Датчик зенітного і візирного кутів
Номер патенту: 78852
Опубліковано: 10.04.2013
Автори: Живцова Людмила Іванівна, Ковшов Геннадій Миколайович, Рижков Ігор Вікторович


Формула / Реферат
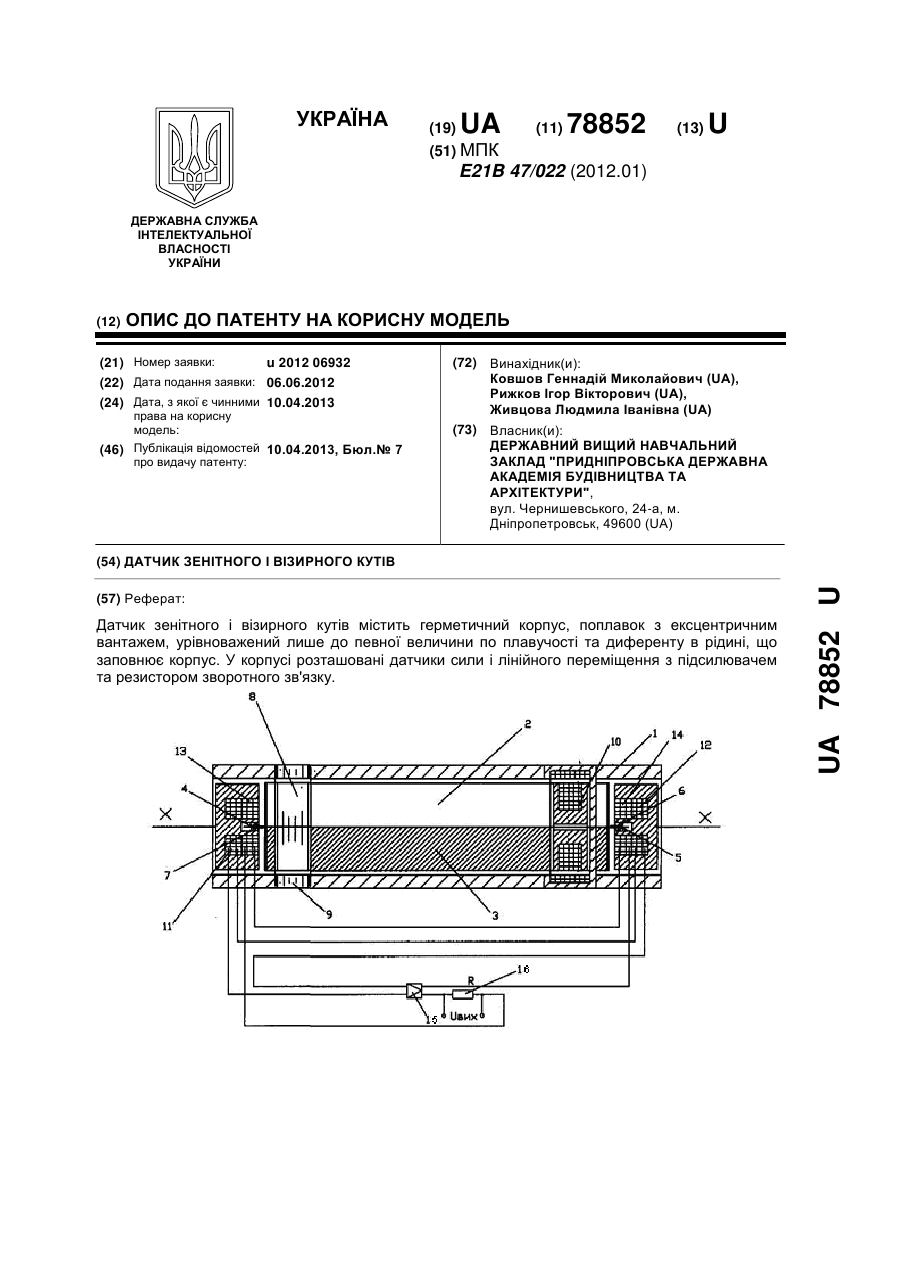
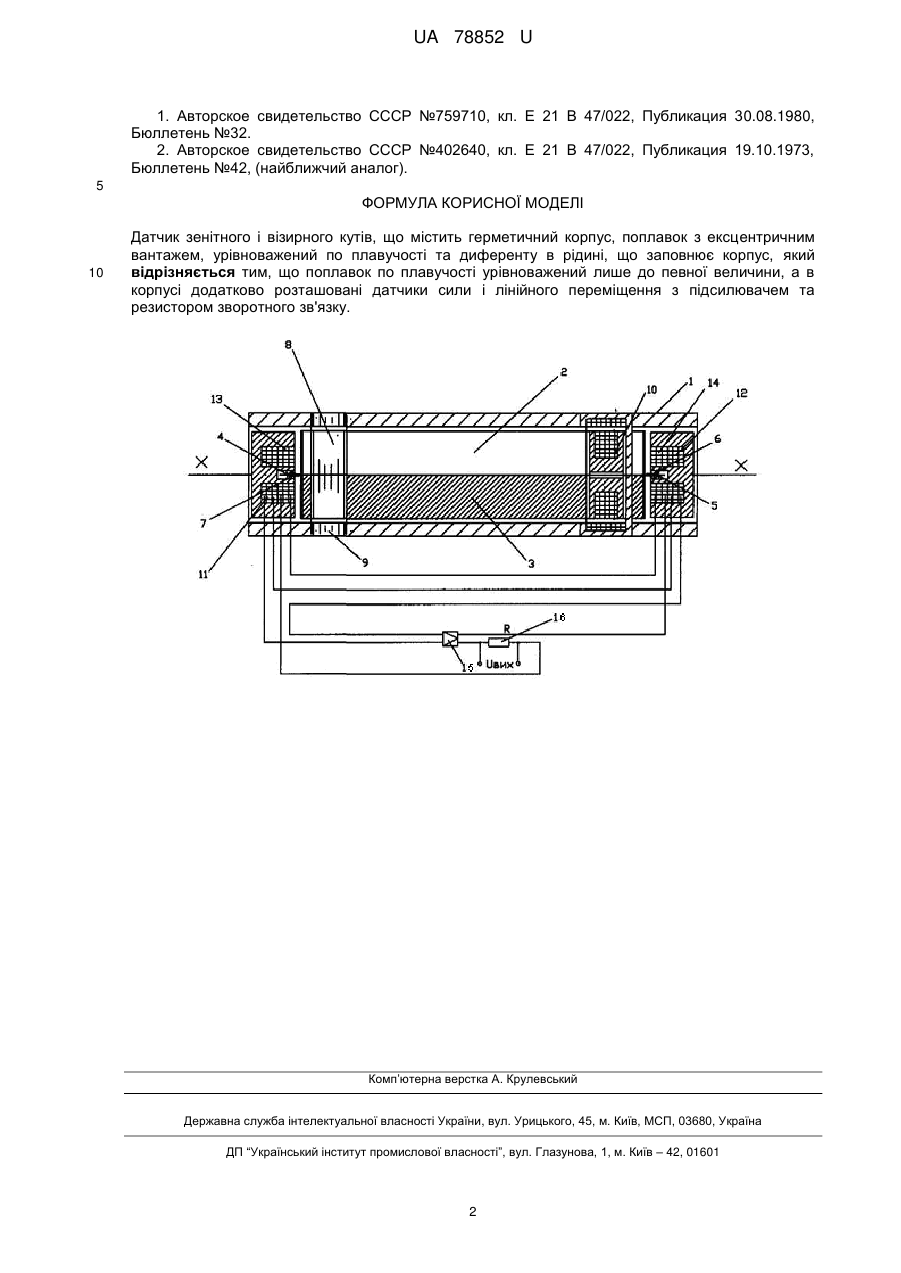
Датчик зенітного і візирного кутів, що містить герметичний корпус, поплавок з ексцентричним вантажем, урівноважений по плавучості та диференту в рідині, що заповнює корпус, який відрізняється тим, що поплавок по плавучості урівноважений лише до певної величини, а в корпусі додатково розташовані датчики сили і лінійного переміщення з підсилювачем та резистором зворотного зв'язку.
Текст
Реферат: Датчик зенітного і візирного кутів містить герметичний корпус, поплавок з ексцентричним вантажем, урівноважений лише до певної величини по плавучості та диференту в рідині, що заповнює корпус. У корпусі розташовані датчики сили і лінійного переміщення з підсилювачем та резистором зворотного зв'язку. UA 78852 U (54) ДАТЧИК ЗЕНІТНОГО І ВІЗИРНОГО КУТІВ UA 78852 U UA 78852 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до галузі промислової геофізики і може бути використана для контролю просторового положення стовбура свердловини в процесі буріння нафтових і газових свердловин. Відомий пристрій для визначення кривизни свердловини, що містить корпус, поплавкову рамку, виконану у вигляді встановлених з зазором концентрично один до одного циліндрів, внутрішній з яких жорстко пов'язаний з корпусом пристрою [1]. Недоліком такого пристрою є недостатня точність при вимірі малих зенітних кутів. Найбільш близьким технічним рішенням до даного запропонованого датчика зенітного і візирного кутів, є пристрій для визначення кривизни свердловини, що містить герметичний корпус, рамку - поплавок з ексцентричним вантажем, при цьому поплавок урівноважений в рідині, що заповнює корпус, по плавучості і диференту [2]. Недоліком даного пристрою є складність конструкції і отже невисока надійність при контролі викривлення свердловини в процесі буріння. Задача корисної моделі полягає у спрощенні конструкції датчика зенітного і візирного кутів, підвищення точності і надійності датчика. Поставлена задача вирішується, тим що в датчику зенітного і візирного кутів, який містить герметичний корпус, поплавок з ексцентричним вантажем, урівноважений по плавучості та диференту в рідині, що заповнює корпус, відповідно до корисної моделі, поплавок по плавучості урівноважений лише до певної величини, а в корпусі додатково розташовані датчики сили і лінійного переміщення, з підсилювачем та резистором зворотного зв'язку. Суть пропонованої корисної моделі пояснюється графічним матеріалом, де зображено загальний вигляд датчика зенітного і візирного кутів - вертикальний розріз. Датчик зенітного і візирного кутів містить герметичний циліндричний корпус 1, в якому у рідині розміщений чутливий елемент, виконаний у вигляді поплавка 2, який урівноважений у рідині по плавучості та диференту, причому по плавучості - лише до певної величини. Також центр ваги поплавка зміщений відносно осі хх ексцентричним вантажем 3. У центрі поплавка закріплені осі 4, 5, що входять в крізні отвори - бушони 6, 7, які дозволяють не тільки забезпечити кутовий поворот поплавка навколо осі хх, а й лінійний зсув поплавка уздовж її осі на величину 0,5 мм. Між поплавком 2 і корпусом 1 датчика передбачений малий демпфуючий зазор, що дорівнює 0,1-0,2 мм. Кут повороту поплавка навколо осі хх вимірюється синусно-косинусним обертовим трансформатором (СКОТ), ротор 8 якого закріплений у поплавку, а статор 9 - у корпусі. Підведення живлення до СКОТ здійснюється за допомогою обертового трансформатора 10. У корпусі датчика розташовані безконтактні датчики лінійного переміщення 11, 12 і сили 13, 14, з підсилювачем 15 та резистором 16 зворотного зв'язку. Датчик візирного кута працює таким чином. Нехай датчик розташований в горизонтальній площині. Якщо корпус 1 приладу відхилити від горизонталі, то завдяки ексцентричному вантажу 3 з'явиться сила, яка повертає поплавок 2 навколо осі хх. При цьому зі статора 9 електричного перетворювача знімається електричний сигнал, пропорційний куту повороту поплавка навколо осі хх, рівний куту установки відхилювача. Переміщення поплавка 2 вздовж осі хх здійснюється завдяки ексцентричному вантажу 3, який зміщує поплавок, урівноважений у рідині по плавучості лише до певної величини, що дає змогу лінійному зсуву поплавка уздовж осі хх і на виході безконтактних датчиків переміщення 11, 12 з'являється електричний сигнал, який після посилення 15 та перетворення подається на обмотки безконтактних датчиків сили 13, 14, які повертають поплавок у вихідне положення. Напруга на резисторі 16 зворотного зв'язку пропорційна зенітному куту. U i U0 i Um i cos g, xx де U0 i - нульовий сигнал датчика зенітного кута. 50 55 Um i - найбільше значення вихідного сигналу з датчика зенітного кута. Датчики кута повороту вибрані такими, щоб невеликий лінійний зсув не позначався на точності кута повороту. Малий демпфуючий зазор, між поплавком і корпусом сприяє ефективному демпфуванню коливань, а також знижує ударні навантаження, що діють на опори в процесі буріння. Таким чином, конструктивні особливості виконання датчика забезпечує суттєве підвищення точності вимірювання при малих зенітних кутах та надійність експлуатації датчика в процесі буріння. Джерела інформації: 1 UA 78852 U 1. Авторское свидетельство СССР №759710, кл. Ε 21 В 47/022, Публикация 30.08.1980, Бюллетень №32. 2. Авторское свидетельство СССР №402640, кл. Ε 21 В 47/022, Публикация 19.10.1973, Бюллетень №42, (найближчий аналог). 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 Датчик зенітного і візирного кутів, що містить герметичний корпус, поплавок з ексцентричним вантажем, урівноважений по плавучості та диференту в рідині, що заповнює корпус, який відрізняється тим, що поплавок по плавучості урівноважений лише до певної величини, а в корпусі додатково розташовані датчики сили і лінійного переміщення з підсилювачем та резистором зворотного зв'язку. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюSensor of inclination and aligning angles
Автори англійськоюKovshov Hennadii Mykolaiovych, Ryzhkov Ihor Viktorovych, Zhyvtsova Liudmyla Ivanivna
Назва патенту російськоюДатчик зенитного и визирного углов
Автори російськоюКовшов Геннадий Николаевич, Рыжков Игорь Викторович, Живцова Людмила Ивановна
МПК / Мітки
МПК: E21B 47/022
Мітки: візирного, кутів, зенітного, датчик
Код посилання
<a href="https://ua.patents.su/4-78852-datchik-zenitnogo-i-vizirnogo-kutiv.html" target="_blank" rel="follow" title="База патентів України">Датчик зенітного і візирного кутів</a>
Датчик зенітного і візирного кутів
Номер патенту: 68884
Опубліковано: 10.04.2012
Автори: Живцова Людмила Іванівна, Ковшов Геннадій Миколайович, Рижков Ігор Вікторович
МПК: E21B 47/02
Мітки: візирного, кутів, датчик, зенітного
Формула / Реферат:
Датчик зенітного і візирного кутів, що містить циліндричний корпус, усередині якого жорстко закріплені три циліндричні спіральні трубки, заповнені рідинами, що не змішуються, який відрізняється тим, що дві трубки розташовані в площині осі чутливості перпендикулярно одна до одної, а третя - під кутом 90° до осі чутливості, при цьому всі вони мають однаковий розмір, укладені біфілярно в декілька шарів перпендикулярно осі чутливості та з'єднані...
Датчик візирного кута
Номер патенту: 68885
Опубліковано: 10.04.2012
Автори: Рижков Ігор Вікторович, Ковшов Геннадій Миколайович, Живцова Людмила Іванівна
МПК: E21B 47/02
Мітки: візирного, кута, датчик
Формула / Реферат:
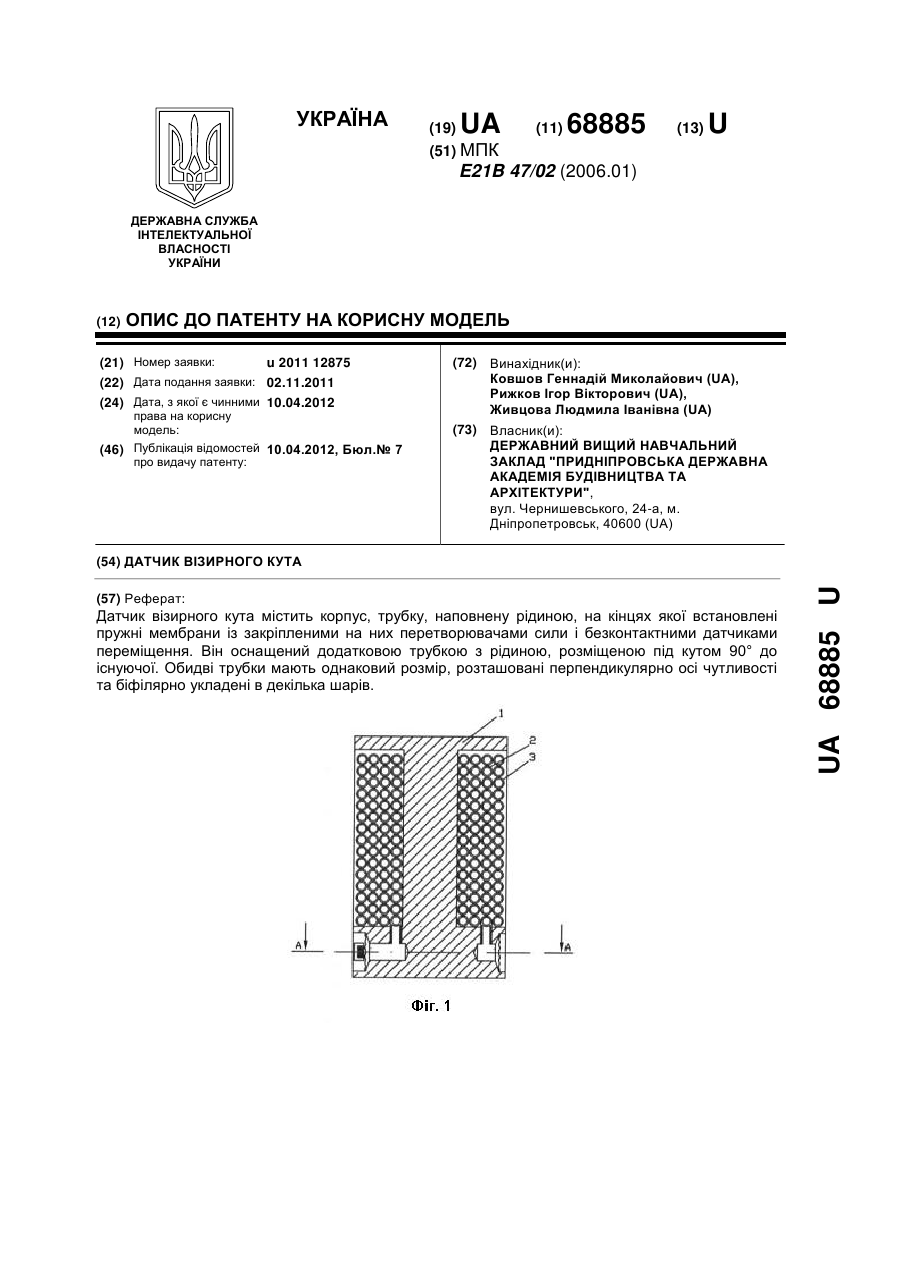
Датчик візирного кута, що містить корпус, трубку, наповнену рідиною, на кінцях якої встановлені пружні мембрани із закріпленими на них перетворювачами сили і безконтактними датчиками переміщення, який відрізняється тим, що він оснащений додатковою трубкою з рідиною, розміщеною під кутом 90° до існуючої, при цьому обидві трубки мають однаковий розмір, розташовані перпендикулярно осі чутливості та біфілярно укладені в декілька шарів.
Датчик зенітного кута для вимірювання скривлення свердловин
Номер патенту: 7780
Опубліковано: 15.07.2005
Автори: Ковшов Генадій Миколайович, Садовникова Олександра Володимирівна
МПК: E21B 47/02
Мітки: скривлення, датчик, зенітного, кута, свердловин, вимірювання
Формула / Реферат:
Датчик зенітного кута для вимірювання скривлення свердловин, що містить корпус, спірально укладену трубку, заповнену рідиною, який відрізняється тим, що виходи трубки розвернуті в протилежні сторони і з'єднані з порожнинами, оснащеними мембранами, на яких закріплені рухомі елементи безконтактних датчиків сили і переміщення.
Компенсаційний датчик зенітного кута

Номер патенту: 26202
Опубліковано: 10.09.2007
Автори: Садовникова Олександра Володимирівна, Пономарьова Олена Анатоліївна, Ковшов Генадій Миколайович
МПК: E21B 47/02
Мітки: датчик, зенітного, компенсаційний, кута
Формула / Реферат:
Компенсаційний датчик зенітного кута, що містить корпус, котушку індуктивності, осердя, яке являє собою чутливий елемент датчика у вигляді тонкої берилієвої струни з пермалоєвим покриттям, закріпленої з одного кінця, який відрізняється тим, що датчик додатково обладнаний ланцюгом зворотного зв'язку з електромагнітом, а на вільному кінці чутливого елемента закріплений постійний магніт.
Двокоординатний датчик кутів нахилу

Номер патенту: 35954
Опубліковано: 16.04.2001
Автори: Худяков Борис Сергійович, Мрачковський Олег Дмитрович
МПК: G01C 9/00
Мітки: нахилу, датчик, кутів, двокоординатний
Формула / Реферат:
1. Двокоординатний датчик кутів нахилу, що містить рухомий електрод, жорстко зв'язаний з контрольованим об'єктом, нерухомий електрод у вигляді грушоподібного маятника і вимірювальну схему, підключену до рухомого електрода, який відрізняється тим, що рухомий електрод виконаний у вигляді порожньої півсфери, в центрі якої підвішено грушоподібний маятник, а сама півсфера поділена на чотири рівних електрично ізольованих один від одного сферичних...
Попередній патент: В’яжуче
Наступний патент: Спосіб визначення типологічних особливостей вищої нервової діяльності свиней різних вікових груп у виробничих умовах
Випадковий патент: Композитний бетон для плит перекриття та фундаменту