Спосіб керування приводом скребкового конвеєра з планетарним редуктором та привід скребкового конвеєра з планетарним редуктором
Номер патенту: 81015
Опубліковано: 26.11.2007
Автори: Потапов Ігор Григорович, Висоцький Геннадій Васильович, Леусенко Анатолій Васильович, Літвак Грігорій Алєксандров, Ковальчук Олександр Миколайович, Рікман Ігорь Владіміровіч
Формула / Реферат
1. Спосіб керування приводом скребкового конвеєра з планетарним редуктором, який полягає у тому, що електричний двигун приводу скребкового конвеєра розганяють до номінального значення робочої характеристики за відсутності гальмівного моменту на зовнішньому центральному колесі диференціального механізму з наступним підключенням кінематичного ланцюга приводу конвеєра до вихідного вала двигуна шляхом створення гальмівного моменту на зовнішньому центральному колесі диференціального механізму і виключають згаданий гальмівний момент при виключенні конвеєра, який відрізняється тим, що на вихідному валу диференціального механізму створюють гальмівний момент при розгоні електричного двигуна приводу скребкового конвеєра до номінального значення робочої характеристики, а також при виключенні конвеєра, і виключають цей гальмівний момент при підключенні кінематичного ланцюга приводу конвеєра.
2. Спосіб за п. 1, який відрізняється тим, що одночасно створюють гальмівний момент на зовнішньому центральному колесі диференціального механізму і виключають гальмівний момент на вихідному валу диференціального механізму при підключенні кінематичного ланцюга приводу конвеєра до вихідного вала двигуна і одночасно виключають гальмівний момент на зовнішньому центральному колесі диференціального механізму і створюють гальмівний момент на вихідному валу диференціального механізму при відключенні кінематичного ланцюга приводу конвеєра від вихідного вала двигуна при виключенні конвеєра.
3. Спосіб за п. 1, який відрізняється тим, що попереднє натягування скребкового ланцюга конвеєра здійснюють шляхом підключення кінематичного ланцюга приводу конвеєра при створенні обмеженого гальмівного моменту на зовнішньому центральному колесі диференціального механізму з наступним створенням гальмівного моменту на вихідному валу диференціального механізму при виключенні двигуна.
4. Привід скребкового конвеєра з планетарним редуктором, який має електродвигун, планетарний редуктор з диференціальним і планетарним механізмами, вихідний вал якого зв'язаний з привідною зірочкою конвеєра, диференціальний механізм виконаний у вигляді центрального колеса з внутрішнім зачепленням, зв'язаним через першу керовану муфту з корпусом редуктора, і сателітів, установлених на водилі, вал якого зв'язаний із вхідним валом планетарного механізму і через другу керовану муфту зв'язаний з корпусом редуктора, при цьому привід має синхронізатор включення і виключення першої і другої керованих муфт.
5. Привід за п. 4, який відрізняється тим, що перша і друга керовані муфти виконані у вигляді дискових фрикційних муфт, при цьому перша керована муфта нормально розімкнута, а друга керована муфта нормально замкнута.
6. Привід за п. 4, який відрізняється тим, що синхронізатор включення і виключення першої і другої керованих муфт виконаний у вигляді двох протилежно розміщених одноплунжерних гідравлічних циліндрів, робочі камери яких гідравлічно зв'язані між собою, а плунжери гідравлічних циліндрів кінематично зв'язані відповідно із півмуфтами першої і другої керованих муфт.
Текст
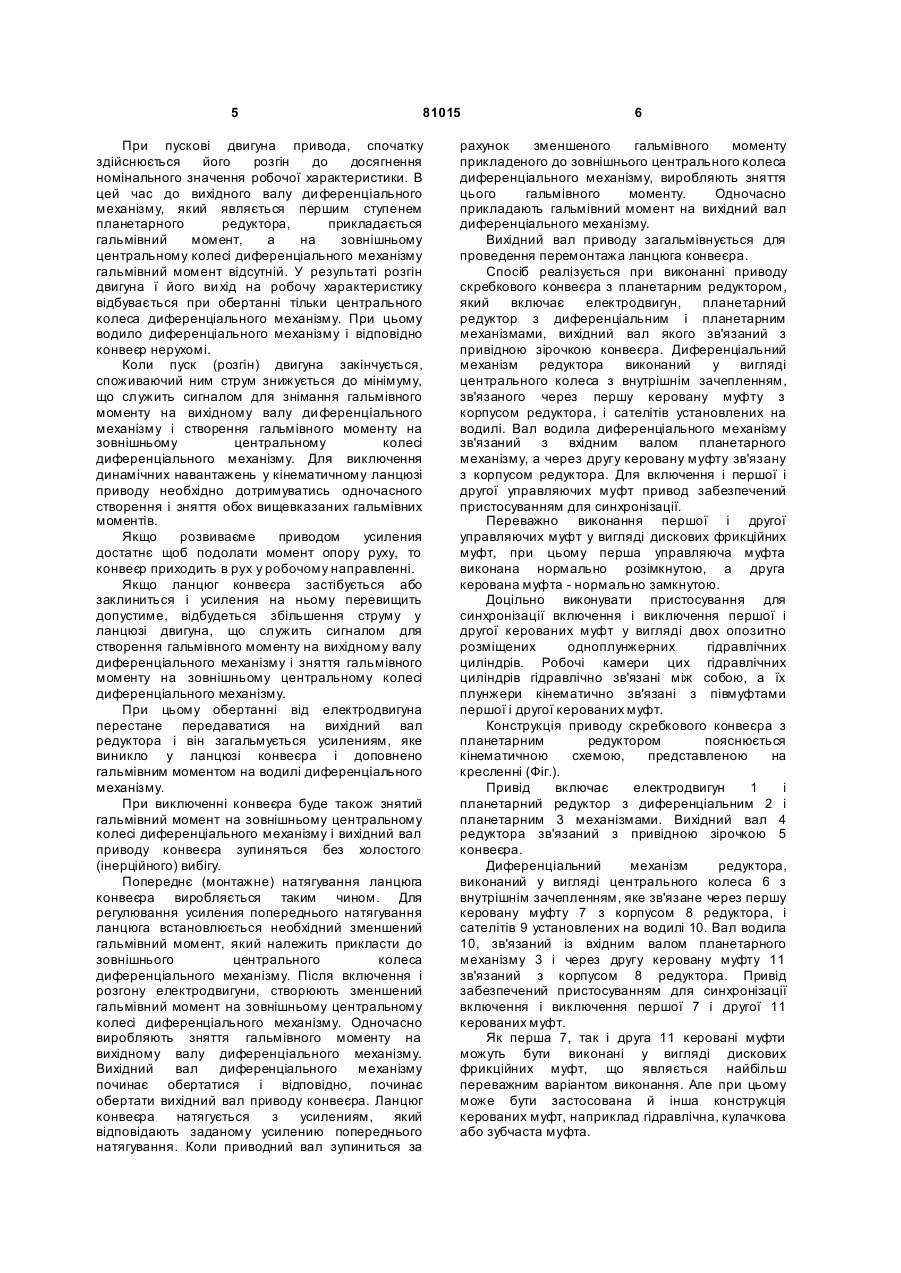
1. Спосіб керування приводом скребкового конвеєра з планетарним редуктором, який полягає у тому, що електричний двигун приводу скребкового конвеєра розганяють до номінального значення робочої характеристики за відсутності гальмівного моменту на зовнішньому центральному колесі диференціального механізму з наступним підключенням кінематичного ланцюга приводу конвеєра до вихідного вала двигуна шляхом створення гальмівного моменту на зовнішньому центральному колесі диференціального механізму і виключають згаданий гальмівний момент при виключенні конвеєра, який відрізняється тим, що на вихідному валу диференціального механізму створюють гальмівний момент при розгоні електричного двигуна приводу скребкового конвеєра до номінального значення робочої характеристики, а також при виключенні конвеєра, і виключають цей гальмівний момент при підключенні кінематичного ланцюга приводу конвеєра. 2. Спосіб за п. 1, який відрізняється тим, що одночасно створюють гальмівний момент на зовнішньому центральному колесі диференціального механізму і виключають гальмівний момент на вихідному валу 2 (19) 1 3 відповідно із півмуфтами 81015 першої і другої Винахід відноситься до транспортного устаткування для гірничої промисловості і може бути використаний у приводах забійних конвеєрів при підземному розробленні корисних копалин. Відомий спосіб керування приводом конвеєра за допомогою автоматичної системи, яка вміщує гідравлічну муфту змінюваного об'єму. Вхід муфти з'єднаний з першим двигуном, а вихід - із гальмом і вантажем. Муфта вмішує пристосування, яке регулює об'єм чи наповнення і яке реагує на зовнішні управляючі сигнали для пуску і зупинки вантажу. Регулююче пристосування реагує на датчик реакції гальма і швидкість вантажу так, що при надходженні пускового сигналу гальма звільняються для підтримання необхідної величини прискорення [Див. заявку ЕР №0166511, МПК В65G23/26 опубл. 01.02.86] [1]. Недоліками такого способу керування конвеєром слідує віднести високу вартість системи автоматичного регулювання, а також, те, що при використанні способа відсутнє гальмо приводного вала конвеєра, що приводить до значного холостого вибігу ланцюга конвеєра під час його зупинки. Це може привести до небажаних наслідків, особливо при роботі конвеєра на похилих пластах. Для попереднього натягування ланцюга конвеєра, що необхідно для стійкої його роботи, у таких приводах застосовують спеціальні механічні і гідромеханічні пристрої наприклад, гідродвигуни з механічною передачею на редуктор приводу конвеєра. Використовуються храпові пристрої або диск, установлений на первинному валу редуктора з фрикційними колодками, які стопорять первинний вал редуктора. Такі пристрої значно ускладнюють конструкцію приводів конвеєра і головне не забезпечують визначену величину попереднього натягування ланцюга конвеєра. Найбільш близьким до нинішнього винаходу за технічною сутністю і досягнутому технічному результаті являється спосіб керування приводом скребкового конвеєра з планетарним редуктором, що містить ступінь з диференціальним механізмом. Так як відомо, прості планетарні механізми можуть бути створені сполученням циліндричних зубчатих коліс з внутрішнім і зовнішнім зачепленням [С.М.Кожевніков і др. "Ме ханізми" Довід пос. М, "Машинобудування, 1976 с.188, 189] [2]. Спосіб полягає в розгоні електричного двигуна привода скребкового конвеєра до номінального значення робочої характеристики за відсутності гальмівного моменту на зовнішнім центральнім колесі диференціального механізму із наступним підключенням кінематичного ланцюга приводу конвеєра до вихідного вала двигуна шляхом створення гальмівного моменту на зовнішньому центральному колесі диференціального механізму і зняття згаданого гальмівного моменту при керованих 4 муфт. виключенні конвеєра [див. опис до авторського свідоцтва СРСР №572022, МПК В65G23/26, опубл. 25.05.78]. Відомий спосіб дозволяє здійснювати запуск електродвигуна конвеєра в холосту, але не забезпечує зменшення холостого вибігу ланцюга конвеєра і вимагає спеціального гальмівного пристрою для проведення попереднього натягування ланцюга конвеєра. Технічне завдання, яке вирішується винаходом, полягає в підвищенні пускових характеристик приводу і ліквідації холостого вибігу скребкового ланцюга, а також здійснення її необхідної рахункової попередньої натяжки. Поставлене завдання рішається завдяки того, що у способі керування приводом скребкового конвеєра з планетарним редуктором, щомістить ступінь з диференціальним механізмом і полягає в розгоні електричного двигуна приводу скребкового конвеєра до номінального значення робочої характеристики при відсутності гальмівного моменту на зовнішньому центральному колесі диференціального механізму з наступним підключенням кінематичного ланцюга приводу конвеєра до вихідного валу двигуна шляхом створення гальмівного моменту на зовнішньому центральному колесі диференціального механізму і зняття згаданого гальмівного моменту при виключенні конвеєра, на вихідному валу диференціального механізму додатково створюють гальмівний момент при розгоні електричного двигуна приводу скребкового конвеєра до номінального значення робочої характеристики, а також при виключенні конвеєра, і знімають цей гальмівний момент при підключенні кінематичного ланцюга приводу конвеєра. А також за рахунок того, що створення гальмівного моменту на зовнішньому колесі диференціального механізму і зняття гальмівного моменту на вихідному валу ди ференціального механізму при підключенні кінематичного ланцюга приводу конвеєра до вихідного вала двигуна, а також зняття гальмівного моменту на зовнішньому центральному колесі диференціального механізму і створення гальмівного моменту ш. ви хідному валу диференціального механізму при відключенні конвеєра, здійснюють одночасно. Також за рахунок того, що попереднє натягування скребкового ланцюга конвеєра, виробляють шляхом підключення кінематичного ланцюга приводу конвеєра при створенні обмеженого гальмівного моменту на зовнішньому центральному колесі диференціального механізму з наступним створенням гальмівного моменту на вихідному валу диференціального механізму при виключенні двигуна. Спосіб керування приводом скребкового конвеєра з планетарним редуктором здійснюється таким чином. 5 81015 При пускові двигуна привода, спочатку здійснюється його розгін до досягнення номінального значення робочої характеристики. В цей час до вихідного валу ди ференціального механізму, який являється першим ступенем планетарного редуктора, прикладається гальмівний момент, а на зовнішньому центральному колесі диференціального механізму гальмівний момент відсутній. У результаті розгін двигуна ї його ви хід на робочу характеристику відбувається при обертанні тільки центрального колеса диференціального механізму. При цьому водило диференціального механізму і відповідно конвеєр нерухомі. Коли пуск (розгін) двигуна закінчується, споживаючий ним струм знижується до мінімуму, що служить сигналом для знімання гальмівного моменту на вихідному валу ди ференціального механізму і створення гальмівного моменту на зовнішньому центральному колесі диференціального механізму. Для виключення динамічних навантажень у кінематичному ланцюзі приводу необхідно дотримуватись одночасного створення і зняття обох вищевказаних гальмівних моментів. Якщо розвиваєме приводом усиления достатнє щоб подолати момент опору руху, то конвеєр приходить в рух у робочому направленні. Якщо ланцюг конвеєра застібується або заклиниться і усиления на ньому перевищить допустиме, відбудеться збільшення струму у ланцюзі двигуна, що служить сигналом для створення гальмівного моменту на вихідному валу диференціального механізму і зняття гальмівного моменту на зовнішньому центральному колесі диференціального механізму. При цьому обертанні від електродвигуна перестане передаватися на вихідний вал редуктора і він загальмується усилениям, яке виникло у ланцюзі конвеєра і доповнено гальмівним моментом на водилі диференціального механізму. При виключенні конвеєра буде також знятий гальмівний момент на зовнішньому центральному колесі диференціального механізму і вихідний вал приводу конвеєра зупиняться без холостого (інерційного) вибігу. Попереднє (монтажне) натягування ланцюга конвеєра виробляється таким чином. Для регулювання усиления попереднього натягування ланцюга встановлюється необхідний зменшений гальмівний момент, який належить прикласти до зовнішнього центрального колеса диференціального механізму. Після включення і розгону електродвигуни, створюють зменшений гальмівний момент на зовнішньому центральному колесі диференціального механізму. Одночасно виробляють зняття гальмівного моменту на вихідному валу диференціального механізму. Вихідний вал диференціального механізму починає обертатися і відповідно, починає обертати вихідний вал приводу конвеєра. Ланцюг конвеєра натягується з усилениям, який відповідають заданому усилению попереднього натягування. Коли приводний вал зупиниться за 6 рахунок зменшеного гальмівного моменту прикладеного до зовнішнього центрального колеса диференціального механізму, виробляють зняття цього гальмівного моменту. Одночасно прикладають гальмівний момент на вихідний вал диференціального механізму. Вихідний вал приводу загальмівнується для проведення перемонтажа ланцюга конвеєра. Спосіб реалізується при виконанні приводу скребкового конвеєра з планетарним редуктором, який включає електродвигун, планетарний редуктор з диференціальним і планетарним механізмами, вихідний вал якого зв'язаний з привідною зірочкою конвеєра. Диференціальний механізм редуктора виконаний у вигляді центрального колеса з внутрішнім зачепленням, зв'язаного через першу керовану муфту з корпусом редуктора, і сателітів установлених на водилі. Вал водила диференціального механізму зв'язаний з вхідним валом планетарного механізму, а через другу керовану муфту зв'язану з корпусом редуктора. Для включення і першої і другої управляючих муфт привод забезпечений пристосуванням для синхронізації. Переважно виконання першої і другої управляючих муфт у вигляді дискових фрикційних муфт, при цьому перша управляюча муфта виконана нормально розімкнутою, а друга керована муфта - нормально замкнутою. Доцільно виконувати пристосування для синхронізації включення і виключення першої і другої керованих муфт у вигляді двох опозитно розміщених одноплунжерних гідравлічних циліндрів. Робочі камери цих гідравлічних циліндрів гідравлічно зв'язані між собою, а їх плунжери кінематично зв'язані з півмуфтами першої і другої керованих муфт. Конструкція приводу скребкового конвеєра з планетарним редуктором пояснюється кінематичною схемою, представленою на кресленні (Фіг.). Привід включає електродвигун 1 і планетарний редуктор з диференціальним 2 і планетарним 3 механізмами. Вихідний вал 4 редуктора зв'язаний з привідною зірочкою 5 конвеєра. Диференціальний механізм редуктора, виконаний у вигляді центрального колеса 6 з внутрішнім зачепленням, яке зв'язане через першу керовану муфту 7 з корпусом 8 редуктора, і сателітів 9 установлених на водилі 10. Вал водила 10, зв'язаний із вхідним валом планетарного механізму 3 і через другу керовану муфту 11 зв'язаний з корпусом 8 редуктора. Привід забезпечений пристосуванням для синхронізації включення і виключення першої 7 і другої 11 керованих муфт. Як перша 7, так і друга 11 керовані муфти можуть бути виконані у вигляді дискових фрикційних муфт, що являється найбільш переважним варіантом виконання. Але при цьому може бути застосована й інша конструкція керованих муфт, наприклад гідравлічна, кулачкова або зубчаста муфта. 7 81015 Перша керована муфта 7 установлена між центральним колесом 6 із внутрішнім зачепленням диференціального механізму і корпусом 8 редуктора виконана нормально розімкнутою. При її включенні центральне колесо 6 диференціального механізму жорстко з'єднується з корпусом 8 редуктора і диференціальний 2 механізм перетворення в планетарний. При включенні електродвигуна 1 приводу, відбувається розгін двигуна до виходу його на номінальний режим роботи. При цьому перша керована муфта 7 розімкнута, центральне колесо 6 диференціального механізму, зв'язане з валом двигуна обертається із сателітами 9 диференціального механізму, але поскільки водило 10, на якому розміщені сателіти 9, загальмівнано за допомогою другої керованої муфти 11, момент який крутиться передається на центральне колесо 6 із внутрішнім зачепленням диференціального механізму, яке вільно обертається. Після розгону двигуна 1, т.ч. перед досягненням номінального значення робочої характеристики, подається сигнал на включення першої керованої муфти 7. При цьому відбувається гальмування центрального колеса 6 диференціального механізму, оскільки півмуфта, закріплена на центральному колесі 6 замикається із півмуфтою, закріпленою на корпусі 8 редуктора. Одночасно відбувається розачеплення півмуфт другої керованої муфти 11, у результаті чого відбувається розгальмування водила редуктора. При цьому обертання від електродвигуна 3 передається на водило 10 диференціального механізму і відповідно, на вихідний вал 4 редуктора приводу конвеєра. Для одночасного спрацювання першої 7 і другої 11 керованих муфт необхідно застосування пристосування синхронізації. В залежності від конструкції керованих муфт, можуть бути застосовані і різні пристосування синхронізації. В описаній конструкції приводу скребкового конвеєра застосовано пристосування виконане у вигляді двох опозитно розміщених одноплунжерних гідравлічних циліндрів 12, 13 із загальною робочою камерою 14. При подачі робочої рідини під тиском Ρ у робочу камеру 14, плунжер гідравлічного циліндра 12, кінематично зв'язаний з приводом включення першої керованої муфти 7 притискає фрикційні диски друг до друга і при цьому відбувається гальмування центрального колеса 6 диференційного механізму. В цей час плунжер гідравлічного циліндра 13, кінематично зв'язаний з приводом включення другої керованої муфти 11 віджимає фрикційні диски півмуфт друг від др уга. При цьому відбувається зняття гальмівного моменту із валу водила диференціального механізму. Після цього крутний момент передається через планетарний механізм 3 на привідну зірочку 5 конвеєра. Без впливу плунжера гідравлічного циліндру 1;3 півмуфти другої керованої муфти 11 притиснуті друг до друга під дією пружини 15. Регулювання натягування ланцюга конвеєра виробляється шляхом зміни тиску робочої рідини, яка подається 8 у робочу камеру гідравлічних циліндрів. При цьому змінюється гальмівний момент на центральному колесі 6 диференціального механізму і його гальмування відбувається із обмеженим моментом, створюючи на вихідному валу редуктора заданий крутний момент і відповідно задану величину натягування скребкового ланцюга. В цьому режимі відбувається ковзання дисків обох півмуфт др уг відносно друга. В цілому пропонований спосіб керування приводом скребкового конвеєра з планетарним редуктором дозволяє за рахунок простих конструктивних засобів забезпечити підвищення пускових характеристик привода, ліквідувати холостий вибіг скребкового ланцюга, а також здійснити її необхідне рахункове попереднє натягування. Аналоги: 1. Заявка ЕР №0166511 МПК В65G23/26, публ. 01.02.86. 2. С.М.Кожевніков та інші "Механізми", Москва, "Ма шинобудування", 1976р., ст.188, 189 (прототип).
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of rake conveyor drive with planet gear and rake conveyer drive with planet gear
Автори англійськоюVysotskyi Hennadii Vasyliovych, Rikman Ihor Vladimirovich, Kovalchuk Oleksandr Mykolaiovych, Leusenko Anatolii Vasyliovych, Potapov Ihor Hryhorovych
Назва патенту російськоюСпособ управления приводом скребкового конвейера с планетарным редуктором и привод скребкового конвейера с планетарным редуктором
Автори російськоюВысоцкий Геннадий Васильевич, Рикман Игорь Владимирович, Ковальчук Александр Николаевич, Леусенко Анатолий Васильевич, Потапов Игорь Григорьевич
МПК / Мітки
МПК: B60W 10/18, B65G 23/00
Мітки: скребкового, конвеєра, редуктором, планетарним, приводом, спосіб, привід, керування
Код посилання
<a href="https://ua.patents.su/4-81015-sposib-keruvannya-privodom-skrebkovogo-konveehra-z-planetarnim-reduktorom-ta-privid-skrebkovogo-konveehra-z-planetarnim-reduktorom.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування приводом скребкового конвеєра з планетарним редуктором та привід скребкового конвеєра з планетарним редуктором</a>
Пристрій управління приводом вала відбору потужності з планетарним редуктором самохідного енергетичного засобу
Номер патенту: 42945
Опубліковано: 15.11.2001
Автори: Кузнецов Борис Олексійович, Михайловський Владилен Анатолійович, Садило Анатолій Олексійович
МПК: B60K 17/28
Мітки: пристрій, відбору, самохідного, енергетичного, потужності, засобу, управління, редуктором, планетарним, приводом, вала
Формула / Реферат:
Пристрій управління приводом вала відбору потужності з планетарним редуктором самохідного енергетичного засобу, що містить ведучий вал кінематичне зв'язаний з веденим валом через планетарний редуктор, водило якого наділено шківом зупинки, а сонячна шестірня наділена шківом включення, два стрічкових гальма, що взаємодіють з шківом зупинки і з шківом включення, важіль управління, шарнірно закріплений на опорі, упорний важіль, з'єднаний з...
Привід скребкового конвеєра

Номер патенту: 14777
Опубліковано: 15.09.2000
Автори: Леусенко Анатолій Васильович, Висоцький Геннадій Васильович, Косяковський Лев Якович, Петров Олександр Геннадійович, Сігалов Леонід Наумович
МПК: B65G 43/06
Мітки: скребкового, привід, конвеєра
Формула / Реферат:
Привод скребкового конвейера, включающий в себя электродвигатель с короткозамкнутым ротором, выходной вал которого через гидромуфту кинематически связан с редуктором для привода тягового органа скребкового конвейера, отличающийся тем, что аппаратура управления выполнена в виде включенного в силовую цепь электродвигателя, контактора с катушкой управления, установленных в силовой цепи электродвигателя двух реле контроля тока, которые настроены...
Пристрій для натягування ланцюгів скребкового конвеєра
Номер патенту: 77095
Опубліковано: 16.10.2006
Автори: Висоцький Геннадій Васильович, Рікман Ігор Володимирович, Ковальчук Олександр Миколайович, Литвак Григорій Олександрович, Волчинський Олександр Григорович, Леусенко Анатолій Васильович
МПК: B65G 23/00
Мітки: ланцюгів, пристрій, натягування, конвеєра, скребкового
Формула / Реферат:
1. Пристрій для натягування ланцюгів скребкового конвеєра, що включає зірочку і редуктор приводу конвеєра, а також самогальмівну черв'ячну передачу з незалежним приводом обертання і колесом, розміщеним у корпусі редуктора на одній осі з його ведучим валом, який відрізняється тим, що черв'ячне колесо роз'єднане з ведучим валом редуктора, виконане з можливістю їх з'єднання і установлене в корпусі на власних підшипниках у положенні постійного...
Блок приводу скребкового конвеєра
Номер патенту: 15034
Опубліковано: 15.06.2006
Автори: Лелека Ігор Тимофійович, Макаревич Анатолій Юрійович, Косарев Іван Васильович, Масальський Юрій Володимирович, Косарев Василь Васильович, Андрєєв Георгій Володимирович
МПК: B65G 23/00
Мітки: конвеєра, блок, скребкового, приводу
Формула / Реферат:
1. Блок приводу скребкового конвеєра, що містить редуктор і встановлений на ньому храповий стопорний пристрій, кінематично зв'язаний з валом редуктора, що має храпове колесо, собачку, встановлену з можливістю повороту і контакту з храповим колесом, пристрій притиснення собачки й елемент керування положенням собачки, який відрізняється тим, що храпове колесо встановлене на вхідному валу редуктора, собачка виконана у вигляді двоплечого важеля,...
Блочний механізм стопоріння тягового органа скребкового конвеєра
Номер патенту: 6490
Опубліковано: 16.05.2005
Автори: Андрєєв Георгій Володимирович, Гриценко Віталій Петрович, Косарев Василь Васильович, Макаревич Анатолій Юрійович, Сошенко Ігор Микитович, Довженко Володимир Іванович, Косарев Іван Васильович
МПК: B65G 23/00
Мітки: стопоріння, органа, тягового, скребкового, конвеєра, механізм, блочний
Формула / Реферат:
1. Блочний механізм стопоріння тягового органа скребкового конвеєра, що містить корпус, закріплений на корпусі редуктора приводу скребкового конвеєра, усередині якого розміщені два вали, розташовані в опорах корпусу, перший з яких кінематично зв'язаний із вхідною передачею редуктора, а другий, з установленим на ньому храповим колесом, - з першим валом, зубчаста муфта, що складається з двох півмуфт і обойми, підпружинена собачка, установлена с...
Попередній патент: Похідні піперидину, спосіб їх отримання та фармацевтична композиція на їх основі
Наступний патент: Колонковий снаряд
Випадковий патент: Вакуумний вимикач з привідним пристроєм та блоком приводу полюса