Система збирання даних по розподільній електромережі змінного струму
Номер патенту: 81692
Опубліковано: 25.01.2008
Формула / Реферат
1. Система збирання даних по розподільній електромережі змінного струму, що включає один головний вузол і кілька підпорядкованих вузлів, у якій головний вузол випромінює синхросигнал заздалегідь відомого виду, що складається з одного або декількох символів, який одночасно приймається всіма підпорядкованими вузлами, яка відрізняється тим, що як події символьної синхронізації всі вузли системи використовують моменти перетинання нульового рівня основною гармонікою силової напруги електромережі, а головний вузол випромінює вищевказаний синхросигнал строго періодично, через рівні інтервали часу, при цьому підпорядкований вузол з номером N передає свої дані протягом N-ного напівперіоду основної напруги мережі, відлічуючи від моменту закінчення синхросигналу.
2. Система збирання даних за п. 1, яка відрізняється тим, що у випадку тимчасової відсутності синхросигналу підпорядковані вузли продовжують передавати дані в межах "своїх" напівперіодів основної напруги мережі, розраховуючи їхнє часове положення по величині відомого їм періоду випромінювання синхросигналу.
3. Система збирання даних за будь-яким з пп. 1, 2, яка відрізняється тим, що джерелом синхросигналу є не головний вузол системи, а окремий від нього пристрій.
4. Система збирання даних за будь-яким з пп. 1, 2, 3, яка відрізняється тим, що синхросигнал піддають модуляції та використовують також для широкомовної передачі даних від головного вузла до підпорядкованих.
5. Система збирання даних за будь-яким з пп. 1, 2, 3, яка відрізняється тим, що всі сигнали, випромінювані головним і підпорядкованим вузлами, мають тривалість, що дорівнює 1/3 напівперіоду мережної напруги, та центровані по відношенню до моментів перетинання нульового рівня основною гармонікою силової напруги електромережі.
Текст
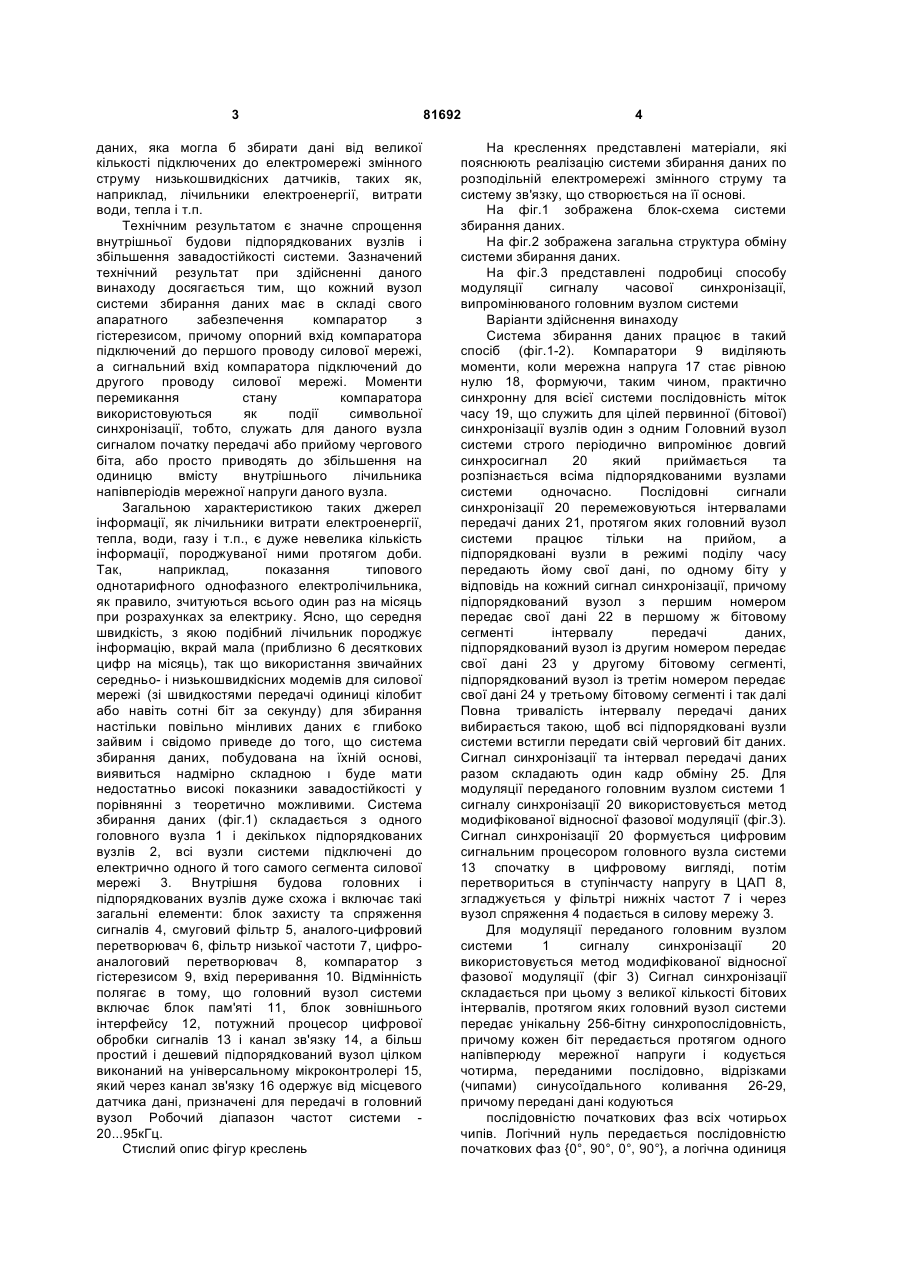
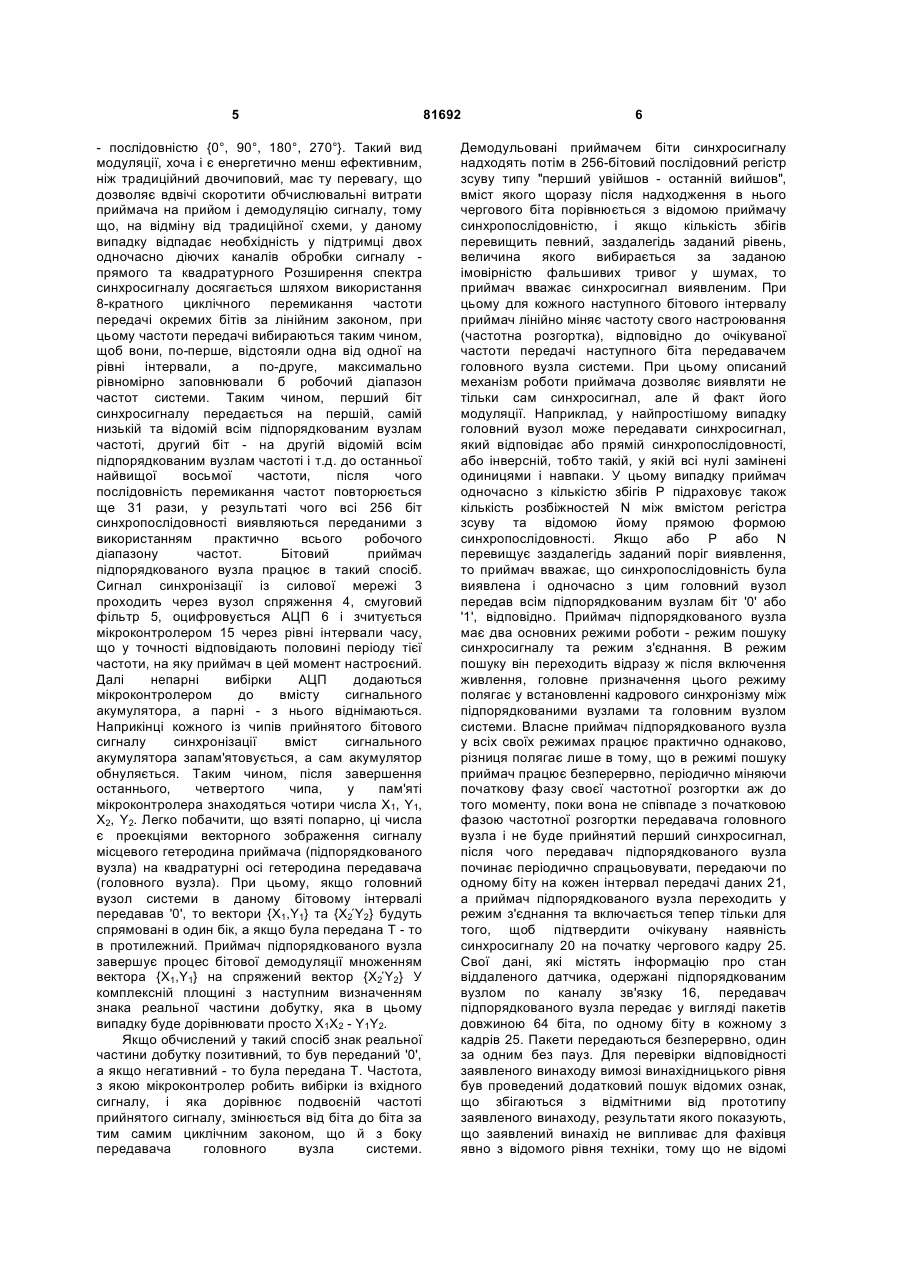
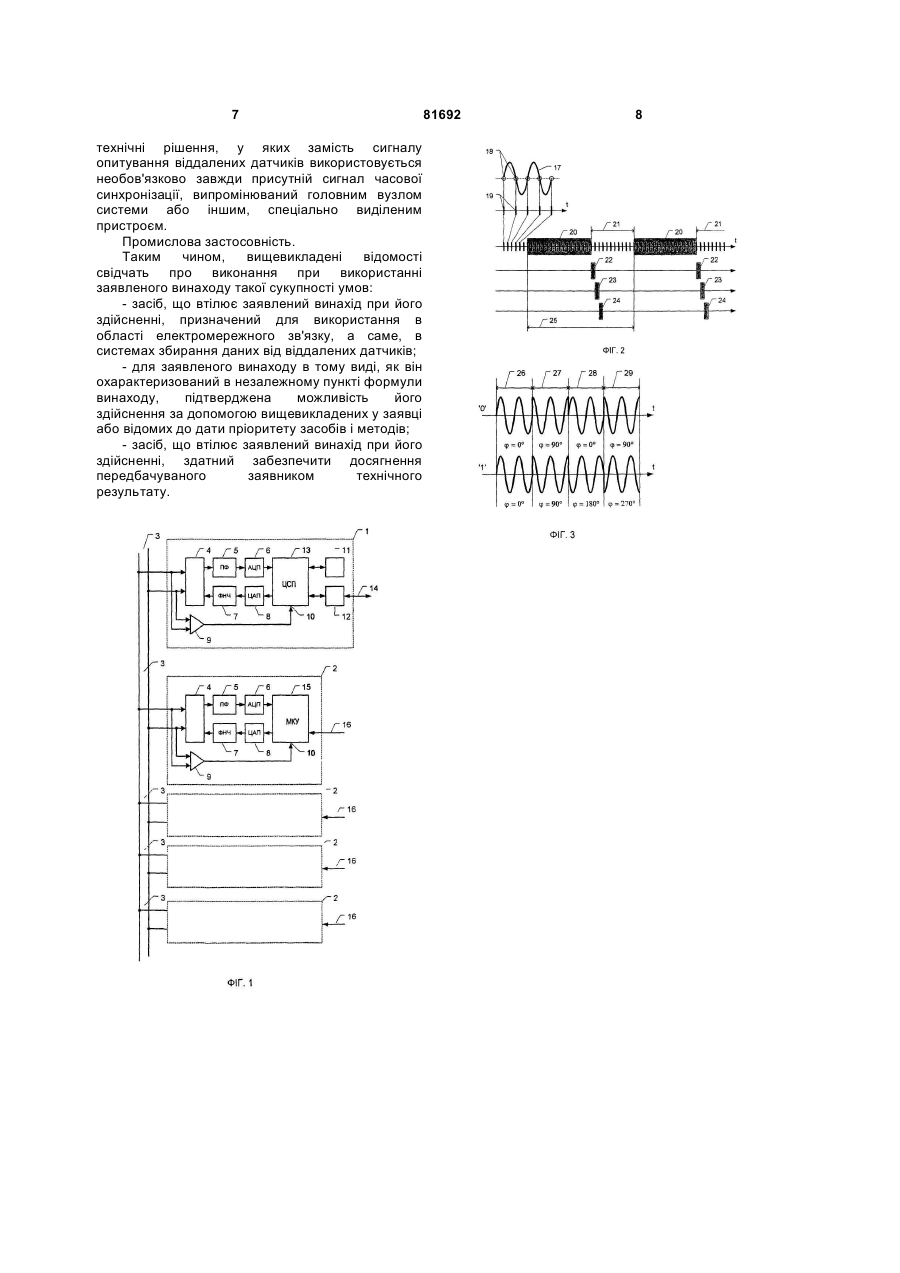
1. Система збирання даних по розподільній електромережі змінного струму, що включає один головний вузол і кілька підпорядкованих вузлів, у якій головний вузол випромінює синхросигнал заздалегідь відомого виду, що складається з одного або декількох символів, який одночасно приймається всіма підпорядкованими вузлами, яка відрізняється тим, що як події символьної синхронізації всі вузли системи використовують моменти перетинання нульового рівня основною гармонікою силової напруги електромережі, а головний вузол випромінює вищевказаний синхросигнал строго періодично, через рівні інтервали часу, при цьому підпорядкований вузол C2 2 (19) 1 3 даних, яка могла б збирати дані від великої кількості підключених до електромережі змінного струму низькошвидкісних датчиків, таких як, наприклад, лічильники електроенергії, витрати води, тепла і т.п. Технічним результатом є значне спрощення внутрішньої будови підпорядкованих вузлів і збільшення завадостійкості системи. Зазначений технічний результат при здійсненні даного винаходу досягається тим, що кожний вузол системи збирання даних має в складі свого апаратного забезпечення компаратор з гістерезисом, причому опорний вхід компаратора підключений до першого проводу силової мережі, а сигнальний вхід компаратора підключений до другого проводу силової мережі. Моменти перемикання стану компаратора використовуються як події символьної синхронізації, тобто, служать для даного вузла сигналом початку передачі або прийому чергового біта, або просто приводять до збільшення на одиницю вмісту внутрішнього лічильника напівперіодів мережної напруги даного вузла. Загальною характеристикою таких джерел інформації, як лічильники витрати електроенергії, тепла, води, газу і т.п., є дуже невелика кількість інформації, породжуваної ними протягом доби. Так, наприклад, показання типового однотарифного однофазного електролічильника, як правило, зчитуються всього один раз на місяць при розрахунках за електрику. Ясно, що середня швидкість, з якою подібний лічильник породжує інформацію, вкрай мала (приблизно 6 десяткових цифр на місяць), так що використання звичайних середньо- і низькошвидкісних модемів для силової мережі (зі швидкостями передачі одиниці кілобит або навіть сотні біт за секунду) для збирання настільки повільно мінливих даних є глибоко зайвим і свідомо приведе до того, що система збирання даних, побудована на їхній основі, виявиться надмірно складною ι буде мати недостатньо високі показники завадостійкості у порівнянні з теоретично можливими. Система збирання даних (фіг.1) складається з одного головного вузла 1 і декількох підпорядкованих вузлів 2, всі вузли системи підключені до електрично одного й того самого сегмента силової мережі 3. Внутрішня будова головних і підпорядкованих вузлів дуже схожа і включає такі загальні елементи: блок захисту та спряження сигналів 4, смуговий фільтр 5, аналого-цифровий перетворювач 6, фільтр низької частоти 7, цифроаналоговий перетворювач 8, компаратор з гістерезисом 9, вхід переривання 10. Відмінність полягає в тому, що головний вузол системи включає блок пам'яті 11, блок зовнішнього інтерфейсу 12, потужний процесор цифрової обробки сигналів 13 і канал зв'язку 14, а більш простий і дешевий підпорядкований вузол цілком виконаний на універсальному мікроконтролері 15, який через канал зв'язку 16 одержує від місцевого датчика дані, призначені для передачі в головний вузол Робочий діапазон частот системи 20...95кГц. Стислий опис фігур креслень 81692 4 На кресленнях представлені матеріали, які пояснюють реалізацію системи збирання даних по розподільній електромережі змінного струму та систему зв'язку, що створюється на її основі. На фіг.1 зображена блок-схема системи збирання даних. На фіг.2 зображена загальна структура обміну системи збирання даних. На фіг.3 представлені подробиці способу модуляції сигналу часової синхронізації, випромінюваного головним вузлом системи Варіанти здійснення винаходу Система збирання даних працює в такий спосіб (фіг.1-2). Компаратори 9 виділяють моменти, коли мережна напруга 17 стає рівною нулю 18, формуючи, таким чином, практично синхронну для всієї системи послідовність міток часу 19, що служить для цілей первинної (бітової) синхронізації вузлів один з одним Головний вузол системи строго періодично випромінює довгий синхросигнал 20 який приймається та розпізнається всіма підпорядкованими вузлами системи одночасно. Послідовні сигнали синхронізації 20 перемежовуються інтервалами передачі даних 21, протягом яких головний вузол системи працює тільки на прийом, а підпорядковані вузли в режимі поділу часу передають йому свої дані, по одному біту у відповідь на кожний сигнал синхронізації, причому підпорядкований вузол з першим номером передає свої дані 22 в першому ж бітовому сегменті інтервалу передачі даних, підпорядкований вузол із другим номером передає свої дані 23 у другому бітовому сегменті, підпорядкований вузол із третім номером передає свої дані 24 у третьому бітовому сегменті і так далі Повна тривалість інтервалу передачі даних вибирається такою, щоб всі підпорядковані вузли системи встигли передати свій черговий біт даних. Сигнал синхронізації та інтервал передачі даних разом складають один кадр обміну 25. Для модуляції переданого головним вузлом системи 1 сигналу синхронізації 20 використовується метод модифікованої відносної фазової модуляції (фіг.3). Сигнал синхронізації 20 формується цифровим сигнальним процесором головного вузла системи 13 спочатку в цифровому вигляді, потім перетвориться в ступінчасту напругу в ЦАП 8, згладжується у фільтрі нижніх частот 7 і через вузол спряження 4 подається в силову мережу 3. Для модуляції переданого головним вузлом системи 1 сигналу синхронізації 20 використовується метод модифікованої відносної фазової модуляції (фіг 3) Сигнал синхронізації складається при цьому з великої кількості бітових інтервалів, протягом яких головний вузол системи передає унікальну 256-бітну синхропослідовність, причому кожен біт передається протягом одного напівперюду мережної напруги і кодується чотирма, переданими послідовно, відрізками (чипами) синусоїдального коливання 26-29, причому передані дані кодуються послідовністю початкових фаз всіх чотирьох чипів. Логічний нуль передається послідовністю початкових фаз {0°, 90°, 0°, 90°}, а логічна одиниця 5 - послідовністю {0°, 90°, 180°, 270°}. Такий вид модуляції, хоча і є енергетично менш ефективним, ніж традиційний двочиповий, має ту перевагу, що дозволяє вдвічі скоротити обчислювальні витрати приймача на прийом і демодуляцію сигналу, тому що, на відміну від традиційної схеми, у даному випадку відпадає необхідність у підтримці двох одночасно діючих каналів обробки сигналу прямого та квадратурного Розширення спектра синхросигналу досягається шляхом використання 8-кратного циклічного перемикання частоти передачі окремих бітів за лінійним законом, при цьому частоти передачі вибираються таким чином, щоб вони, по-перше, відстояли одна від одної на рівні інтервали, а по-друге, максимально рівномірно заповнювали б робочий діапазон частот системи. Таким чином, перший біт синхросигналу передається на першій, самій низькій та відомій всім підпорядкованим вузлам частоті, другий біт - на другій відомій всім підпорядкованим вузлам частоті і т.д. до останньої найвищої восьмої частоти, після чого послідовність перемикання частот повторюється ще 31 рази, у результаті чого всі 256 біт синхропослідовності виявляються переданими з використанням практично всього робочого діапазону частот. Бітовий приймач підпорядкованого вузла працює в такий спосіб. Сигнал синхронізації із силової мережі 3 проходить через вузол спряження 4, смуговий фільтр 5, оцифровується АЦП 6 і зчитується мікроконтролером 15 через рівні інтервали часу, що у точності відповідають половині періоду тієї частоти, на яку приймач в цей момент настроєний. Далі непарні вибірки АЦП додаються мікроконтролером до вмісту сигнального акумулятора, а парні - з нього віднімаються. Наприкінці кожного із чипів прийнятого бітового сигналу синхронізації вміст сигнального акумулятора запам'ятовується, а сам акумулятор обнуляється. Таким чином, після завершення останнього, четвертого чипа, у пам'яті мікроконтролера знаходяться чотири числа Χ1, Υ1, Χ2, Υ2. Легко побачити, що взяті попарно, ці числа є проекціями векторного зображення сигналу місцевого гетеродина приймача (підпорядкованого вузла) на квадратурні осі гетеродина передавача (головного вузла). При цьому, якщо головний вузол системи в даному бітовому інтервалі передавав '0', то вектори {Χ1,Υ1} та {Χ2Ύ2} будуть спрямовані в один бік, а якщо була передана Τ - то в протилежний. Приймач підпорядкованого вузла завершує процес бітової демодуляції множенням вектора {Χ1,Υ1} на спряжений вектор {Χ2Ύ2} У комплексній площині з наступним визначенням знака реальної частини добутку, яка в цьому випадку буде дорівнювати просто Х1Х2 - Y1Y2. Якщо обчислений у такий спосіб знак реальної частини добутку позитивний, то був переданий '0', а якщо негативний - то була передана Т. Частота, з якою мікроконтролер робить вибірки із вхідного сигналу, і яка дорівнює подвоєній частоті прийнятого сигналу, змінюється від біта до біта за тим самим циклічним законом, що й з боку передавача головного вузла системи. 81692 6 Демодульовані приймачем біти синхросигналу надходять потім в 256-бітовий послідовний регістр зсуву типу "перший увійшов - останній вийшов", вміст якого щоразу після надходження в нього чергового біта порівнюється з відомою приймачу синхропослідовністю, і якщо кількість збігів перевищить певний, заздалегідь заданий рівень, величина якого вибирається за заданою імовірністю фальшивих тривог у шумах, то приймач вважає синхросигнал виявленим. При цьому для кожного наступного бітового інтервалу приймач лінійно міняє частоту свого настроювання (частотна розгортка), відповідно до очікуваної частоти передачі наступного біта передавачем головного вузла системи. При цьому описаний механізм роботи приймача дозволяє виявляти не тільки сам синхросигнал, але й факт його модуляції. Наприклад, у найпростішому випадку головний вузол може передавати синхросигнал, який відповідає або прямій синхропослідовності, або інверсній, тобто такій, у якій всі нулі замінені одиницями і навпаки. У цьому випадку приймач одночасно з кількістю збігів Ρ підраховує також кількість розбіжностей N між вмістом регістра зсуву та відомою йому прямою формою синхропослідовності. Якщо або Ρ або N перевищує заздалегідь заданий поріг виявлення, то приймач вважає, що синхропослідовність була виявлена і одночасно з цим головний вузол передав всім підпорядкованим вузлам біт '0' або '1', відповідно. Приймач підпорядкованого вузла має два основних режими роботи - режим пошуку синхросигналу та режим з'єднання. В режим пошуку він переходить відразу ж після включення живлення, головне призначення цього режиму полягає у встановленні кадрового синхронізму між підпорядкованими вузлами та головним вузлом системи. Власне приймач підпорядкованого вузла у всіх своїх режимах працює практично однаково, різниця полягає лише в тому, що в режимі пошуку приймач працює безперервно, періодично міняючи початкову фазу своєї частотної розгортки аж до того моменту, поки вона не співпаде з початковою фазою частотної розгортки передавача головного вузла і не буде прийнятий перший синхросигнал, після чого передавач підпорядкованого вузла починає періодично спрацьовувати, передаючи по одному біту на кожен інтервал передачі даних 21, а приймач підпорядкованого вузла переходить у режим з'єднання та включається тепер тільки для того, щоб підтвердити очікувану наявність синхросигналу 20 на початку чергового кадру 25. Свої дані, які містять інформацію про стан віддаленого датчика, одержані підпорядкованим вузлом по каналу зв'язку 16, передавач підпорядкованого вузла передає у вигляді пакетів довжиною 64 біта, по одному біту в кожному з кадрів 25. Пакети передаються безперервно, один за одним без пауз. Для перевірки відповідності заявленого винаходу вимозі винахідницького рівня був проведений додатковий пошук відомих ознак, що збігаються з відмітними від прототипу заявленого винаходу, результати якого показують, що заявлений винахід не випливає для фахівця явно з відомого рівня техніки, тому що не відомі 7 технічні рішення, у яких замість сигналу опитування віддалених датчиків використовується необов'язково завжди присутній сигнал часової синхронізації, випромінюваний головним вузлом системи або іншим, спеціально виділеним пристроєм. Промислова застосовність. Таким чином, вищевикладені відомості свідчать про виконання при використанні заявленого винаходу такої сукупності умов: - засіб, що втілює заявлений винахід при його здійсненні, призначений для використання в області електромережного зв'язку, а саме, в системах збирання даних від віддалених датчиків; - для заявленого винаходу в тому виді, як він охарактеризований в незалежному пункті формули винаходу, підтверджена можливість його здійснення за допомогою вищевикладених у заявці або відомих до дати пріоритету засобів і методів; - засіб, що втілює заявлений винахід при його здійсненні, здатний забезпечити досягнення передбачуваного заявником технічного результату. 81692 8
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for data acquision in alternating-currrent distribution network
Автори англійськоюSokolov Yurii Borysovych, Sakharov Valerii Viktorovych
Назва патенту російськоюСистема сбора данных в распределительной электросети переменного тока
Автори російськоюСоколов Юрий Борисович, Сахаров Валерий Викторович
МПК / Мітки
МПК: G08B 25/01, H04B 3/54
Мітки: збирання, змінного, розподільний, система, струму, електромережі, даних
Код посилання
<a href="https://ua.patents.su/4-81692-sistema-zbirannya-danikh-po-rozpodilnijj-elektromerezhi-zminnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Система збирання даних по розподільній електромережі змінного струму</a>
Пристрій безпровідної передачі даних (варіанти) та спосіб керування потоком даних у розподільній системі передачі даних (варіанти)
Номер патенту: 75914
Опубліковано: 15.06.2006
Автори: Кімбалл Роберт Г., Кармі Гаді, Бендер Пол І., роб Метью С.
МПК: H04L 12/56, H04L 12/28
Мітки: розподільний, передачі, варіанти, керування, пристрій, безпровідної, спосіб, даних, потоком, системі
Формула / Реферат:
1. Пристрій безпровідної передачі даних, який включає:- сукупність пунктів доступу до мережі, причому кожний із зазначеної сукупності пунктів доступу до мережі має конфігурацію для: зв‘язку з щонайменше двома з сукупності маршрутизаторів і зв'язку з щонайменше одним віддаленим користувачем.2. Пристрій за п. 1, який відрізняється тим, що додатково має сукупність опорних точок, причому кожна із зазначеної сукупності...
Система діагностики двигуна змінного струму
Номер патенту: 14925
Опубліковано: 15.06.2006
Автори: Дюжиков Олександр Олександрович, Гавриленко Олег Іванович
МПК: G05D 1/03, H02K 17/00
Мітки: струму, змінного, система, двигуна, діагностики
Формула / Реферат:
Система діагностики двигуна змінного струму, що містить асинхронний двигун, яка відрізняється тим, що в неї введено обчислювач, датчики струму та магнітного потоку і суматор, вихід системи з'єднаний з входами датчиків струму і магнітного потоку, виходи яких через суматор з'єднані з обчислювачем, вихід якого підключений до двигуна.
Система електропостачання змінного струму залізниці

Номер патенту: 54127
Опубліковано: 15.09.2005
Автори: Оверченко Ірина Степанівна, Русак Євген Вікторович, Чорний Станіслав Іванович
Мітки: електропостачання, змінного, струму, система, залізниці
Формула / Реферат:
1. Вузол з'єднання фланців корпусів очисного комбайна, що містить два фланці, з'єднаних один з одним болтами, який відрізняється тим, що він оснащений додатковим силовим елементом, виконаним у вигляді втулки, що без радіального зазору встановлена своїми кінцями в проточки, виконані в кожному фланці в місці одного болтового з'єднання, при цьому через втулку з зазором просмикнутий болт.2. Вузол за п. 1, який відрізняється тим, що на...
Система електропостачання залізниці змінного струму
Номер патенту: 54127
Опубліковано: 17.02.2003
Автори: Русак Євген Вікторович, Оверченко Ірина Степанівна, Чорний Станіслав Іванович
Мітки: залізниці, система, струму, електропостачання, змінного
Формула / Реферат:
1. Вузол з'єднання фланців корпусів очисного комбайна, що містить два фланці, з'єднаних один з одним болтами, який відрізняється тим, що він оснащений додатковим силовим елементом, виконаним у вигляді втулки, що без радіального зазору встановлена своїми кінцями в проточки, виконані в кожному фланці в місці одного болтового з'єднання, при цьому через втулку з зазором просмикнутий болт.2. Вузол за п. 1, який відрізняється тим, що на...
Трифазна електроенергетична система змінного струму
Номер патенту: 5768
Опубліковано: 15.03.2005
Автори: Шпорт Андрій Володимирович, Краснов Володимир Васильович
МПК: H02J 3/00
Мітки: електроенергетична, змінного, трифазна, система, струму
Формула / Реферат:
Трифазна електроенергетична система змінного струму, що містить джерела і споживачі електроенергії, початки обмоток яких пофазно підключені до основної трипровідної лінії, яка відрізняється тим, що кінці обмоток джерел і споживачів пофазно підключені до додаткової трипровідної лінії, віддаленої в просторі від основної трипровідної лінії.
Попередній патент: Ендопротез та спосіб лікування патологій скронево-нижньощелепного суглоба
Наступний патент: Тарувальний стенд рогалевича
Випадковий патент: Спосіб селективного одержання оцтової кислоти шляхом каталітичного окиснення етану та/або етилену та каталізатор, який застосовується в способі