Поліспаст
Номер патенту: 76184
Опубліковано: 25.12.2012
Формула / Реферат
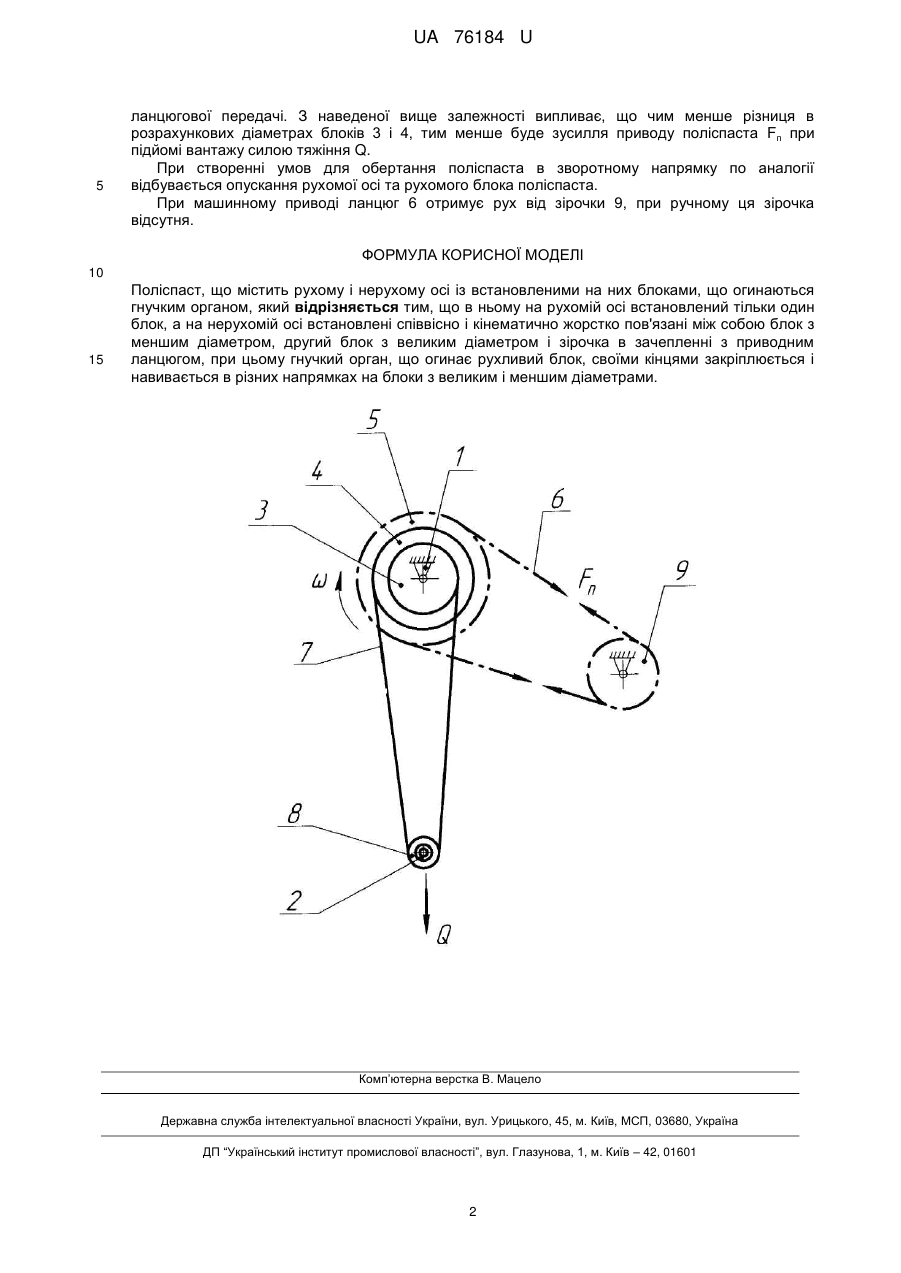
Поліспаст, що містить рухому і нерухому осі із встановленими на них блоками, що огинаються гнучким органом, який відрізняється тим, що в ньому на рухомій осі встановлений тільки один блок, а на нерухомій осі встановлені співвісно і кінематично жорстко пов'язані між собою блок з меншим діаметром, другий блок з великим діаметром і зірочка в зачепленні з приводним ланцюгом, при цьому гнучкий орган, що огинає рухливий блок, своїми кінцями закріплюється і навивається в різних напрямках на блоки з великим і меншим діаметрами.
Текст
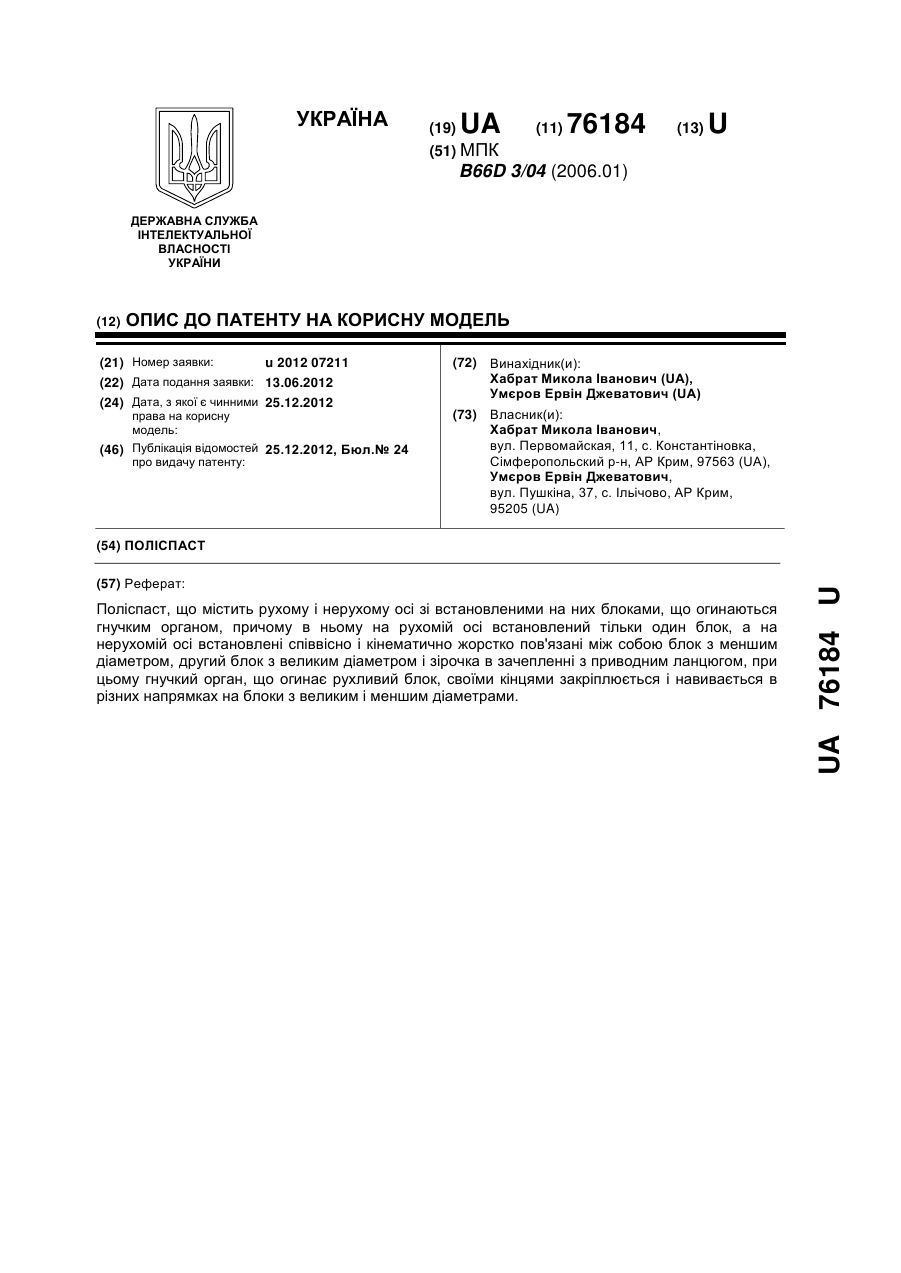
Реферат: Поліспаст, що містить рухому і нерухому осі зі встановленими на них блоками, що огинаються гнучким органом, причому в ньому на рухомій осі встановлений тільки один блок, а на нерухомій осі встановлені співвісно і кінематично жорстко пов'язані між собою блок з меншим діаметром, другий блок з великим діаметром і зірочка в зачепленні з приводним ланцюгом, при цьому гнучкий орган, що огинає рухливий блок, своїми кінцями закріплюється і навивається в різних напрямках на блоки з великим і меншим діаметрами. UA 76184 U (54) ПОЛІСПАСТ UA 76184 U UA 76184 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, зокрема до пристроїв для зменшення зусилля в приводній гілці при підйомі вантажів, і може знайти застосування як в вантажопідіймальних машинах, так і при створенні натягу проводів електропередач і в інших випадках. Відома конструкція ступеневого поліспаста (Крайнев А.Ф. Механіка машин. Фундаментальний довідник. - М.: Машинобудування, 2000. - C. 505, рис. Б. Аналог), що містить послідовно з'єднані між собою кілька кратних поліспастів з кратністю, рівною двом кожного з них, складається з рухомого блока, що огинається гнучким органом. При цьому навантаження виробляється на підвішену вісь найпершого кратного поліспаста, а привід здійснюється на приводну гілку останнього з кратних поліспастів. Основний недолік поліспастів таких пристроїв досить великі габарити, як у початковому, так і в кінцевому положеннях, наприклад, при підйомі вантажу. Найбільш близьким за технічною суттю запропонованого технічного рішення є кратний поліспаст (Крайнов А.Ф. Механіка машин. Фундаментальний довідник. - М.: Машинобудування, 2000. - C. 505, рис. А. Прототип), що містить нерухому, рухливу осі з комплектами блоків, що огинаються послідовно гнучким органом. При цьому навантаження поліспаста проводиться через вантажний крюк рухомої осі, а привід здійснюється на гнучкий орган, що сходить з останнього блока. Початок гнучкого органу (другий його кінець) закріплюється або на нерухомій осі, або на рухомій. Основний недолік цього кратного поліспаста полягає в його високій металоємності і в ряді випадків великими габаритами в осьовому напрямку блоків. Так, наприклад, при кратності поліспаста 12 для його здійснення необхідно встановити на нерухомій і рухомій осях збільшених довжин комплекти по 6 блоків, а всього 12. На практиці в опорах кожного блока встановлюється по 2 підшипники кочення. Для розглянутого прикладу потрібно 24 підшипники кочення. Технічна задача корисної моделі полягає в створенні спрощеної конструкції поліспаста, що зберігає необхідну кратність. Технічний результат - зменшення металоємності, габаритів поліспаста і довжини гнучкого органу. Технічна задача і технічний результат досягається тим, що на рухомій осі при будь-якій кратності поліспаста встановлюється лише один блок, а на нерухомій осі два блоки, жорстко зв'язані між собою з різними діаметрами, при цьому гнучкий орган одним кінцем закріплений і частково навитий на блок меншого діаметра, а другим кінцем гнучкий орган закріплений і частково навитий у зворотному напрямку на блоці більшого діаметра. Співвісно блокам на нерухомій осі встановлюється і кінематично жорстко з ним з'єднується зірочка, що огинається приводним ланцюгом. Наведені ознаки достатні для здійснення пропонованого технічного рішення та отримання технічного результату. Причинно-наслідковий зв'язок нових ознак і досягаємого технічного результату полягає в наступному: - нерухомі блоки на нерухомій осі поліспаста кінематично жорстко і співвісно з'єднані між собою і виконані з різними діаметрами; - гнучкий орган своїми кінцями закріплюється і навивається в різних напрямках на нерухомих блоках; - на рухомій осі поліспаста при будь-якій його кратності встановлюється тільки один блок; - на нерухомій осі поліспаста співвісно блокам і кінематично жорстко з'єднана з ним зірочка, охоплювана приводним ланцюгом. На кресленні представлена схема розглянутої конструкції поліспаста на вигляді збоку. Поліспаст містить нерухому 1, рухливу 2 осі. При цьому на нерухомій осі встановлено співвісно і кінематично жорстко з'єднані між собою блоки меншого діаметра 3, більшого діаметра 4 і зірочка 5, охоплювана приводним ланцюгом 6. Гнучкий орган 7 огинає рухливий блок 8, своїми кінцями закріплюється і навивається в різних напрямках на нерухомі блоки 3 і 4. Працює поліспаст наступним чином. При створенні руху ланцюгу 6, останній передається на зірочку 5 і блокам 3 і 4, наприклад, за годинниковою стрілкою. При цьому гнучкий орган 7 більшою мірою навивається на більший діаметр D блока 4, ніж змотується з меншого діаметра d блока 3. В результаті цього відбувається підйом рухомої осі 2 і рухомого блока 8 на висоту Н, яка визначається залежністю H=(D-d)/2. Прийнявши рівність розрахункових діаметрів більшого блока D 4 і приводний зірочки Dзір5, визначаємо зусилля Fп на привід поліспаста при підйомі вантажу силою тяжіння Q, яка в даному випадку складе Fп=0,5 Q(1-d/D)/, де - коефіцієнт корисної дії поліспаста і приводної 1 UA 76184 U 5 ланцюгової передачі. З наведеної вище залежності випливає, що чим менше різниця в розрахункових діаметрах блоків 3 і 4, тим менше буде зусилля приводу поліспаста Fп при підйомі вантажу силою тяжіння Q. При створенні умов для обертання поліспаста в зворотному напрямку по аналогії відбувається опускання рухомої осі та рухомого блока поліспаста. При машинному приводі ланцюг 6 отримує рух від зірочки 9, при ручному ця зірочка відсутня. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Поліспаст, що містить рухому і нерухому осі із встановленими на них блоками, що огинаються гнучким органом, який відрізняється тим, що в ньому на рухомій осі встановлений тільки один блок, а на нерухомій осі встановлені співвісно і кінематично жорстко пов'язані між собою блок з меншим діаметром, другий блок з великим діаметром і зірочка в зачепленні з приводним ланцюгом, при цьому гнучкий орган, що огинає рухливий блок, своїми кінцями закріплюється і навивається в різних напрямках на блоки з великим і меншим діаметрами. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюPulley block
Автори англійськоюKhabrat Mykola Ivanovych, Umerov Ervin Dzhevlatovych
Назва патенту російськоюПолиспаст
Автори російськоюХабрат Николай Иванович, Умеров Эрвин Джеватович
МПК / Мітки
МПК: B66D 3/04
Мітки: поліспаст
Код посилання
<a href="https://ua.patents.su/4-76184-polispast.html" target="_blank" rel="follow" title="База патентів України">Поліспаст</a>
Безпечний здвоєний поліспаст

Номер патенту: 76498
Опубліковано: 15.08.2006
Автор: Стукаленко Михайло Іванович
МПК: B66C 15/00, B66D 3/00
Мітки: поліспаст, безпечний, здвоєний
Формула / Реферат:
Безпечний здвоєний поліспаст, який містить рухому обойму блоків, що обгинаються канатами, одні кінці яких закріплені на барабані лебідки, а другі на зрівняльному барабані, внутрішній простір якого розділений на дві порожнини двома поздовжньо розташованими пластинами, одна з яких – рухома - закріплена на внутрішній поверхні оболонки барабана, а друга - нерухома - на його валу, порожнини заповнені рідиною, для перетікання якої із однієї...
Вантажний поліспаст охримовича в.-р.м.

Номер патенту: 89411
Опубліковано: 25.01.2010
Автор: Охримович Володимир-Роман Маркіянович
МПК: B66D 3/00, B66C 23/12
Мітки: в.-р.м, вантажний, поліспаст, охримовича
Формула / Реферат:
1. Вантажний поліспаст, що містить обладнані вільнообертовими блоками нижню і верхню горизонтальні осі поліспаста, запасований з охопленням нижніх і верхніх блоків канат з можливістю введення гакової підвіски в порожнину оголовка стріли, прикріплений клиновою втулкою до оголовка стріли один кінець каната і приєднаний до барабана вантажної лебідки другий кінець каната, який відрізняється тим, що в порожнині оголовка стріли частина від...
Безпечний здвоєний поліспаст

Номер патенту: 33449
Опубліковано: 15.02.2001
Автори: Стукаленко Михайло Іванович, Семенюк Володимир Федорович, Хвищук Олександр Сергійович, Стукаленко Олександр Михайлович
МПК: B66C 15/00, B66D 3/00
Мітки: поліспаст, безпечний, здвоєний
Текст:
...пристрою установлено сегментне фрикційне кільце з біконічною внутрішньою і циліндричною зовнішньою поверхнями, кількість виступів для кожного упора дорівнює двом, кут між виступами однієї пари конусів меньший, ніж у другій. Технічним ефектом винаходу є забезпечення зрівняльним фрикційним пристроєм двоступінчастого опору змотуванню з його оболонки утримуючого вантаж каната, унаслідок чого збільшується час прикладення навантаження до указаного...
Шківочний блок і поліспаст ушп-1 (“універсальний шківочний блок і поліспаст модель-1″)
Номер патенту: 46836
Опубліковано: 11.01.2010
Автор: Степанов Олександр Петрович
МПК: B66D 3/00
Мітки: універсальний, ушп-1, шківочний, поліспаст, блок, модель-1
Формула / Реферат:
1. Шківочний блок, що містить шківи й гнучкі елементи, який відрізняється тим, що він містить ведучу каретку 1, ведену каретку 2, проміжну каретку 3 і першу й другу нерухливі точки опори 4 і 5 і привідний шків 22, причому ведуча каретка 1, ведена каретка 2 і проміжна каретка 3 установлені співвісно,до складу ведучої каретки 1 входять жорстко з'єднані сполучною муфтою приймальний шків 6 і ведучий шків 7,до складу веденої каретки...
Безпечний здвоєний поліспаст

Номер патенту: 77287
Опубліковано: 15.11.2006
Автор: Стукаленко Михайло Іванович
МПК: B66C 15/00, B66D 3/00
Мітки: безпечний, поліспаст, здвоєний
Формула / Реферат:
Безпечний здвоєний поліспаст, який містить рухому обойму блоків, що обгинаються канатами, одні кінці яких закріплені на барабані лебідки, а другі на оболонці зрівняльного барабана, внутрішній простір котрого заповнений рідиною і розділений на дві порожнини поршнем, що утворює з оболонкою гвинтову пару, а з валом рухоме шліцьове з'єднання, при цьому дросельні елементи утворюють в поршні дросельні отвори, через котрі рідина з відповідним опором...
Попередній патент: Високовольтний імпульсний конденсатор
Випадковий патент: Спосіб визначення фотоактивних центрів в кристалічних матеріалах