Цифрова система регулювання багатодвигуновим електроприводом
Номер патенту: 78140
Опубліковано: 11.03.2013
Автори: Калюжна Олена Вікторівна, Курцева Лілія Борисівна, Кузнецов Борис Іванович
Формула / Реферат
Цифрова система регулювання багатодвигуновим електроприводом, що містить датчик швидкості, першу та другу мікро-ЕОМ, цифро-аналоговий перетворювач, аналого-цифровий перетворювач, який відрізняється тим, що містить задавач швидкості, задавач натягу і цифровий блок, який через суматор швидкості, підключений до електроприводного каналу швидкості обертання вала з урахуванням пружних елементів за швидкістю і по куту скручування вала, який містить привідний електродвигун, вихід якого підключений до негативного входу суматора швидкості, редуктор, привідний механізм, вихід якого підключений до першого входу суматору, гальмувального каналу, який містить підсилювач потужності, гальмувальний електродвигун, гальмувальний механізм, вихід якого підключений до другого входу суматора, вихід якого через інтегратор натягу з'єднаний з входом датчика натягу, підключений до входу аналого-цифрового перетворювача, вихід якого з'єднаний з негативним входом цифрового суматора натягу, вихід якого сполучений з входом другої мікро-ЕОМ, яка передає сигнал другому цифро-аналоговому перетворювачу, вихід якого з'єднаний з позитивним входом суматору натягу.
Текст
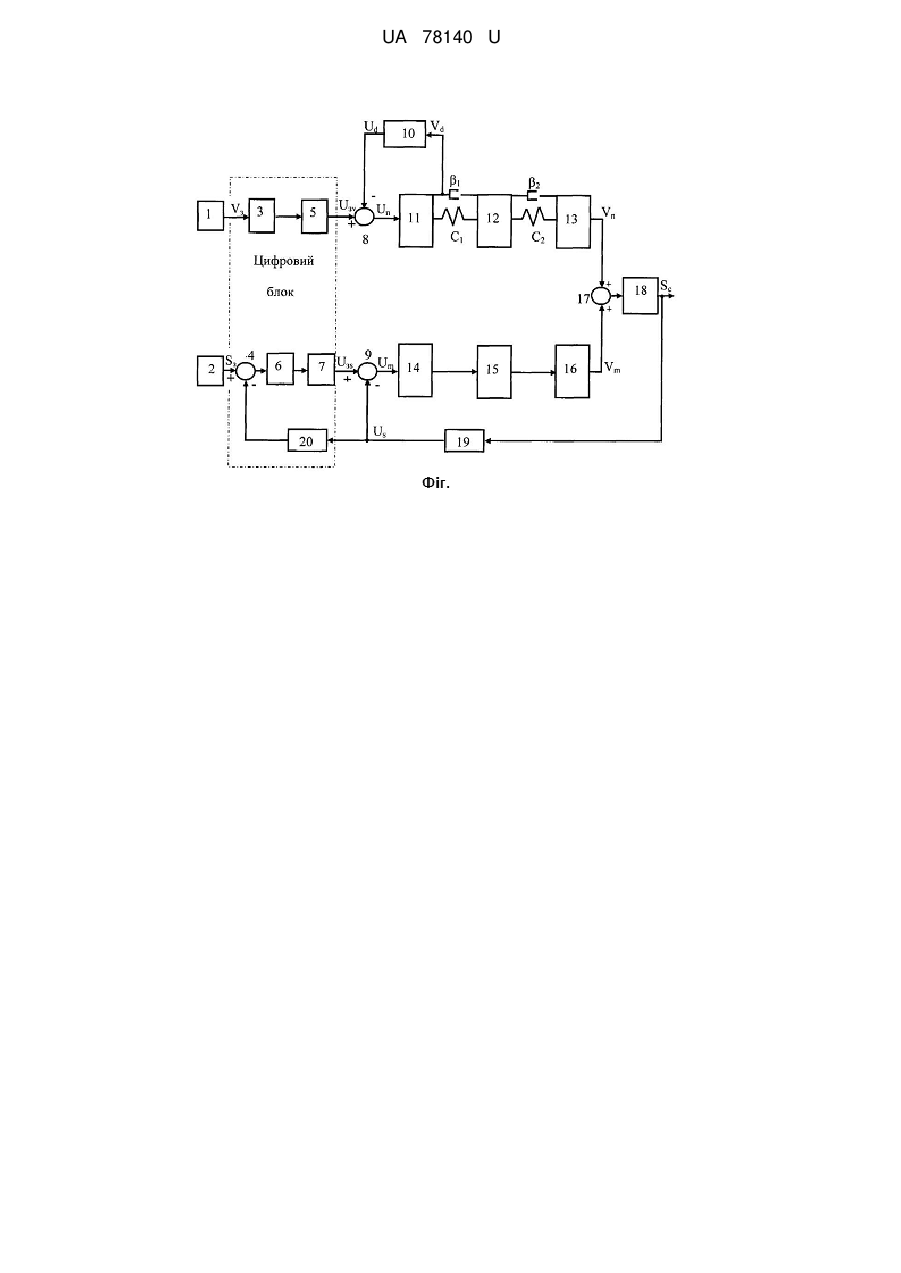
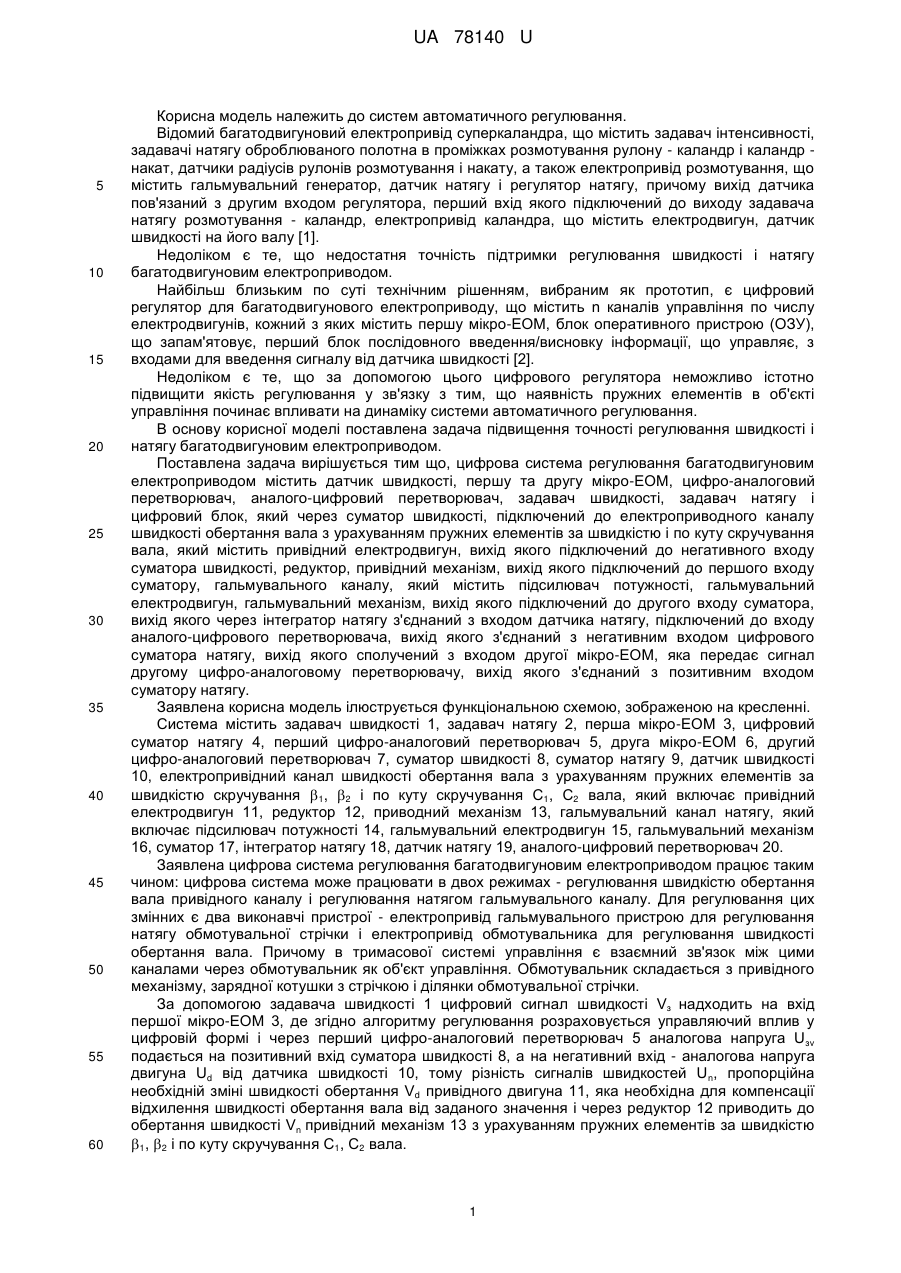
Реферат: UA 78140 U UA 78140 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до систем автоматичного регулювання. Відомий багатодвигуновий електропривід суперкаландра, що містить задавач інтенсивності, задавачі натягу оброблюваного полотна в проміжках розмотування рулону - каландр і каландр накат, датчики радіусів рулонів розмотування і накату, а також електропривід розмотування, що містить гальмувальний генератор, датчик натягу і регулятор натягу, причому вихід датчика пов'язаний з другим входом регулятора, перший вхід якого підключений до виходу задавача натягу розмотування - каландр, електропривід каландра, що містить електродвигун, датчик швидкості на його валу [1]. Недоліком є те, що недостатня точність підтримки регулювання швидкості і натягу багатодвигуновим електроприводом. Найбільш близьким по суті технічним рішенням, вибраним як прототип, є цифровий регулятор для багатодвигунового електроприводу, що містить n каналів управління по числу електродвигунів, кожний з яких містить першу мікро-ЕОМ, блок оперативного пристрою (ОЗУ), що запам'ятовує, перший блок послідовного введення/висновку інформації, що управляє, з входами для введення сигналу від датчика швидкості [2]. Недоліком є те, що за допомогою цього цифрового регулятора неможливо істотно підвищити якість регулювання у зв'язку з тим, що наявність пружних елементів в об'єкті управління починає впливати на динаміку системи автоматичного регулювання. В основу корисної моделі поставлена задача підвищення точності регулювання швидкості і натягу багатодвигуновим електроприводом. Поставлена задача вирішується тим що, цифрова система регулювання багатодвигуновим електроприводом містить датчик швидкості, першу та другу мікро-ЕОМ, цифро-аналоговий перетворювач, аналого-цифровий перетворювач, задавач швидкості, задавач натягу і цифровий блок, який через суматор швидкості, підключений до електроприводного каналу швидкості обертання вала з урахуванням пружних елементів за швидкістю і по куту скручування вала, який містить привідний електродвигун, вихід якого підключений до негативного входу суматора швидкості, редуктор, привідний механізм, вихід якого підключений до першого входу суматору, гальмувального каналу, який містить підсилювач потужності, гальмувальний електродвигун, гальмувальний механізм, вихід якого підключений до другого входу суматора, вихід якого через інтегратор натягу з'єднаний з входом датчика натягу, підключений до входу аналого-цифрового перетворювача, вихід якого з'єднаний з негативним входом цифрового суматора натягу, вихід якого сполучений з входом другої мікро-ЕОМ, яка передає сигнал другому цифро-аналоговому перетворювачу, вихід якого з'єднаний з позитивним входом суматору натягу. Заявлена корисна модель ілюструється функціональною схемою, зображеною на кресленні. Система містить задавач швидкості 1, задавач натягу 2, перша мікро-ЕОМ 3, цифровий суматор натягу 4, перший цифро-аналоговий перетворювач 5, друга мікро-ЕОМ 6, другий цифро-аналоговий перетворювач 7, суматор швидкості 8, суматор натягу 9, датчик швидкості 10, електропривідний канал швидкості обертання вала з урахуванням пружних елементів за швидкістю скручування 1, 2 і по куту скручування С1, С2 вала, який включає привідний електродвигун 11, редуктор 12, приводний механізм 13, гальмувальний канал натягу, який включає підсилювач потужності 14, гальмувальний електродвигун 15, гальмувальний механізм 16, суматор 17, інтегратор натягу 18, датчик натягу 19, аналого-цифровий перетворювач 20. Заявлена цифрова система регулювання багатодвигуновим електроприводом працює таким чином: цифрова система може працювати в двох режимах - регулювання швидкістю обертання вала привідного каналу і регулювання натягом гальмувального каналу. Для регулювання цих змінних є два виконавчі пристрої - електропривід гальмувального пристрою для регулювання натягу обмотувальної стрічки і електропривід обмотувальника для регулювання швидкості обертання вала. Причому в тримасової системі управління є взаємний зв'язок між цими каналами через обмотувальник як об'єкт управління. Обмотувальник складається з привідного механізму, зарядної котушки з стрічкою і ділянки обмотувальної стрічки. За допомогою задавача швидкості 1 цифровий сигнал швидкості Vз надходить на вхід першої мікро-ЕОМ 3, де згідно алгоритму регулювання розраховується управляючий вплив у цифровій формі і через перший цифро-аналоговий перетворювач 5 аналогова напруга Uзv подається на позитивний вхід суматора швидкості 8, а на негативний вхід - аналогова напруга двигуна Ud від датчика швидкості 10, тому різність сигналів швидкостей U n, пропорційна необхідній зміні швидкості обертання Vd привідного двигуна 11, яка необхідна для компенсації відхилення швидкості обертання вала від заданого значення і через редуктор 12 приводить до обертання швидкості Vn привідний механізм 13 з урахуванням пружних елементів за швидкістю 1, 2 і по куту скручування С1, С2 вала. 1 UA 78140 U 5 10 15 Виміряна за допомогою датчика натягу 19 аналогова напруга U s через аналого-цифровий перетворювач АЦП 20 поступає на негативний вхід цифрового суматора натягу 4, а на позитивний вхід - цифровий сигнал натягу Sз від задавача натягу 2. Вихідний сигнал цифрового суматора натягу 4 передається на вхід другої мікро-ЕОМ 6, де згідно алгоритму регулювання формується цифровий сигнал, пропорційний відхиленню натягу гальмувального каналу від заданого, і передається на другий цифро-аналоговий перетворювач 7, де формується аналоговий сигнал напруги натягу Uзs і діє на позитивний вхід суматора натягу 9. З виходу суматора натягу 9 аналоговий сигнал Um через підсилювач потужності 14 приводить до обертання гальмувальний електродвигун 15 і гальмувальний механізм 16. Швидкість Vп приводного механізму 13 і швидкість V m гальмувального механізму 16 складується у суматорі 17 і через інтегратор натягу 18 поступає по негативному зворотному зв'язку на вхід датчика натягу 19. Тому у цифровій системі регулювання одночасно підтримується натяг стрічки Sc як у режимі розгону - гальмуванню, так і при сталій швидкості обертання. Постійність натягу стрічки Sc визначає необхідну щільність намотування стрічок. Таким чином, побудована корисна модель дозволяє збільшити точність регулювання швидкості і натягу стрічки багатодвигуновим електроприводом. Джерела інформації: 1. Авторське свідоцтво РФ № 2131641, кл. Н02Р5/46, Н02Р5/48, 1999. 2. Авторське свідоцтво РФ № 2071635, кл. Н02Р5/46, G05B11/26, 1997. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 Цифрова система регулювання багатодвигуновим електроприводом, що містить датчик швидкості, першу та другу мікро-ЕОМ, цифро-аналоговий перетворювач, аналого-цифровий перетворювач, який відрізняється тим, що містить задавач швидкості, задавач натягу і цифровий блок, який через суматор швидкості, підключений до електроприводного каналу швидкості обертання вала з урахуванням пружних елементів за швидкістю і по куту скручування вала, який містить привідний електродвигун, вихід якого підключений до негативного входу суматора швидкості, редуктор, привідний механізм, вихід якого підключений до першого входу суматору, гальмувального каналу, який містить підсилювач потужності, гальмувальний електродвигун, гальмувальний механізм, вихід якого підключений до другого входу суматора, вихід якого через інтегратор натягу з'єднаний з входом датчика натягу, підключений до входу аналого-цифрового перетворювача, вихід якого з'єднаний з негативним входом цифрового суматора натягу, вихід якого сполучений з входом другої мікро-ЕОМ, яка передає сигнал другому цифро-аналоговому перетворювачу, вихід якого з'єднаний з позитивним входом суматору натягу. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital system for multi-motor electric drive control
Автори англійськоюKuznetsov Borys Ivanovych, Kurtseva Lilia Borysivna, Kaliuzhna Olena Viktorivna
Назва патенту російськоюЦифровая система регулирования многодвигательного электропривода
Автори російськоюКузнецов Борис Иванович, Курцева Лилия Борисовна, Калюжная Елена Викторовна
МПК / Мітки
МПК: H02P 5/46
Мітки: цифрова, багатодвигуновим, система, електроприводом, регулювання
Код посилання
<a href="https://ua.patents.su/4-78140-cifrova-sistema-regulyuvannya-bagatodvigunovim-elektroprivodom.html" target="_blank" rel="follow" title="База патентів України">Цифрова система регулювання багатодвигуновим електроприводом</a>
Аналого-цифрова приймальна система
Номер патенту: 21890
Опубліковано: 10.04.2007
Автори: Крупінов Юрій Олександрович, Мейстер Юрій Лазаревич, Траілін Вячеслав Федорович
МПК: G01S 7/285
Мітки: система, аналого-цифрова, приймальна
Формула / Реферат:
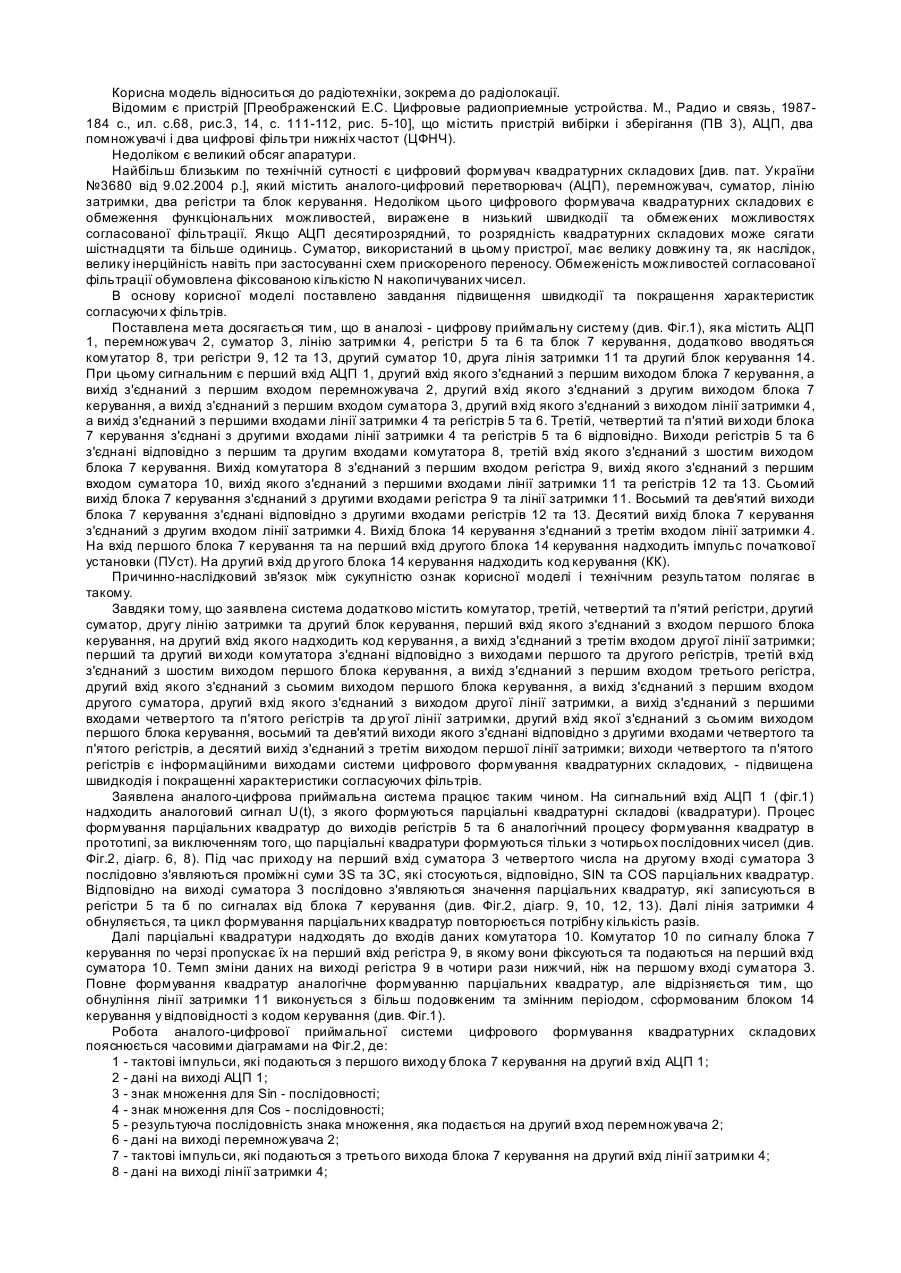
Аналого-цифрова приймальна система, яка містить аналого-цифровий перетворювач, на перший вхід якого надходить вхідний сигнал, а вихід з'єднаний відповідно з першим входом перемножувача, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний відповідно з першими входами першої лінії затримки, першого та другого регістрів; імпульс початкової установки надходить на вхід першого блока керування, перший, другий, третій,...
Цифрова система компенсації активних завад
Номер патенту: 19756
Опубліковано: 15.12.2006
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Лаврентьєв Володимир Миколайович, Каспирович Олександр Геннадійович
МПК: G01S 7/36
Мітки: компенсації, завад, активних, система, цифрова
Формула / Реферат:
Цифрова система компенсації активних завад, що містить основний і допоміжний входи, основний і допоміжний блоки фазових фільтрів, кожний з яких містить по п фільтрів, основний і допоміжний комутатори, блок обчислення вагового коефіцієнта, основний і допоміжний блоки запам`ятовуючого пристрою (ЗП), суматор, помножувач, при цьому основний вхід системи підключений до входів основного блока фазових фільтрів і до входу основного блока ЗП, вихід...
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 58183
Опубліковано: 15.07.2003
Автори: Часовський Валентин Олександрович, Чорнобородова Наталя Петрівна, Чорнобородов Михайло Петрович
МПК: G01S 7/36
Мітки: компенсації, система, несинхронних, цифрова, завад, імпульсних
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, що містить запам'ятовуючий пристрій, вхід якого з'єднаний з входом системи і входом блока фазових фільтрів, вхід якого також приєднаний до входу системи, а його вихід приєднаний до його ж входу, блок виявлення та обчислення параметрів несинхронної імпульсної завади, основний вихід якого приєднаний до другого входу суматора, перший вхід якого приєднаний до виходу запам'ятовуючого...
Багатодвигуновий електропривід паперообмотувальної машини
Номер патенту: 71098
Опубліковано: 10.07.2012
Автори: Лутай Сергій Миколайович, Кушнаренко Олексій Вікторович, Кузнецов Борис Іванович, Курцева Лілія Борисівна
МПК: H02P 5/46
Мітки: машини, електропривід, паперообмотувальної, багатодвигуновий
Формула / Реферат:
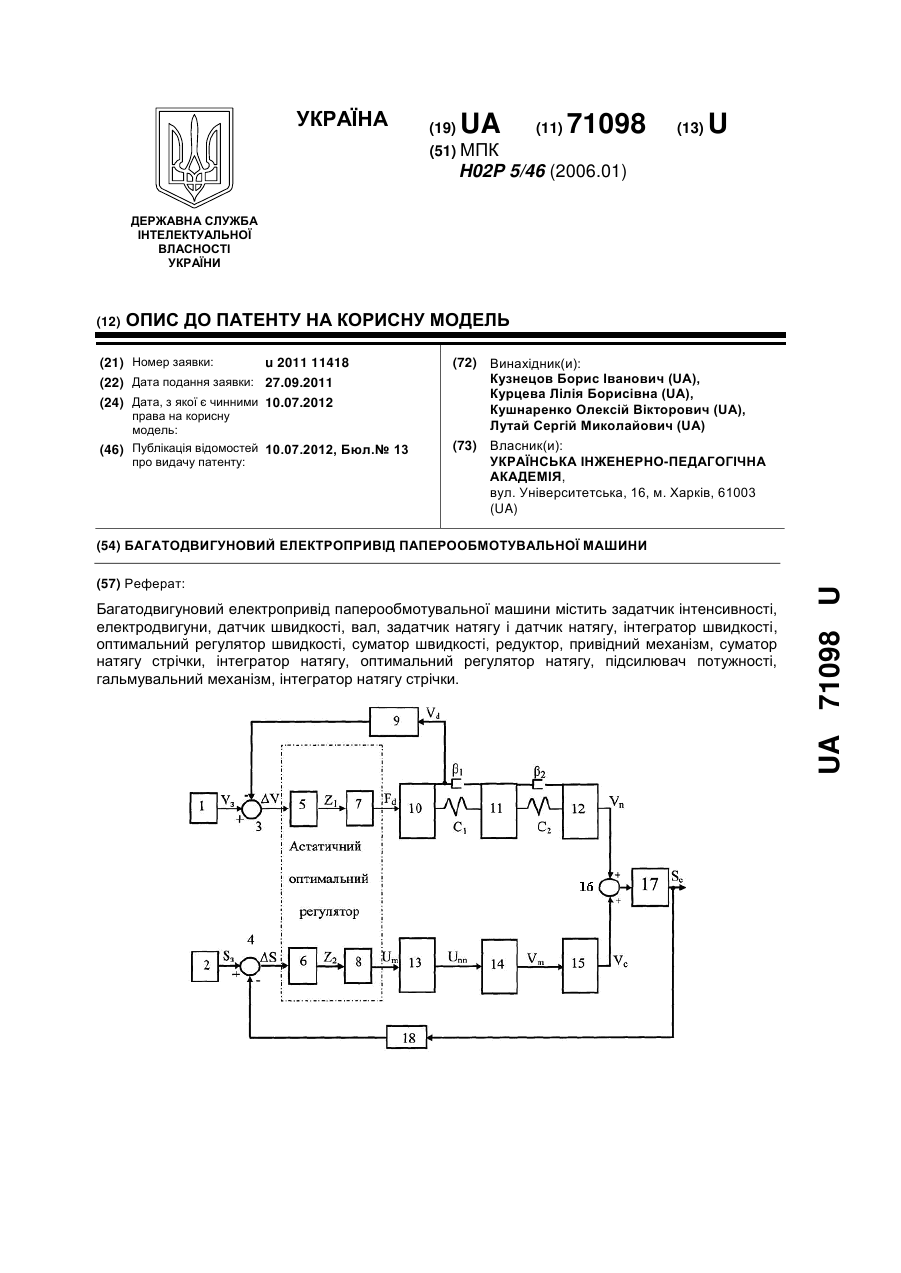
Багатодвигуновий електропривід паперообмотувальної машини містить задатчик інтенсивності, електродвигун, датчик швидкості на його валу, задатчик натягу і датчик натягу, який відрізняється тим, що введений блок астатичного оптимального регулятора, який містить інтегратор швидкості, оптимальний регулятор швидкості, вихід якого з'єднаний з першим входом електропривідного каналу швидкості обертання вала з урахуванням пружних елементів за...
Пристрій для керування асинхронним електроприводом
Номер патенту: 70074
Опубліковано: 15.09.2004
Автори: Фірсов Сергій Миколайович, Лученко Олег Олексійович, Нарожний Віталій Васильович, Гісцова Тетяна Іванівна, Кулік Анатолій Степанович
МПК: H02P 21/00
Мітки: пристрій, асинхронним, керування, електроприводом
Формула / Реферат:
Пристрій для керування асинхронним електроприводом, що складається з асинхронного двигуна, з'єднаного через пружну передачу з виконавчим механізмом, послідовно з'єднаних між собою регулятора швидкості, перетворювача координат і перетворювача енергії, вихід якого підключений до статорної обмотки асинхронного двигуна, датчика кута, механічно зв'язаного з ротором асинхронного двигуна, задатчика реактивного струму, вихід якого підключений до...
Попередній патент: Пристрій для одержання когерентного оптичного випромінювання
Наступний патент: Пристрій для додавання та множення чисел за модулем три в модулярній системі числення
Випадковий патент: Високоміцний чавун для тонкостінних виливків