Свердловинний пристрій для селективного гамма-гамма- каротажу
Номер патенту: 80035
Опубліковано: 10.08.2007
Автори: Азарян Альберт Арамаісович, Василенко Вячеслав Євгенійович, Головко Олександр Вікторович
Формула / Реферат
Свердловинний пристрій для селективного гамма-гамма-каротажу, що містить пульт керування з джерелом живлення, мікропроцесором та програмувальним і оперативним запам'ятовуючими пристроями, з'єднаними з відповідними входами мікропроцесора, дисплеєм, контролер якого з’єднаний з виходом мікропроцесора, зонд, який складається з циліндричного корпусу з розміщеними у ньому двома джерелами гамма-випромінювання, розміщеними в контейнері, встановленому з можливістю обертання під дією власної ваги відносно поздовжньої осі зонда, детектором гамма-квантів, підсилювачем сигналів детектора, вихід якого з’єднаний з лічильним входом мікропроцесора, та центратором, з'єднаним з корпусом зонда, який відрізняється тим, що в зонді, співвісно з його поздовжньою віссю, встановлений реохорд циліндричної форми, нерухома частина якого механічно з’єднана з корпусом зонда, а повзунок реохорда встановлений з можливістю обертання відносно поздовжньої осі зонда під дією власної ваги, причому кінці реохорда підключені до полюсів джерела живлення, а повзунок підключений до аналогового входу мікропроцесора.
Текст
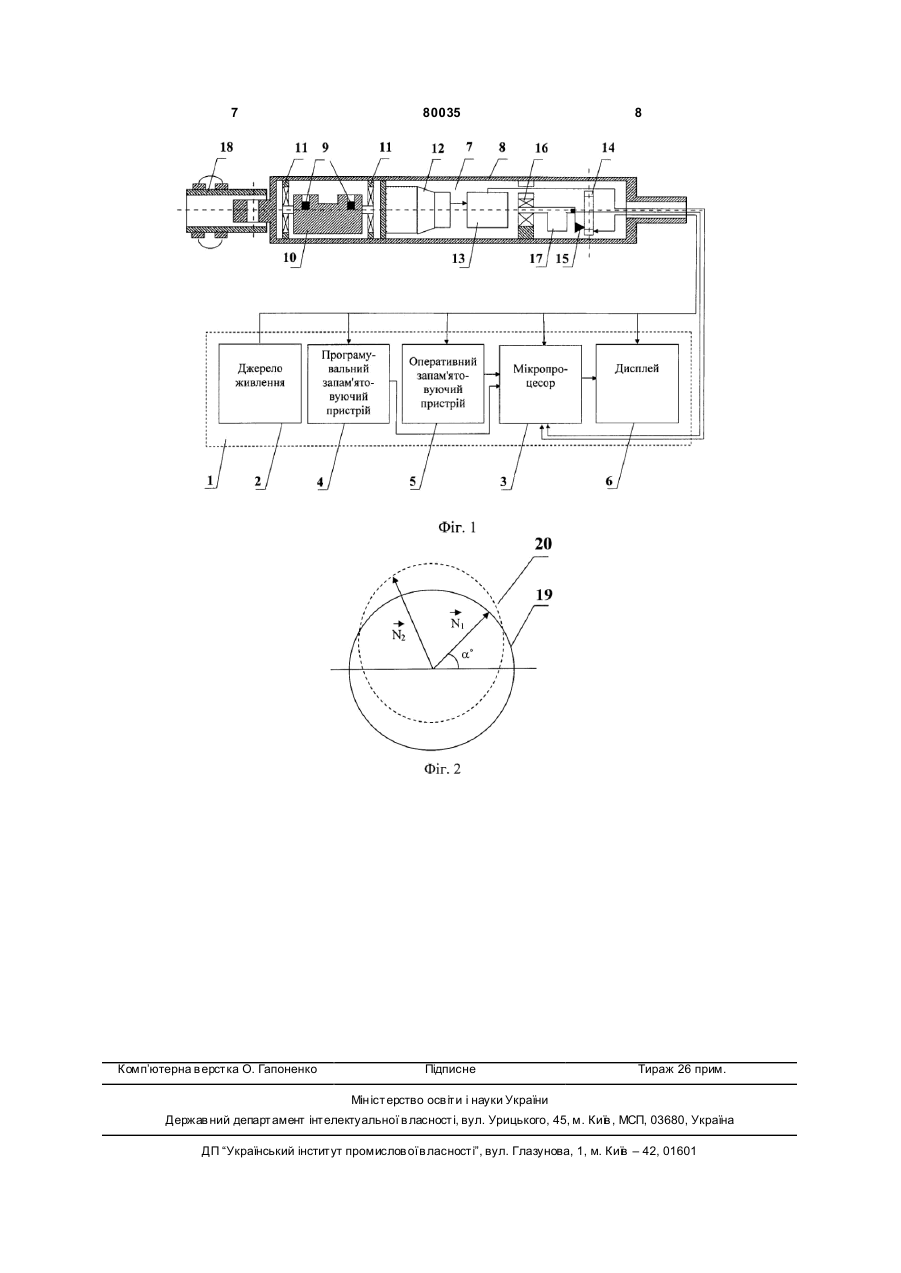
Свердловинний пристрій для селективного гамма-гамма-каротажу, що містить пульт керування з джерелом живлення, мікропроцесором та програмувальним і оперативним запам'ятовуючими C2 1 3 80035 кості лічення імпульсів з детектора, що збільшує точність виміру вмісту корисного компоненту, та ефективність використання пристрою взагалі. Але завдяки особливості конструкції датчика (він призначений для визначення вмісту корисного компонента в пробах подрібнених руд) даний пристрій не може бути використаний для цілей каротажу. Найближчим за технічним рішенням є відомий свердловинний пристрій для селективного гамагама каротажу, що містить пульт керування з джерелом живлення, мікропроцесором, програмуючим та оперативним запам'ятовуючим пристроями, поєднаними з відповідними входами мікропроцесора, дисплеєм, контролер якого поєднано з виходом мікропроцесора, зонд, який складається з циліндричного корпусу з розміщеними у ньому двома джерелами гама-випромінювання в контейнері, встановленому з можливістю обертання під дією власної ваги відносно поздовжньої вісі зонда, детектором гама-квантів, підсилювачем сигналів детектору, поєднаним виходом з лічильним входом мікропроцесора, та центратором, з'єднаним з корпусом зонду [Патент на винахід №34882 А Бюл. №2, 2001, Україна]. Однак, як показав досвід експлуатації цього свердловинного пристрою, він дуже складний в настройці та не завжди вдається добитися того, щоб при обертанні зонда в свердловині зі стабільним вмістом корисного компоненту величина інтенсивності розсіяного стінками свердловини випромінювання та випромінювання, що реєструється детектором (критерій вмісту корисного компоненту) залишалася сталою, тобто є присутньою радіальна неоднорідність в інтенсивності випромінювання, що реєструється детектором зонда. Причинами чого можуть служити різниці в товщині стінок корпуса зонда (навіть в долях міліметра), ексцентричні положення вісі контейнера з джерелами, кристала и фотопомножувача детектора відносно вісі зонда. Ці причини вкупі можуть привести до відмінностей в інтенсивності випромінювання, що реєструється детектором при обертанні зонда до 7...10%. Звести дані відмінності до допустимого рівня (0.2...0.3%), навіть при тривалій і ретельній настройці зонда не завжди вдається. Це обмежує точність та достовірність результатів каротажу. Завданням винаходу є вдосконалення свердловинного пристрою для селективного гама-гама каротажу за рахунок виключення впливу радіальної неоднорідності в інтенсивності гамавипромінювання, що реєструється детектором зонда, на результати вимірювання вмісту корисного компоненту, що дозволяє підвищити точність каротажу. Поставлене завдання вирішується тим, що в свердловинному пристрої для селективного гамагама каротажу, що містить пульт керування з джерелом живлення, мікропроцесором, програмуючим та оперативним запам'ятовуючим пристроями, поєднаними з відповідними входами мікропроцесора, дисплеєм, контролер якого поєднано з виходом мікропроцесора, зонд, який складається з циліндричного корпусу з розміщеними у ньому двома джерелами гама-випромінювання в контейнері, 4 встановленому з можливістю обертання під дією власної ваги відносно поздовжньої вісі зонда, детектором гама-квантів, підсилювачем сигналів детектору, поєднаним виходом з лічильним входом мікропроцесора, та центратором, з'єднаним з корпусом зонду. Згідно з винаходом в зонді співвісно з його поздовжньою віссю встановлено реохорд циліндричної форми, нерухома частина якого поєднана механічно з корпусом зонда, а повзунок реохорда встановлено з можливістю обертатися відносно поздовжньої осі зонду під дією власної ваги, причому кінці реохорда підключено до полюсів джерела живлення, а повзунок - до аналогового входу мікропроцесора. Установка в зонді реохорда з вказаними механічними и електричними прив'язками його частин по суті виконує функцію датчика положення зонда в свердловині відносно його положення, прийнятого при градуюванні за "0". В залежності від кута повороту зонда в свердловині, на аналоговий вхід мікропроцесора буде поступати напруга, що характеризує величину цього кута. По величині цієї напруги можна судити про положення зонда в свердловині і, при необхідності, згідно з заздалегідь введеною в ПЗП програмою, корегувати коефіцієнт перерахунку інтенсивності гамавипромінювання, що реєстр ується, в данні про вміст корисного компоненту і, таким чином, виключити вплив радіальної неоднорідності інтенсивності розсіяного випромінювання на результати каротажу, чім досягається підвищення достовірності результатів каротажу, знижуються витати часу на юстировку зонда при його настройці. Заявлений винахід ілюструється схемами, де на Фіг.1 приведена схема свердловинного пристрою, на Фіг.2 - векторна діаграма розподілу інтенсивності розсіяного випромінювання. Прилад містить пульт керування 1 з джерелом живлення 2, мікропроцесором 3, програмувальним 4 та оперативним 5 запам'ятовуючими приладами поєднаними з відповідними входами мікропроцесора 3, дисплеєм 6, вхід якого поєднано з виходом мікропроцесора 3, зонд 7, який складається з циліндричного корпусу 8, з розміщеними у ньому двома джерелами гама-випромінювання 9 в контейнері 10, встановленому на підшипниках 11 з можливістю обертання під дією власної ваги відносно поздовжньої вісі зонда, детектором гамаквантів 12, підсилювачем 13 сигналів детектору 12, поєднаним виходом з лічильним входом мікропроцесора 3, реохордом 14, нерухома частина якого поєднана механічно з корпусом 8 зонда, а виводи підключено до полюсів джерела живлення 2, повзунок 15 реохорда, вісь якого закріплена в підшипник 16 з можливістю обертатися відносно поздовжньої осі зонду під дією ваги потяжувача 17, а електрично повзунок 15 підключено до аналогового входу мікропроцесора 3, центратор 18, з'єднаний механічно з корпусом 8 зонда 7. Перед проведенням каротажних робіт пристрій налаштовують. Для цього зонд 7 встановлюють у контрольно-калібрувальний пристрій [ККП] (модель свердловини) і його обертанням у ККП відносно поздовжньої осі зонда домагаються щоб на аналоговому вході мікропроцесора напруга змен 5 80035 шилася до 0. На корпусі 8 зонда 7 роблять відмітку і це його положення приймають за нульове, від якого ведуть відлік кута повороту зонда в ККП. У цьому положенні зонда вимірюють і реєструють швидкість лічення імпульсів Ν, що надходять на лічильний вхід мікропроцесора з детектора, що характеризує величину інтенсивності розсіяного випромінювання від ККП в даному положенні зонда. Потім зонд провертають на заздалегідь заданий кут (10, 15°), убік збільшення напруги на аналоговому вході мікропроцесора, і реєструють швидкість лічення імпульсів, що надходять на лічильний вхід мікропроцесора з детектора й величину напруги и, на аналоговому вході в цьому положенні зонда. Провертають зонд із заданим кроком кута на 360° і реєструють після кожного провертання значення кута a, величину напруги на аналоговому вході мікропроцесора, швидкість лічення імпульсів Ni на лічильному вході. За парним значенням кутів повороту й швидкості лічення імпульсів на лічильному вході мікропроцесора будують, у полярних координатах, залежність N=f(a) (1) де N - швидкість лічення імпульсів на лічильному вході мікропроцесора, a - кут повороту зонда. При якісно виготовленому й настроєному зонді ця залежність має вигляд окружності с радіусом N1, зображеної суцільною лінією 19 на Фіг.2. Однак, дуже часто, залежність має вигляд, близький до фігури зображеній пунктиром 20 (вектор швидкості лічення N2), тобто має місце радіальна неоднорідність у розподілі розсіяного випромінювання (що і є причиною погрішностей при каротажі). Потім обчислюють середнє, по всіх вимірах, значення швидкості лічення Ncp. Для кожного зі значень кута повороту зонда a обчислюють величину коефіцієнта поправки за формулою: Кi=Ni/ Ncp (2) де - Кi - величина коефіцієнта для заданого ітого значення кута a і повороту зонда, Nі - величина швидкості лічення при заданому куті a і. За значеннями величини напруги ui, що поступає на аналоговий вхід мікропроцесора для кутів a і і розрахованим значенням коефіцієнтів Кi визначають аналітичний вид залежності Кi=f(ui). Потім складають програму автоматичного визначення значення коефіцієнта Кi за величиною значення напруги ui, програму корекції швидкості лічення імпульсів за величиною отриманих значень Кi, які вводять у ПЗП 4 пристрою. Пристрій працює наступним чином. При переміщенні зонда 6 у свердловині центратор 17 забезпечує його розташування по центру свердло 6 вини. Гама-випромінювання джерел 8, розміщених у контейнері 9 опромінює поверхню верхньої утворюючої свердловини, оскільки контейнер 9 виконаний зі зміщеним центром ваги і встановлений у підшипниках 10 і тому колімаційні отвори джерел 8 напрямлені убік верхньої утворюючої свердловини. Розсіяне стінками свердловини випромінювання попадає на детектор 11 де перетворюється в послідовність електричних імпульсів, частота яких пропорційна величині інтенсивності розсіяного випромінювання. З детектора 11 імпульси через підсилювач 12 надходять на лічильний вхід мікропроцесора 3. Одночасно на аналоговий вхід мікропроцесора надходить сигнал з повзунка 14 реохорда 13. Величина цього сигналу залежить від того, якою частиною своєї поверхні (периметра) корпус 7 зонда 6 звернений до верхньої утворюючої свердловини або, іншими словами від того, на який кут провернувся корпус зонда щодо умовного значення прийнятого за "0" при настройці зонда. Це забезпечується тим, що реохорд 13 підключений паралельно до джерела живлення 2, а величина напруги на повзунку 14 залежить від того, з якою частиною периметра реохорда в цей момент він контактує. Оскільки вісь повзунка 14 закріплена в підшипнику 15, то під дією потяжувача 16 повзунок 14 завжди буде перебувати в нижнім положенні щодо осі зонда, а основа реохорду 13 обертатися разом з корпусом зонда. Тобто, при повороті зонда 6 щодо поздовжньої осі повзунок 14 буде контактувати з різними ділянками реохорда 13 і від величини кута повороту залежить величина напруги на повзунку 14. Таким чином, на вхід мікропроцесора 3 пульта керування 1 надходить одночасно 2 сигнали - частота імпульсів, що характеризує інтенсивність випромінювання, що реєструє де тектор 11 і напруга, величина якої характеризує радіальне положення зонда (кут повороту зонда щодо умовного, прийнятого при настройці за "0"). Мікропроцесор за програмою, що введена заздалегідь у ПЗП, за величиною напруги, що надходить на аналоговий вхід, коректує значення величини частоти імпульсів, що надходять на лічильний вхід (ділить миттєве значення частоти імпульсів Ni на миттєве значення Кi) і за скоректованим значенням швидкості лічення визначає вміст корисного компонента в даному вимірі та видає результат про вміст на дисплей 6. Свердловинний пристрій може бути реалізовано на базі каротажного зонда рудничного радіометра типу РСР із введенням у нього реохорда. Як пульт може бути використаний пульт управління радіометра ПАКС-4 із відповідно переробленою програмою обробки результатів вимірів. Використання запропонованого пристрою для селективного гама-гама каротажу забезпечує, у порівнянні з існуючими, підвищення достовірності результатів каротажу горизонтальних і похилих свердловин. 7 Комп’ютерна в ерстка О. Гапоненко 80035 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for selective well gamma-gamma logging
Автори англійськоюAzarian Albert Aramaisovych, Vasylenko Viacheslav Yevheniyovych
Назва патенту російськоюУстройство для избирательного скважинного гамма-гамма-каротажа
Автори російськоюАзарян Альберт Арамаисович, Василенко Вячеслав Евгеньевич
МПК / Мітки
МПК: G01V 5/00
Мітки: гамма-гамма, селективного, свердловинний, каротажу, пристрій
Код посилання
<a href="https://ua.patents.su/4-80035-sverdlovinnijj-pristrijj-dlya-selektivnogo-gamma-gamma-karotazhu.html" target="_blank" rel="follow" title="База патентів України">Свердловинний пристрій для селективного гамма-гамма- каротажу</a>
Свердловинний прилад для селективного гамма-гамма каротажу
Номер патенту: 34882
Опубліковано: 15.03.2001
Автори: Бородавкін Валентин Михайлович, Лісовий Георгій Миколайович, Василенко В'ячеслав Євгенович, Азарян Альберт Арамаісович, Шпилька Андрій Михайлович
МПК: E21B 49/00, G01V 5/00
Мітки: гамма-гамма, свердловинний, прилад, каротажу, селективного
Формула / Реферат:
Свердловинний прилад для селективного гамма-гамма каротажу, що містить зонд. який складається з циліндричного корпусу з розміщеними в ньому джерелами гамма-випромінювання в контейнерах з колімаційними каналами, детектором гамма квантів, електронною схемою перетворення сигналів детектора, і з'єднаний зондом центратор, який відрізняється тим. що контейнери об'єднані в монолітний блок, який встановлений з можливістю обертання відносно...
Пристрій для магнітного каротажу геофізичних свердловин
Номер патенту: 24599
Опубліковано: 10.07.2007
Автори: Шаров Віктор Володимирович, Цибулевський Юрій Євгенович, Юрко Олександр Володимирович, Азарян Альберт Арамаісович, Лісовий Георгій Миколайович
МПК: G01N 27/72
Мітки: магнітного, пристрій, геофізичних, каротажу, свердловин
Формула / Реферат:
1. Пристрій для магнітного каротажу геофізичних свердловин, що містить блок живлення, перетворювач напруги, послідовно з'єднані блок керування генератором, підсилювач потужності, генератор і генераторну котушку, вимірювальний прилад, а також послідовно з'єднані приймальну котушку, вимірювальний підсилювач і амплітудний детектор, який відрізняється тим, що вихід амплітудного детектора через аналого-цифровий перетворювач та інтерфейс підключено...
Пристрій для вимірювання потоку гамма-випромінювання
Номер патенту: 70034
Опубліковано: 10.08.2007
Автори: Рибка Олександр Вікторович, Кутній Володимир Євдокимович, Шляхов Ілля Миколайович, Кутній Дмитро Володимирович
МПК: H01L 31/115, G01T 1/24
Мітки: пристрій, потоку, вимірювання, гамма-випромінювання
Формула / Реферат:
Пристрій для вимірювання потоку гамма-випромінювання, який містить блок детектування з детекторами з напівпровідникового напівізолюючого матеріалу, вихід блока детектування з'єднаний із входом підсилювача з малим шумом, вихід якого з'єднаний із входом формувача імпульсів, вхід блока детектування з'єднаний із схемою вимірювання потужності дози, яка містить регулятори напруги та обчислювальний пристрій, вхід якого з'єднаний із входом формувача...
Пристрій для імпульсного нейтронного каротажу

Номер патенту: 29818
Опубліковано: 15.11.2000
Автори: Бухало Олег Петрович, Драбич Петро Петрович, Ткаченко Наум Давидович, Михайленко Борис Володимирович
МПК: G01V 5/00
Мітки: каротажу, пристрій, нейтронного, імпульсного
Текст:
...умовно показана на діаграмі 33 позитивним імпульсом) з'являється імпульс запуску блока реєстрації і перетворення 3 і блока перетворення моніторного каналу 5 (діаграма 34, фіг. 2). 4 29818 Крім того, після спрацювання блок запуску 6 блокується по своєму другому входу на інтервал часу, де що менший періоду слідування запускаючих імпульсів, з метою виключення його помилкових запусків в інтервалі між імпульсами запуску (зокрема, а...
Пристрій для імпедансного акустичного каротажу
Номер патенту: 71678
Опубліковано: 15.12.2004
Автори: Кармазенко Володимир В'ячеславович, Новік Микола Андрійович, Гуцалюк Володимир Михайлович, Орнатський Дмитро Петрович
Мітки: каротажу, акустичного, пристрій, імпедансного
Формула / Реферат:
1. Пристрій для імпедансного акустичного каротажу, що містить наземну контрольно-реєструючу панель із блоками виміру і реєстрації, каротажний кабель і свердловинний зонд, який містить захисну циліндричну оболонку, високодобротний вібратор поздовжніх коливань, коаксіально розміщений всередині захисної циліндричної оболонки і з'єднаний з останньою за допомогою дискового акустичного трансформатора, внутрішній отвір якого охоплює середину...
Попередній патент: Обчислювач витрати
Наступний патент: Застосування тетра-m-гідрофосфатів диренію (ііі) як речовин з антипроліферативною активністю відносно клітин коренів кукурудзи
Випадковий патент: Пристрій стрічкообв'язувальний