здійснюється наступним екрані монітору , відносно його геометричного чином. центру, те положення, яке воно б займало при При наявності кутових коливань об'єкта, на відсутності кутової різниці між напрямком, що якому розміщений оптико - телевізійний приціл, задається гіроскопом 3 і положенням візирної осі гіроскоп 3 зберігає своє положення в просторі. телевізійної камери по положенням візирної осі Датчик кута по вертикалі 5 механічно зв'язаний з телевізійної камери по горизонталі, тобто для гіроскопом З і корпусом прицілу. Датчик кута по телевізійної системи прицілу компенсується погоризонталі 4 механічно зв'язаний з гіроскопом 3 і хибка стабілізації по горизонталі. корпусом прицілу. На виході датчика кута 4 Подібно проходить стабілізація зображення по з'являється сигнал, пропорційний величині кута вертикалі. Сигнал з датчика кута 5 поступає на між напрямком, що задається положенням перший вхід диференційного підсилювача 10, на гіроскопу 3 і корпусом прицілу по горизонталі, а на другий вхід його поступає сигнал 3 датчика кутововиході датчика кута 5 - сигнал, пропорційний го положення візирної осі телевізійної камери по величині кута між напрямком, що задається половертикалі 13. Сигнал, пропорційний величині женням гіроскопу 3 і корпусом прицілу по кутової різниці між напрямком, що задається вертикалі. Датчики кутового положення візирної гіроскопом 3 і положенням візирної осі телевізійної осі телевізійної камери по горизонталі 9 і по камери по вертикалі з виходу диференційного вертикалі 13 механічно зв'язані з корпусом прицілу підсилювача 10 через підсилювач потужності 11 і платформою, в якій установлена телевізійна капоступає на двигун приводу 12, який забезпечує мера 1. Таким чином на виході датчика положення розворот платформи з телевізійною камерою 1, а 9 з'являється сигнал, пропорційний величині кута отже змінює напрямок візирної осі телевізійної між положенням платформи з телевізійною камекамери по вертикалі до тих пір, поки вихідний сигрою 1, а отже напрямком її візирною віссю і корпунал на виході диференційного підсилювача не сом прицілу по горизонталі, а на виході датчика стане рівним нулю. Сигнал похибки, пропорційний положення 13 сигнал, пропорційний величині кута величині кутової різниці між напрямком, що між корпусом прицілу і напрямком візирної осі задається гіроскопом 3 і положенням візирної осі телевізійної камери по вертикалі. телевізійної камери 1 по вертикалі з виходу Сигнал, пропорційний величині кута між надиференційного підсилювача 10 поступає на вхід прямком, що задається положенням гіроскопу 3 і схеми керування кадровою розгорткою монітору 2. корпусом прицілу по горизонталі з виходу датчика При наявності цього сигналу зображення на екрані 4, поступає на перший вхід диференціального монітору 2 зміщується по вертикалі на величину, підсилювача 6, на другий вхід якого поступає сигпропорційну величині кутової різниці між напрямнал з датчика кутового положення візирної осі ком, що задається гіроскопом 3 і положенням телевізійної камери по горизонталі 9, візирної осі телевізійної камери 1 по вертикалі. пропорційний величині кута між корпусом Знак зміщення визначається знаком цієї різниці. прицілом і напрямком візирної осі телевізійної каТаким чином, зображення на екрані монітору, мери 1 по горизонталі. На виході диференційного відносно геометричного центру монітору, займає підсилювача 6 з'являється сигнал, пропорційний положення, яке воно б займало при відсутності різниці між величинами сигналів, що поступають кутової різниці між напрямком, що задається на його входи, а отже і величині неузгодження між гіроскопом 4 і положенням візирної осі телевізійної напрямком, що задається гіроскопом 3 і візирною камери по вертикалі, тобто для телевізійної сисвіссю телевізійної камери 1 по горизонталі. Цей теми прицілу компенсується похибка стабілізації сигнал через підсилювач потужності 7 поступає на по вертикалі. Для телевізійної камери з накопидвигун приводу 8, який розвертає платформу з ченням інформації за період кадрової розгортки, телевізійною камерою 1, а отже змінює напрямок наприклад, на відиконі, відбувається розмазування візирної осі телевізійної камери 1 по горизонталі зображення, яке визначається величиною до тих пір, поки вихідний сигнал на виході зміщення зображення на чутливому шарі відикону диференційного підсилювача 6 не стане рівнім за період кадрової розгортки. Так як величина нулю. Внаслідок наявності моменту інерції платперіоду кадрової розгортки в декілька разів менша форми з телевізійною камерою 1, наявності запостійної часу ока оператора прицілу, то якість тримки в часі роботи системи повороту візирної осі зображення при спостереженні зображення з телевізійної камери по горизонталі, на виході компенсацією зміщення буде визначатись диференціального підсилювача 6 буде наявний зміщеним зображенням за період кадрової розсигнал похибки, пропорційний величині кутової гортки, а не за постійну часу ока оператора, що різниці між напрямком, що задається гіроскопом 3 і підвищує роздільну здатність системи оптико положенням візирної осі телевізійної камери 1 по телевізійний приціл - оператор. горизонталі. Цей сигнал з виходу На НВК "Фотоприлад" виготовлений експеридиференціального підсилювача 6 поступає на вхід ментальний зразок оптико-телевізійного прицілу з керування строчною розгорткою монітору 2. При стабілізацією зображення за рахунок компенсації наявності цього сигналу зображення на екрані зміщення зображення на екрані монітора. монітору 2 зміщується на величину, пропорційну Проведені досліди показали покращення величині кутової різниці між напрямком, що стабілізації зображення при наявності вібраційного задається гіроскопом 3 і положенням візирної осі впливу на приціл. телевізійної камери 1 по горизонталі. Знак Перевага пристрою для стабілізації зображензміщення визначається знаком цієї різниці. Таким ня в оптико - телевізійному прицілі перед прототи 7 75652 8 пом полягає в зменшенні похибки стабілізації за телевізійної камери в зображення на екрані рахунок введення компенсуючого зміщення на монітору при наявності кутових коливань і вібрацій величину неузгодження між напрямком, що прицілу без застосування складних, громіздких і задається гіроскопом , і положенням візирної осі дорогих систем з малими динамічними похибками. Комп’ютерна верстка М. Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for stabilization of image in optical-television sight
Автори англійськоюHordienko Valentyn Ihorovych, Serbin Ivan Semenovych
Назва патенту російськоюУстройство для стабилизации изображения в оптико-телевизионном прицеле
Автори російськоюГордиенко Валентин Игоревич, Сербин Иван Семенович
МПК / Мітки
МПК: F41G 3/02
Мітки: пристрій, оптико-телевізійному, прицілі, зображення, стабілізації
Код посилання
<a href="https://ua.patents.su/4-75652-pristrijj-dlya-stabilizaci-zobrazhennya-v-optiko-televizijjnomu-pricili.html" target="_blank" rel="follow" title="База патентів України">Пристрій для стабілізації зображення в оптико-телевізійному прицілі</a>
Пристрій для формування комплексного зображення
Номер патенту: 35166
Опубліковано: 15.03.2001
Автори: Зеляновський Юрій Евгенович, Муравов Сергій Олександрович, Кондратов Петро Олександрович, Боженко Ігор Борисович, Воронов Сергій Олександрович
МПК: H04N 5/33
Мітки: зображення, пристрій, комплексного, формування
Формула / Реферат:
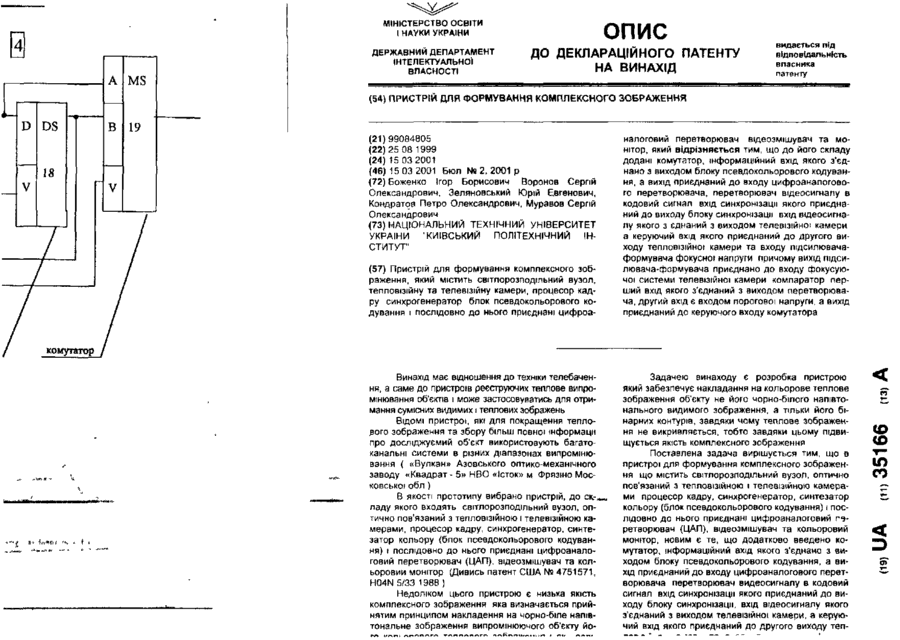
Пристрій для формування комплексного зображення, який містить світлорозподільний вузол, тепловізійну та телевізійну камери, процесор кадру, синхрогенератор, блок псевдокольорового кодування і послідовно до нього приєднані цифроаналоговий перетворювач, відеозмішувач та монітор, який відрізняється тим, що до його складу додані комутатор, інформаційний вхід якого з'єднано з виходом блоку псевдокольорового кодування, а вихід приєднаний до входу...
Пристрій для визначення просторового зміщення зображення об’єкту по відношенню до еталону зображення
Номер патенту: 30433
Опубліковано: 15.11.2000
Автори: Бражник Олександр Михайлович, Тернова Тетяна Іванівна, Рожков Сергій Олександрович, Тимофеєв Констянтин Васильович, Храпливий Анатолій Петрович
Мітки: пристрій, зміщення, об'єкту, просторового, відношенню, визначення, еталону, зображення
Формула / Реферат:
1. Пристрій для визначення просторового зміщення зображення об'єкту по відношенню до еталону зображення, що містить послідовно розташовані прилад для знімання інформації, прилад для зберігання еталону, перетворювач Фур'є і прилад для обчислення кореляційної функції, відрізняючий тим, що він додатково містить два смугових фільтра, входи яких електрично зв'язані з перетворювачем сигналу зображення і сигналу еталону відповідно, а виходи...
Спосіб повороту вікна зображення та пристрій для його реалізації
Номер патенту: 33248
Опубліковано: 15.02.2001
Автор: Романюк Олександр Никифорович
МПК: G09G 1/16
Мітки: спосіб, повороту, пристрій, зображення, реалізації, вікна
Текст:
...(З.Л. Рабинович, В.А. Рама,наускас. Типовые операции в вычислительных машинах. К.» Техніка, 1980, с 215-216 - аналог). Спосіб має низьку швидкодію, яка обумовлена тим, що нові координати однієї точки зображення обчислюються послідовно для обох координат за п тактів, що складе загальний час обчислень, рівний тривалості 2-п тактів, а також апаратна складність реалізації даного способу, яка заключаемся в необхідності спеціального...
Пристрій формування сигналу тепловізійного зображення
Номер патенту: 47719
Опубліковано: 15.07.2002
Автори: Кондратов Петро Олександрович, Шклярський Володимир Іванович, Гой Віталій Миколайович
МПК: H04N 5/33
Мітки: пристрій, формування, зображення, сигналу, тепловізійного
Формула / Реферат:
Пристрій формування сигналу тепловізійного зображення, який містить аналого-цифровий перетворювач, блок пам'яті, перший та другий комутатори, різницевий підсилювач, блок синхронізації, цифро-аналоговий перетворювач, вихід аналого-цифрового перетворювача з'єднаний із входом блока пам'яті, перший, другий та третій виходи блока синхронізації з'єднані із синхровходом аналого-цифрового перетворювача, синхровходом блока пам'яті та синхровиходом...
Пристрій для отримання об’ємного зображення мікрооб’єктів
Номер патенту: 14149
Опубліковано: 15.05.2006
Автори: Клименко Ігор Володимирович, Білинський Йосип Йосипович
МПК: G02B 21/06
Мітки: об`ємного, зображення, отримання, мікрооб'єктів, пристрій
Формула / Реферат:
Пристрій для отримання об'ємного зображення мікрооб'єктів, який містить лампу з блоком живлення, монохроматор, конденсор, двигун, стіл мікроскопа, об'єктив, оптичний вхід якого зв'язаний з оптичним виходом конденсора, окуляр фотометричного тракту, оптичний вхід якого зв'язаний з оптичним виходом об'єктива, діафрагму, розсіювальну лінзу, оптичний вхід якої зв'язаний через діафрагму з оптичним виходом окуляра фотометричного тракту, фотоматрицю,...
Попередній патент: Засіб для підвищення резистентності організму до дії іонізуючої радіації
Наступний патент: Програмований логічний контролер
Випадковий патент: Гідравлічна система комбайна шахтного прохідницького