Спосіб навантаженого резервування вимірників тримірного руху транспортних засобів
Номер патенту: 81711
Опубліковано: 25.01.2008
Автори: Бандура Іван Миколайович, Корженко Олексій Васильович
Формула / Реферат
Спосіб навантаженого резервування вимірників тримірного руху транспортних засобів, який полягає у тому, що вимірюють проекції вектора на три взаємно перпендикулярні напрямки, співпадаючі з осями керування транспортного засобу, й логічно обробляють сигнали виміру, який відрізняється тим, що одночасно з виміром проекцій вектора на осі керування транспортного засобу вимірюють проекції вектора на чотири додаткові осі, розраховують проекції вектора на осі керування по вимірах на додаткові осі, розраховують проекції вектора на додаткові осі по вимірах проекцій на осі керування, визначають несправні датчики по осях керування шляхом порівняння обмірюваних і розрахованих проекцій на ці осі, визначають несправні датчики по додаткових осях шляхом порівняння обмірюваних і розрахованих проекцій на додаткові осі.
Текст
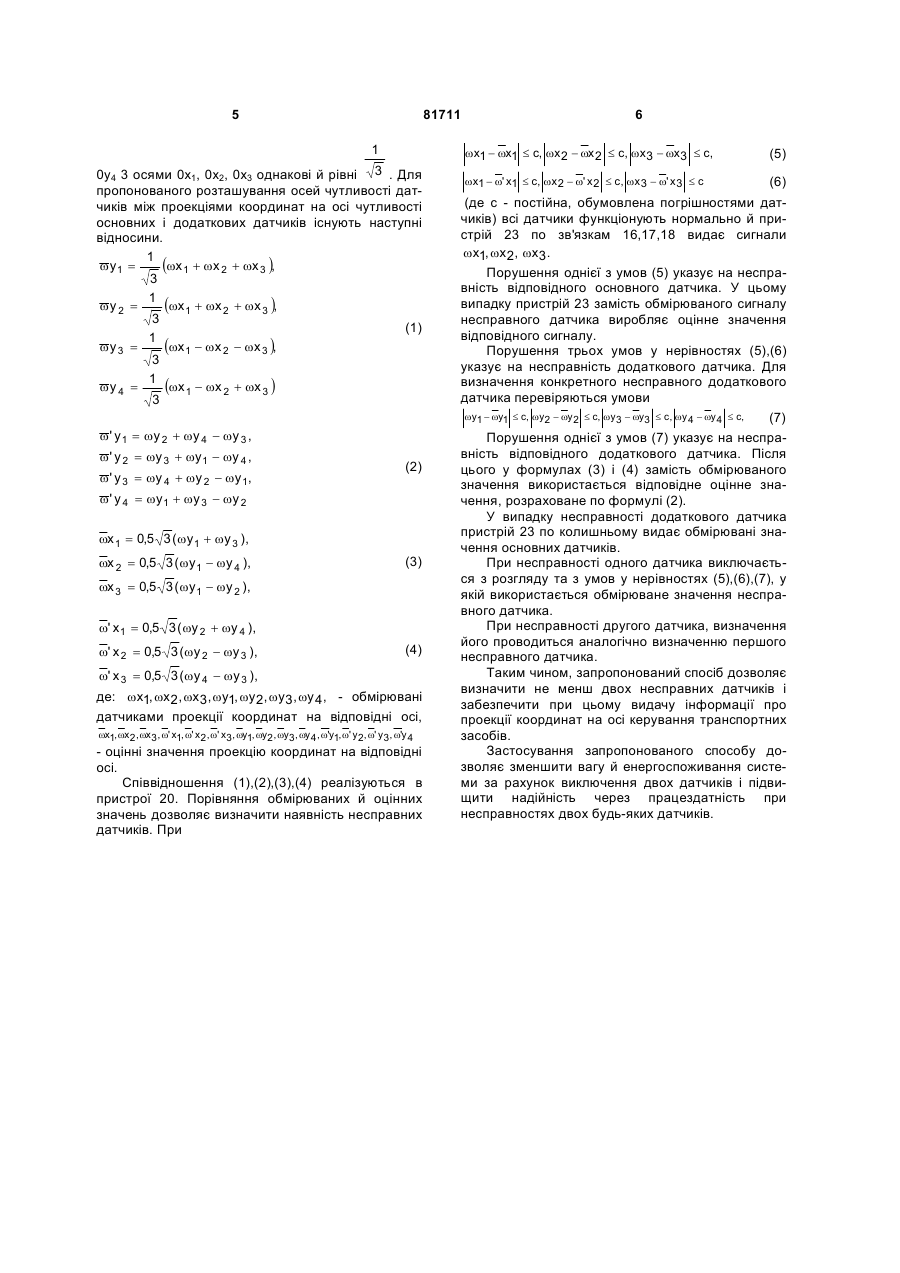
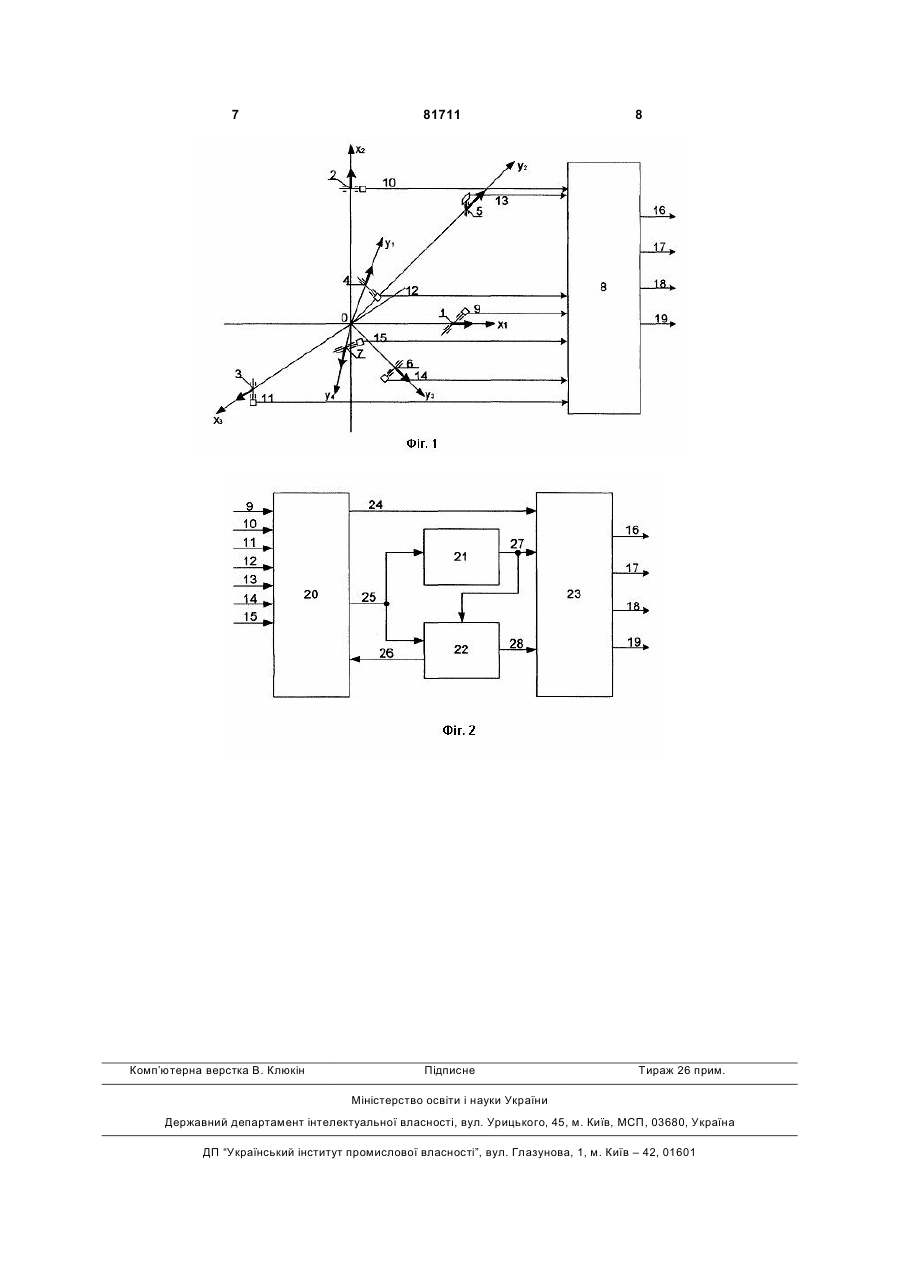
Спосіб навантаженого резервування вимірників тримірного руху транспортних засобів, який полягає у тому, що вимірюють проекції вектора на три взаємно перпендикулярні напрямки, співпадаючі з осями керування транспортного засобу, й логічно обробляють сигнали виміру, який відрізняється тим, що одночасно з виміром проекцій вектора на осі керування транспортного засобу вимірюють проекції вектора на чотири додаткові осі, розраховують проекції вектора на осі керування по вимірах на додаткові осі, розраховують проекції вектора на додаткові осі по вимірах проекцій на осі керування, визначають несправні датчики по осях керування шляхом порівняння обмірюваних і розрахованих проекцій на ці осі, визначають несправні датчики по додаткових осях шляхом порівняння обмірюваних і розрахованих проекцій на додаткові осі. Передбачуваний винахід використовується в електровимірювальній техніці, авіакосмічній техніці, системах електропостачання, електричних залізницях. Відомий спосіб не навантаженого (холодного) резерву вимірників тримірного руху транспортних засобів, заснований на тому, що вимірюють в кожному каналі керування проекцію вектора за допомогою одного працюючого датчика й одного або більше резервних (не навантажених) датчиків і підключають резервні датчики після несправностей основного датчика [А.Н. Жирабок. Соросовский образовательный журнал. - 2001. - том 7.-№8.С112]. Недоліком такого способу є тимчасова непрацездатність системи при відмові працюючого датчика, через складність оперативного визначення несправності датчика і значного часу підготовки резервного датчика (наприклад, через розгін гідромотора при використанні гіроскопічних датчиків). На окремих відповідальних ділянок руху не допускається навіть тимчасова непрацездатність систе ми, тому що вона може привести до аварійної ситуації. Зазначений недолік усувається при використанні навантаженого (гарячого) резервування. Відомий найбільш близький по технічній сутності спосіб навантаженого резервування вимірників тримірного руху транспортних засобів, заснований на тому, що вимірюють проекції вектора на три взаємно-перпендикулярних напрямки, співпадаючих з осями керування транспортного засобу й логічно обробляють сигнали виміру [А.Н. Жирабок. Соросовский образовательный журнал. - 2001. том 7. - №8. – С113]. Недоліком цього способу є велика вага й енергоспоживання системи через велику кількість датчиків для вимірювання проекцій вектора і невисока надійність через непрацездатність системи при несправності двох датчиків в одному каналі. Задача запропонованого винаходу є підвищення надійності, зменшення ваги й енергоспоживання блоку вимірників. Поставлена задача досягається тим, що в способі навантаженого резервування вимірників (19) UA (11) 81711 (13) C2 (21) a200606068 (22) 01.06.2006 (24) 25.01.2008 (72) БАНДУРА ІВАН МИКОЛАЙОВИЧ, UA, КОРЖЕНКО ОЛЕКСІЙ ВАСИЛЬОВИЧ, UA (73) НАЦІОНАЛЬНИЙ АЕРОКОСМІЧНИЙ УНІВЕРСИТЕТ ІМ. М.Є.ЖУКОВСЬКОГО "ХАРКІВСЬКИЙ АВІАЦІЙНИЙ ІНСТИТУТ", UA (56) US 5757641, 26.05.1998 WO 2006038669, 13.04.2006 WO 9635594, 14.11.1996 Андреев В.А. и др. Бесплатформенный инерциальный блок системы управления автономного космического буксира ракеты носителя "Днепр", ЦНИИ "Электоприбор". // Гироскопия и навигация. - № 2(53). - 2006. Жирабок А.Н. Основные понятия теории надежности. Соросовский образовательный журнал. 2001. - т. 7. - №8. - С. 108-114. 3 тримірного руху транспортних засобів, заснованого на тому, що вимірюють проекції вектора на три взаємно-перпендикулярних напрямки, співпадаючих з осями керування транспортного засобу й логічно обробляють сигнали виміру, згідно з винаходом одночасно з виміром проекцій вектора на осі керування транспортного засобу, вимірюють проекції вектора на чотири додаткові осі, які розташовані усередині окремих квадрантів, утворених взаємно-перпендикулярними площинами, що проходять через осі керування транспортного засобу, розраховують проекції вектора на осі керування по вимірах проекцій на додаткові осі, розраховують проекції вектора на додаткові осі по вимірах проекцій на осі керування, визначають несправні датчики по осях керування шляхом обмірюваних і розрахованих проекцій на ці осі, визначають несправні датчики по додаткових осях шляхом порівняння обмірюваних і розрахованих проекцій на додаткові осі. Сукупне застосування введених прийомів дозволило оперативно визначати несправні датчики й відключати їх при меншій кількості датчиків. Це істотно підвищує надійність, зменшує вагу і енергоспоживання блоку вимірників і дозволяє одержати істотний позитивний ефект. Для пояснення запропонованого способу на Фіг.1 показане розташування датчиків тримірного руху. На Фіг.2 наведена блок-схема пристрою контролю датчиків. У розгляд уведені дві системи координат: 0х1, 0х2, 0х3 - права прямокутна, пов'язана із транспортним засобом, система координат, осі якої є осями керування транспортних засобів по трьох каналах керування й 0у1, 0у2, 0у3 -косокутна, пов'язана із транспортним засобом, система координат, осі якої розташовані усередині окремих квадратів, утворених взаємно-перпендикулярними площинами, що проходять через осі 0х1, 0х2, 0х3 і не збігаються з останніми. На кресленнях представлені основні датчики 1,2,3, осі чутливості яких спрямовані уздовж осей 0х1, 0х2, 0х3 відповідно, додаткові датчики 4,5,6,7, осі чутливості яких спрямовані уздовж осей oу1, oу2, oу3 й oу4 відповідно, пристрій 8 контролю датчиків, зв'язки 9,10,11 по координатах, обмірюваних основними датчиками, зв'язки 12,13,14,15 по координатах, обмірюваним додатковими датчиками, зв'язки 16,17,18 по проекціях керованої координати на осі транспортного засобу, зв'язок 19 по командах на відключення несправних датчиків, пристрій 20 оцінки й порівняння, пристрій 21 визначення першого несправного датчика, пристрій 22 визначення другого несправного датчика, блок 23 формування проекцій керованої координати на осі керування транспортного засобу, зв'язок 24 по обмірюваних й оцінних проекціях керованої координати на осі керування транспортного засобу, зв'язок 25 по неузгодженостях між обмірюваними й оцінними проекціями керованої координати, зв'язок 26 по оцінним значенням координати першого несправного датчика, зв'язок 27 за інформацією про перший несправний датчик, зв'язок 28 за інформацією про другий несправний датчик. 81711 4 Запропонований спосіб реалізується наступним чином. У процесі руху транспортного засобу за допомогою датчиків 1,2,3,4,5,6,7 вимірюють проекції координат на їхні осі чутливості, сигнали про ці проекції по зв'язкам 9,10,11,12,13,14,15 надходять у пристрій 8. В запропонованому способі пристрій 8 функціонує наступним чином. На підставі сигналів 9,10,11 в пристрої 20 визначають оцінні значення проекцій координат на осі чутливості додаткових датчиків, а на підставі сигналів 12,13,14,15 визначають по два оцінних значення проекцій координат на осі чутливості основних датчиків. Обмірювані й оцінні значення проекцій координат на осі чутливості основних датчиків надходять по зв'язку 24 у пристрій 23, в результаті при відсутності несправних датчиків формують сигнали 16,17,18 і не формують сигнал 19. У даному способі в пристрої 20 порівнюють обмірювані й оцінні сигнали на всі осі чутливості датчиків. У випадку нормального функціонування (при відсутності несправних датчиків) обмірювані значення проекцій координат збігаються з відповідними оцінними значеннями проекцій координат. При несправності одного з датчиків за допомогою пристрою 20 виробляють сигнали неузгодженості між обмірюваними й оцінними значеннями проекцій координат, які по зв'язку 25 надходять у пристрій 21. Пристрій 21 на підставі аналізу сигналів по зв'язку 25 визначає несправний датчик і по зв'язку 27 інформація про несправний датчик надходить у пристрої 22 й 23. Пристрій 23 виробляє сигнали 16,17,18 з урахуванням несправного датчика й виробляє сигнал 19 на відключення цього несправного датчика. При несправності другого датчика за допомогою пристрою 20 виробляють сигнали, які по зв'язку 25 надходять у пристрій 22. Пристрій 22 на підставі аналізу сигналів по зв'язку 25 й 27 визначає другий несправний датчик і виробляє сигнали 26,28. Сигнал 26 надходить у пристрій 20, що з урахуванням цього сигналу виробляє сигнали 24. Сигнал 28 надходить у пристрій 23, що виробляє сигнали 16,17,18 з обліком другого несправного датчика й виробляє сигнал 19 на відключення цього датчика. У відомих системах навантаженого резервування, коли осі чутливості основних і резервних датчиків збігаються з осями керування транспортного засобу, для забезпечення працездатності системи при несправності двох датчиків необхідно чотири комплекти датчиків, тобто дванадцять штук замість пропонованих семи. У порівнянні з відомим способом навантаженого резервування, який потребує три комплекти датчиків, запропонований спосіб має більше високу надійність через працездатність при несправності двох будь-яких датчиків. Нижче наведене коротке математичне обґрунтування працездатності запропонованого способу при несправності двох датчиків. Для простоти припустимо, що напрямні косинуси осів 0у1, 0у2, 0у3 й 5 81711 1 wx1 - wx1 £ c, wx2 - wx 2 £ c, wx3 - wx3 £ c, 0у4 3 осями 0х1, 0х2, 0х3 однакові й рівні 3 . Для пропонованого розташування осей чутливості датчиків між проекціями координат на осі чутливості основних і додаткових датчиків існують наступні відносини. 1 (wx 1 + wx 2 + wx 3 ), w y1 = 3 1 wy 2 = (wx 1 + wx 2 + wx 3 ), 3 (1) 1 wy 3 = (wx 1 - wx 2 - wx 3 ), 3 1 wy 4 = (wx 1 - wx 2 + wx 3 ) 3 w ' y 1 = wy 2 + wy 4 - wy 3 , w ' y 2 = wy 3 + wy 1 - wy 4 , w ' y 3 = wy 4 + wy 2 - wy 1, (2) w ' y 4 = wy 1 + wy 3 - wy 2 wx 1 = 0,5 3 ( wy 1 + wy 3 ), wx 2 = 0,5 3 ( wy 1 - wy 4 ), (3) wx 3 = 0,5 3 ( wy 1 - wy 2 ), w' x 1 = 0,5 3 ( wy 2 + wy 4 ), w' x 2 = 0,5 3 (wy 2 - wy 3 ), 6 (4) w' x 3 = 0,5 3 (wy 4 - wy 3 ), де: wx1, wx2, wx3, wy1, wy2, wy3, wy 4, - обмірювані датчиками проекції координат на відповідні осі, wx1, wx2 , wx3 , w' x1, w' x2 , w' x3, wy1, wy2 , wy3, wy 4 , w'y1, w' y2, w' y3 , w'y 4 - оцінні значення проекцію координат на відповідні осі. Співвідношення (1),(2),(3),(4) реалізуються в пристрої 20. Порівняння обмірюваних й оцінних значень дозволяє визначити наявність несправних датчиків. При (5) wx1 - w' x1 £ c, wx 2 - w' x 2 £ c, wx 3 - w' x 3 £ c (6) (де с - постійна, обумовлена погрішностями датчиків) всі датчики функціонують нормально й пристрій 23 по зв'язкам 16,17,18 видає сигнали wx1, wx2, wx3. Порушення однієї з умов (5) указує на несправність відповідного основного датчика. У цьому випадку пристрій 23 замість обмірюваного сигналу несправного датчика виробляє оцінне значення відповідного сигналу. Порушення трьох умов у нерівностях (5),(6) указує на несправність додаткового датчика. Для визначення конкретного несправного додаткового датчика перевіряються умови wy1 - wy1 £ c, wy2 - wy 2 £ c, wy3 - wy3 £ c, wy 4 - wy 4 £ c, (7) Порушення однієї з умов (7) указує на несправність відповідного додаткового датчика. Після цього у формулах (3) і (4) замість обмірюваного значення використається відповідне оцінне значення, розраховане по формулі (2). У випадку несправності додаткового датчика пристрій 23 по колишньому видає обмірювані значення основних датчиків. При несправності одного датчика виключається з розгляду та з умов у нерівностях (5),(6),(7), у якій використається обмірюване значення несправного датчика. При несправності другого датчика, визначення його проводиться аналогічно визначенню першого несправного датчика. Таким чином, запропонований спосіб дозволяє визначити не менш двох несправних датчиків і забезпечити при цьому видачу інформації про проекції координат на осі керування транспортних засобів. Застосування запропонованого способу дозволяє зменшити вагу й енергоспоживання системи за рахунок виключення двох датчиків і підвищити надійність через працездатність при несправностях двох будь-яких датчиків. 7 Комп’ютерна верстка В. Клюкін 81711 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of loaded reserving of measuring devices of three-dimensional motion of transport vehicles
Автори англійськоюBandura Ivan Mykolaiovych, Korgenko Oleksiy Vasiliovych
Назва патенту російськоюСпособ нагруженного резервирования измерителей трехмерного движения транспортных средств
Автори російськоюБандура Иван Николаевич, Корженко Алексей Васильевич
МПК / Мітки
МПК: B64C 13/00
Мітки: навантаженого, засобів, резервування, руху, спосіб, транспортних, тримірного, вимірників
Код посилання
<a href="https://ua.patents.su/4-81711-sposib-navantazhenogo-rezervuvannya-vimirnikiv-trimirnogo-rukhu-transportnikh-zasobiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб навантаженого резервування вимірників тримірного руху транспортних засобів</a>
Система резервування вимірників тримірного руху транспортних засобів
Номер патенту: 18796
Опубліковано: 15.11.2006
Автори: Журавльова Надія Костянтинівна, Сагіна Марина Юріївна, Бандура Іван Миколайович
МПК: B64C 13/00
Мітки: резервування, руху, вимірників, система, засобів, транспортних, тримірного
Формула / Реферат:
1. Система резервування вимірників тримірного руху транспортних засобів, що містить три датчики, осі чутливості яких спрямовані уздовж трьох взаємно перпендикулярних осей зв'язаної системи координат керування транспортного засобу, виходи яких з'єднані з пристроєм контролю датчиків, яка відрізняється тим, що в неї введені чотири додаткових датчики, осі чутливості яких спрямовані вздовж осей косокутної системи координат, що розташовані...
Спосіб визначення швидкостей руху транспортних засобів при зіткненні
Номер патенту: 54738
Опубліковано: 17.03.2003
Автори: Байков Валерій Павлович, Кисельов Володимир Борисович, Любарський Костянтин Анатолійович
МПК: B60J 9/00, G01N 19/00
Мітки: спосіб, засобів, швидкостей, руху, зіткненні, транспортних, визначення
Формула / Реферат:
Спосіб визначення швидкостей руху транспортних засобів при зіткненні, що включає визначення сумарних енергетичних витрат, які складаються з робіт сил опору переміщенням транспортних засобів в процесі їх відкидання після зіткнення і робіт деформацій кожного і-того транспортного засобу в момент зіткнення, визначення величин початкових лінійних швидкостей відкидання, які еквівалентні цим енергетичним витратам,...
Спосіб визначення швидкостей руху транспортних засобів при зіткненні
Номер патенту: 39037
Опубліковано: 15.05.2001
Автори: Кисельов Володимир Борисович, Любарський Костянтин Анатолійовий, Байков Валерій Павлович
МПК: G01N 19/00, G01M 17/007
Мітки: руху, зіткненні, швидкостей, транспортних, спосіб, визначення, засобів
Формула / Реферат:
(21) 2001010402(54) (57)Дата прийняття рішення01 березня 2001 р.1. Спосіб визначення швидкостей руху транспортних засобів при зіткненні, що включаєвизначення енергетичних витрат по переміщенню кожного з цих транспортних засобів у процесі їхнього відкидання після зіткнення, які дорівнюють роботам сил опору їхнім переміщенням у плоских рухах, визначення лінійних швидкостей відкидання, еквівалентних цим...
Пристрій кондиціонування повітря для транспортних засобів
Номер патенту: 44514
Опубліковано: 15.02.2002
Автори: Бачок Олег Сергійович, Драпак Георгій Мефодіович, Козак Олег Володимирович
МПК: B60H 3/00
Мітки: пристрій, повітря, кондиціонування, засобів, транспортних
Формула / Реферат:
Пристрій кондиціонування повітря для транспортних засобів оснащений повітропроводом для подачі повітря до салону транспортних засобів, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру, відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру розташовано у повітропроводі, який керує продуктивністю роботи вентилятора.
Пристрій для кондиціонування повітря в салонах транспортних засобів
Номер патенту: 44515
Опубліковано: 15.02.2002
Автори: Козак Олег Володимирович, Бачок Олег Сергійович, Драпак Георгій Мефодіович
МПК: B60H 3/00
Мітки: транспортних, пристрій, кондиціонування, повітря, засобів, салонах
Формула / Реферат:
Пристрій для кондиціонування повітря в салонах транспортних засобів, що оснащений повітропроводом, фільтром, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру з привідною заслінкою, який відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру встановлено у повітропроводі після фільтру, а між вхідним та рециркуляційним каналами встановлено перегородку для заслінки, при цьому заслінку...
Попередній патент: Пристрій для транспортування і очистки коренебульбоплодів
Наступний патент: Пристрій для транспортування і очистки коренебульбоплодів
Випадковий патент: Спосіб гармонізації функціонального стану організму людини