Прицільний комплекс для системи керування вогнем танка
Номер патенту: 79542
Опубліковано: 25.06.2007
Автори: Охріменко Анатолій Григорович, Семенов Валєнтин Олександрович, Бурак Анатолій Васильович, Власюк Володимир Васильович, Гордієнко Валентин Іванович
Формула / Реферат
1. Прицільний комплекс, що містить денний приціл (ДП) з незалежною стабілізацією поля зору і датчиком кута вертикального наведення (ДК ВН), нічний приціл (НП) з головним дзеркалом (ГД), кінематично зв'язаним з датчиком положення дзеркала (ДПД) і моментним двигуном (МД), блок керування (БК), балістичний обчислювач (БО), гармату з приводом, кінематично зв'язану з ДК ВН, вихід якого електрично з'єднаний через БО з приводом гармати (ПГ) і першим входом БК, виконаним у вигляді суматора (С), другий вхід якого підключений до виходу ДПД, а вихід суматора підключений до МД, який відрізняється тим, що в нього додатково введені встановлений в башті датчик положення гармати (ДПГ), ротор якого кінематично зв'язаний з гарматою, а електрично з'єднаний з виходом ДПД і третім входом БК датчик зворотного зв'язку за прискоренням (ДЗЗ), підключений до четвертого входу БК і встановлений на осі ГД НП, на протилежній стороні якої встановлені МД, блок живлення (БЖ) в БК для живлення змінною напругою ДПД, комутатор сигналів (КС), датчики ДПГ, ДПД, ДК ВН.
2. Прицільний комплекс за п. 1, який відрізняється тим, що як датчик ДЗЗ використаний двигун, аналогічний моментному двигуну приводу головного дзеркала нічного прицілу.
3. Прицільний комплекс за п. 1, який відрізняється тим, що комутатор сигналів блока керування містить релейний елемент, який за зовнішнім керуючим сигналом підключає синусну обмотку ДПД до входу суматора і вимикає від суматора сигнали датчиків ДПГ і ДК ВН.
4. Прицільний комплекс за п. 1, який відрізняється тим, що БЖ датчика ДПД виконаний з можливістю формування синусоїдної напруги, частота якої складає 800-900 Гц.
Текст
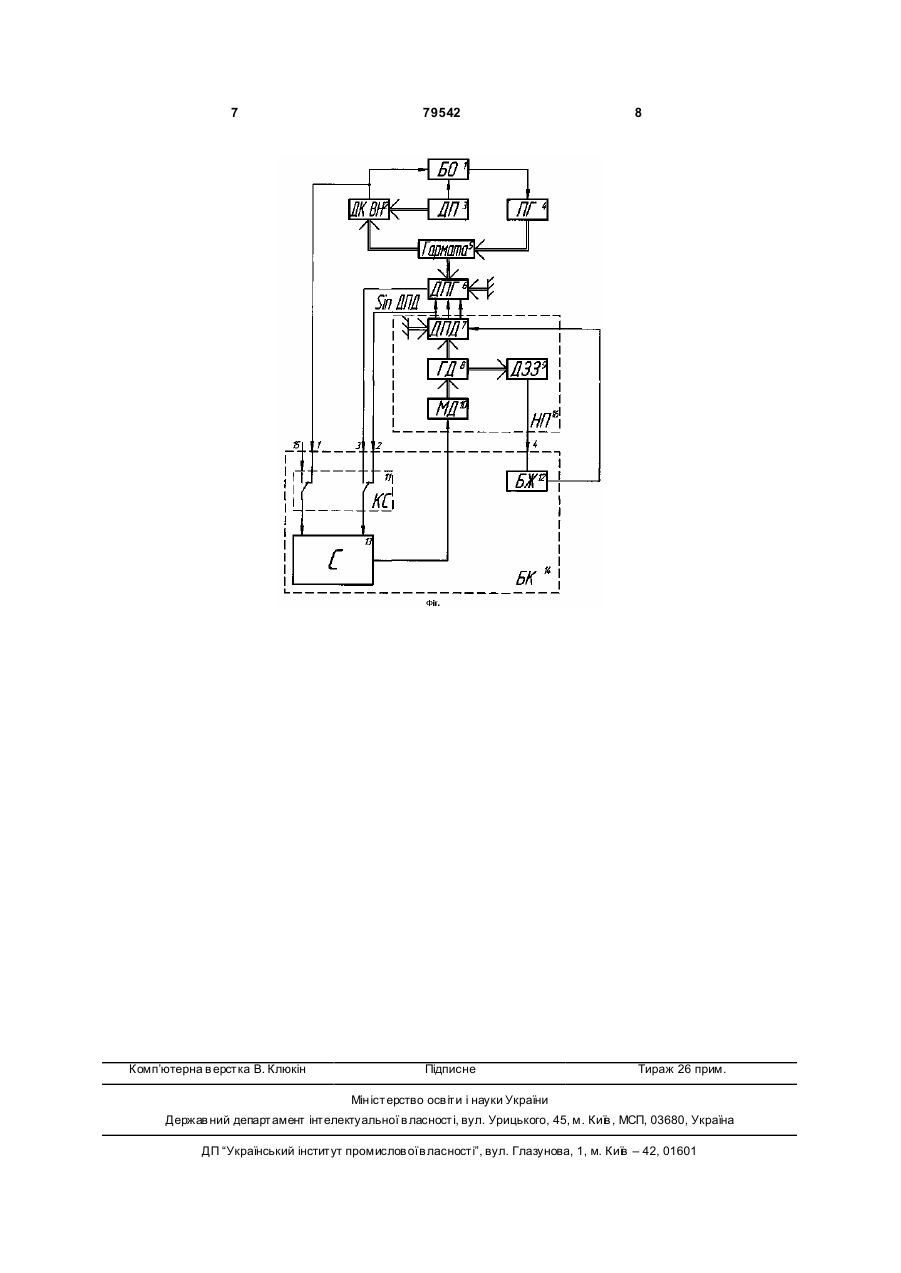
1. Прицільний комплекс, що містить денний приціл (ДП) з незалежною стабілізацією поля зору і датчиком кута вертикального наведення (ДК ВН), нічний приціл (НП) з головним дзеркалом (ГД), кінематично зв'язаним з датчиком положення дзеркала (ДПД) і моментним двигуном (МД), блок керування (БК), балістичний обчислювач (БО), гармату з приводом, кінематично зв'язану з ДК ВН, вихід якого електрично з'єднаний через БО з приводом гармати (ПГ) і першим входом БК, виконаним у вигляді суматора (С), другий вхід якого під C2 2 (19) 1 3 79542 Наявність механічного зв'язку ГД НП з гарматою визначило два суттєви х недоліки. Одним з них є кінематична похибка передачі кута (несинхронність), пов'язана з тим, що тяги і важелі, які з'єднують гармату з ГД НП і ДКР, виготовляються з деякими відхиленнями за довжиною (з допусками) і при розвороті гармати на довільні кути забезпечують розворот ГД НП відносно гармати з помилками, які впливають на точність стрільби. Вже при кутах підйому гармати на 5° несинхронність може досягати 1-1,5мрад. Другим недоліком даної СКВ є температурна нестабільність механічної передачі кута від гармати до ГД НП. У зв'язку з тим, що тяги при зміні температури навколишнього середовища у бойовому відділенні змінюють свої лінійні розміри, ці зміни довжини тяг через систему важелів передаються на дзеркало НП, яке розвертається і зміщує лінію візування НП відносно цілі. За 6-8 годин роботи таке зміщення може досягати 2-3мрад. Це суттєво впливає на ефективність стрільби і потребує виконання частих вивірок, що в бойових умовах не завжди можливо. Для роботи привода ГД НП в прототипі потрібне обов'язкове вмикання всієї СКВ, в тому числі трьохфазного перетворювача 36В 400Гц потужністю 800Вт. Тому тривала автономна робота НП у режимі стеження вночі на акумуляторних батареях неможлива і необхідно запускати двигун танка. Це призводить до надмірного напрацювання приладів СКВ, в тому числі гіроскопів, звукового і теплового демаскування самого танка із-за роботи його двигуна і до невиправданих витрат палива і моторесурсу. В основу винаходу поставлено завдання удосконалення прицільного комплексу, в якому шляхом введення нових вузлів (датчик положення гармати, блок живлення датчика положення дзеркала, комутатор сигналів) і нових зв'язків між новими і відомими блоками забезпечується підвищення точності і ефективності стрільби із танка в нічних умовах, збереження ресурсу суміжних приладів і двигуна танка, а також зменшення витрат палива, спрощення конструкції і підвищення надійності. Поставлене завдання вирішується тим, що у відомий прицільний комплекс, який містить денний приціл (ДП) з незалежною стабілізацією поля зору і датчиком кута вертикального наведення (ДК ВН), нічний приціл (НП) з головним дзеркалом (ГД), кінематичне зв'язаним з датчиком положення дзеркала (ДПД) і моментним двигуном (МД), блок керування (БК), балістичний обчислювач (БО), гармату з приводом, кінематичне зв'язану з ДК ВН, вихід якого електричне з'єднаний через БО з приводом гармати (ПГ) і першим входом БК, виконаним у вигляді суматора (С), другий вхід якого підключений до виходу ДПД, а вихід суматора підключений до МД, в нього додатково введені встановлений в башті датчик положення гармати (ДПГ), ротор якого кінематичне зв'язаний з гарматою, а електричне з'єднаний з виходом ДПД і третім входом БК, датчик зворотнього зв'язку за прискоренням (ДЗЗ), підключений до четвертого входу БК, і встановлений на осі ГД НП, на проти 4 лежній стороні якої встановлений МД, блок живлення (БЖ) в БК для живлення змінною напругою ДПД, комутатор сигналів (КС), датчиків ДПГ, ДПД, ДК ВН. Додатковою відмінністю від прототипу є те, що в якості датчика ДЗЗ використовується двигун, аналогічний моментному двигуну привода ГД НП. Додатковою відмінністю є те, що КС БК містить релейний елемент, який за зовнішнім керувальним сигналом підключає синусну обмотку ДПД до входу С і вимикає від С сигнали ДПГ і ДК ВН. Додатковою відмінністю є те, що БЖ ДПД виробляє синусоїдну напругу, частота якої складає 800...900Гц. Введення нових ознак у взаємозв'язку з відомими ознаками, а також заміна механічного зв'язку гармати з ГД НП на електричний, що складається із контуру: БЖ-ДПД-ДПГ-КС-С-МД-ГД, підвищує точність наведення і утримання прицільної марки НП на цілі, скорочує час на підготовку пострілу і збільшує е фективність стрільби з використанням прицільного комплексу в нічних умовах. Установка виконавчого МД безпосередньо на осі ГД НП підвищує стійкість і точність привода, покращує роздільну здатність приціла і збільшує дальність бачення. Введення ДЗЗ на осі дзеркала також покращує якість привода і збільшує стійкість його роботи, а використання однакових двигунів спрощує конструкцію прицілу. Введення автономного БЖ ДПД в БК дозволяє забезпечити тривалу роботу прицілу в режимі спостереження з мінімальним споживанням електроенергії від штатних акумуляторних батарей танка і застосувати цей приціл в інших об'єктах бронетанкової техніки, де немає змінної напруги. Використання для роботи привода більш високої частоти живлення (замість 400Гц - від 800 до 900Гц) підвищило точність привода стеження і знизило вплив роботи штатних систем танка на роботу привода. Введення КС дозволяє підвищити надійність роботи прицілу при нештатних ситуаціях і при перемиканні ДПГ на роботу в інших режимах. При цьому ГД НП замикається за допомогою привода в режим "місцевої" системи стеження по ланці: БЖДПД-КС-С-МД-ГД і не ударяється об упори голівки прицілу, коли танк рухається. Суть винаходу пояснюється блок-схемою (див. Фіг.), на якій подвійними лініями позначені кінематичні (механічні) зв'язки, а одинарними - електричні зв'язки. Прицільний комплекс містить ДП 3 з незалежною стабілізацією поля зору, ДК ВН 2, підключений до БО 1, 2-й вхід якого з'єднаний з ДП 3, а вихід - з ПГ 4. ПГ 4 кінематичне зв'язаний з гарматою 5, яка через паралелограмні механізми кінематичне зв'язана з ДК ВН 2 і ДПГ 6 . ГД 8 НП кінематичне зв'язане з ротором ДПД 7, статор якого закріплений на корпусі НП 16. На осі ГД 8 встановлені МД 10 і ДЗЗ 9. Входи МД 10 і ДПД 7 з'єднані з 1-м і 2-м виходами БК 14, 1-й, 2-й і 3-й входи якого з'єднані з виходами ДК ВН 2, ДПГ 6 і ДПД 7 відповідно. БК 14 містить БЖ 12, КС 11 і С 13. Вхід КС 11 з'єднаний додатково із зовнішнім керувальним сигналом 15. 5 79542 При вмиканні тільки НП вмикається БК 14 і БЖ 12, що знаходиться в ньому. При цьому забезпечується автономна (без вмикання всієї СКВ) робота привода ГД 8 НП у режимі спостереження. Наводчик має можливість за допомогою ручних приводів переміщувати гармату і зв'язаний з нею ДПГ в пошуках цілі, спостерігаючи в НП, дзеркало якого відстежує за рахунок роботи електропривода положення гармати за контуром: БЖ 12 - ДПД 7 ДПГ 6-КС 11-С 13-МД10,ГД8-ДПД7. Такий режим дозволяє наводчику з мінімальними енерговитратами і без демаскування танка тривалий час працювати з прицілом у сутінках і вночі. Ме ханічний зв'язок гармати з головним дзеркалом НП, на відміну від прототипу, не потрібний. При вмиканні СКВ комплекс працює наступним чином. При виробленні обчислювачем БО 1 нульового сигналу кута прицілювання гармата 5 узгоджена з лінією візування ДП 3. При цьому на виході ДК ВН 2, за сигналом якого керується ПГ 4, напруга дорівнює нулю. Головне дзеркало ГД 8 НП за рахунок наявності системи стеження, що складається із послідовно ввімкнених БЖ 12 - ДПД 7 - ДПГ 6 - КС 11 - С 13 - МД 10 - ГД 8 , також узгоджене з гарматою 5 дзеркалом ДП 3. Неточність узгодження компенсується вивірками, що є в НП, (на фіг. не показані). При керуванні ДП 3 і розвороті його дзеркала гармата 5 переміщується привидом ПГ 4 синхронно з даним дзеркалом за рахунок появи на вході ПГ 4 сигналу розладжування з ДК ВН 2. Відхилення гармати 5 від раніше встановленого положення призводить до розвороту ДПГ 6 на такий же кут, і з його виходу знімається сигнал, пропорційний відхиленню гармати. Цей сигнал подається в БК 14 і через КС 11, С 13 і МД 10 розвертає ГД 8 НП доти, поки ДПД 7 не скомпенсує на С 13 напругу з ДПГ 6 до нуля. Таким чином, розворот гармати 5 і дзеркала ДП 3 на любий кут призводить до аналогічного розвороту ГД 8 НП на той самий кут. Це дозволяє, спостерігаючи ціль в НП через ГД 8, виміряти дальність з допомогою лазерного далекоміра, розташованого в ДП 3. (На фіг. лазерний далекомір не показаний). Обертання ГД 8 від МД 10 передається на ротор ДЗЗ 9, сигнал з якого подається в БК 14, забезпечуючи тривалість роботи електропривода і підвищення його точності. Виміряна далекоміром дальність поступає із ДП 3 в БО 1, який виробляє кут прицілювання і вводить його в ПГ 4. При цьому гармата 5 піднімається на кут прицілювання доти, поки сигнал з ДК ВН 2 не стане рівним виробленому БО 1 куту. При розвороті гармати 5 одночасно розвертається і ротор ДПГ 6. Сигнали з ДК ВН 2 і ДПГ 6 поступають в БК 14 на входи С 13. При рівній крутості цих сигналів і протилежній фазі відбувається 6 їх компенсація і сигнал з виходу С 13 залишається рівним нулю, тобто лінія візування і ГД 8 НП збереже своє узгоджене положення з лінією візування стабілізованого дзеркала ДП 3, дозволяючи здійснити постріл у ціль або повторно виміряти дальність до неї. Аналогічним чином ГД 8 НП зберігає своє положення відносно цілі і при відході гармати 5 на кут зарядження. Під час руху танка по пересіченій місцевості, гармата 5 за рахунок механічних збурень відхиляється від стабілізованого положення, узгодженого з ДП 3, що має незалежну лінію візування. При відхиленні гармати 5 в схему системи стеження НП, що складається з вузлів: БЖ 12 -ДПД 7 - ДПГ 6 - КС 11 - С 13 - МД 10 - ГД 8 вводиться сигнал на С 13 від ДК ВН 2, пропорційний кутовому відхиленню гармати 5, який забезпечує утримування лінії візування НП на цілі. При несанкціонованому вимиканні СКВ апаратурою танка виробляється керувальний сигнал 15, який поступає в КС 11, при цьому відбувається перемикання КС 11, підключення синусної обмотки ДПД 7 до входу С 13 замість вихідного сигналу від ДПГ 6, що привидить ГД 8 у початкове положення у контурі: ГД 8 - ДПД 7 - КС 11 - С 13 - МД 10. Переваги запропонованого винаходу у порівнянні з прототипом полягають в наступному: 1. Відсутність механічного зв'язку ГД НП з гарматою виключає можливість відходу лінії віз ування від цілі, пов'язану зі зміною довжини тяг при перепадах температури в бойовому відділенні танка. 2. Відсутність редуктора для зв'язку МД з ГД НП, установка МД і ДЗЗ на осі ГД НП підвищує параметри точності привода ГД, роздільну здатність поля зору і дальність бачення цілі через НП. 3. Введення привода синхронного стеження ГД, що складається із ДПД і ДПГ, включених в режим трансформаторної передачі кута, виключає можливість помилки кінематичної передачі кута і забезпечує підвищення точності стрільби. 4. Введення автономного БЖ в БК дозволяє забезпечити живлення датчиків ДПД і ДПГ стабільною напругою більшої частоти, що підвищує точність системи стеження і точність наведення прицільної марки НП на ціль, знижує енергоспоживання при роботі НП у режимі спостереження, а також зменшує витрати палива і ресурсу суміжних приладів. 5. Введення КС виключає можливість поломки ГД НП із-за його ударів об упори при позаштатних ситуаціях, що забезпечує утримання ГД в горизонтальному положенні лінії візування НП за сигналом з синусної обмотки датчика ДПД. Згідно з даним винаходом, на НВК"Фотоприлад" виготовлено дослідний зразок прицільного комплексу, іспити якого підтвердили наявність описаного технічного результату. 7 Комп’ютерна в ерстка В. Клюкін 79542 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSight complex for system of tank fire control
Автори англійськоюHordienko Valentyn Ihorovych, Okhrimenko Anatolii Hruyhorovych, Burak Anatolii Vasyliovych
Назва патенту російськоюПрицельный комплекс для системы управления огнем танка
Автори російськоюГордиенко Валентин Игоревич, Охрименко Анатолий Григорьевич, Бурак Анатолий Васильевич
МПК / Мітки
МПК: F41G 5/00
Мітки: вогнем, системі, прицільний, керування, комплекс, танка
Код посилання
<a href="https://ua.patents.su/4-79542-pricilnijj-kompleks-dlya-sistemi-keruvannya-vognem-tanka.html" target="_blank" rel="follow" title="База патентів України">Прицільний комплекс для системи керування вогнем танка</a>
Прицільний комплекс для системи дубльованого керування вогнем танка
Номер патенту: 77433
Опубліковано: 15.12.2006
Автори: Семенов Валентин Олександрович, Бурак Анатолій Васильович, Гордієнко Валентин Іванович, Охріменко Анатолій Григорович, Власюк Володимир Васильович, Фролов Леонід Андрійович, Глущенко Анатолій Романович
Мітки: керування, танка, вогнем, дубльованого, комплекс, прицільний, системі
Формула / Реферат:
1. Прицільний комплекс для системи дубльованого керування вогнем танка, що містить приціл навідника (ПН) з незалежною двохплощинною стабілізацією лінії візування, танковий балістичний обчислювач (ТБО), датчик положення гармати (ДПГ), кінематично зв'язаний з стабілізатором озброєння танка, пульт керування командира (ПКК) і приціл командира з незалежною стабілізацією лінії візування у вертикальній площині, що містить гіростабілізатор (ГС),...
Прицільний комплекс для системи дубльованого керування вогнем танка
Номер патенту: 74226
Опубліковано: 15.11.2005
Автори: Глущенко Анатолій Романович, Бурак Анатолій Васильович, Мазурін Ігор Володимирович, Фролов Леонід Андрійович, Гордієнко Валентин Іванович, Бормотов Василь Петрович, Хомченко Олексій Якович, Охріменко Анатолій Григорович
Мітки: дубльованого, танка, керування, системі, прицільний, вогнем, комплекс
Формула / Реферат:
1. Прицільний комплекс для системи дубльованого керування вогнем танка, що містить приціл наводчика (ПН) з незалежною двоплощинною стабілізацією лінії візування, танковий балістичний обчислювач (ТБО), датчик положення гармати (ДПГ), кінематично зв'язаний з гарматою стабілізатора озброєння танка, пульт керування командира (ПКК) і приціл командира з незалежною стабілізацією лінії візування у вертикальній площині, що включає гіростабілізатор...
Система керування вогнем танка
Номер патенту: 51805
Опубліковано: 16.12.2002
Автори: Бондаренко Олександр Григорович, Фролов Леонід Андрійович
МПК: F41G 5/00
Мітки: керування, система, вогнем, танка
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, датчик кутового положення гармати, жорстко установлений на башті і кінематично зв'язаний з гарматою, приціл, датчик кута вертикального наведення і датчик кута горизонтального наведення, які кінематично зв'язані з прицілом і відповідно з гарматою і баштою, а датчик кута вертикального наведення електрично зв'язаний з приводом гармати, яка відрізняється тим, що в систему...
Пристрій указання цілі для системи керування вогнем танка
Номер патенту: 49990
Опубліковано: 15.10.2002
Автори: Походняков Валерій Георгійович, Фролов Леонід Андрійович, Бондаренко Олександр Григорович
Мітки: системі, вогнем, пристрій, указання, танка, цілі, керування
Формула / Реферат:
1. Пристрій указання цілі для системи керування вогнем танка, що містить привід башти, блок керування приводом, прилад цілеуказання, пульт наведення, підсилювач наведення, гіростабілізатор, моментний двигун горизонтального наведення, датчик кута горизонтального наведення, схему горизонтального розвантаження, що включає підсилювач горизонтального розвантаження, датчик кута горизонтального розвантаження і моментний двигун горизонтального...
Система керування вогнем танка
Номер патенту: 49989
Опубліковано: 15.10.2002
Автори: Походняков Валерій Георгійович, Бусяк Юрій Митрофанович, Бондаренко Олександр Григорович, Фролов Леонід Андрійович, Руденко Микола Прохорович
МПК: F41G 5/00
Мітки: танка, керування, вогнем, система
Формула / Реферат:
1. Система керування вогнем танка, що містить денний приціл, який складається з гіростабілізатора і кінематично зв'язаних з ним головного дзеркала прицілу і датчика кута вертикального наведення, балістичний обчислювач, вхід якого з'єднаний з датчиком кута вертикального наведення, а вихід якого з'єднаний з приводом гармати, яка кінематично зв'язана з датчиком кута вертикального наведення і датчиком положення гармати, нічний приціл, що...
Попередній патент: Установка для вдавлювання шпунта, паль або інших подібних будівельних конструкцій
Наступний патент: Спосіб шліфування плоских поверхонь і пристрій для його здійснення
Випадковий патент: Пристрій для початкового та повторних запалювань зварювальної дуги змінного струму