Цифрова система компенсації активних завад
Номер патенту: 19756
Опубліковано: 15.12.2006
Автори: Лаврентьєв Володимир Миколайович, Каспирович Олександр Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ

Формула / Реферат
Цифрова система компенсації активних завад, що містить основний і допоміжний входи, основний і допоміжний блоки фазових фільтрів, кожний з яких містить по п фільтрів, основний і допоміжний комутатори, блок обчислення вагового коефіцієнта, основний і допоміжний блоки запам`ятовуючого пристрою (ЗП), суматор, помножувач, при цьому основний вхід системи підключений до входів основного блока фазових фільтрів і до входу основного блока ЗП, вихід якого підключений до компенсованого входу суматора, вихід якого є виходом системи, а у свою чергу до компенсованого входу суматора підключений вихід помножувача, перший вхід якого підключений до виходу допоміжного блока ЗП, вхід якого підключений до допоміжного входу системи і входам фільтрів допоміжного блока фазових фільтрів, виходи основного і допоміжного комутаторів підключені відповідно до основного і допоміжного входів блока обчислення вагового коефіцієнта, яка відрізняється тим, що додатково містить основний і допоміжний блоки формування груп фільтрів; блок обчислення коефіцієнта кореляції, що містить вихід, основний і допоміжний входи; блок вибору максимального коефіцієнта кореляції, що містить вхід і вихід; блок вибору оптимального вагового коефіцієнта, що містить вихід, основний і керуючий входи, при цьому n входів основного і допоміжного блоків формування груп фільтрів підключені до виходів відповідних фільтрів відповідно основного і допоміжного блоків фазових фільтрів, a m виходів блоків формування груп фільтрів підключені до відповідних входів, відповідно, основного і допоміжного комутаторів, виходи яких підключені до відповідних входів блока обчислення коефіцієнта кореляції, вихід якого підключено до входу блока вибору максимального коефіцієнта кореляції, вихід якого підключено до керуючого входу блока вибору оптимального вагового коефіцієнта, до основного входу якого підключений вихід блока обчислення вагового коефіцієнта, а до виходу підключений другий вхід помножувача.
Текст
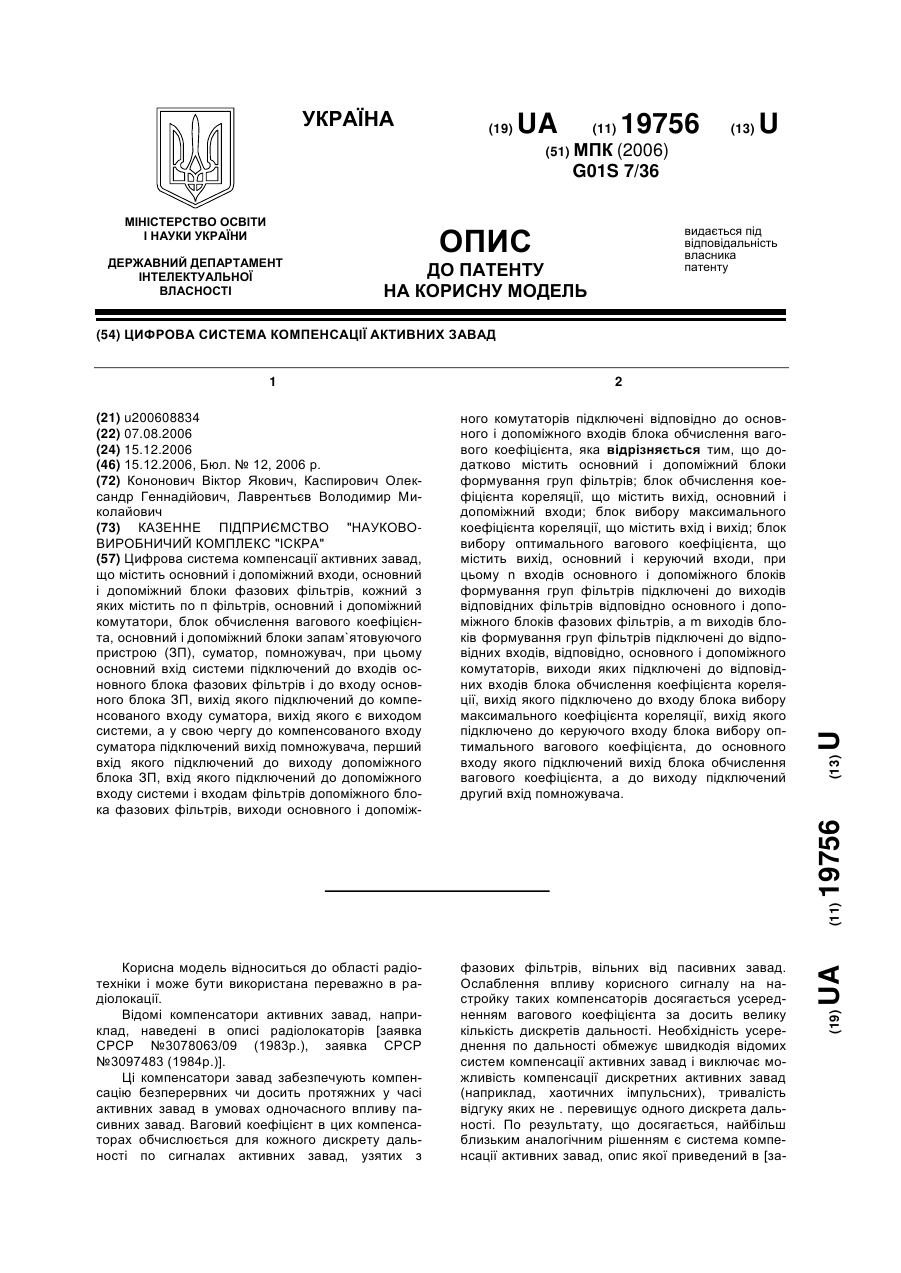
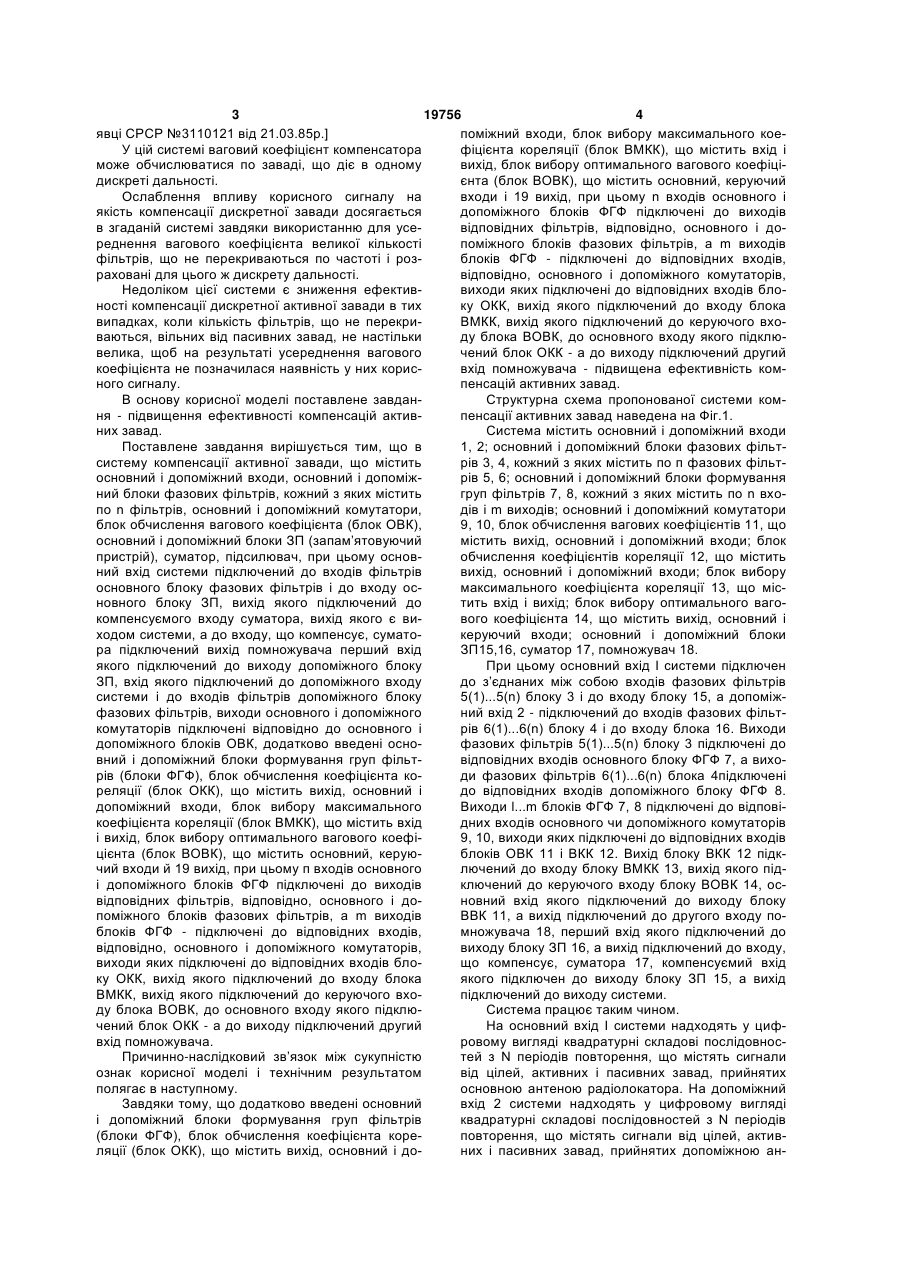
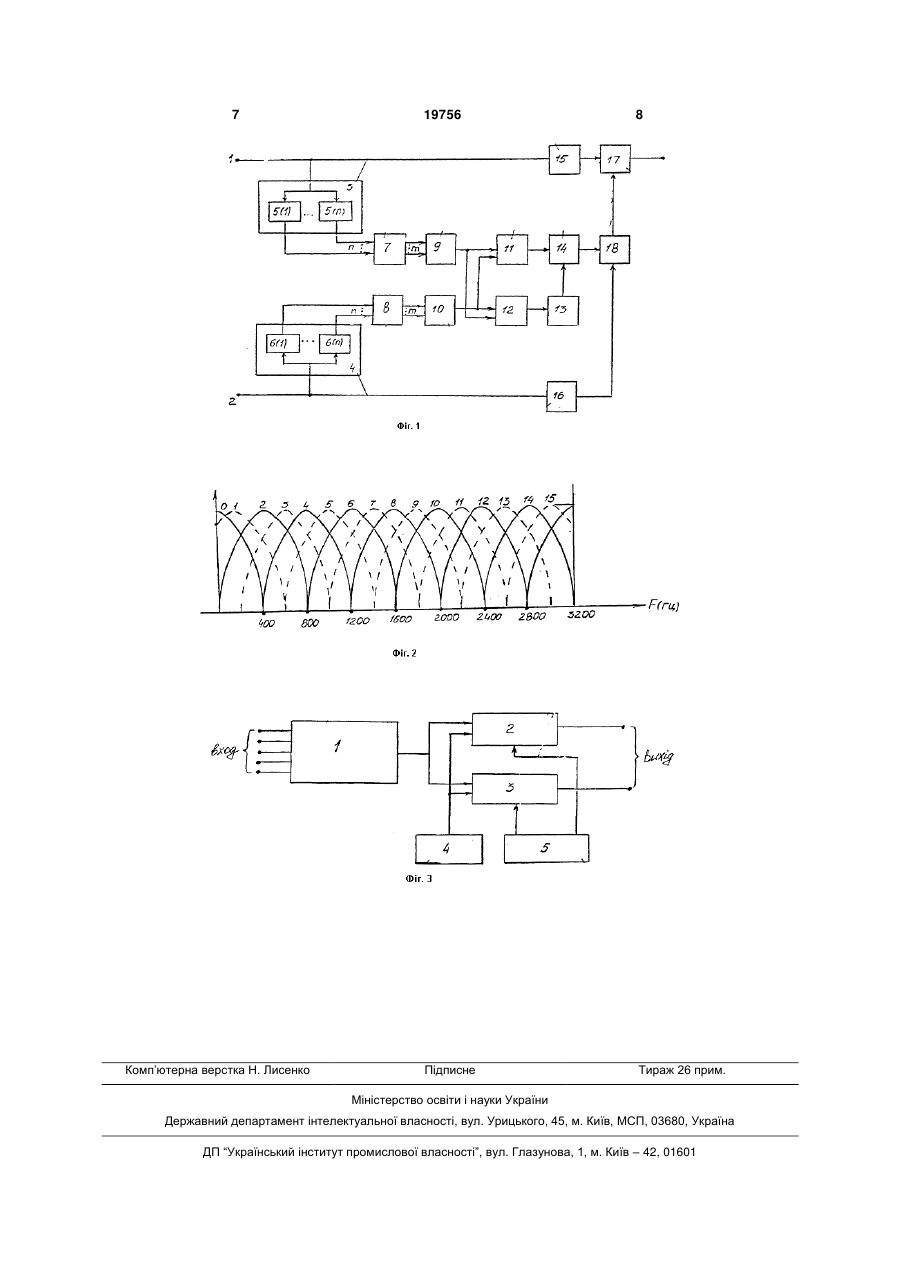
Цифрова система компенсації активних завад, що містить основний і допоміжний входи, основний і допоміжний блоки фазових фільтрів, кожний з яких містить по п фільтрів, основний і допоміжний комутатори, блок обчислення вагового коефіцієнта, основний і допоміжний блоки запам`ятовуючого пристрою (ЗП), суматор, помножувач, при цьому основний вхід системи підключений до входів основного блока фазових фільтрів і до входу основного блока ЗП, вихід якого підключений до компенсованого входу суматора, вихід якого є виходом системи, а у свою чергу до компенсованого входу суматора підключений вихід помножувача, перший вхід якого підключений до виходу допоміжного блока ЗП, вхід якого підключений до допоміжного входу системи і входам фільтрів допоміжного блока фазових фільтрів, виходи основного і допоміж U 2 (13) 1 3 19756 4 явці СРСР №3110121 від 21.03.85р.] поміжний входи, блок вибору максимального коеУ цій системі ваговий коефіцієнт компенсатора фіцієнта кореляції (блок ВМКК), що містить вхід і може обчислюватися по заваді, що діє в одному вихід, блок вибору оптимального вагового коефіцідискреті дальності. єнта (блок ВОВК), що містить основний, керуючий Ослаблення впливу корисного сигналу на входи і 19 вихід, при цьому n входів основного і якість компенсації дискретної завади досягається допоміжного блоків ФГФ підключені до виходів в згаданій системі завдяки використанню для усевідповідних фільтрів, відповідно, основного і дореднення вагового коефіцієнта великої кількості поміжного блоків фазових фільтрів, a m виходів фільтрів, що не перекриваються по частоті і розблоків ФГФ - підключені до відповідних входів, раховані для цього ж дискрету дальності. відповідно, основного і допоміжного комутаторів, Недоліком цієї системи є зниження ефективвиходи яких підключені до відповідних входів блоності компенсації дискретної активної завади в тих ку ОКК, вихід якого підключений до входу блока випадках, коли кількість фільтрів, що не перекриВМКК, вихід якого підключений до керуючого вховаються, вільних від пасивних завад, не настільки ду блока ВОВК, до основного входу якого підклювелика, щоб на результаті усереднення вагового чений блок ОКК - а до виходу підключений другий коефіцієнта не позначилася наявність у них корисвхід помножувача - підвищена ефективність комного сигналу. пенсацій активних завад. В основу корисної моделі поставлене завданСтруктурна схема пропонованої системи комня - підвищення ефективності компенсацій активпенсації активних завад наведена на Фіг.1. них завад. Система містить основний і допоміжний входи Поставлене завдання вирішується тим, що в 1, 2; основний і допоміжний блоки фазових фільтсистему компенсації активної завади, що містить рів 3, 4, кожний з яких містить по п фазових фільтосновний і допоміжний входи, основний і допоміжрів 5, 6; основний і допоміжний блоки формування ний блоки фазових фільтрів, кожний з яких містить груп фільтрів 7, 8, кожний з яких містить по n вхопо n фільтрів, основний і допоміжний комутатори, дів і m виходів; основний і допоміжний комутатори блок обчислення вагового коефіцієнта (блок ОВК), 9, 10, блок обчислення вагових коефіцієнтів 11, що основний і допоміжний блоки ЗП (запам’ятовуючий містить вихід, основний і допоміжний входи; блок пристрій), суматор, підсилювач, при цьому основобчислення коефіцієнтів кореляції 12, що містить ний вхід системи підключений до входів фільтрів вихід, основний і допоміжний входи; блок вибору основного блоку фазових фільтрів і до входу осмаксимального коефіцієнта кореляції 13, що місновного блоку ЗП, вихід якого підключений до тить вхід і вихід; блок вибору оптимального вагокомпенсуємого входу суматора, вихід якого є вивого коефіцієнта 14, що містить вихід, основний і ходом системи, а до входу, що компенсує, суматокеруючий входи; основний і допоміжний блоки ра підключений вихід помножувача перший вхід ЗП15,16, суматор 17, помножувач 18. якого підключений до виходу допоміжного блоку При цьому основний вхід І системи підключен ЗП, вхід якого підключений до допоміжного входу до з’єднаних між собою входів фазових фільтрів системи і до входів фільтрів допоміжного блоку 5(1)...5(n) блоку 3 і до входу блоку 15, а допоміжфазових фільтрів, виходи основного і допоміжного ний вхід 2 - підключений до входів фазових фільткомутаторів підключені відповідно до основного і рів 6(1)...6(n) блоку 4 і до входу блока 16. Виходи допоміжного блоків ОВК, додатково введені оснофазових фільтрів 5(1)...5(n) блоку 3 підключені до вний і допоміжний блоки формування груп фільтвідповідних входів основного блоку ФГФ 7, а вихорів (блоки ФГФ), блок обчислення коефіцієнта коди фазових фільтрів 6(1)...6(n) блока 4підключені реляції (блок ОКК), що містить вихід, основний і до відповідних входів допоміжного блоку ФГФ 8. допоміжний входи, блок вибору максимального Виходи l...m блоків ФГФ 7, 8 підключені до відповікоефіцієнта кореляції (блок ВМКК), що містить вхід дних входів основного чи допоміжного комутаторів і вихід, блок вибору оптимального вагового коефі9, 10, виходи яких підключені до відповідних входів цієнта (блок ВОВК), що містить основний, керуюблоків ОВК 11 і ВКК 12. Вихід блоку ВКК 12 підкчий входи й 19 вихід, при цьому п входів основного лючений до входу блоку ВМКК 13, вихід якого піді допоміжного блоків ФГФ підключені до виходів ключений до керуючого входу блоку ВОВК 14, освідповідних фільтрів, відповідно, основного і доновний вхід якого підключений до виходу блоку поміжного блоків фазових фільтрів, a m виходів ВВК 11, а вихід підключений до другого входу поблоків ФГФ - підключені до відповідних входів, множувача 18, перший вхід якого підключений до відповідно, основного і допоміжного комутаторів, виходу блоку ЗП 16, а вихід підключений до входу, виходи яких підключені до відповідних входів блощо компенсує, суматора 17, компенсуємий вхід ку ОКК, вихід якого підключений до входу блока якого підключен до виходу блоку ЗП 15, а вихід ВМКК, вихід якого підключений до керуючого вхопідключений до виходу системи. ду блока ВОВК, до основного входу якого підклюСистема працює таким чином. чений блок ОКК - а до виходу підключений другий На основний вхід І системи надходять у цифвхід помножувача. ровому вигляді квадратурні складові послідовносПричинно-наслідковий зв’язок між сукупністю тей з N періодів повторення, що містять сигнали ознак корисної моделі і технічним результатом від цілей, активних і пасивних завад, прийнятих полягає в наступному. основною антеною радіолокатора. На допоміжний Завдяки тому, що додатково введені основний вхід 2 системи надходять у цифровому вигляді і допоміжний блоки формування груп фільтрів квадратурні складові послідовностей з N періодів (блоки ФГФ), блок обчислення коефіцієнта кореповторення, що містять сигнали від цілей, активляції (блок ОКК), що містить вихід, основний і доних і пасивних завад, прийнятих допоміжною ан 5 19756 6 теною. Прийнята інформація надходить на входи системи; * відповідних блоків фазових фільтрів 3,4 і ЗП 15, Uдоп. - комплексно-сполучений сигнал допомі16. У блоках ЗП 15 і 16 відбувається запам’ятовування пакета інформації, що надходить, жного входу на час, необхідний для розрахунку і вибору вагосистеми; вих коефіцієнтів компенсатора для всіх дискретів Знак «–» - позначення усереднення. дальності. У блоках фазових фільтрів 3, 4 пакет При розрахунку К усереднення здійснюється вихідної інформації піддається доплеровській фіпо кількості фільтрів, що входять в одну групу. льтрації, наприклад, по алгоритму ШПФ (швидке У вищенаведеному прикладі для кожної з груп перетворення Фур’є). При цьому надалі викорисфільтрів ваговий коефіцієнт розраховується по 2-х товуються тільки фільтри, що не перекриваються фільтрах (4, 8; 4, 12; тощо). по частоті, у яких пасивні завади відсутні. НаприПаралельно з розрахунком K здійснюється клад, для вищенаведеного випадку, коли N=16, це розрахунок у блоці 12 коефіцієнта взаємної коребудуть фільтри 4, 8, 12 чи 6, 10. Активна завада, ляції (модуля) p для кожної з груп фільтрів відпочерез її широкополосність, буде присутня у всіх відно до формули: цих фільтрах, а корисний сигнал (ціль) розташується у фільтрі, що відповідає його доплеровській * частоті. Uocн Uдoп Сигнали з виходів блоків 3, 4 надходять на ; * входи відповідних блоків ФГФ 7 і 8. У блоках ФГФ Uocн Uдoп 7, 8 формуються сполучення по m усіляких, але не таких, що перекриваються по частоті, фільтрів. Ці - модуль коефіцієнта взаємної кореляції; групи по черзі надходять на вихід блоків 7, 8. Приклад реалізації блоку ФГФ для випадку інші позначення такі ж, що і для коефіцієнта N=16 і m=2 наведений на Фіг.3. K. Формувач груп фільтрів складається з регістра Наявність корисного сигналу приводить до пеІ, запам’ятовуючих пристроїв 2, 3, адресного лічирекрученої оцінки як коефіцієнта К, так і коефіцієнльника 4 і ПЗП адрес зчитування 5. На входи регіта кореляції. стра І надходить у паралельному вигляді инфорРозрахованні значення модуля коефіцієнта мація від 4, 6, 8, 10 і 12-го фільтрів. З виходу кореляції надходять у блок ВМКК 13, де здійснюрегістра І інформація надходить одночасно на ється порівняння поточних значень і вироблявходи ЗП 2 і ЗП 3. Запис інформації кожного з фіється ознака максимального значення цього коельтрів у ЗП 2 і ЗП 3 здійснюється послідовно, по фіцієнта для кожного дискрету дальності. Ця адресах, що формуються адресним лічильником 4. ознака (сигнал керування) подається на керуючий Зчитування інформації з ЗП 2 і ЗП 3 здійснюється вхід блоку ВОВК 14. У цьому блоці здійснюється в послідовності, зумовленій ПЗП адрес зчитування відбір для кожного дискрету дальності вагового 5, що, у свою чергу, керується адресним лічильникоефіцієнта, розрахованого по тій групі фільтрів, ком 4. Пристрій І у цьому блоці може бути виконадля якої коефіцієнт кореляції має найбільше знаний на мікросхемах 533ИР16; пристрої 2, 3 - на чення. 180ИР1, пристрій 4 на 533ИЕ7 і 5 - на 566РТ7. Для Інформація допоміжного каналу, після мнонашого прикладу на вихід блоку ФГФ будуть надження її на ваговий коефіцієнт у блоці 18, надхоходити по черзі пари фільтрів: 4, 8; 4, 10; 8, 12; 6, дить на компенсуючий вхід суматора 17, на компе10 і 6, 12. нсуємий вхід якого надходить відповідна Сигнали з блоків ФГФ 7, 8 надходять на входи інформація з виходу основного блоку ЗП 15. У сувідповідних комутаторів 9, 10. Комутатори 9, 10 маторі 17 відбувається компенсація завади в кожзабезпечують почергове підключення до входів нім дискреті дальності в кожнім з N зондувань. На блоків ОВК 11 і ОКК 12 однойменних фільтрів у вход суматора 17 надходить суміш корисних сигмежах кожної комбінації фільтрів. налів, пасивних завад і залишки скомпенсованих У блоці ОКК 11 обчислюється ваговий коефіціактивних завад. Ця суміш може піддаватися подаєнт окремо для кожної з груп фільтрів, що надхольшій когерентній обробці наступними пристроями дять через послідовно включені блоки 9, 10 з блорадіолокатора. ків ФГФ 7, 8. Обчислення вагового коефіцієнта Таким чином, запропоноване технічне рішення здійснюється відповідно з формулою: дозволяє підвищити ефективність компенсації * дискретних активних завад в умовах обмеженого Uocн Uдoп K пакета зондувальних сигналів, коли не може бути 2 U реалізована досить велика кількість доплеровських фільтрів, необхідних для ефективної роботи - комплексне значення вагового коефіціде K відомих систем. єнта; Uосн. - комплексний сигнал з основного входу 7 Комп’ютерна верстка Н. Лисенко 19756 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital system for compensating active interferences
Автори англійськоюKononovych Viktor Yakovych, Kaspyrovych Oleksandr Hennadiiovych, Lavrentiev Volodymyr Mykolaiovych
Назва патенту російськоюЦифровая система компенсации активных помех
Автори російськоюКононович Виктор Яковлевич, Каспирович Александр Геннадиевич, Лаврентьев Владимир Николаевич
МПК / Мітки
МПК: G01S 7/36
Мітки: компенсації, цифрова, активних, завад, система
Код посилання
<a href="https://ua.patents.su/4-19756-cifrova-sistema-kompensaci-aktivnikh-zavad.html" target="_blank" rel="follow" title="База патентів України">Цифрова система компенсації активних завад</a>
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 58183
Опубліковано: 15.07.2003
Автори: Часовський Валентин Олександрович, Чорнобородов Михайло Петрович, Чорнобородова Наталя Петрівна
МПК: G01S 7/36
Мітки: несинхронних, завад, цифрова, імпульсних, система, компенсації
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, що містить запам'ятовуючий пристрій, вхід якого з'єднаний з входом системи і входом блока фазових фільтрів, вхід якого також приєднаний до входу системи, а його вихід приєднаний до його ж входу, блок виявлення та обчислення параметрів несинхронної імпульсної завади, основний вихід якого приєднаний до другого входу суматора, перший вхід якого приєднаний до виходу запам'ятовуючого...
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 46625
Опубліковано: 15.05.2002
Автори: Чорнобородов Михайло Петрович, Часовський Валентин Олександрович
МПК: G01S 7/36
Мітки: цифрова, компенсації, завад, імпульсних, система, несинхронних
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, у якій використовується дворазове перетворення Фур'є для визначення параметрів несинхронної імпульсної завади, що містить запам'ятовуючий пристрій, вхід якого з'єднаний із входом системи, суматор, один із входів якого з'єднаний з виходом запам'ятовуючого пристрою, а вихід з'єднаний з виходом системи, блок фазових фільтрів, вхід якого з'єднаний із входом системи, яка відрізняється тим,...
Пристрій компенсації активних шумових завад
Номер патенту: 37868
Опубліковано: 15.12.2003
Автори: Лаврентьєв Володимир Миколайович, Немчин Олександр Федорович, Мирошниченко Михайло Іванович, Траілін Вячеслав Федорович, Каспирович Олександр Геннадійович, Падалко Віктор Григорович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ
МПК: G01S 7/36
Мітки: пристрій, компенсації, завад, активних, шумових
Формула / Реферат:
Пристрій компенсації активних шумових завад, що містить блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок помноження, блок віднімання, причому вихід лінії затримки додаткового каналу сполучений із першим входом блока помноження, вихід якого сполучений із першим входом блока віднімання, другий вхід блока віднімання підключений до виходу лінії затримки основного каналу, а вихід блока...
Пристрій компенсації активних шумових завад
Номер патенту: 38217
Опубліковано: 15.05.2001
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Луханін Михайло Іванович, Мирошниченко Михайло Іванович, Немчин Олександр Федорович, Каспирович Олександр Геннадійович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Геннадійович, Лаврентьєв Володимир Миколайович, Попов Олег Якович
МПК: G01S 7/36
Мітки: активних, завад, компенсації, шумових, пристрій
Формула / Реферат:
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід...
Пристрій адаптивної компенсації активних шумових завад
Номер патенту: 69127
Опубліковано: 16.08.2004
Автор: Головань Артур Вячеславович
МПК: G01S 7/36
Мітки: активних, шумових, пристрій, адаптивної, компенсації, завад
Формула / Реферат:
Пристрій адаптивної компенсації активних шумових завад, що включає антенну систему, яка містить 2N антенних елементів з взаємно ортогональною поляризацією, два канали, один з яких зв'язаний з антенними елементами вертикальної поляризації, а другий - з елементами горизонтальної поляризації, канали розділені на N підканалів, кожний з яких містить ваговий підсилювач, вхід якого підключений до виходу антенного елементу і до входу корелятора, а...
Попередній патент: Спосіб моніторингу тиску в жовчовивідних шляхах
Наступний патент: Газовий пальник
Випадковий патент: Пристрій стабілізації дуги