П’єзоелектричний двигун
Номер патенту: 76759
Опубліковано: 15.09.2006
Автори: Лавріненко В'ячеслав Васильович, Петренко Сергій Федорович, Франченко Роман Васильович, Лукін Вадим Васильович, Коваль Віталій Степанович

Формула / Реферат
1. П'єзоелектричний двигун, що має п'єзоелемент з електродами та виводами для збудження повздовжніх коливань, який фрикційно взаємодіє з притиснутою до нього за допомогою притискного пристрою рухомою частиною через принаймні дві контактні площадки, що знаходяться у максимумах коливальних швидкостей, який відрізняється тим, що розміри п'єзоелемента та форма електродів підібрані з умови збудження одним джерелом змінної напруги першої моди повздовжніх коливань по одному напрямку та парної моди повздовжніх коливань по напрямку, перпендикулярному першому.
2. П'єзоелектричний двигун за п. 1, який відрізняється тим, що п'єзоелемент виконано у формі прямокутної пластини, ширина якої дорівнює:
![]()
де:
![]() - довжина хвилі повздовжніх коливань, причому рухома частина двигуна встановлена з можливістю її лінійного переміщення.
- довжина хвилі повздовжніх коливань, причому рухома частина двигуна встановлена з можливістю її лінійного переміщення.
3. П'єзоелектричний двигун за п. 1, який відрізняється тим, що п'єзоелемент виконано у формі циліндричної оболонки, висота якої дорівнює:
![]()
причому рухома частина двигуна встановлена з можливістю обертання і являє собою принаймні один диск, притиснутий притискним пристроєм до контактних площадок, які розміщено на торцевих поверхнях п'єзоелемента.
4. П'єзоелектричний двигун за п. 1, який відрізняється тим, що п'єзоелемент виконано у формі кільця, ширина якого дорівнює:
![]()
причому рухома частина двигуна установлена з можливістю обертання і являє собою принаймні один зрізаний конус, який притиснуто притискним пристроєм до контактних площадок, які розташовані на лінії перетину плоскої та циліндричної поверхонь кільця.
5. П'єзоелектричний двигун за пп. 2-4, який відрізняється тим, що має три електроди та три виводи, один з яких постійно, а два інших мають можливість бути почергово підключеними до джерела змінної напруги для отримання реверсивного руху рухомої частини.
Текст
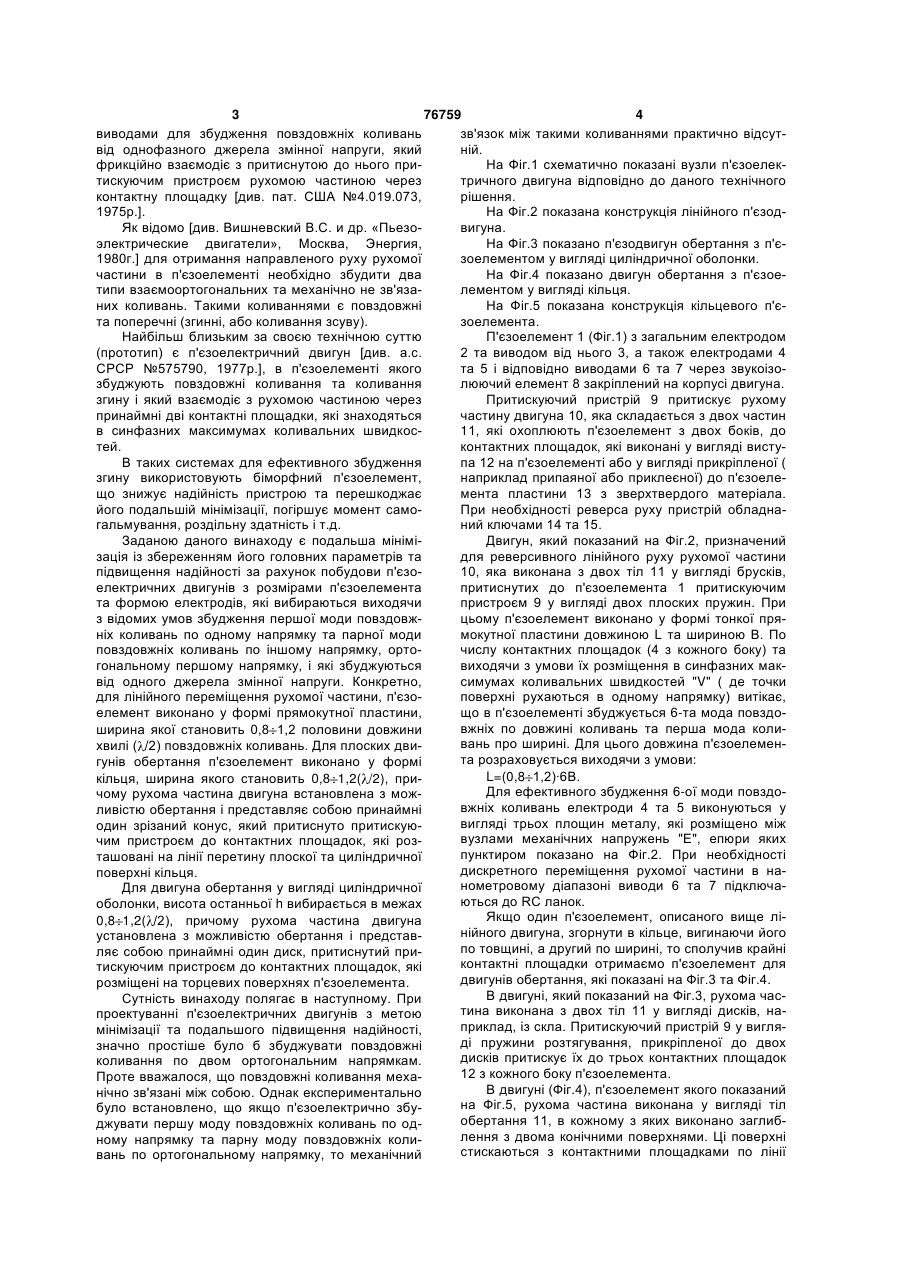
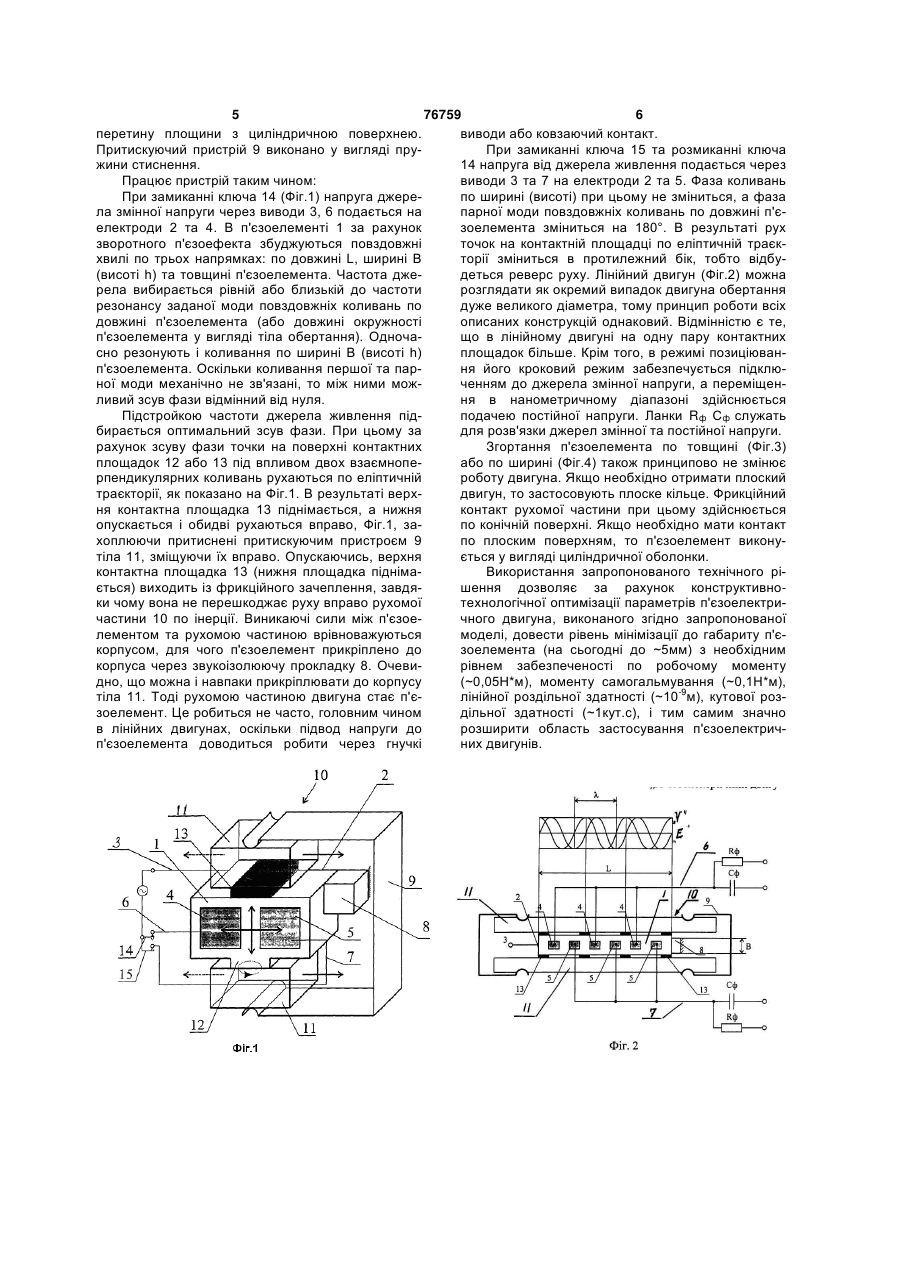
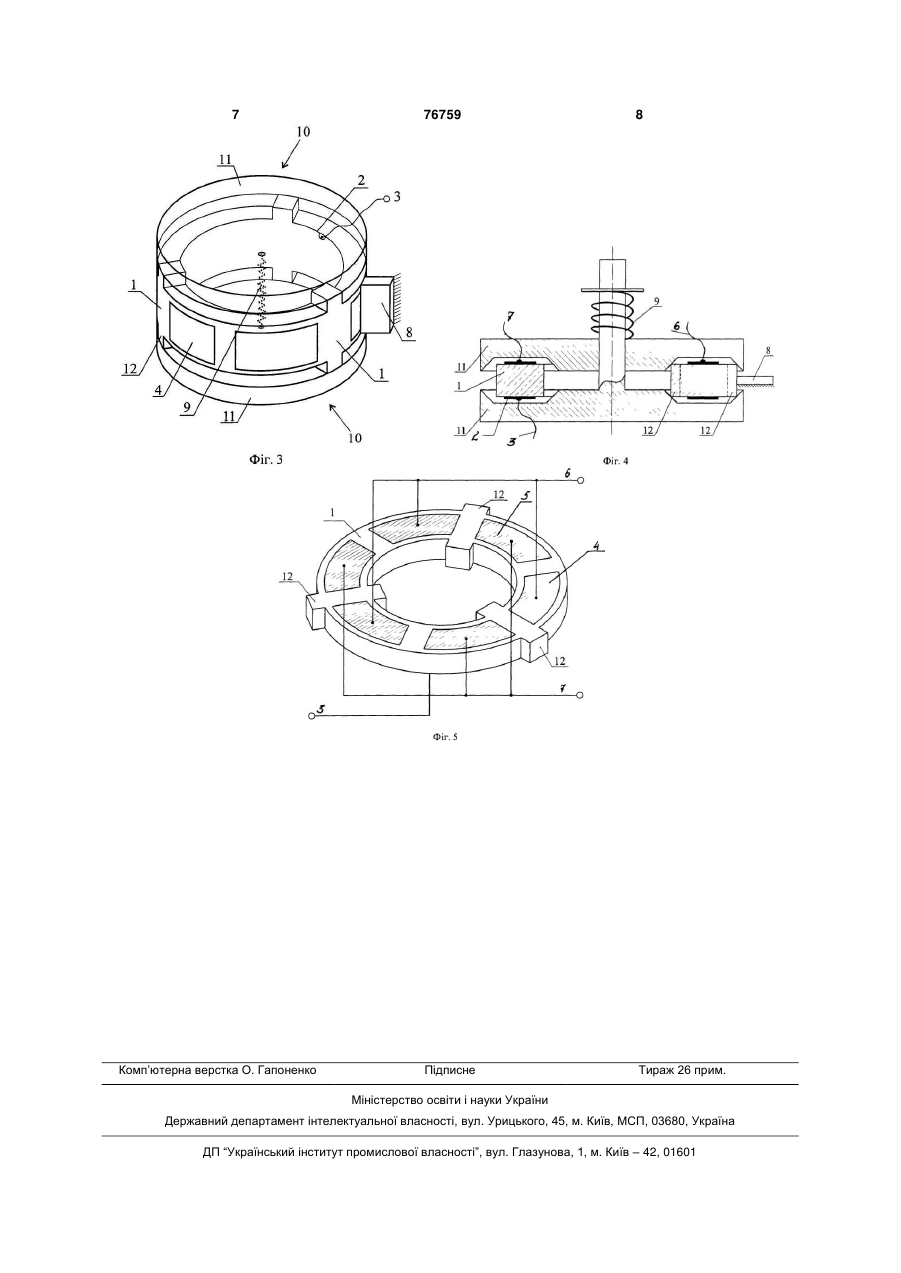
1. П'єзоелектричний двигун, що має п'єзоелемент з електродами та виводами для збудження повздовжніх коливань, який фрикційно взаємодіє з притиснутою до нього за допомогою притискного пристрою рухомою частиною через принаймні дві контактні площадки, що знаходяться у максимумах коливальних швидкостей, який відрізняється тим, що розміри п'єзоелемента та форма електродів підібрані з умови збудження одним джерелом змінної напруги першої моди повздовжніх коливань по одному напрямку та парної моди повздовжніх коливань по напрямку, перпендикулярному першому. 2. П'єзоелектричний двигун за п. 1, який відрізняється тим, що п'єзоелемент виконано у формі прямокутної пластини, ширина якої дорівнює: 2 3 76759 4 виводами для збудження повздовжніх коливань зв'язок між такими коливаннями практично відсутвід однофазного джерела змінної напруги, який ній. фрикційно взаємодіє з притиснутою до нього приНа Фіг.1 схематично показані вузли п'єзоелектискуючим пристроєм рухомою частиною через тричного двигуна відповідно до даного технічного контактну площадку [див. пат. США №4.019.073, рішення. 1975р.]. На Фіг.2 показана конструкція лінійного п'єзодЯк відомо [див. Вишневский B.C. и др. «Пьезовигуна. электрические двигатели», Москва, Энергия, На Фіг.3 показано п'єзодвигун обертання з п'є1980г.] для отримання направленого руху рухомої зоелементом у вигляді циліндричної оболонки. частини в п'єзоелементі необхідно збудити два На Фіг.4 показано двигун обертання з п'єзоетипи взаємоортогональних та механічно не зв'язалементом у вигляді кільця. них коливань. Такими коливаннями є повздовжні На Фіг.5 показана конструкція кільцевого п'єта поперечні (згинні, або коливання зсуву). зоелемента. Найбільш близьким за своєю технічною суттю П'єзоелемент 1 (Фіг.1) з загальним електродом (прототип) є п'єзоелектричний двигун [див. а.с. 2 та виводом від нього 3, а також електродами 4 СРСР №575790, 1977р.], в п'єзоелементі якого та 5 і відповідно виводами 6 та 7 через звукоізозбуджують повздовжні коливання та коливання люючий елемент 8 закріплений на корпусі двигуна. згину і який взаємодіє з рухомою частиною через Притискуючий пристрій 9 притискує рухому принаймні дві контактні площадки, які знаходяться частину двигуна 10, яка складається з двох частин в синфазних максимумах коливальних швидкос11, які охоплюють п'єзоелемент з двох боків, до тей. контактних площадок, які виконані у вигляді вистуВ таких системах для ефективного збудження па 12 на п'єзоелементі або у вигляді прикріпленої ( згину використовують біморфний п'єзоелемент, наприклад припаяної або приклеєної) до п'єзоелещо знижує надійність пристрою та перешкоджає мента пластини 13 з зверхтвердого матеріала. його подальшій мінімізації, погіршує момент самоПри необхідності реверса руху пристрій обладнагальмування, роздільну здатність і т.д. ний ключами 14 та 15. Заданою даного винаходу є подальша мініміДвигун, який показаний на Фіг.2, призначений зація із збереженням його головних параметрів та для реверсивного лінійного руху рухомої частини підвищення надійності за рахунок побудови п'єзо10, яка виконана з двох тіл 11 у вигляді брусків, електричних двигунів з розмірами п'єзоелемента притиснутих до п'єзоелемента 1 притискуючим та формою електродів, які вибираються виходячи пристроєм 9 у вигляді двох плоских пружин. При з відомих умов збудження першої моди повздовжцьому п'єзоелемент виконано у формі тонкої пряніх коливань по одному напрямку та парної моди мокутної пластини довжиною L та шириною В. По повздовжніх коливань по іншому напрямку, орточислу контактних площадок (4 з кожного боку) та гональному першому напрямку, і які збуджуються виходячи з умови їх розміщення в синфазних маквід одного джерела змінної напруги. Конкретно, симумах коливальних швидкостей "V" ( де точки для лінійного переміщення рухомої частини, п'єзоповерхні рухаються в одному напрямку) витікає, елемент виконано у формі прямокутної пластини, що в п'єзоелементі збуджується 6-та мода повздовжніх по довжині коливань та перша мода колиширина якої становить 0,8 1,2 половини довжини вань про ширині. Для цього довжина п'єзоелеменхвилі ( /2) повздовжніх коливань. Для плоских двита розраховується виходячи з умови: гунів обертання п'єзоелемент виконано у формі L=(0,8 1,2)·6В. кільця, ширина якого становить 0,8 1,2( /2), приДля ефективного збудження 6-ої моди повздочому рухома частина двигуна встановлена з можвжніх коливань електроди 4 та 5 виконуються у ливістю обертання і представляє собою принаймні вигляді трьох площин металу, які розміщено між один зрізаний конус, який притиснуто притискуювузлами механічних напружень "E", епюри яких чим пристроєм до контактних площадок, які розпунктиром показано на Фіг.2. При необхідності ташовані на лінії перетину плоскої та циліндричної дискретного переміщення рухомої частини в наповерхні кільця. нометровому діапазоні виводи 6 та 7 підключаДля двигуна обертання у вигляді циліндричної ються до RC ланок. оболонки, висота останньої h вибирається в межах Якщо один п'єзоелемент, описаного вище лі0,8 1,2( /2), причому рухома частина двигуна нійного двигуна, згорнути в кільце, вигинаючи його установлена з можливістю обертання і представпо товщині, а другий по ширині, то сполучив крайні ляє собою принаймні один диск, притиснутий приконтактні площадки отримаємо п'єзоелемент для тискуючим пристроєм до контактних площадок, які двигунів обертання, які показані на Фіг.3 та Фіг.4. розміщені на торцевих поверхнях п'єзоелемента. В двигуні, який показаний на Фіг.3, рухома часСутність винаходу полягає в наступному. При тина виконана з двох тіл 11 у вигляді дисків, напроектуванні п'єзоелектричних двигунів з метою приклад, із скла. Притискуючий пристрій 9 у виглямінімізації та подальшого підвищення надійності, ді пружини розтягування, прикріпленої до двох значно простіше було б збуджувати повздовжні дисків притискує їх до трьох контактних площадок коливання по двом ортогональним напрямкам. 12 з кожного боку п'єзоелемента. Проте вважалося, що повздовжні коливання мехаВ двигуні (Фіг.4), п'єзоелемент якого показаний нічно зв'язані між собою. Однак експериментально на Фіг.5, рухома частина виконана у вигляді тіл було встановлено, що якщо п'єзоелектрично збуобертання 11, в кожному з яких виконано заглибджувати першу моду повздовжніх коливань по одлення з двома конічними поверхнями. Ці поверхні ному напрямку та парну моду повздовжніх колистискаються з контактними площадками по лінії вань по ортогональному напрямку, то механічний 5 76759 6 перетину площини з циліндричною поверхнею. виводи або ковзаючий контакт. Притискуючий пристрій 9 виконано у вигляді пруПри замиканні ключа 15 та розмиканні ключа жини стиснення. 14 напруга від джерела живлення подається через Працює пристрій таким чином: виводи 3 та 7 на електроди 2 та 5. Фаза коливань При замиканні ключа 14 (Фіг.1) напруга джерепо ширині (висоті) при цьому не зміниться, а фаза ла змінної напруги через виводи 3, 6 подається на парної моди повздовжніх коливань по довжині п'єелектроди 2 та 4. В п'єзоелементі 1 за рахунок зоелемента зміниться на 180°. В результаті рух зворотного п'єзоефекта збуджуються повздовжні точок на контактній площадці по еліптичній траєкхвилі по трьох напрямках: по довжині L, ширині В торії зміниться в протилежний бік, тобто відбу(висоті h) та товщині п'єзоелемента. Частота джедеться реверс руху. Лінійний двигун (Фіг.2) можна рела вибирається рівній або близькій до частоти розглядати як окремий випадок двигуна обертання резонансу заданої моди повздовжніх коливань по дуже великого діаметра, тому принцип роботи всіх довжині п'єзоелемента (або довжині окружності описаних конструкцій однаковий. Відмінністю є те, п'єзоелемента у вигляді тіла обертання). Одночащо в лінійному двигуні на одну пару контактних сно резонують і коливання по ширині В (висоті h) площадок більше. Крім того, в режимі позиціюванп'єзоелемента. Оскільки коливання першої та парня його кроковий режим забезпечується підклюної моди механічно не зв'язані, то між ними можченням до джерела змінної напруги, а переміщенливий зсув фази відмінний від нуля. ня в нанометричному діапазоні здійснюється Підстройкою частоти джерела живлення підподачею постійної напруги. Ланки Rф Сф служать бирається оптимальний зсув фази. При цьому за для розв'язки джерел змінної та постійної напруги. рахунок зсуву фази точки на поверхні контактних Згортання п'єзоелемента по товщині (Фіг.3) площадок 12 або 13 під впливом двох взаємнопеабо по ширині (Фіг.4) також принципово не змінює рпендикулярних коливань рухаються по еліптичній роботу двигуна. Якщо необхідно отримати плоский траєкторії, як показано на Фіг.1. В результаті верхдвигун, то застосовують плоске кільце. Фрикційний ня контактна площадка 13 піднімається, а нижня контакт рухомої частини при цьому здійснюється опускається і обидві рухаються вправо, Фіг.1, запо конічній поверхні. Якщо необхідно мати контакт хоплюючи притиснені притискуючим пристроєм 9 по плоским поверхням, то п'єзоелемент виконутіла 11, зміщуючи їх вправо. Опускаючись, верхня ється у вигляді циліндричної оболонки. контактна площадка 13 (нижня площадка піднімаВикористання запропонованого технічного ріється) виходить із фрикційного зачеплення, завдяшення дозволяє за рахунок конструктивноки чому вона не перешкоджає руху вправо рухомої технологічної оптимізації параметрів п'єзоелектричастини 10 по інерції. Виникаючі сили між п'єзоечного двигуна, виконаного згідно запропонованої лементом та рухомою частиною врівноважуються моделі, довести рівень мінімізації до габариту п'єкорпусом, для чого п'єзоелемент прикріплено до зоелемента (на сьогодні до ~5мм) з необхідним корпуса через звукоізолюючу прокладку 8. Очевирівнем забезпеченості по робочому моменту дно, що можна і навпаки прикріплювати до корпусу (~0,05Н*м), моменту самогальмування (~0,1Н*м), тіла 11. Тоді рухомою частиною двигуна стає п'єлінійної роздільної здатності (~10-9м), кутової роззоелемент. Це робиться не часто, головним чином дільної здатності (~1кут.с), і тим самим значно в лінійних двигунах, оскільки підвод напруги до розширити область застосування п'єзоелектричп'єзоелемента доводиться робити через гнучкі них двигунів. 7 Комп’ютерна верстка О. Гапоненко 76759 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPiezoelectric motor
Автори англійськоюKoval Vitalii Stepanovych, Petrenko Serhii Fedorovych
Назва патенту російськоюПьезоэлектрический двигатель
Автори російськоюКоваль Виталий Степанович, Петренко Сергей Федорович
МПК / Мітки
МПК: H02N 2/00, H01L 41/09
Мітки: двигун, п'єзоелектричний
Код посилання
<a href="https://ua.patents.su/4-76759-pehzoelektrichnijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">П’єзоелектричний двигун</a>
П’єзоелектричний двигун
Номер патенту: 76167
Опубліковано: 17.07.2006
Автори: Лавріненко В'ячеслав Васильович, Петренко Сергій Федорович
МПК: H01L 41/09, H02N 2/00
Мітки: двигун, п'єзоелектричний
Формула / Реферат:
1. П'єзоелектричний двигун, який містить рухому частину (ротор або плунжер), що фрикційно взаємодіє з п'єзоелектричним осцилятором повздовжніх коливань, який встановлений через звукоізольовану прокладку на корпусі двигуна та має щонайменше один п'єзоелемент, який відрізняється тим, що п'єзоелектричний осцилятор містить щонайменше один пасивний камертонний резонатор і/або один п'єзоелектрично активний камертонний резонатор, одне плече якого...
П’єзоелектричний двигун
Номер патенту: 76220
Опубліковано: 17.07.2006
Автори: Лавріненко В'ячеслав Васильович, Петренко Сергій Федорович
МПК: H01L 41/09, H02N 2/00
Мітки: п'єзоелектричний, двигун
Формула / Реферат:
1. П'єзоелектричний двигун, що містить встановлені в корпусі статор та ротор з підключеним до нього навантаженням, що фрикційно взаємодіють через штовхачі, який відрізняється тим, що ротор встановлено з можливістю осьового лінійного переміщення, а статор встановлено в корпусі з можливістю обертання та осьового переміщення по гвинтовій лінії, наприклад, через з'єднання гвинт-гайка, до упору ротора в корпус.2. П'єзоелектричний двигун за...
Двигун самкевича а.м.
Номер патенту: 69458
Опубліковано: 15.09.2004
Автор: Самкевич Андрій Михайлович
МПК: F01B 3/00, F02B 75/40
Формула / Реферат:
Двигун, що має нерухомий циліндр у корпусі двигуна, рухомий ротор, де жорстко закріплений нахилений до осі ротора диск, рухомий поршень у циліндрі, який відрізняється тим, що він додатково оснащений нерухомим похилим диском, жорстко скріпленим з корпусом двигуна, і рухомою напрямною, в якій є штовхач, зв’язаний з одного боку з нерухомим похилим диском, а з іншого - з рухомим, кут нахилу до осі обертання ротора рухомого і нерухомого дисків...
Двигун, що працює на використанні архімедової сили (“двигун архімеда”)
Номер патенту: 2912
Опубліковано: 15.09.2004
Автор: Турлаков Петро Петрович
МПК: F04B 23/00
Мітки: двигун, працює, архімедової, архімеда, використанні, сили
Формула / Реферат:
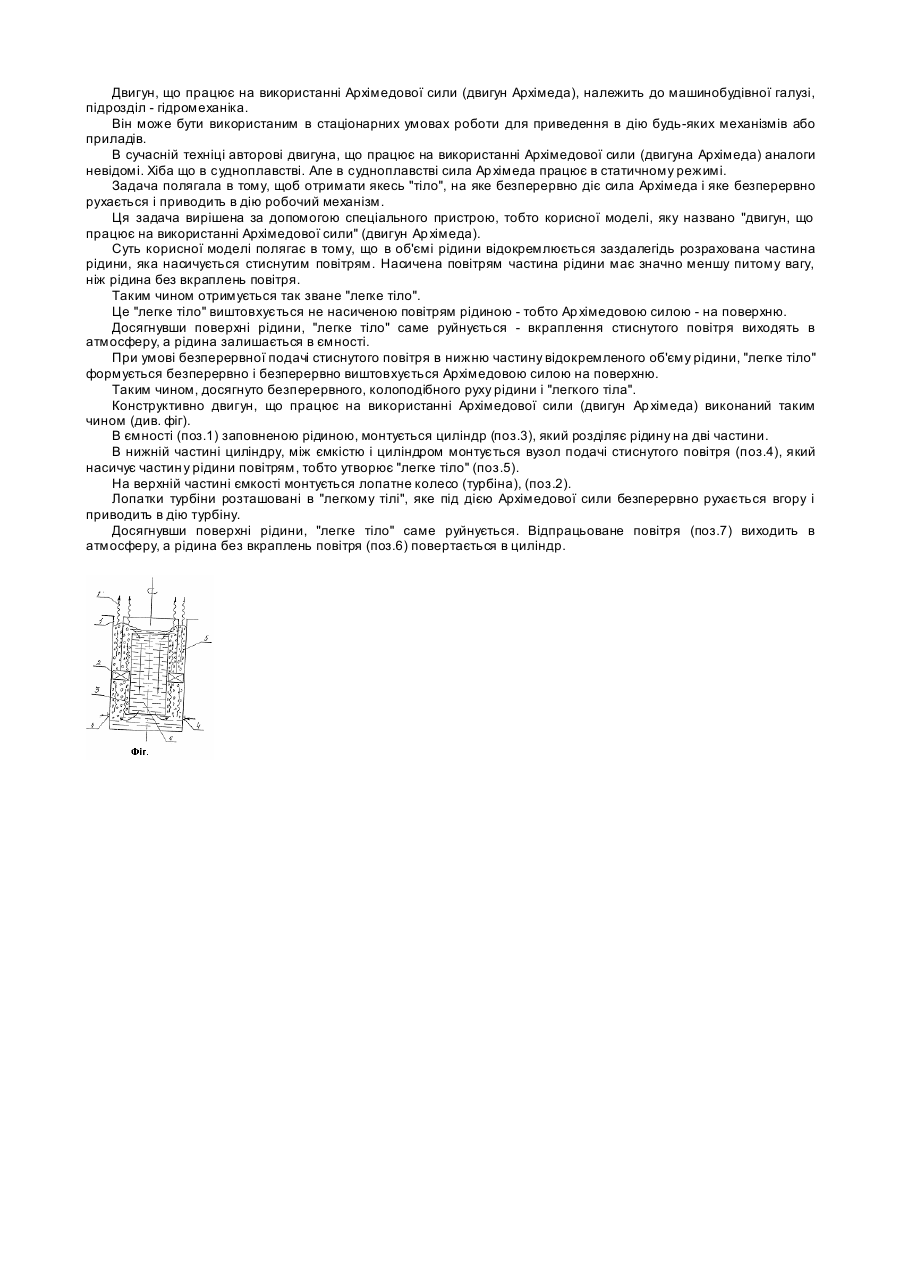
Двигун, що працює на використанні Архімедової сили, який містить ємність, заповнену рідиною, циліндр, в нижній частині якого, між ємністю і циліндром розташований вузол подачі стиснутого повітря, а в верхній - між ємністю та циліндром, розташоване лопатеве колесо (турбіна) для відбору Архімедової сили, яка діє на центр ваги "легкого тіла", яке утворюється між стінками ємності і циліндра завдяки насиченню рідини стиснутим...
Колекторний електричний двигун
Номер патенту: 50300
Опубліковано: 15.10.2002
Автор: Горягін Володимир Федорович
МПК: H02K 16/00
Мітки: двигун, електричний, колекторний
Формула / Реферат:
Колекторний електричний двигун, що складається з статора, ротора, підшипникових щитів, колектора і струмознімного апарата, який відрізняється тим, що внутрішня порожнина двигуна заповнена рідиною, наприклад маслом.
Попередній патент: Поліморфні форми гідрохлориду 1-‘4-(5-ціаноіндол-3-іл)бутил-4-(2-карбамоїлбензофуран-5-іл)піперазину
Наступний патент: Піролопіримідини як інгібітори протеїнкінази
Випадковий патент: Спосіб відновлення зношених поверхонь стрілочних переводів