Спосіб визначення швидкостей руху транспортних засобів при зіткненні
Номер патенту: 54738
Опубліковано: 17.03.2003
Автори: Любарський Костянтин Анатолійович, Байков Валерій Павлович, Кисельов Володимир Борисович
Формула / Реферат
Спосіб визначення швидкостей руху транспортних засобів при зіткненні, що включає визначення сумарних енергетичних витрат, які складаються з робіт сил опору переміщенням транспортних засобів в процесі їх відкидання після зіткнення і робіт деформацій кожного і-того транспортного засобу в момент зіткнення, визначення величин початкових лінійних швидкостей відкидання, які еквівалентні цим енергетичним витратам, за якими знаходять шукані швидкості, який відрізняється тим, що для визначення роботи деформацій кожного і-того транспортного засобу, який зіткнувся, візуально встановлюють місця розташування і кількість пі пошкоджених ділянок на його кузові, виміряють глибину ![]() і ширину
і ширину ![]() кожної j - тої пошкодженої ділянки в площині, яка паралельна площині його руху, роботу деформацій wdefji на цій ділянці знаходять за співвідношенням:
кожної j - тої пошкодженої ділянки в площині, яка паралельна площині його руху, роботу деформацій wdefji на цій ділянці знаходять за співвідношенням: ![]() а повну роботу деформацій Wdefi даного транспортного засобу, який зіткнувся, визначають за співвідношенням:
а повну роботу деформацій Wdefi даного транспортного засобу, який зіткнувся, визначають за співвідношенням:
![]() , де
, де ![]() і kji - константи енергоємності при деформуванні транспортного засобу з кожної з його сторін;
і kji - константи енергоємності при деформуванні транспортного засобу з кожної з його сторін; ![]() і
і ![]() - поточні координати глибини і ширини пошкоджень.
- поточні координати глибини і ширини пошкоджень.
2. Спосіб за п.1, який відрізняється тим, що константи енергоємності при деформуванні транспортного засобу з кожної з його сторін вибирають з наступних діапазонів:
- при деформуванні спереду з виходом або без виходу пошкодження на обидві бокові поверхні кузова: Аji =(82...86)кДж/м2, Вji =(17800...18000) кДж/м(5,2…5,6),![]() м, kji = (3,2…3,6);
м, kji = (3,2…3,6);
- при деформуванні ззаду з виходом або без виходу пошкодження на обидві бокові поверхні кузова: Аji = (84...88)кДж/м2, Вji =-(132...138) кДж/м(2,7…2,8), ![]() м, kji = ( 0,7...0,8);
м, kji = ( 0,7...0,8);
- при деформуванні збоку без виходу пошкодження на торцеві поверхні кузова: Аji = (46...50) кДж/м2, Вji = (114.. .118)кДж/м(2,3…2,34), ![]() kji = (0,3...0,34) ;
kji = (0,3...0,34) ;
- при деформуванні спереду з виходом пошкодження на одну бокову поверхню кузова: Аji = (116...120)кДж/м2, Вji =(7...13)кДж/м(l,9...l,7), ![]() kji = (0,1...0,3);
kji = (0,1...0,3);
- при деформуванні ззаду з виходом пошкодження на одну бокову поверхню кузова: Аji = (70...76) кДж/м2, Вji -(7...13)кДж/м(1,37...1,31), ![]() kji = (0,63...0,69).
kji = (0,63...0,69).
Текст
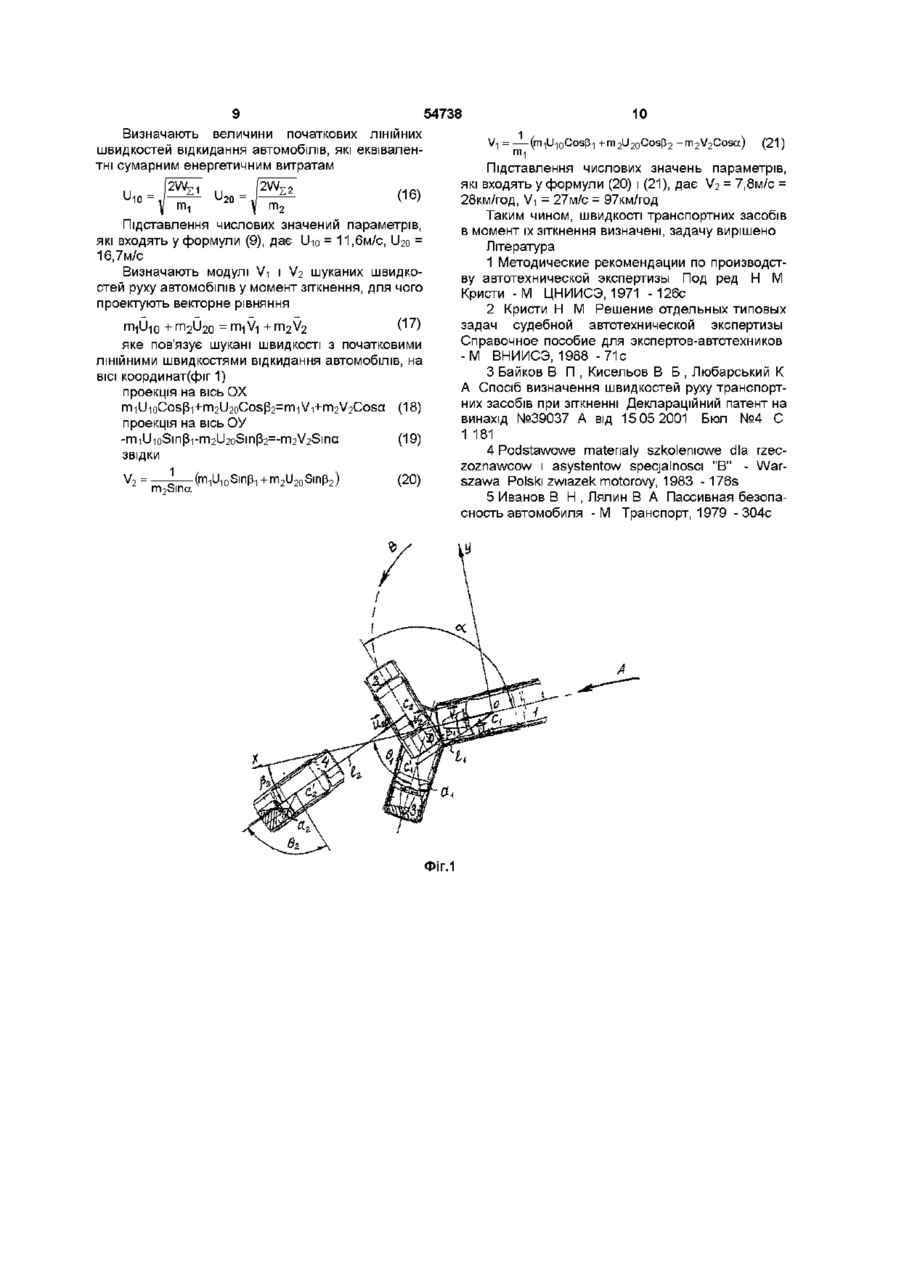
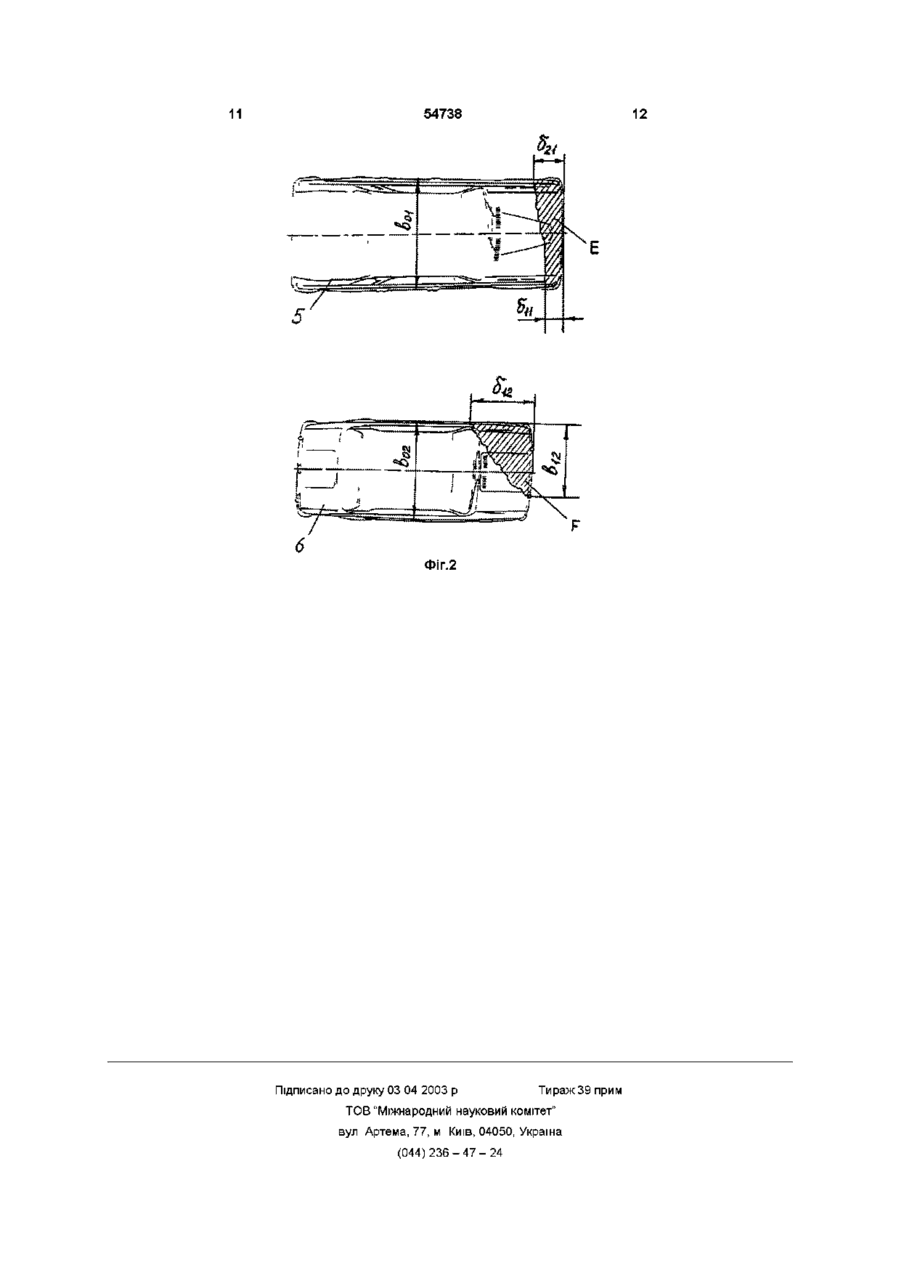
Спосіб визначення швидкостей руху транспортних засобів при зіткненні, що включає визначення сумарних енергетичних витрат, які складаються з робіт сил опору переміщенням транспортних засобів в процесі їх відкидання після зіткнення і робіт деформацій кожного /-того транспортного засобу в момент зіткнення, визначення величин початкових ЛІНІЙНИХ швидкостей відкидання, які еквівалентні цим енергетичним витратам, за якими знаходять шукані швидкості, який відрізняється тим, що для визначення роботи деформацій кожного і-того транспортного засобу, який зіткнувся, візуально встановлюють місця розташування і КІЛЬКІСТЬ П, пошкоджених ділянок на його кузові, виміряють глибину Я,., і ширину б кожної j - тої пошкодженої ділянки в площині, яка паралельна площині його руху, роботу деформацій Wdefji на цій ДІЛЯНЦІ знаходять за співвідношенням j J j j а повну роботу деформацій W^ti даного транспортного засобу, який зіткнувся, визначають за співвідношенням d e f i = Z w d e f j i . Д е A J L B J , , ^ , І к,, - константи ене J=1 ргоємності при деформуванні транспортного засобу з кожної з його сторін, X і 5(5j|,A, X) - поточні координати глибини і ширини пошкоджень 2 Спосіб за п 1, який відрізняється тим, що константи енергоємності при деформуванні транспортного засобу з кожної з його сторін вибирають з наступних діапазонів - при деформуванні спереду з виходом або без виходу пошкодження на обидві бокові поверхні кузова Aj, =(82 86)кДж/м2, В„ =(17800 18000) кДж/м (52 5 6 | A O j i =(0,25 0,35) м, k,, = (3,2 3,6), - при деформуванні ззаду з виходом або без виходу пошкодження на обидві бокові поверхні кузова Aj, = (84 88)кДж/м2, В,, =-(132 138) кДж/м (27 2 8 ) , ХО}І =(0,15 0,25) м, к„ = (0,7 0,8), - при деформуванні збоку без виходу пошкодження на торцеві поверхні кузова А,, = (46 50) кДж/м2, В„ = (114 118)кДж/м(23 2 3 4 ) , A,Ojl =(0,05 0,15)м, к,, = (0,3 0,34) , - при деформуванні спереду з виходом пошкодження на одну бокову поверхню кузова А,, = (116 120)кДж/м2, В„ =(7 13)кДж/м(І9 |7), ХОр =(0,3 0,5)м, к,,= (0,1 0,3), 00 - при деформуванні ззаду з виходом пошкодження на одну бокову поверхню кузова А,, = (70 76) кДж/м2, В„ -(7 13)кДж/м (137 1 3 1 ) , Х0}1 =(0,3 0,5)м, Ю к,, = (0,63 0,69) го 54738 сить обмежене, оскільки на практиці експерт часто має справу з випадками, коли вказані обмеження не виконуються Крім цього, дані способи мають істотний недолік в них не враховується факт ударної взаємодії двох автомобілів при зіткненні, в результаті якого вони отримують пошкодження і відкидаються один від одного, виконуючи при цьому складні рухи Відомо спосіб визначення швидкостей руху транспортних засобів при їх зіткненні, який включає визначення сумарних енергетичних витрат, які складаються з робіт сил опору переміщенням транспортних засобів в процесі їх відкидання після зіткнення і робіт деформацій транспортних засобів в момент зіткнення, які визначаються за сукупністю робіт деформацій їх пошкоджених деталей, визначення величин початкових ЛІНІЙНИХ швидкостей відкидання, які еквівалентні цим енергетичним витратам, за якими знаходять шукані швидкості Вказаний спосіб захищено патентом України №39037 [3] і обрано в якості прототипу Недоліком відомого способу є те, що при визначенні роботи деформації транспортних засобів як сукупності робіт деформацій їх окремих пошкоджених деталей ігнорується конструкційна МІЦНІСТЬ І жорсткість транспортних засобів, які зіткнулися, як єдиних цілих конструкцій, що вносить певні погрішності до кінцевого результату Вказаний недолік може бути усунутий шляхом використання результатів статистичної обробки численних випробувань(сга5п-тестів) транспортних засобів в умовах реальних зіткнень [4, 5] і оцінки на вказаній основі величини роботи деформації конкретного транспортного засобу як єдиної конструкції Задачею винаходу є підвищення точності і зниження вартості визначення швидкостей руху транспортних засобів при різних видах зіткнень, що дозволило б більш об'єктивно оцінити обставини і причини ДТП Для вирішення поставленої задачі в відомому способі визначення швидкостей руху транспортних засобів, який включає визначення сумарних енергетичних витрат, які складаються з робіт сил опору переміщенням транспортних засобів в процесі їх відкидання після зіткнення і робіт деформацій кожного і-того транспортного засобу в момент зіткнення, визначення величин початкових ЛІНІЙНИХ швидкостей відкидання, еквівалентних цим енергетичним витратам, за якими знаходять шукані швидкості, в способі, який пропонується для визначення роботи деформацій кожного і-того транспортного засобу, які зіткнулися, візуально встановлюють місця розташування і КІЛЬКІСТЬ П,, пошкоджених ділянок на його кузові, вимірюють г л и б и н у AJI і ш и р и н у б,, к о ж н о ї J-TOI пошкодженої ділянки в площині, яка паралельна площині його руху, роботу деформацій Wdefji на цій ДІЛЯНЦІ знаходять за співвідношенням О повну роботу деформацій Wdefi даного транспортного засобу, який зіткнувся визначають за співвідношенням w defi = Z wdefji J=1 де А,,, В,, і kji - константи енергоємності при деформуванні транспортного засобу з кожної з його сторін, А і 5(5,і, А,,, А) - поточні координати глибини і ширини пошкоджень Константи енергоємності при деформуванні транспортного засобу з кожної з його сторін, вибирають з таких діапазонів при деформуванні спереду з виходом або без виходу пошкодження на обидві бокові поверхні А„ (82 86)кДж/м' В„ кузова .(5 (17800 18000)кДж/м1 2 5 6) Ао„ =(0,25 0,35)м, к„ = (3,2 3,6), при деформуванні ззаду з виходом або без виходу пошкодження на обидві бокові поверхні кузова А,, = (84 88)кДж/м2, (132 138)кДж/м(27 2Ь), Ао„ =(0,15 0,25) г к„ = (0,7 0,8), при деформуванні збоку без виходу пошкодження на торцеві поверхні кузова А,, = (46 50)кДж/м2, В„ = (114 118)кДж/м(23 2 3 4 ) , Ао„ =(0,05 0,15)м, к„ = (0,3 0,34), при деформуванні спереду з виходом пошкодження на одну бокову поверхню кузова А,, = (116 120)кДж/м, В„ = -(7,0 13)кДж/м(19 1 7 | , Ао„ =(0,3 0,5)м, к„ = -(0,1 0,3), при деформуванні ззаду з виходом пошкодження на одну бокову поверхню кузова А,, = (70 76)кДж/м, В„ = -(2,2 3,0)кДж/м(137 1 3 1 ) , Ао„ =(0,3 0,5)м, к„ = -(0,63 0,69), Креслення пояснюють суть винаходу, на яких зображено на фіг 1 - схема дорожньо-транспортної пригоди, на фіг 2 - схема пошкоджених ділянок автомобілів в горизонтальній площині(види згори) Приклад Необхідно визначити швидкості руху Vi і У2 транспортних засобів в момент їх зіткнення на сухому дорожньому покритті Перший транспортний засіб - легковий автомобіль 1(фіг 1) - рухався в напрямку стрілки А, другий транспортний засіб - легковий автомобіль 2 - виконував лівий розворот в напрямку стрілки В Нехай в момент зіткнення автомобілів в точці первинного контакту О(місце зіткнення) автомобіль 1 мав швидкість руху, яка позначена вектором \/-|, який прикладений до його центру мас С-і, а автомобіль 2 мав швидкість, яка позначена вектором V2 , який прикладений до центру мас СгСфіг 1, розташування автомобілів 1 і 2 ВІДПОВІДНО) Отже, напрямки шуканих швидкостей руху Vi і V2 ВІДОМІ, тому задача зводиться до знаходження їх модулів Задаються прямокутною системою координат ХОУ на поверхні проїзної частини дороги, причому вісь ОХ суміщають з вектором швидкості \/-| Між векторами V] і \?2 утворюється кут а, який визначає вид зіткнення В результаті зіткнення автомобілі були відкинуті таким чином, що їх центри мас Сі і Сг перемістились в прямих напрямках на відстані С-іС-Г = h, і С2С2' = І2 ВІДПОВІДНО При цьому автомобіль 1 мав 54738 початкову швидкість відкидання, яка позначена вектором Сю, прикладеним до центру мас Сі і спрямованим під кутом рі до осі ОХ, а автомобіль 2 - початкову швидкість відкидання, яка позначена вектором U20, прикладеним до центру мас C-z і спрямованим під кутом р2 до осі ОХ Крім того, в процесі відкидання автомобіль 1 розвернуло відносно осі, яка проходить через його центр мас Сі перпендикулярно площині руху(поверхні проїзної частини дороги), на кут 6-і, а автомобіль 2 розвернуло відносно ВІСІ, яка проходить через його центр мас C-z перпендикулярно площині руху, на кут 02 Тобто, при відкиданні автомобілі виконували плоскі рухи і зайняли кінцеві положення 3 і 4(фіг 1) В наведеному прикладі численні значення геометричних параметрів складають h = 4м, Ь = 5,6м, а = 105°, рі = 14°, р 2 = 15°, Єї = 89° = 1,55 радіана, 02 = 58° = 1,01 рад Визначають енергетичні витрати W r e s i і W reS 2 за переміщеннями автомобілів 1 і 2 в процесі відкидання після зіткнення, які дорівнюють роботам сил опору їх переміщенням в плоских рухах [3] Wres1=m1-g-f1'(i1+a1e1) res2 — 1ТІ2 " У " Ї 9 \^ 2 ' С^2^2 / (1) \~) де іти і ніг - маси автомобілів 1 і 2, які дорівнюють 1380 і 1200кг ВІДПОВІДНО, g = 9,81м/с 2 - прискорення вільного падіння IV = iz' = 0,56 - коефіцієнти тертя при боковому ковзанні коліс автомобілів 1 І 2 Об ПОВерХНЮ ПрОІЗНОІ ЧаСТИНИ ДОРОГИ, СН І СІ2 відстані між проекціями центрів мас Сі і C-z на поверхню проїзної частини дороги і точками контакту коліс автомобілів 1 і 2 з цією поверхнею, дорівнюють 1,5м і 1,38м відповідно(фіг 1) Підстановка числових значень параметрів, які входять в формули (1), і (2) дає W r e s i = 48000 Джоулів, W reS 2 = 46100Дж У ВІДПОВІДНОСТІ із способом, який пропонується, для визначення роботи деформацій кожного автомобіля, який зіткнувся, виконуються наступні операції 1 Візуально встановлюють місця розташування і КІЛЬКІСТЬ пошкоджених ділянок на кузовах автомобілів, які зіткнулися, для чого в масштабі зображують їх схеми у горизонтальній площині(види згори) із зазначенням пошкоджених ділянок, які наведені на фіг 2, де поз 5 з пошкодженою ділянкою Е відноситься до автомобіля 1, а поз 6 з пошкодженими ділянками F, G і Н відноситься до автомобіля 2 Таким чином на кузові автомобіля 1 є одна пошкоджена ділянка(пі = 1), а на кузові автомобіля 2 - три таких ділянки(п2 = 3) 2 Вимірюють глибину А,, і ширину 5,, кожної j тої пошкодженої ділянки автомобілів для автомобіля 1, який має пошкодження Е передньої частини по всій ширині автомобіля Ьоі у вигляді трапеції 3 виходом на обидві бокові поверхні кузова, розмір Х,і характеризується двома величинами ки = 0,2м і 5, 1 = 0,4м/ а ширина 5,, характеризується одним ^2 розміром 5 П = Ьоі = 1,8м(фіг2, поз 5), для автомобіля 2, який має три пошкодження, характерні розміри складають наступні величини 1) для першого пошкодження F передньої частини у вигляді трикутника з виходом на одну бокову поверхню кузова ки - 1,1м і 5-І2 = 1,3м, 2) для другого по шкодження G бокової частини у вигляді трикутника без виходу пошкодження на торцеві поверхні кузова Х22 - 0,4м і 522 - 1,2м, 3) для третього пошкодження Н задньої частини у вигляді трикутника з виходом на одну бокову поверхню кузова "к32 = 0,6м і 532 = 0,Зм(фіг 2, поз 6) Примітка Тут і надалі перша цифра підрядкового індексу при літерових позначеннях відноситься до порядкового номеру параметру, а друга цифра - до порядкового номеру автомобіля З Знаходять роботу деформацій wdefji на всіх пошкоджених ділянках автомобілів за співвідношенням Wdelji = J k i +В]І(л.-Л.0]І)к' " У ^ Д , , , ^ J 0L (3) З 1 Для автомобіля 1 пошкодження Е трапецієвидної форми у передній частині кузова з виходом на його обидві бокові поверхні представляється у вигляді суми двох складових 1) пошкодження прямокутної форми зі сторонами ки і 5ц = Ьоі і 2) пошкодження у формі прямокутного трикутника з катетами Ьоі і (к2\ -ки) (фіг 2, поз 5) Тоді шукану роботу деформацій на цій ДІЛЯНЦІ можна визначити як суму двох складових робіт Wdefii=w'defii+w"def11 (4) Для першої складової, 0 < к ^ ки поточна координата ширини пошкодження визначається виразом 5 = би = Ьоі = const (фіг 2, поз 5), і формула (3) буде мати вигляд w 'defH= (5) j О Для другої складової, X Ц < X < Х21, поточна координата ширини пошкодження визначається виb 01 Х2-\-Х) Я-21 мула (3) буде мати вигляд разом 5= иЄП 1 І | І І І IV U І Iі (фіг 2, поз 5), і фор І л л Інтегрування формул (5) і (6) за поточною координатою глибини пошкоджень к, підстановка отриманих виразів у (4) і математичні перетворення і спрощення останнього приводить до алгебраїчної розрахункової залежності )К
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining velocities of vehicles at collision
Автори англійськоюBaikov Valerii Pavlovych, Kyseliov Volodymyr Borysovych
Назва патенту російськоюСпособ определения скоростей движения транспортных средств при столкновении
Автори російськоюБайков Валерий Павлович, Киселев Владимир Борисович
МПК / Мітки
МПК: B60J 9/00, G01N 19/00
Мітки: руху, визначення, засобів, транспортних, швидкостей, спосіб, зіткненні
Код посилання
<a href="https://ua.patents.su/6-54738-sposib-viznachennya-shvidkostejj-rukhu-transportnikh-zasobiv-pri-zitknenni.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення швидкостей руху транспортних засобів при зіткненні</a>
Спосіб визначення швидкостей руху транспортних засобів при зіткненні
Номер патенту: 39037
Опубліковано: 15.05.2001
Автори: Любарський Костянтин Анатолійовий, Кисельов Володимир Борисович, Байков Валерій Павлович
МПК: G01M 17/007, G01N 19/00
Мітки: швидкостей, зіткненні, руху, транспортних, спосіб, визначення, засобів
Формула / Реферат:
(21) 2001010402(54) (57)Дата прийняття рішення01 березня 2001 р.1. Спосіб визначення швидкостей руху транспортних засобів при зіткненні, що включаєвизначення енергетичних витрат по переміщенню кожного з цих транспортних засобів у процесі їхнього відкидання після зіткнення, які дорівнюють роботам сил опору їхнім переміщенням у плоских рухах, визначення лінійних швидкостей відкидання, еквівалентних цим...
Вузол зчленування пасажирських транспортних засобів
Номер патенту: 18199
Опубліковано: 01.07.1997
Автор: Патрило Юрій Євгенович
МПК: B60D 5/00
Мітки: засобів, пасажирських, вузол, зчленування, транспортних
Формула / Реферат:
Вузол зчленування пасажирських транспортних засобів, який містить між переднім i заднім транспортними засобами перехідну платформу, який відрізняється тим, що додатково обладнаний зчіпним пристроєм, а перехідна платформа має дві осі, якими прикріплена до транспортних засобів, однією - до переднього, а Іншою - до заднього.
Пристрій кондиціонування повітря для транспортних засобів
Номер патенту: 44514
Опубліковано: 15.02.2002
Автори: Драпак Георгій Мефодіович, Козак Олег Володимирович, Бачок Олег Сергійович
МПК: B60H 3/00
Мітки: кондиціонування, транспортних, засобів, пристрій, повітря
Формула / Реферат:
Пристрій кондиціонування повітря для транспортних засобів оснащений повітропроводом для подачі повітря до салону транспортних засобів, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру, відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру розташовано у повітропроводі, який керує продуктивністю роботи вентилятора.
Радіолокаційний вимірювач параметрів руху наземних транспортних засобів
Номер патенту: 23871
Опубліковано: 16.10.2000
Автор: Непорада Сергій Миколайович
МПК: G01S 11/00
Мітки: параметрів, радіолокаційний, наземних, транспортних, вимірювач, засобів, руху
Формула / Реферат:
Радиолокационный измеритель параметров движения наземных транспортных средств, содержащий соединенные СВЧ генератор и циркулятор, две приемо-передаю-щие антенны, смеситель, выход которого соединен с входом усилителя доплеровских частот, который через фильтр с фазовой автоподстройкой частот соединен с устройством измерения пройденного пути, скорости и ускорения, отличающийся тем, что выход циркулятора соединен со входом дополнительно...
Пристрій для кондиціонування повітря в салонах транспортних засобів
Номер патенту: 44515
Опубліковано: 15.02.2002
Автори: Драпак Георгій Мефодіович, Бачок Олег Сергійович, Козак Олег Володимирович
МПК: B60H 3/00
Мітки: кондиціонування, салонах, засобів, повітря, пристрій, транспортних
Формула / Реферат:
Пристрій для кондиціонування повітря в салонах транспортних засобів, що оснащений повітропроводом, фільтром, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру з привідною заслінкою, який відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру встановлено у повітропроводі після фільтру, а між вхідним та рециркуляційним каналами встановлено перегородку для заслінки, при цьому заслінку...
Попередній патент: Склокристалічна зносостійка емаль
Наступний патент: Клиновий прес
Випадковий патент: Спосіб корекції похибки вимірювального каналу електроенергії